Abstract
This research proposes a fractional-order adaptive neural control scheme using an optimized backstepping (OB) approach to address strict-feedback nonlinear systems with uncertain control directions and predefined performance requirements. The OB framework integrates both fractional-order virtual and actual controllers to achieve global optimization, while a Nussbaum-type function is introduced to handle unknown control paths. To ensure convergence to desired accuracy within a prescribed time, a fractional-order dynamic-switching mechanism and a quartic-barrier Lyapunov function are employed. An input-to-state practically stable (ISpS) auxiliary signal is designed to mitigate unmodeled dynamics, leveraging classical lemmas adapted to fractional-order systems. The study further investigates a decentralized control scenario for large-scale stochastic nonlinear systems with uncertain dynamics, undefined control directions, and unmeasurable states. Fuzzy logic systems are employed to approximate unknown nonlinearities, while a fuzzy-phase observer is designed to estimate inaccessible states. The use of Nussbaum-type functions in decentralized architectures addresses uncertainties in control directions. A key novelty of this work lies in the combination of fractional-order adaptive control, fuzzy logic estimation, and Nussbaum-based decentralized backstepping to guarantee that all closed-loop signals remain bounded in probability. The proposed method ensures that system outputs converge to a small neighborhood around the origin, even under stochastic disturbances. The simulation results confirm the effectiveness and robustness of the proposed control strategy.
1. Introduction
In order to accomplish stability, the unpredictable unidentified behavior of fractional-order nonlinear (FON) frameworks was handled by using the estimated effectiveness of neural networks (NNs) or fuzzy logic systems. In [1], an adaptive-control method based on NN properties was proposed for FON frameworks via an actuator malfunction. In [2], a fuzzy controller was designed for nonstrict-feedback FON frameworks. Liu et al. [3] presented an interdisciplinary backstepping control method for nonaffine FON frameworks exhibiting uncertain interactions resulting in consistency. In [4], a Lyapunov-based finite-time uncertain controller was designed for FON tumor structures undergoing treatment. The research and experiences listed earlier do not consider the impact of comprehensive system limitations on FON frameworks. It is worth emphasizing this. Recently, Chu et al. [5] investigated a modified technique for the electrical responses of discrete FON biophysical neural network models and their dynamical reactions. Chu et al. [5] examined the complex adaptive-learning cortical NN system for addressing time-fractional difference equations with bursting and mixed-mode oscillation patterns. Alzahrani and Rashid [6] proposed a comprehensive systematic review of the network design model for topology control and routing synergy in wireless sensor networks for prolonged longevity. Rashid et al. [7] expounded on the perspectives for mixed-mode oscillations of fractional neural network approaches to the analysis of neurophysiological data from the perspective of the observability of complex networks. Rashid et al. [8] derived new computations of the fractional worm transmission model in wireless sensor networks in view of a new integral transform with statistical analysis. Chu et al. [9] presented complex adaptive-learning cortical NN systems for solving time-fractional difference equations with bursting and mixed-mode oscillation behaviors.
Network restrictions are a common issue in commercial and pragmatic mechanisms, reducing effectiveness and causing instabilities. The barrier-based Lyapunov functional is an advantageous instrument for preventing state restrictions from being violated in FON frameworks, and numerous limitation-control algorithms have been developed [10,11]. In [11], an observer-based adaptive NN control method was developed for nonstrict-feedback FON frameworks featuring an outcome requirement. This algorithm ensures that tracking errors fulfill limitations. In [12], an ensemble adaptive-control approach was constructed for many FON frameworks with limitations, and the barrier-based Lyapunov functional was used to regulate output within a predetermined region. In [13], an adaptive dynamic interface control strategy for FON frameworks employing asymmetrical status requirements was constructed utilizing an unbalanced barrier-based Lyapunov functional. However, the features of the controlling signal that enter ought to be avoided and disregarded.
Optimized control is an oversight strategy that maximizes or minimizes particular effectiveness measures for an unpredictable system [14]. However, we can find the optimum management technique by building and analyzing the Hamilton–Jacobi–Bellman (H–J–B) formula [15] for the mechanism under consideration. In fact, the scenario in real networks is complicated and changing; it is highly challenging to reach excellence in optimal oversight. Recently, an approach known as optimized backstepping (OB) was initially presented [16]. The fundamental concept is to address the respective subsystem’s H–J–B problem while constructing the optimized virtualized control and the optimized actual control in order to accomplish global optimization. Wen et al. [17] reduced the OB method construction approach for greater generalization. Several researchers have created multiple optimized control methods for a number of networks using the modified OB approach [18]. Li et al. [19] created a condition-constrained productivity measure for unpredictable processes and proposed an OB regulation approach to limit state variability. Li et al. [20] proposed a state-observer-based OB controlling approach for strict-feedback (SF) nonlinear structures with unnoticed conditions. Zhang et al. [21] proposed an observer-based OB controlling technique for SF structures involving configuration and source restrictions, building on [20]. However, the control mechanisms listed earlier only ensure system reliability.
In contemporary manufacturing environments, it is frequently essential to meet predetermined effectiveness specifications, which primarily comprise two aspects: (i) attaining control targets over a predetermined time frame and (ii) bringing the system’s monitoring or regulatory inaccuracies into conformity with predetermined precision. Several analogous findings have been documented and reported as the hypothesis of control has evolved [22,23]. Indeed, Chen et al. [24] employed Barbalat’s argument and three -group mappings to create a universal regulator over SF nonlinear structures that permits the measurement inaccuracy to approach predetermined correctness. Li et al. [25] offered observer-based regulation techniques for probabilistic SF networks, resulting in mean-square stability within a particular time frame. Interestingly, these automation systems only provide predetermined duration and precision monitoring. Because of the intricate nature of unpredictable nonlinear structures, it is incredibly challenging to achieve sufficient deviation convergence values regarding the predetermined reliability in the duration specified. Zhou et al. [26] proposed a method of regulation for SF mechanisms involving a time-dependent transitioning function and the barrier Lyapunov function. This approach promises monitoring within the predefined degree of the convergence process and preciseness throughout the predefined time according to a single confined initial condition. While there has been significant success in controlling predefined functionality for numerous platforms, there has been insufficient investigation into unpredictable control approaches.
Control approaches for nonlinear structures address the issue of uncertain controlling paths, which can lead to network destabilization or implosion [27,28,29]. Regarding output-feedback structures featuring unidentified regulation instructions, the observation-based condition-control methodologies presented in [28,29,30] handle unanticipated perturbation and actuation failure issues, respectively. Wu et al. [31] suggested an approach to controlling for unpredictable SF networks involving state delays, which addresses the issue of uncertain controlling choices. Liu et al. [32] developed an algorithm for controlling unpredictable SF machines featuring undetermined regulation advances, allowing the error spectrum to approximate predetermined correctness. However, their monitoring method prevented predetermining the amount of time required to fulfill the oversight target.
Stability analysis and influence modeling of stochastic nonlinear phenomena have gained popularity in recent years due to their significance in various real-world applications, such as hydrogen, thermal energy, biochemical, financial, and immunological techniques. Itô stochastic formulations, along with parametric effective regulation frameworks and uncertain mechanism regulation schemes [33,34], have been employed to develop various techniques for stochastic nonlinear mechanism filtering and regulation, including filter development [35], sliding-mode controller conception [36], and T–S approaches involving uncertain influence or uncertain interpolating regulation conception [37]. Recently, the widely utilized OB methodology was exploited to address stochastic complex networks (see [38]). In [33], the OB strategy for unpredictable individual-input/output complex environments was examined using the quartic Lyapunov functional. In [39], an accurate adaptive OB development strategy was suggested for unpredictable individual-input/output complex assemblies exhibiting unmodeled interactions using the small-gain hypothesis. These findings have been adapted to probabilistic complex systems with massive scales, and dynamic decentralized backstepping controlling techniques were devised in [40,41]. Note that these outcomes only apply to complex systems when their nonlinear features have been determined or are capable of being accurately parameterized. Thus, approaches are unable to be employed in stochastic processes containing hierarchical uncertainty.
