

Stat-Space Approach to Three-Dimensional Thermoelastic Half-Space Based on Fractional Order Heat Conduction and Variable Thermal Conductivity Under Moor–Gibson–Thompson Theorem


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Governing Equations
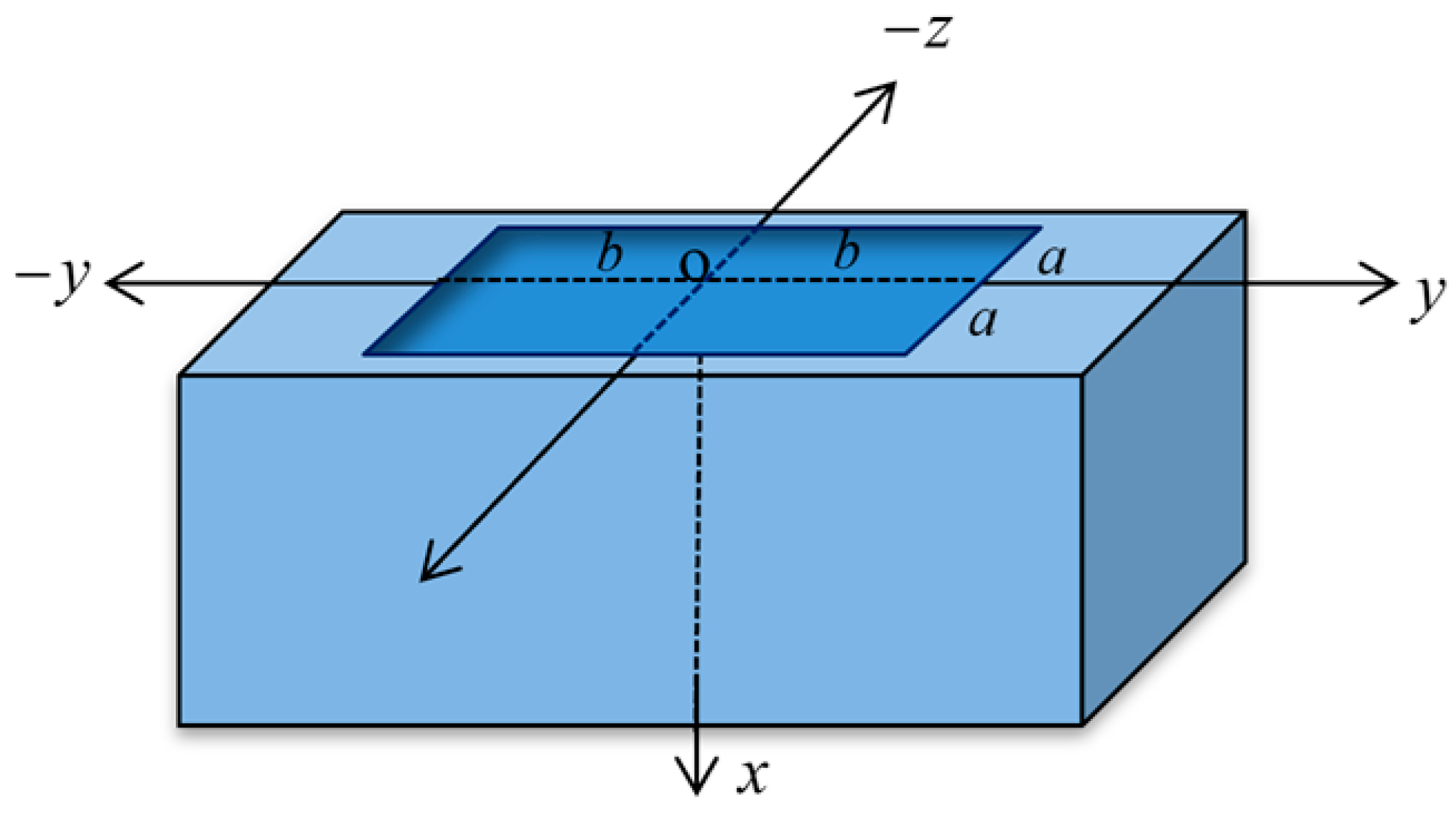
3. The Problem Formulation
4. Applying the Laplace and Double Fourier Transforms