Intelligent control techniques have gained significant attention in recent years for managing dynamic and nonlinear systems, particularly in cases where conventional PID or model-based controllers prove inadequate. One such approach was presented in the study “Development of an Adaptive Fuzzy-Neural Controller for Temperature Control in a Brick Tunnel kiln”, where the authors [42] developed an adaptive fuzzy–neural controller. This research proposed a hybrid system that combines neural networks with fuzzy logic to address the challenges of temperature regulation in a brick tunnel kiln—an industrial process characterized by strong nonlinearity and time-delay. In this approach, the fuzzy inference system incorporates expert knowledge through a set of rules, while the neural network module adaptively tunes the fuzzy parameters to enhance performance under varying operating conditions. Yao et al. [43] investigated model reference adaptive tracking control for hydraulic servo systems using nonlinear NNs.
Numerous NN OB control development techniques and adapted uncertain techniques have been created over the past decade to address the previous problem for stochastic nonlinear networks containing entire undetermined exponential functionalities (for instance, see [44]). Wang et al. [45] examined control strategies regarding adaptive uncertainty or NN state feedback for a group of single-input/output unpredictable nonlinear mechanisms. Tong et al. [46] contemplated adapted feedback suggestions for regulators for individual-input/output stochastic nonlinear systems. Li et al. [47] established adapted uncertain and decentralized result control layout strategies based on NNs to stabilize a class of large-scale stochastic nonlinear networks. While adaptive-uncertain and NN OB approaches have made substantial advancements in stochastic complex oversight, the current solutions overlook unpredictable settings involving undetermined input directions. As pointed out in [47,48], unidentified control tendencies might occur in various operational mechanisms, making the control layout resilient and hard. Wang et al. [49] investigated the adaptive-uncertain controlling issue pertaining to unpredictable stochastic nonlinears involving uncertain input orientations. Yu et al. [50] explained a Razumikhin–Nussbaum argument that was developed for probabilistic dynamic time-delay networks involving undetermined regulation flow. This argument has been broadened to include probabilistic pure-feedback time-delay structures [51]. The findings presented in [49,50,51] require immediate assessment of controllable network states, making them ineffective for solving outcome control via feedback problems. The Nussbaum function paradigms suggested in [51,52] are limited to individual input/output stochastic nonlinear structures and are not applicable to probabilistic enormous-scale nonlinear networks.
The controlling procedure for practical architectural engineering typically requires effort to transfer information to controls, resulting in system-generated inefficiencies and serving as a primary driver of system effectiveness degradation. Several successful strategies for dealing with significant feedback latency have been discovered for FON systems [53,54]. Geng et al. [53] determined the feedback controller for an FON system with incoming latency, constructed employing the Smith prediction. Keighobadi et al. [54] detailed an enhanced adaptive-control approach using function estimation for FON systems, including feedback latency. In [55], a command-filter-based adaptive regulator for FONSs with signal latency was created utilizing the fractional integral. Tong and Li [56] investigated an adaptive NN controlling approach for FON systems with signal latency, devised utilizing the supplemental mechanism. Jian et al. [57] examined an adaptive neural OB approach for fuzzy systems involving unidentified control paths and their predefined accuracy. To date, no published studies have addressed adaptive neural-optimized control for fuzzy systems with unidentified regulatory paths and predefined performance requirements in FON systems and stochastic data-driven techniques.
Inspired by the aforesaid methodologies, this research proposes an adaptive NN controlling approach using the OB methodology for SF applications involving undetermined variable orientations and predetermined efficiency. The oversight approach ensures that the system’s tracking error settles to a predetermined precision in a predetermined time while maintaining a low effectiveness factor. We summarize the research’s significant achievements in three key areas:
- This work introduces a novel approach for predetermined-time and precision control within an SF framework using unknown control directions and the Mittag–Leffler input-to-state practical stability Lyapunov function (MLISPSLF). It establishes sufficient conditions for fractional-order systems to guarantee a memory-dependent signal with convergence of measurement error to a predefined accuracy within a fixed time.
- The proposed optimization method decomposes the performance index into distinct error terms using the OB methodology. This improves efficiency over the existing predetermined performance control techniques [58] by reducing control efforts. Unlike [59], generic-class functions are employed for Lyapunov estimates, broadening applicability. The MLISPSLF framework extends classical input-to-state practical stability results [60] to fractional systems.
- A Nussbaum-type function is utilized to handle uncertain control directions in memory-dependent fractional systems, distinguishing the method from conventional OB control schemes [17]. The simulation results confirm the effective achievement of the control objectives.
- The adaptive decentralized stabilization scheme addresses fractional-order uncertain stochastic nonlinear large-scale systems with unknown dynamics, unrestricted states, and inputs. Fuzzy fractional-order logic systems are leveraged alongside the Mittag–Leffler function for modeling unknown nonlinearities, with an observer designed for estimating unmeasured disturbances.
- A novel Nussbaum function property is introduced to tackle uncertain fractional control directions in decentralized output-feedback loops. Combining OB techniques with this property yields an adaptive-uncertain decentralized control strategy ensuring stochastic boundedness of closed-loop signals and convergence of estimation errors to a small neighborhood of the origin.
2. Preliminaries and System Descriptions
Notations. In what follows, represents the set of natural numbers, and has emerged as the Euclidean space with dimension . refers to a set of functions from to with -order continuous derivatives. represents the absolute value of real/complex number, whereas and represent the Euclidean norm of vectors and norm for temporal functions, respectively. Assuming two mappings, and , are computable, and then . A function with class is continuous, strictly monotone, and has . When as , then represents a function with class . Similarly, represents a collection of mappings if has emerged as a function with classification with regard to the fixed and drops and anticipates 0 as for the specified . For vector represents the initial element in ; that is,
The following section introduces significant meanings and lemmas for Caputo fractional-order operators.
Definition 1
([61]). The Caputo fractional-order derivative of with order can be expressed as
where is a non-negative integer with , and defines the Gamma function.
Definition 2
([61]). The Mittag–Leffler function, involving parameters α and , is specified as
where ς denotes a complex quantity. If then becomes a single-parameter Mittag–Leffler function, which can be expressed as
Lemma 1
([61]). For and the subsequent variant satisfies
where , and is a constant.
In the 20th century, Jiang and Praly [62] suggested various stability analyses for classical systems . These concepts are crucial for control concerns like stable control and nonlinear stabilization. Input-to-state stability [62] plays a crucial role in the design of controllers for systems with unmodeled behavior. It allows for the creation of a memorizing signal to prevent incorporating unidentified state factors instantly into the controller. Jiang and Praly’s [62] conclusions only apply to integer-order unmodeled phenomena and therefore are not applicable to FON ones. To address unmodeled FON behavior, we introduce the Mittag–Leffler input-to-state operational stabilization Lyapunov function and define an essential requirement for FON systems that possess it. Assume that the FON system is
where indicates the state variable, is considered to be external input, and is continuously differentiable function.
Definition 3
([63]). The solution of system (2) is input-to-state operational stabilization concerning For a function of class , a mapping of class , and a fixed number such that, for locally bounded controlling input as well as for some initial requirement fulfills
To prove Lemma 3, we start by introducing a helpful concept and specify complete monotonicity.
Lemma 2
([63]). For and for any fixed the following identity satisfies
Definition 4
([64]). Assume that there is a completely monotonic mapping defined on if possesses differentiation up to ℓ and hold
Lemma 3.
Assume that there is an FON system (2) containing locally bounded control input Consider origin to be a steady state of (2) and ∃ continuously differentiable and locally Lipschitz mapping such that
the value of is input-state practically stable with regard to , while the function that results is referred to as the Mittag–Leffler input-state practically stable Lyapunov candidate, where are functions and and constitute integers.
Proof.
Under the assumption of (6), ∃ a mapping such that
Applying the Laplace transform in terms of Caputo sense [61] on both sides of (7), we get
where , and Implementing the inverse Laplace transform yields
where ★ serves as the convolution operator. Lemma 1 states that
Considering the aforesaid variant, we can conclude that and are non-negative; we obtain
where Using the fact of Lemma 2, we find
So, (11) can be expressed as
Implementing (5), we obtain
is completely monotone for and Thus, Definition 4 states that is a monotonically decreasing function for . Furthermore, results from [65] lead to Therefore, represents a class of functions . Given that is an expression of class , we may conclude that is also a function of class . Based on Definition 3, is input-state practically stable concerning . The documentation is completed. □
Lemma 4.
If framework (2) possesses a Mittag–Leffler input-state practically stable Lyapunov candidate, eventually, for every fixed value and some , any continuous mapping and , and ∃ a finite a positive bounded mapping stated on and a signal is described as
where and
Proof.
From (6) (analogous to the demonstration of Lemma 3), applying the Laplace and inverse Laplace transforms on both sides of (15) produces the outcome
According to (6) and (17), we have
where Thus, we deduce that for . Because and , it follows that . Furthermore, and are monotonically non-increasing mappings for (as seen in Lemma 3), which indicates and combined by So, (18) yields
Assume that For and , there must be such that , resulting in (16). This concludes the proof. □
2.1. Problem Formulation
The FON SF framework with uncertain controlling orientations is examined as
where , where represents the structure state, represents an independent smooth function, comprises the control data, and represents the system output. The control orientation, , represents an undetermined constant.
Control mechanism: In SF nonlinear structures involving uncertain control prescriptions, an optimized controller is implemented for guaranteeing every signal in scheme (20) is confined. The results of the system can monitor the source signal while allowing the tracking error to get closer to a predetermined precision over time.
Remark 1.
Numerous control algorithms were proposed for nonlinear networks involving uncertain control orientation and predetermined effectiveness [27,28]. However, these oversight strategies do not allow you to configure the monitoring duration in advance. This study proposes a control approach where the duration characteristic can be freely chosen to ensure that the tracking error tends to a predefined interval in a predetermined time.
To simplify the argument, this study makes a specific hypothesis:
Hypothesis 1
([26]). The reference signal and its differentiation
2.2. Nussbaum-Type Criteria
Definition 5
([66]). Let define a mapping that, based on the identity, has both the upper and lower integrals approach ∞ and can be represented as follows:
Thus, Definition 5 makes clear that the Nussbaum function provides an unlimited transforming frequency and intensity. The most frequently encountered Nussbaum functions for controlling include , and . This study uses for establishing a control system.
Lemma 5
([66]). For the SF nonlinear framework (2), the subsequent variant satisfies:
where represents the smooth function with and , which are unknown constants. Consequently, and
2.3. Radial Basis Function NN (RBFNN)
It is widely acknowledged that RBFNNs are highly effective at approximating arbitrary nonlinear mappings [67]. For any continuous mapping specified within the compact set the subsequent NN can be expressed as
where represents the optimum density vector, is the supplied vector, is an undetermined fixed number, and represents the basis function vector as
where stands for center, for increment, and ℓ for node number.
2.4. Transform Operator
In order to solve the predetermined efficiency monitoring issue, the transformation function that follows is shown as
where represents the predetermined time, and ℵ is the layout factor.
Lemma 6
([26]). The function (26) exhibits the subsequent qualities:
- (1)
- (2)
- increases monotonically from 0 to and remains constant at in
- (3)
- is a differentiable mapping and
Lemma 7
([68,69]). For all the subsequent variant satisfies
where and
3. Control Scheme Design and Stability Analysis
The following section introduces the adaptive NN controllers for the FON system (25). Depending upon the suggested controllers, a new adaptive NN controller is developed to lessen interface strain.
Optimized Controller Design
This work employs to create the optimized artificial control and performs the subsequent coordinate inversion as
where represents the error factor.
Case (1): In this study, the effectiveness index function is constructed to guarantee that tracking errors gradually tend to a predetermined reliability as
where represents the initial artificial controller.
Consider being a compact set and as the accepted controlling set of . Furthermore, the optimized effectiveness index function is defined as follows:
The computation of using (28) produces
Additionally, we acquire
Figuring out the formula for , we obtain
Assume that
with Also, with The expression is disassembled as follows:
where denotes the layout factor.
As and represent undefined processes, the present research employs NNs to determine them in the manner outlined below:
where and are optimal strengths; and are basis vectors; and represent estimate inaccuracies; and are undetermined positive values, respectively.
Obviously, the initial artificial controller can be created as
involving the conditions
where and constitute architectural values and represents a positive-definite matrix.
Case (i) As a result of no limitation regarding the th error factor, we construct the th efficiency index formula below:
where constitutes the th artificial control.
Suppose is considered the feasible control collection for . According to the previous one, we specify as
Determining results in
where , including
Analogous to Case (1), we can determine by using the formula as
Assume that involving Therefore, the factor can be articulated as
where is the layout factor.
In an analogous way, we estimate unidentified functions and using NNs as follows:
where and represent appropriate strengths. The variables and indicate basis function vectors, and represent estimation errors, and and comprise undetermined non-negative factors.
Next, we create the th artificial control as
containing
where and act as design values, and represents a positive-definite matrix.
Case (): The efficiency index mapping within the control is outlined below:
where denotes the real controller.
Suppose is considered the feasible control collection for . Analogously, we define as
Computing results in
where , including
After calculating the formula we get
Assume that involving Also, alongside
The expression can be reduced as follows.
where is the layout factor.
The NNs estimate and in the following way:
where and represent appropriate strengths. The variables and indicate basis function vectors, and represent estimation errors, and and comprise undetermined non-negative factors.
Next, we create the th artificial control as
containing
where and act as design values, and represents a positive definite matrix.
4. Stability Analysis
Theorem 1.
SF dynamical structures (20), optimized virtual controls (39) and (50), optimized real control (61), and adaptation principles (40), (51), and (62) ensure that the subsequent findings are generally true. (i)The signals in structure (20) remain bounded. (ii)The tracking deviation ε merges to a specified precision during a predetermined time .
Proof.
In the following documentation, indicates represents , and is employed for , respectively.
Case I: Assuming the predefined tracking preciseness, we construct the Lyapunov function choice in the following way:
Taking into account (32), we have
Employing Lemma 4 to address specific factors in (64), we find
Using the descriptions of and , we can derive
Putting (67) and (68) into (66) produces
where , and indicates an upper limit on , while is the maximum eigenvalues of matrix . Also, is the minimum eigenvalues of matrix
Case : () in contrast to Case (1), we specify the Lyapunov function choice for Case () simply written as
Evaluating produces
Similar to (65) and using Lemma 4 provides
It follows that
By inserting (74) and (75) into (73), one gets
where and represents the upper bound on , is the highest eigenvalue of matrix , and is the lowest eigenvalue of matrix .
Case : Parallel to Case (1), we construct the Lyapunov function choice as follows:
The Caputo form of is
Employing Lemma 4 provides
As mentioned before, the subsequent inequalities exist as follows:
By inserting (81) into (80), we get
where , and represents the upper bound on ; is the highest eigenvalue of matrix , and is the lowest eigenvalue of matrix .
Following the previous study, we determine as
According to (69), (76), and (82), the subsequent inequality possesses
where , and . Furthermore, Definition 5 states that , and This implies that , , and , implying that and Using the equation , we may conclude that , implying that . It suggests that and since and are bounded, which reveals . Using an analogous inquiry, we can generate and Thus, the initial component of Theorem 1 is verified.
Furthermore, if , it concludes that
Ultimately, the tracking error can reach the predefined precision throughout the specified time . To summarize, the argument in support of Theorem 1 is accomplished. □
Theorem 2.
Suppose the supposition of Lemma 4 is fulfilled for mechanism (20). The proposed virtualized control (38), ultimate controller (50), and adaptation rules (61) can ensure
(a) Every signal within a closed-loop structure remains bounded.