5. Formulation of the State-Space Approach
6. Inversion of the Laplace and the Double Fourier Transforms
7. Numerical Results and Discussion
8. Conclusions
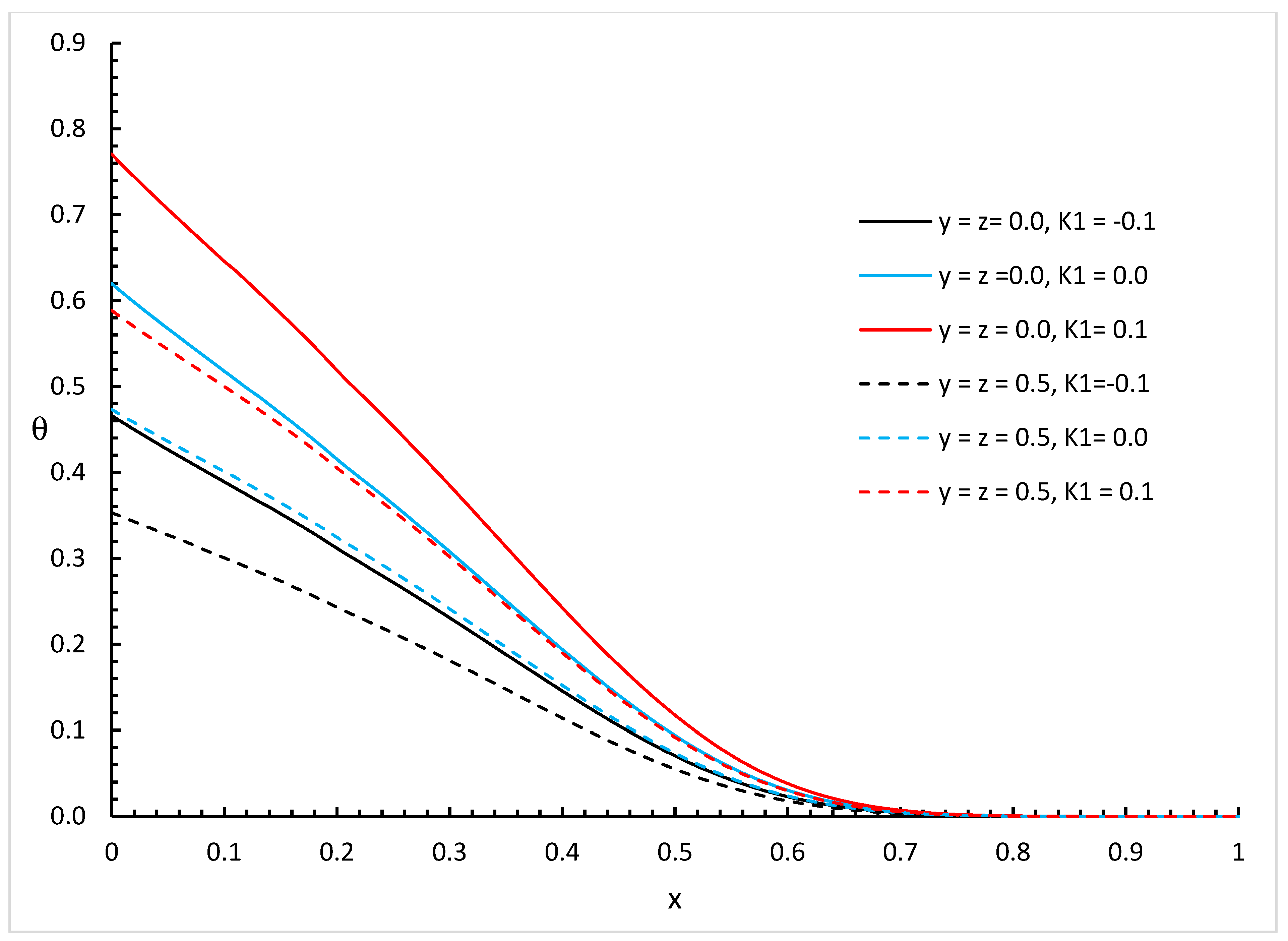
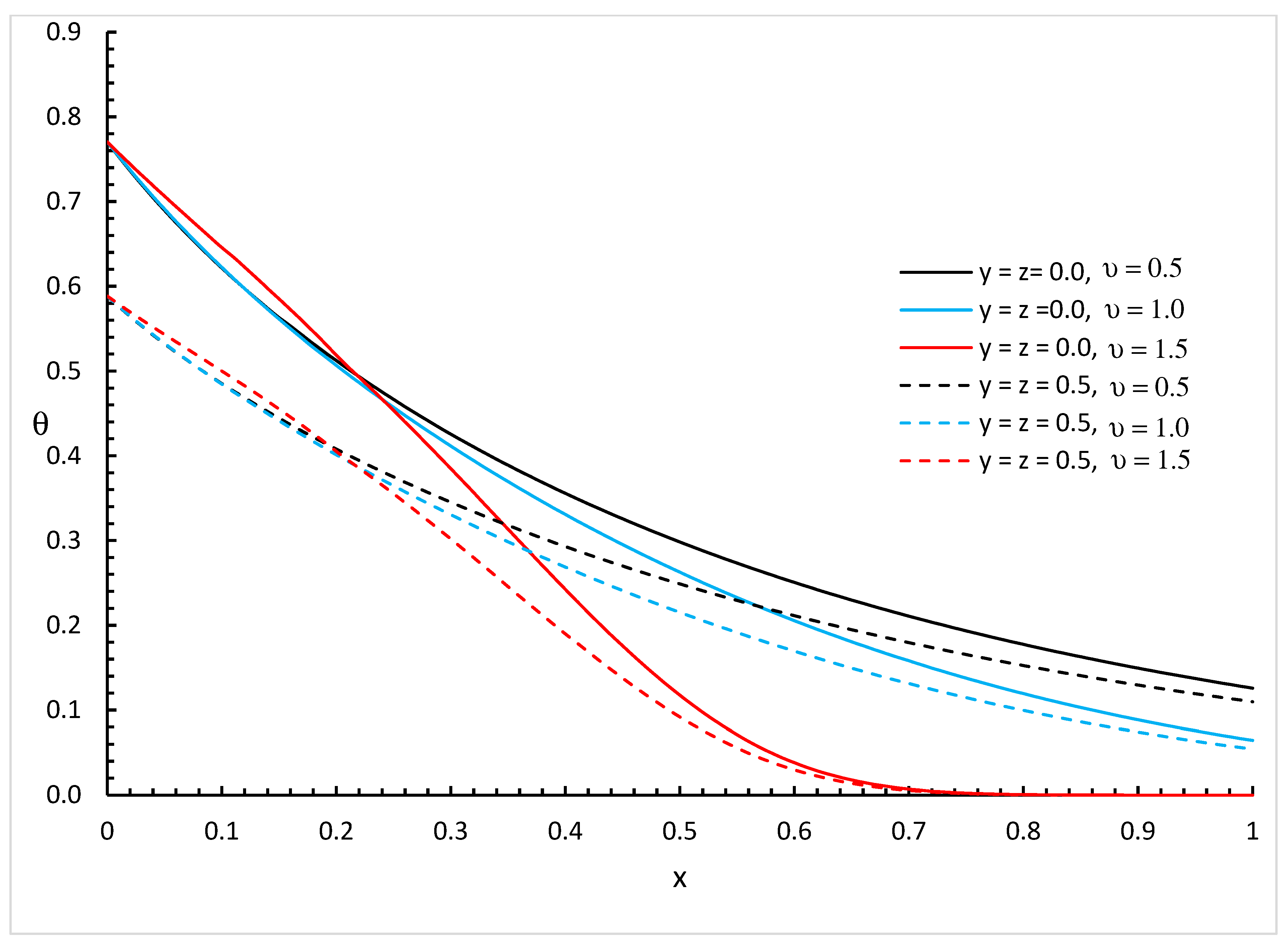