The signal tends to a small neighborhood around its starting point.
Proof.
By means of the formulation of along with the evidence that , it is evident that is continuous in . Additionally, a positive constant occurs to ensure that
Choosing
Considering (88), there are additionally two instances:
Case (1): If then the result indicates that is bounded, and, since , it follows that is also bounded. So, ∃ a non-negative fixed value such that Then, (88) reduces to
Case (2): If then this indicates that Therefore, (88) can be expressed as
Given that alongside the subsequent inequality applies to both scenarios.
where satisfies and satisfies In view of (91), we can identify a positive mapping such that
Performing the Laplace transform on (92), we get
It follows that
where and indicate the Laplace transforms of and , respectively. Applying the inverse Laplace transform to (93), we obtain
where ★ indicates the convolutional process. Lemma 1 leads to the subsequent variants:
where and are fixed constants. It is worth mentioning that , and, employing the aforesaid variants, we obtain
Consequently, variables , and ℏ are bounded, implying that is also bounded. Since and are bounded, we can conclude that is also bounded. The boundedness of and implies that is bounded. Using , we can determine the boundedness of . We can gradually achieve the boundedness of and . Furthermore, using (94), one obtains By selecting suitable criteria, we may ensure that converges to a small neighborhood of the origin. The evidence is finished. □
5. Experimental Examples
In this section, we conduct a few modeling experiments to illustrate the effectiveness of the suggested strategy.
Example 1.
A collection of modeling exercises are conducted for the subsequent FON systems:
where , and the corresponding signal The suggested layout phases can result in the subsequent controls:
containing
where
In the modeling process, we select the following settings: For , and we designed 32 clusters with evenly dispersed centers in the range and lengths of 1. Furthermore, the predetermined precision , whereas the predefined time
The model’s initial settings have been determined as , and
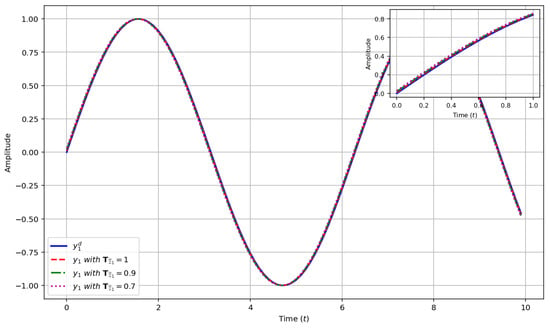
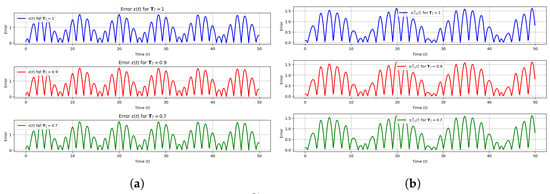
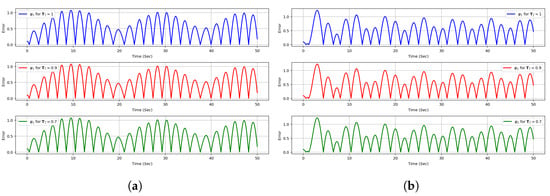
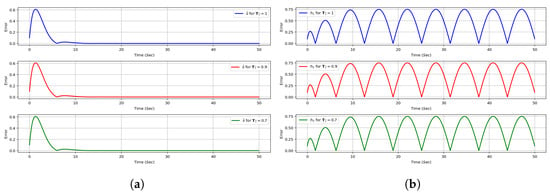
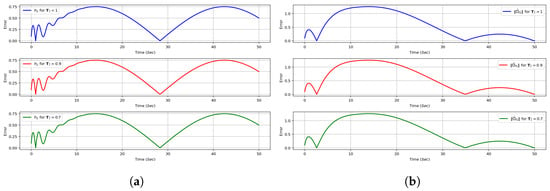
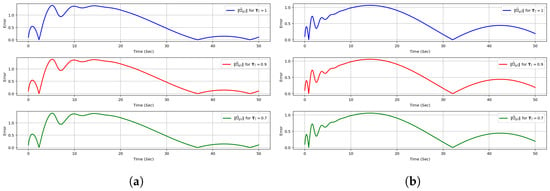
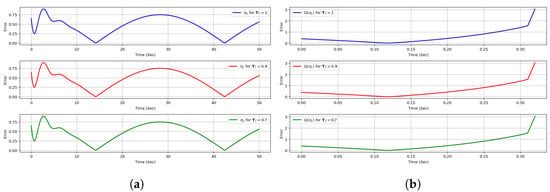
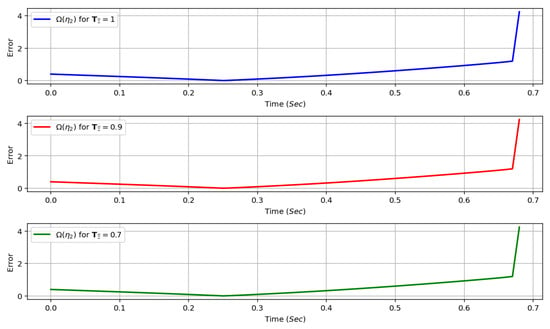
Figure 1, Figure 2, Figure 3, Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8 show the modeling outcomes. Figure 1 shows an analogous path and the output results in various predetermined times. Figure 2a,b show that the technique’s tracking failure continually fluctuates inside the time frame Figure 3a,b depict the paths of network failures and . Figure 4a,b display the paths of the optimized control at various predetermined times. Figure 5b and Figure 6a show the cost function dynamics for and , respectively. Figure 6a,b, Figure 7a,b, and Figure 8a show the trends of , and and at various predefined times.
Figure 1.
Solution profiles for and .
Figure 2.
Solution profiles for (a) and (b) .
Figure 3.
Solution profiles for (a) and (b) .
Figure 4.
Solution profiles for (a) and (b) .
Figure 5.
Solution profiles for (a) and (b) .
Figure 6.
Solution profiles for (a) and (b) .
Figure 7.
Solution profiles for (a) and (b) .
Figure 8.
Solution profile for .
Example 2.

Simulations are undertaken to compare the suggested method’s performance to the monitoring technique in [70] regarding an SF mechanism featuring unspecified control orientations. The structure of the framework is presented as
where , and corresponding signal For this research test, the predefined precision is , and the predetermined runtime is one second. We employ an analogue controller approach and change settings to attain equivalent controlling efficacy in the proposed study and the strategy adopted in [70]. Using the control approach suggested in this work, the controller’s structure is constructed in the following manner:
with , and
Using the control approach given in [70], the control system is constructed as follows:
with
where , and Considering and , we generated 31 networks with evenly dispersed centers in the range and width of 1. Liu et al. [70] provide detailed descriptions of the expressions .
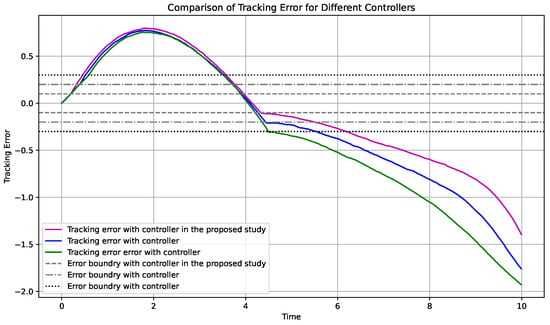
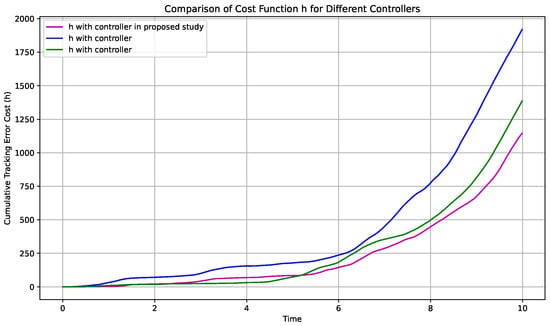
Figure 9 and Figure 10 show that the developed control technique is considerably less costly than typical fixed-functionality controllers with comparable controlling efficacy. We use the integrated absolute cost and integrated temporal absolute cost to assess cost effectiveness. Table 1 summarizes the empirical data, demonstrating the optimized controller’s cost reductions.
Figure 9.
Control capabilities for the FON system (98) for [57,70]. The blue line represents the tracking error and error boundary control scheme proposed by Jian et al. [57] (2023), while the green line corresponds to the method by Liu et al. [70] (2022).
Figure 10.
Cost Cost function dynamics of for three control schemes illustrated in the trajectory plot. The blue line represents the control scheme proposed by Jian et al. [57] (2023), while the green line corresponds to the method by Liu et al. [70] (2022).
Table 1.
Comparison analysis of proposed scheme.
6. Stochastic Analysis
Assume a large-scale nonlinear framework with subsystems associated via outcomes. The th component is represented as
where represents the state vector, whereas and represent the system’s controller input as well as output, respectively. represent undefined continuous nonlinear functions. The unidentified continuous nonlinear function and The unidentified smooth functions and reflect the interrelated impacts that occur among th and additional components. corresponds to an undetermined consistent factor ( where constitutes a definite non-negative integer), and the symbol of is undetermined. denotes an independent standard Brownian motion specified for a complete probability space. This study assumes that just the output is accessible for analysis.
Hypothesis 2
([48]). The nonlinear mappings and , fulfill
where and represent undefined values representing the power of connections: The nonlinear smooth mappings with and
Hypothesis 3.
The control-acquired is defined as where constitutes a well-defined mapping , and denotes a non-negative factor.
In the literature, researchers [40] demonstrated the Nussbaum function condition for single-input and single-output uncertain nonlinear frameworks with undetermined control orientations. This has been employed to construct and stabilize closed-loop networks. However, the results from this study show stochastic large-scale nonlinear frameworks fail to satisfy the resulting Nussbaum function feature.
Furthermore, a novel Nussbaum function feature can be created as follows.
Theorem 3.
For and considering this specific Nussbaum gain mapping , assume that there is a smooth mapping specified on Assume a large-scale fractional-Brownian-motion complex framework (102) with a non-negative-definite radially unbounded mapping and values that meet the aforementioned inequality:
where j is characterized as an infinitesimal operator and constitutes an appropriate factor. and are all bounded on .
Proof.
Initially, we take
It is straightforward to find
which is articulated as
In view of (104), we have
Take advantage of for every and obtain
Selecting
The Caputo derivative of concerning is Therefore, we have
To demonstrate that is bounded on , we look for a contradiction. Two distinct scenarios are under consideration.
Step (1): Suppose and suppose that and hold and where is fixed. As
When we select and fulfills , it concludes that
In view of (116) and (117), as contradicting the fact that (by (115)). Consequently, has an upper bound on , and , implying that additionally has to be bounded on .
Step (2): If ∃ certain , then Applying identical interpretations utilized in Step (1), we can argue that is upper-bounded on . Consequently, it implies that is bounded on Finally, , and are also bounded on Hence, Theorem 3 has been verified. □
6.1. Uncertain Filter Technique
Consider that uncertain-logic systems possess the forms
where represents an accurate estimation of the state and
where , and represent bound compact domains for and , respectively. Furthermore, the fuzzy minimal estimation error is specified as
Hypothesis 4.
Assume that there is a vector , and represent a strict Hurwitz matrix. Then, for each positive-definite matrix a positive-definite matrix such that
To determine the unrestricted phases in systems (121) and (102), use the subsequent filtering techniques. Design the artificial-state approximation and control as
where the principal controller, is created by the OB architecture approach. The compensating controller, , is utilized to manage variability Determine the uncertainty filters as follows:
where
Create the arbitrary observation error vector as
The control system will employ the actual condition approximation outlined below:
where and represent the approximations of and , respectively.
Considering (121), (124), and (125) and after disregarding small concerns, the observer error () can be approximated as
Select the compensatory control as
In order to assess the characteristic corresponding to the uncertain-level filter (124), consider the subsequent theorem.
Theorem 4.
For the given Lyapunov function for the observer error system (127),
Ultimately, the infinitesimal generator of is
where and
Proof.
6.2. Configuration of Fractional Stochastic Adaptive-Uncertain Control
Describe a specific coordinate modification:
Select the tuning and intermediate control mechanisms outlined below:
where represents a layout factor; and Moreover, we have
Select the primary controller and adaptability principles and as follows:
The upcoming findings show that the closed-loop structures are stable and have excellent oversight effectiveness.
Theorem 5.
Proof.
Assume that the Lyapunov function can be presented as
In view of (130), the infinitesimal generator of is
where and
Theorem 3 and related references [48,52] demonstrate the fact that the closed-loop system’s outputs are bounded in probability. □
6.3. Illustrative Example
In order to verify the suggested solution, we investigate the stabilization problem of tripled reversed pendulums involving fractional Brownian motion as well as unidentified control patterns [71]. The mechanisms can be detailed below:
where , and Here, is considered as a Gaussian noise with a mean of zero and a variance of one. Thus, (143)–(145) have the following criteria of , and
We introduce the uncertain membership functions as The modeling process employs the following architectural criteria: , and
The initial settings of the system are provided as and the remaining starting points are set to zeros. Figure 11a–f illustrate the modeling findings for the trajectories of and . Figure 12a–f illustrate the modeling findings for the trajectories of main controllers and Figure 13 illustrates the modeling findings for the trajectories of compensation controllers respectively.
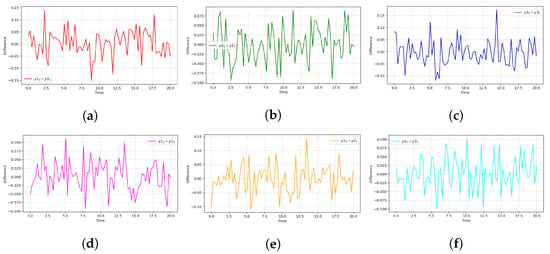
Figure 11.
Trajectories of and when fractional-order .
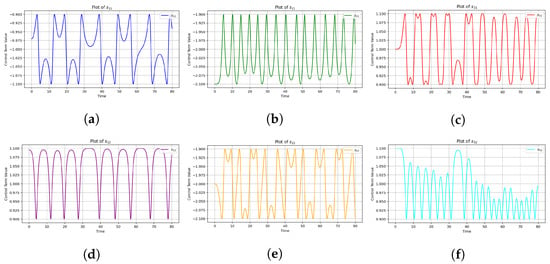
Figure 12.
Trajectories of main controllers when fractional-order .
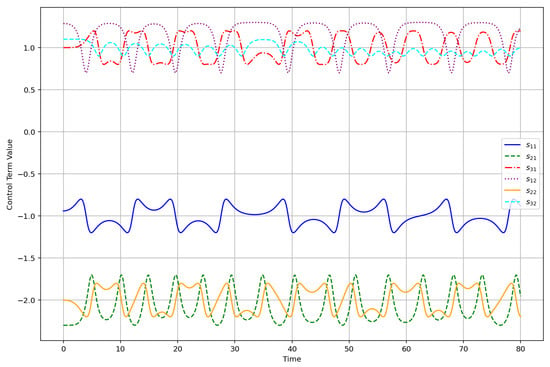
Figure 13.
Trajectories of compensation controllers when fractional-order .
In Illustrative Example 6.3, we examine the stabilization dynamics of triple-reversed pendulums influenced by fractional Brownian motion under uncertain control configurations. The governing system is characterized by fractional-order derivatives in the Caputo sense, where . The baseline fractional order is set at , and we consider variations by increasing and decreasing this value slightly.
Observations:
- When : The system exhibits faster convergence towards stabilization. The trajectories of the pendulum angles and velocities settle more quickly. This behavior is attributed to the fact that increasing makes the memory effect less dominant, rendering the system dynamics closer to an integer-order behavior (i.e., less history-dependent), which accelerates the damping of oscillations.
- When : The system response becomes slower and more oscillatory. The convergence to equilibrium takes more time, and the amplitude of fluctuations remains higher for longer durations. This reflects a stronger memory effect, typical in lower-order fractional systems, where the past states heavily influence current dynamics.
- Stochastic influence: The presence of fractional Brownian motion with Gaussian noise maintains boundedness across all values of , but the magnitude and persistence of fluctuations vary. For lower , the stochastic perturbations accumulate more persistently due to long-memory effects, whereas, for higher , they decay more rapidly.
Fractional-order serves as a tuning parameter that directly influences the rate of stabilization and robustness of the pendulum system. A careful selection of is crucial to balancing responsiveness and robustness under noisy and uncertain environments.
6.4. Remarks for Better Understanding of the Proposed Methods and Theorems
To achieve reliable and precise tracking under uncertainty, the methodology adopted in this study defines a control structure that integrates Nussbaum functions, adaptive neural–fuzzy approximators, and FON dynamics within a decentralized framework.
(i) Modeling of FON models:
FON dynamics are employed in this study due to their inherent memory and hereditary properties, which make them well-suited for modeling complex physical phenomena characterized by long-term dependencies and filtering effects. Compared to classical integer-order systems, FON models provide a more accurate and flexible representation of nonlinear dynamics.
(ii) The OB technique’s function:
The proposed OB approach, unlike conventional backstepping, introduces a framework that not only ensures system stability but also optimizes control performance. This is achieved by integrating Nussbaum-type functions with adaptive neural networks, allowing the controller to adjust rapidly in response to environmental uncertainties.
(iii) Nussbaum-type function interpretation:
To address the challenge of uncertain control directions, a Nussbaum-type function is introduced. It enhances the system’s robustness by enabling the control law to adapt even when the sign or direction of the control gain is unknown or varying. This eliminates the need for precise prior knowledge of the control input characteristics.
(iv) Objective of the quartic-barrier Lyapunov function:
The quartic-barrier Lyapunov function is employed to ensure that the tracking error remains within a predefined accuracy bound within a finite time. By enforcing a constraint that prevents the error from exceeding this bound, the function guarantees both transient and steady-state performance.
(v) Insight into the theorem proofs:
The proofs are constructed using the fractional Lyapunov direct method, combined with adaptive laws derived from neural networks and fuzzy approximators. By developing Lyapunov functions that incorporate both fractional derivatives and stochastic disturbances, the proofs demonstrate that all closed-loop signals are uniformly ultimately bounded in probability.
(vi) Design of observers and auxiliary signals:
In accordance with the ISpS framework, an auxiliary signal is designed to manage unmeasured states and external disturbances. To estimate these unobservable states, a fuzzy-phase observer is incorporated, which is crucial for practical applications in networks with limited sensors.
(vii) Significance of decentralized control architecture:
A decentralized control architecture plays a vital role in large-scale systems composed of interconnected subsystems. While each subsystem controller is designed independently, adaptive laws are employed to compensate for uncertainties in the interaction dynamics. This approach enhances scalability and eliminates the need for centralized computation.
(viii) Novelty and comparison with existing work:
The proposed approach distinguishes itself from current FON and neuro-adaptive-control methods by integrating several advanced features within a unified decentralized architecture. Unlike previous methods, this work enhances system modeling and control accuracy by combining neural and fuzzy approximators with FON dynamics. Additionally, it employs Nussbaum functions to effectively handle unknown control directions and incorporates predefined performance constraints to guarantee precise tracking. The method also addresses stochastic robustness, ensuring reliable performance in the presence of uncertainties. To the best of our knowledge, the existing literature has not thoroughly explored such a comprehensive integration of these components in a decentralized framework.
7. Conclusions
In this research, we examined fractional-order adaptive NN-optimized control for the predetermined time and precision tracking challenge in SF structures with undetermined controlling orientations. The suggested fractional-order control approach ensures that tracking data tends to a predetermined precision within a specified time frame. Furthermore, the controlling device requires the least controlling capabilities. In order to accomplish the controlling goal, a Nussbaum-type function and a new time-dependent fractional-order functional were proposed to address the control orientation undetermined and predetermined execution shortcomings, respectively. In addition, we addressed the adaptive decentralized uncertain feedback regarding output stabilization issues encountered in unpredictable fractional stochastic complex large-scale systems using stringent control. The probabilistic nonlinear structures under consideration lack specified nonlinear functions, controlling paths, and state observations. The deterministic–stochastic fractional-order nonlinear structures under consideration lack specified nonlinear functions, controlling paths, and state observations. The fuzzy reasoning algorithms revealed unidentified fractional complex processes, while a fuzzy phase filtration observer estimated the unrecorded events. Using the optimized backstepping fractional-order architecture approach and the Nussbaum-type function, an efficient adaptation-based decentralized uncertain-feedback regulation strategy was devised. The closed-loop application system’s robustness was demonstrated. Finally, the suggested approach was validated using multiple sets of scenarios at distinct predetermined times. We plan to apply the findings to various structures, including non-SF and multiple-input, multiple-output systems. Also, the adaptive-control technique solves both state-related unrecorded and unidentified control orientation problems for probabilistic exponential large-scale mechanisms, providing significant improvements.
- Drawbacks:
The proposed approach shows significant progress but has several limitations. Its integration of Nussbaum functions, fractional-order dynamics, and neural–fuzzy approximators increases computational complexity, which may hinder real-time use on limited hardware. The method requires careful tuning of many parameters, and improper choices can reduce accuracy and reliability. Although it addresses stochastic robustness, its performance under varying, especially high-level, noise still requires thorough experimental validation. Lastly, while the decentralized design enhances scalability, complex interconnections and communication delays in large systems may restrict implementation. Addressing these challenges is crucial for broader application.
Author Contributions
A.G.A. provided the supervision, resources, writing—original draft preparation, project administration, methodology, and investigation, and T.A. provided funding acquisition, formal analysis, data curation, conceptualization, writing—review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported and funded by the Deanship of Scientific Research at Imam Mohammad Ibn Saud Islamic University (IMSIU) (grant number IMSIU-DDRSP2504).
Data Availability Statement
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.
Conflicts of Interest
The authors declare that they have no conflicts of interest.
References
- Liu, H.; Pan, Y.; Cao, J.; Wang, H.; Zhou, Y. Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5166–5177. [Google Scholar] [CrossRef] [PubMed]
- Zhan, Y.; Tong, S. Adaptive fuzzy output-feedback decentralized control for fractional-order nonlinear large-scale systems. IEEE Trans. Cybern. 2021, 52, 12795–12804. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Zhang, H.; Shi, Z.; Gao, Z. Neural-Network-Based Finite-Time Bipartite Containment Control for Fractional-Order Multi-Agent Systems. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 7418–7429. [Google Scholar] [CrossRef]
- Dhanalakshmi, P.; Senpagam, S.; Mohanapriya, R. Finite-time fuzzy reliable controller design for fractional-order tumor system under chemotherapy. Fuzzy Sets Syst. 2022, 432, 168–181. [Google Scholar] [CrossRef]
- Chu, Y.-M.; Alzahrani, T.; Rashid, S.; Rashidah, W.; Rehman, S.; Alkhatib, M. An advanced approach for the electrical responses of discrete fractional-order biophysical neural network models and their dynamical responses. Sci. Rep. 2023, 13, 18180. [Google Scholar] [CrossRef]
- Alzahrani, T.; Rashid, S. Unlocking the potential of secure communications: A comprehensive systematic review of the network design model for topology control and routing synergy in wireless sensor networks for prolonged longevity. Results Eng. 2025, 25, 104450. [Google Scholar] [CrossRef]
- Rashid, S.; Ali, I.; Sultana, S.; Zia, Z.; Elagan, S.K. Understanding perspectives for mixed mode oscillations of the fractional neural network approaches to the analysis of neurophysiological data from the perspective of the observability of complex networks. Heliyon 2024, 10, e40659. [Google Scholar] [CrossRef]
- Rashid, S.; Shafique, R.; Akram, S.; Elagan, S.K. New computations of the fractional worms transmission model in wireless sensor network in view of new integral transform with statistical analysis; an analysis of information and communication technologies. Heliyon 2024, 10, e35955. [Google Scholar] [CrossRef]
- Chu, Y.M.; Rashid, S.; Alzahrani, T.; Alhulayyil, H.; Alsagri, H.; Rehman, S.U. Complex adaptive learning cortical neural network systems for solving time-fractional difference equations with bursting and mixed-mode oscillation behaviours. Sci. Rep. 2023, 13, 22447. [Google Scholar] [CrossRef]
- Wang, C.; Cui, L.; Liang, M.; Li, J.; Wang, Y. Adaptive Neural Network Control for a Class of Fractional-Order Nonstrict-Feedback Nonlinear SystemsWith Full-State Constraints and Input Saturation. IEEE Trans. Neural Netw. Learn. Syst 2021, 33, 6677–6689. [Google Scholar] [CrossRef]
- Zouari, F.; Ibeas, A.; Boulkroune, A.; Cao, J.; Arefi, M.M. Adaptive neural output-feedback control for nonstrict-feedback time-delay fractional-order systems with output constraints and actuator nonlinearities. Neural Netw. 2018, 105, 256–276. [Google Scholar] [CrossRef] [PubMed]
- Shahvali, M.; Azarbahram, A.; Naghibi-Sistani, M.B.; Askari, J. Bipartite consensus control for fractional-order nonlinear multi-agent systems: An output constraint approach. Neurocomputing 2020, 397, 212–223. [Google Scholar] [CrossRef]
- Zouari, F.; Ibeas, A.; Boulkroune, A.; Jinde, C.; Arefi, M.M. Neural network controller design for fractional-order systems with input nonlinearities and asymmetric time-varying Pseudo-state constraints. Chaos Solitons Fractals 2021, 144, 110742. [Google Scholar] [CrossRef]
- Pontryagin, L.S.; Boltyanskii, V.G.; Gamkrelidze, R.V.; Mishchenko, E.F. The Mathematical Theory of Optimal Processes; Intersci.: Boca Raton, FL, USA, 1962. [Google Scholar]
- Lewis, F.L.; Vrabie, D.; Syrmos, V.L. Optimal Control, 3rd ed.; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Wen, G.; Ge, S.S.; Tu, F. Optimized backstepping for tracking control of strict-feedback systems. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 3850–3862. [Google Scholar] [CrossRef]
- Wen, G.; Chen, C.P.; Ge, S.S. Simplified optimized backstepping control for a class of nonlinear strict-feedback systems with unknown dynamic functions. IEEE Trans. Cybern. 2020, 51, 4567–4580. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Zhu, Q.; Wen, G. Adaptive tracking control for perturbed strict-feedback nonlinear systems based on optimized backstepping technique. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 853–865. [Google Scholar] [CrossRef]
- Li, Y.; Fan, Y.; Li, K.; Liu, W.; Tong, S. Adaptive optimized backstepping control-based RL algorithm for stochastic nonlinear systems with state constraints and its application. IEEE Trans. Cybern. 2021, 52, 10542–10555. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Y.; Tong, S. Observer-based neuro-adaptive optimized control of strict-feedback nonlinear systems with state constraints. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Li, K.; Li, Y. Output-feedback based simplified optimized backstepping control for strict-feedback systems with input and state constraints. IEEE/CAA J. Autom. Sin. 2021, 8, 1119–1132. [Google Scholar] [CrossRef]
- Chen, M.; Ge, S.S.; Ren, B.B. Robust adaptive neural network control for a class of uncertain MIMO nonlinear systems with input nonlinearities. IEEE Trans. Neural Netw. 2010, 21, 796–812. [Google Scholar] [CrossRef]
- Wu, J.; Li, J. Adaptive fuzzy control for perturbed strict-feedback nonlinear systems with predefined tracking accuracy. Nonlinear Dyn. 2016, 83, 1185–1197. [Google Scholar] [CrossRef]
- Chen, W.; Ge, S.S.; Wu, J.; Gong, M. Globally stable adaptive backstepping neural network control for uncertain strict-feedback systems with tracking accuracy known a priori. IEEE Trans. Neural Netw. Learn. Syst. 2014, 26, 1842–1854. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Krstic, M. Prescribed-time output-feedback control of stochastic nonlinear systems. IEEE Trans. Automat. Control 2022, 68, 1431–1446. [Google Scholar] [CrossRef]
- Zhou, S.; Wang, X.; Song, Y. Prescribed performance tracking control under uncertain initial conditions: A neuroadaptive output feedback approach. IEEE Trans. Cybern. 2022, 53, 7213–7223. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Yang, G.-H. Low-complexity tracking control of strict-feedback systems with unknown control directions. IEEE Trans. Automat. Cont. 2019, 64, 5175–5182. [Google Scholar] [CrossRef]
- Ma, H.; Liang, H.; Zhou, Q.; Ahn, C.K. Adaptive dynamic surface control design for uncertain nonlinear strict-feedback systems with unknown control direction and disturbances. IEEE Trans. Syst. Man Cybern. 2018, 49, 506–515. [Google Scholar] [CrossRef]
- Deng, X.; Zhang, C.; Ge, Y. Adaptive neural network dynamic surface control of uncertain strict-feedback nonlinear systems with unknown control direction and unknown actuator fault. J. Frankl. Inst. B 2022, 359, 4054–4073. [Google Scholar] [CrossRef]
- Xia, J.; Zhang, J.; Feng, J.; Wang, Z.; Zhuang, G. Command filter-based adaptive fuzzy control for nonlinear systems with unknown control directions. IEEE Trans. Syst. Man Cybern. 2019, 51, 1945–1953. [Google Scholar] [CrossRef]
- Wu, J.; Sun, Y.; Zhao, Q. Adaptive asymptotic control of stochastic systems with state delay and unknown control directions. IEEE Trans. Circuits Syst. II 2021, 69, 174–178. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, H. Adaptive fuzzy tracking control of nonlinear switched stochastic systems with prescribed performance and unknown control directions. IEEE Trans. Syst. Man Cybern. 2017, 50, 590–599. [Google Scholar] [CrossRef]
- Zhang, H.B.; Dang, C.Y.; Li, C.G. Decentralized H∞ filter design for discrete-time interconnected fuzzy systems. IEEE Trans. Fuzzy Syst. 2009, 17, 1428–1440. [Google Scholar] [CrossRef]
- Zhang, H.B.; Feng, G. Stability analysis and H∞ controller design of discrete-time fuzzy large-scale systems based on piecewise Lyapunov functions. IEEE Trans. Syst. 2008, 38, 1390–1401. [Google Scholar]
- Chen, W.H.; Chen, B.S. Robust filter for linear stochastic partial differential systems via a set of sensor measurements. IEEE Trans.Circuit Syst. Part I Reg. Pap. 2012, 59, 1251–1264. [Google Scholar] [CrossRef]
- Shi, P.; Xia, Y.; Liu, G.; Rees, D. On designing of sliding-mode control for stochastic jump systems. IEEE Trans. Autom. Control 2006, 51, 97–103. [Google Scholar] [CrossRef]
- Wu, L.; Yang, X.Z.; Lam, H.K. Dissipativity analysis and synthesis for discrete-time T-S fuzzy stochastic systems with time-varying delay. IEEE Trans. Fuzzy Syst. 2013. [Google Scholar] [CrossRef]
- Pan, Z.; Basar, T. Adaptive controller design for tracking and disturbance attenuation in parametric strict-feedback nonlinear systems. IEEE Trans. Autom. Control 1998, 43, 1066–1083. [Google Scholar] [CrossRef]
- Wu, Z.J.; Xie, X.J.; Zhang, S.Y. Adaptive backstepping controller design using stochastic small-gain theorem. Automatica 2007, 43, 608–620. [Google Scholar] [CrossRef]
- Liu, S.J.; Zhang, J.F.; Jiang, Z.P. Decentralized adaptive outputfeedback stabilization for large-scale stochastic nonlinear systems. Automatica 2007, 43, 238–251. [Google Scholar] [CrossRef]
- Fan, H.J.; Han, L.X.; Wen, C.Y.; Xu, L. Decentralized adaptive output-feedback controller design for stochastic nonlinear interconnected systems. Automatica 2012, 48, 2866–2873. [Google Scholar] [CrossRef]
- Phan, V.D.; Nguyen, X.H.; Dinh, V.N.; Dang, T.S.; Le, V.C.; Ho, S.P.; Ta, H.C.; Duong, D.T.; Mai, T.A. Development of an Adaptive Fuzzy-Neural Controller for Temperature Control in a Brick Tunnel kiln. Electronics 2024, 13, 342. [Google Scholar] [CrossRef]
- Yao, Z.; Yao, J.; Yao, F.; Xu, Q.; Xu, M.; Deng, W. Model reference adaptive tracking control for hydraulic servo systems with nonlinear neural-networks. ISA Trans. 2020, 100, 396–404. [Google Scholar] [CrossRef]
- Wang, H.Q.; Chen, B.; Lin, C. Direct adaptive neural control for strict-feedback stochastic nonlinear systems. Nonlinear Dyn. 2012, 67, 2703–2718. [Google Scholar] [CrossRef]
- Wang, H.Q.; Chen, B.; Liu, X.P.; Liu, K.F.; Lin, C. Robust adaptive fuzzy tracking control for pure-feedback stochastic nonlinear systemswith input constraints. IEEE Trans. Cybern. 2013, 43, 2093–2104. [Google Scholar] [CrossRef] [PubMed]
- Tong, S.C.; Wang, T.; Li, Y.M.; Chen, B. A combined backstepping and stochastic small-gain approach to robust adaptive fuzzy output feedback control, IEEE Trans. Fuzzy Syst. 2013, 21, 314–327. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.M.; Tong, S.C. Adaptive fuzzy decentralized output feedback control for stochastic nonlinear large-scale systems. Neurocomputing 2012, 83, 38–46. [Google Scholar] [CrossRef]
- Zhang, T.P.; Ge, S.S. Adaptive neural network tracking control of MIMO nonlinear systems with unknown dead zones and control directions. IEEE Trans. Neural Net. 2009, 20, 483–493. [Google Scholar] [CrossRef]
- Wang, Y.C.; Zhang, H.G.; Wang, Y.Z. Fuzzy adaptive control of stochastic nonlinear systems with unknown virtual control gain function. ACTA Autom. Sin. 2006, 32, 170–178. [Google Scholar]
- Yu, Z.X.; Jin, Z.H.; Du, H.B. Adaptive neural control for a class of non-affine stochastic non-linear systems with time-varying delay: A Razumikhin-Nussbaum method. IET Control Theory Appl. 2012, 6, 14–23. [Google Scholar] [CrossRef]
- Yu, Z.X.; Li, S.G.; Du, H.B. Razumikhin-Nussbaum-lemma-based adaptive neural control for uncertain stochastic pure-feedback nonlinear systems with time-varying delays. Int. J. Robust Nonlinear Control 2013, 23, 1214–1239. [Google Scholar] [CrossRef]
- Tong, S.C.; Li, Y.M. Adaptive fuzzy output feedback control of MIMO nonlinear systems with unknown dead-zone inputs. IEEE Trans. Fuzzy Syst. 2013, 21, 134–146. [Google Scholar] [CrossRef]
- Geng, W.T.; Lin, C.; Chen, B. Observer-based stabilizing control for fractional-order systems with input delay. ISA Trans. 2020, 100, 103–108. [Google Scholar] [CrossRef] [PubMed]
- Keighobadi, J.; Pahnehkolaei, S.M.A.; Alfi, A.; Machado, J. Command-filtered compound FAT learning control of fractional-order nonlinear systems with input delay and external disturbances. Nonlinear Dyn. 2022, 108, 293–313. [Google Scholar] [CrossRef]
- Zirkohi, M.M. Robust adaptive backstepping control of uncertain fractional-order nonlinear systems with input time delay. Math. Comput. Simul. 2022, 196, 251–272. [Google Scholar] [CrossRef]
- Liu, S.; Wang, H.; Li, T. Adaptive composite dynamic surface neural control for nonlinear fractional-order systems subject to delayed input. ISA Trans. 2022, 134, 122–133. [Google Scholar] [CrossRef] [PubMed]
- Jian, W.; Wang, W.; Ding, S.; Xie, X.; Yi, Y. Adaptive neural optimized control for uncertain strict-feedback systems with unknown control directions and pre-set performance. Commun. Nonlinear Sci. Numer. Simul. 2023, 126, 107506. [Google Scholar]
- Wang, Q.; Cao, J.; Liu, H. Adaptive fuzzy control of nonlinear systems with predefined time and accuracy. IEEE Trans. Fuzzy Syst. 2022, 30, 5152–5165. [Google Scholar] [CrossRef]
- Ma, L.; Zong, G.; Zhao, X.; Huo, X. Observed-based adaptive finite-time tracking control for a class of nonstrict-feedback nonlinear systemswith input saturation. J. Frankl. Inst. 2020, 357, 11518–11544. [Google Scholar] [CrossRef]
- Liang, H.; Liu, G.; Zhang, H.; Huang, T. Neural-network-based event-triggered adaptive control of nonaffine nonlinear multiagent systems with dynamic uncertainties. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 2239–2250. [Google Scholar] [CrossRef]
- Podlubny, I. Fractiorlal Differential Eqnations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Jiang, Z.P.; Praly, L. Preliminary results about robust lagrange stability in adaptive non-linear regulation. Int. J. Adapt. Control Signal Process. 1992, 6, 285–307. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, H.; Jiang, B. Fault estimation and accommodation of fractional-order nonlinear, switched, and interconnected systems. IEEE Trans. Cyber. 2020, 52, 1443–1453. [Google Scholar] [CrossRef]
- Mitrinović, D.S.; Pečarić, J.E.; Fink, A.M. Classical and New Inequalities in Analysis; Kluwer Academic Publishers: London, UK, 1993. [Google Scholar]
- Diethelm, K. The Analysis of Fractional Differential Equations; Springer-Verlag GmbH: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Tong, S.; Sui, S.; Li, Y. Adaptive fuzzy decentralized output stabilization for stochastic nonlinear large-scale systems with unknown control directions. IEEE Trans. Fuzzy Syst. 2013, 22, 1365–1372. [Google Scholar] [CrossRef]
- Cheng, J.; Liang, L.; Park, J.H.; Yan, H.; Li, K. A dynamic event-triggered approach to state estimation for switched memristive neural networks with nonhomogeneous sojourn probabilities. IEEE Trans Circuits Syst. I Regul. Pap. 2021, 68, 4924–4934. [Google Scholar] [CrossRef]
- Xia, J.; Lian, Y.; Su, S.F.; Shen, H.; Chen, G. Observer-based event-triggered adaptive fuzzy control for unmeasured stochastic nonlinear systems with unknown control directions. IEEE Trans. Cybern. 2022, 52, 10655–11066. [Google Scholar] [CrossRef]
- Selmic, R.R.; Lewis, F.L. Deadzone compensation in motion control systems using neural networks. IEEE Trans. Autom. Control 2000, 45, 602–613. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, H.; Wang, Y.; Ren, H.; Li, Q. Adaptive fuzzy prescribed finite-time tracking control for nonlinear system with unknown control directions. IEEE Trans Fuzzy Syst. 2022, 30, 1993–2003. [Google Scholar] [CrossRef]
- Yoo, S.J.; Park, J.B.; Choi, Y.H. Decentralized adaptive stabilization of interconnected nonlinear systems with unknown non-symmetric deadzone inputs. Automatica 2009, 45, 436–443. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).