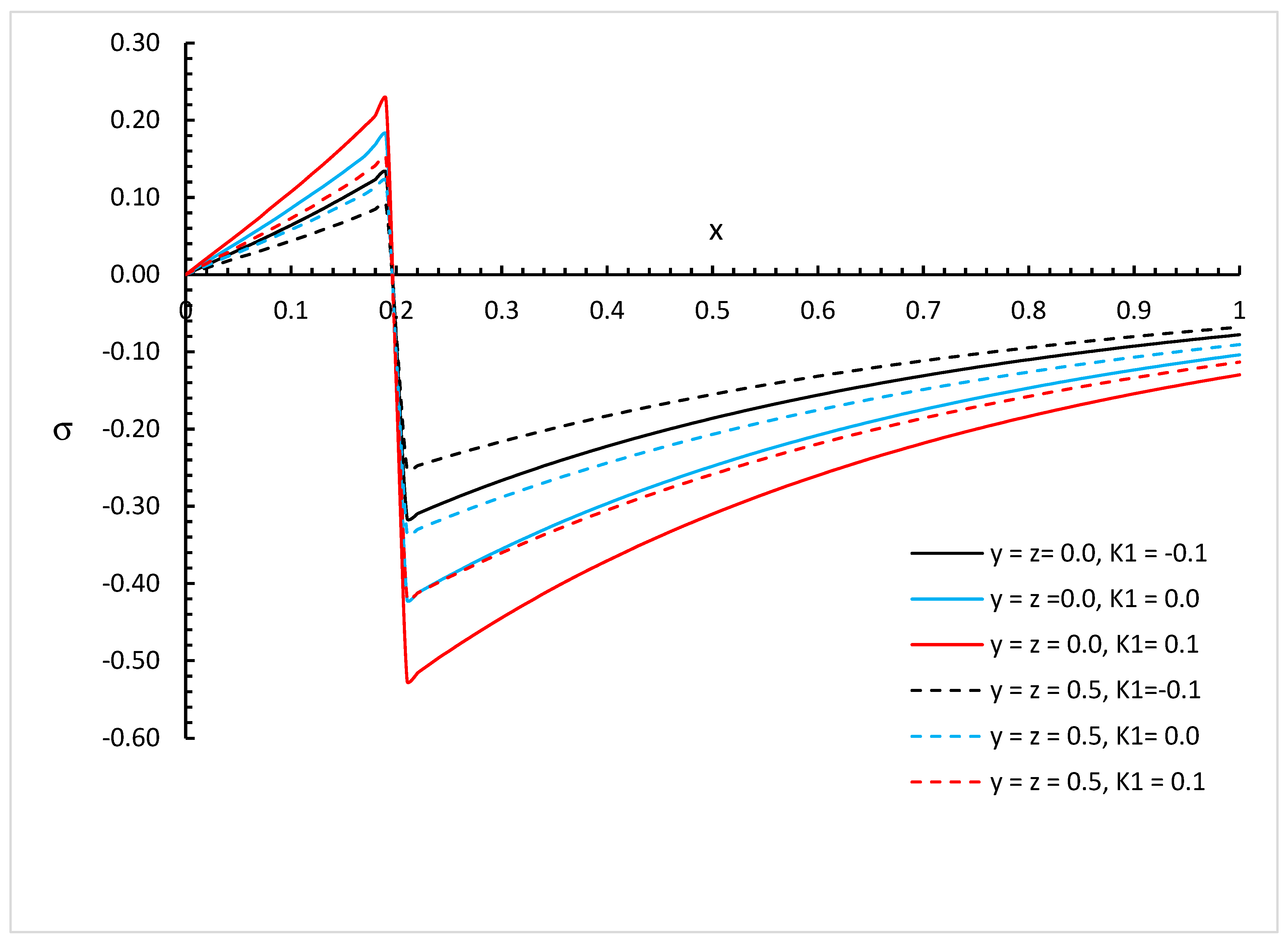
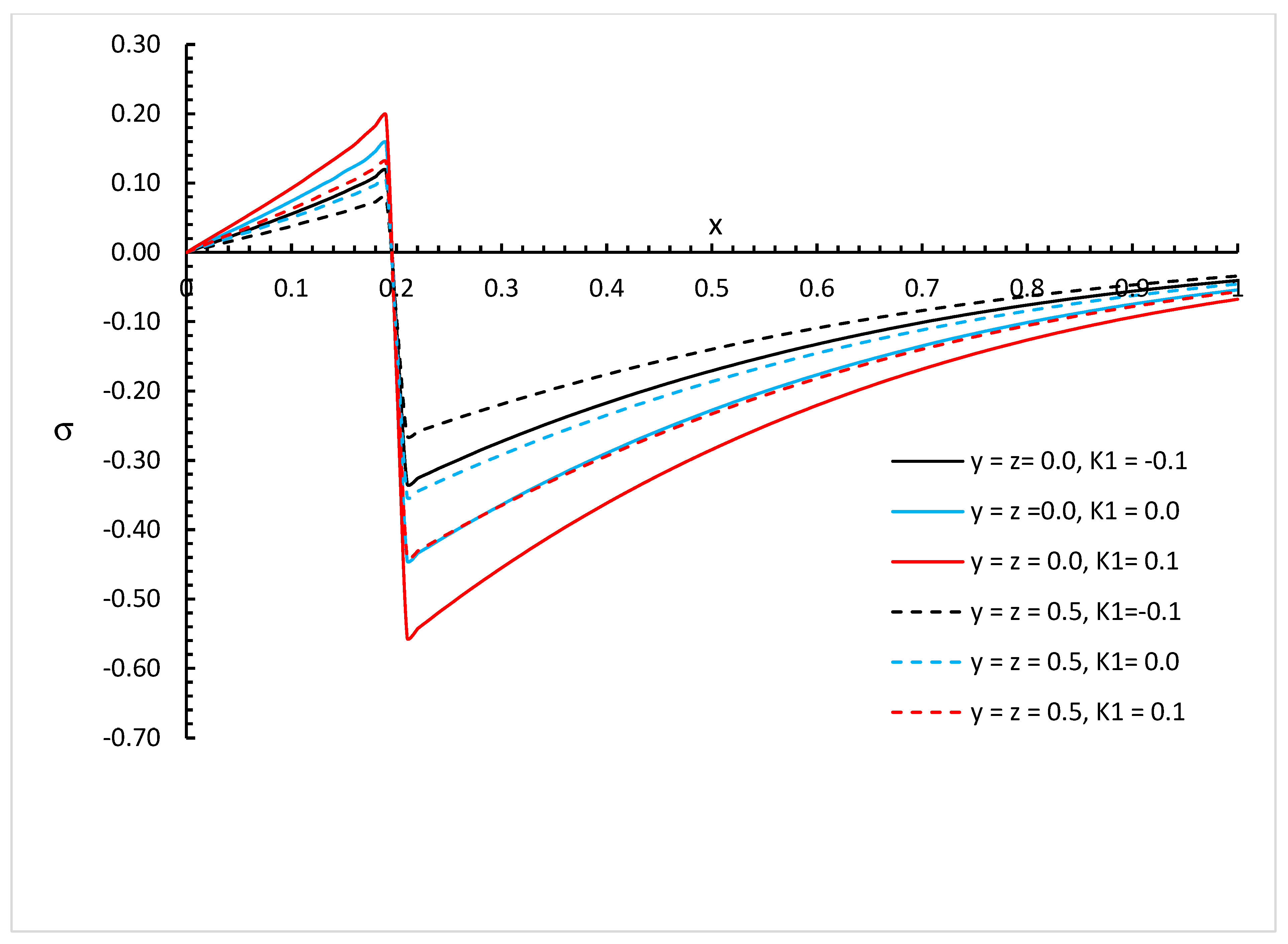
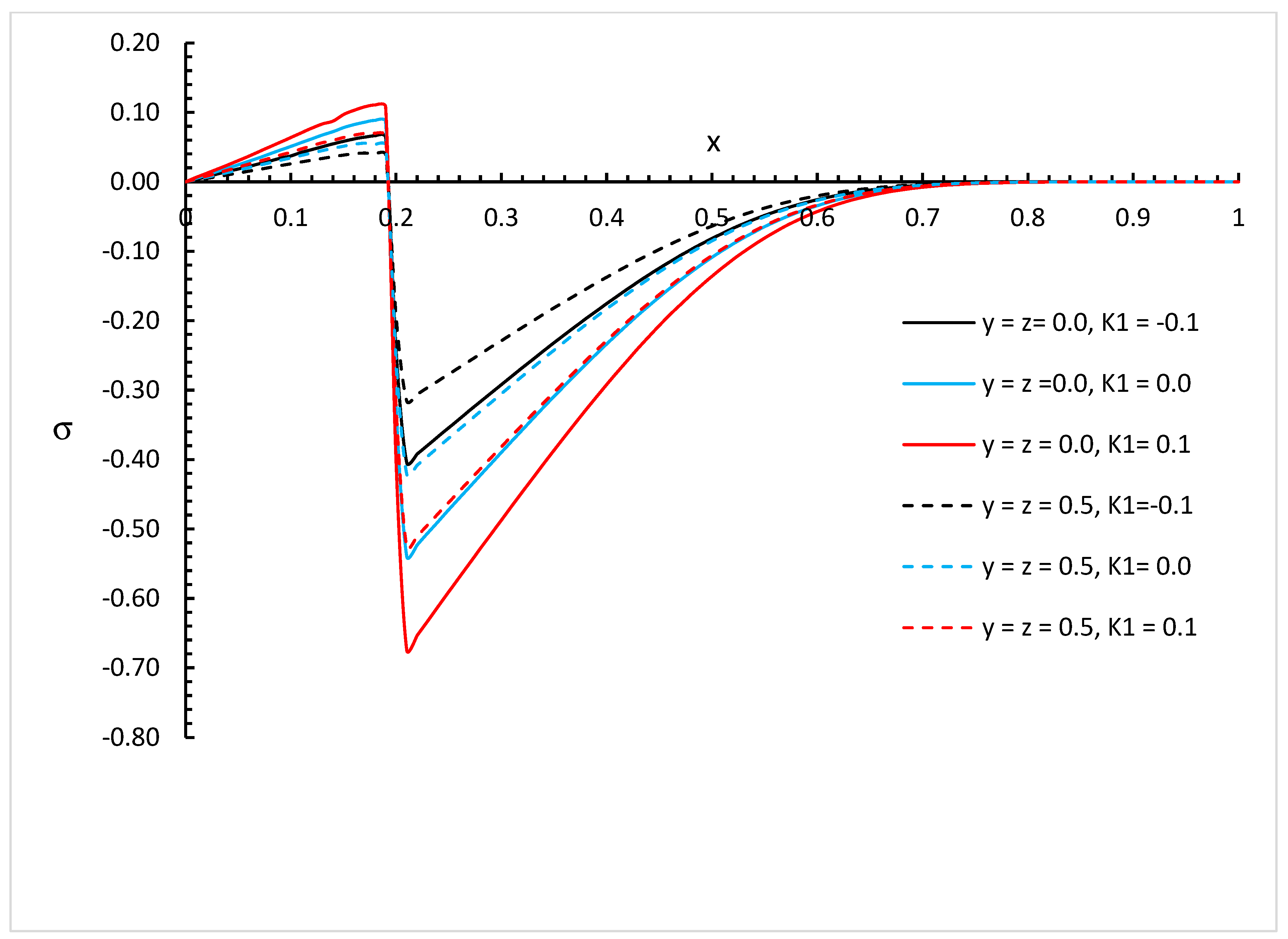
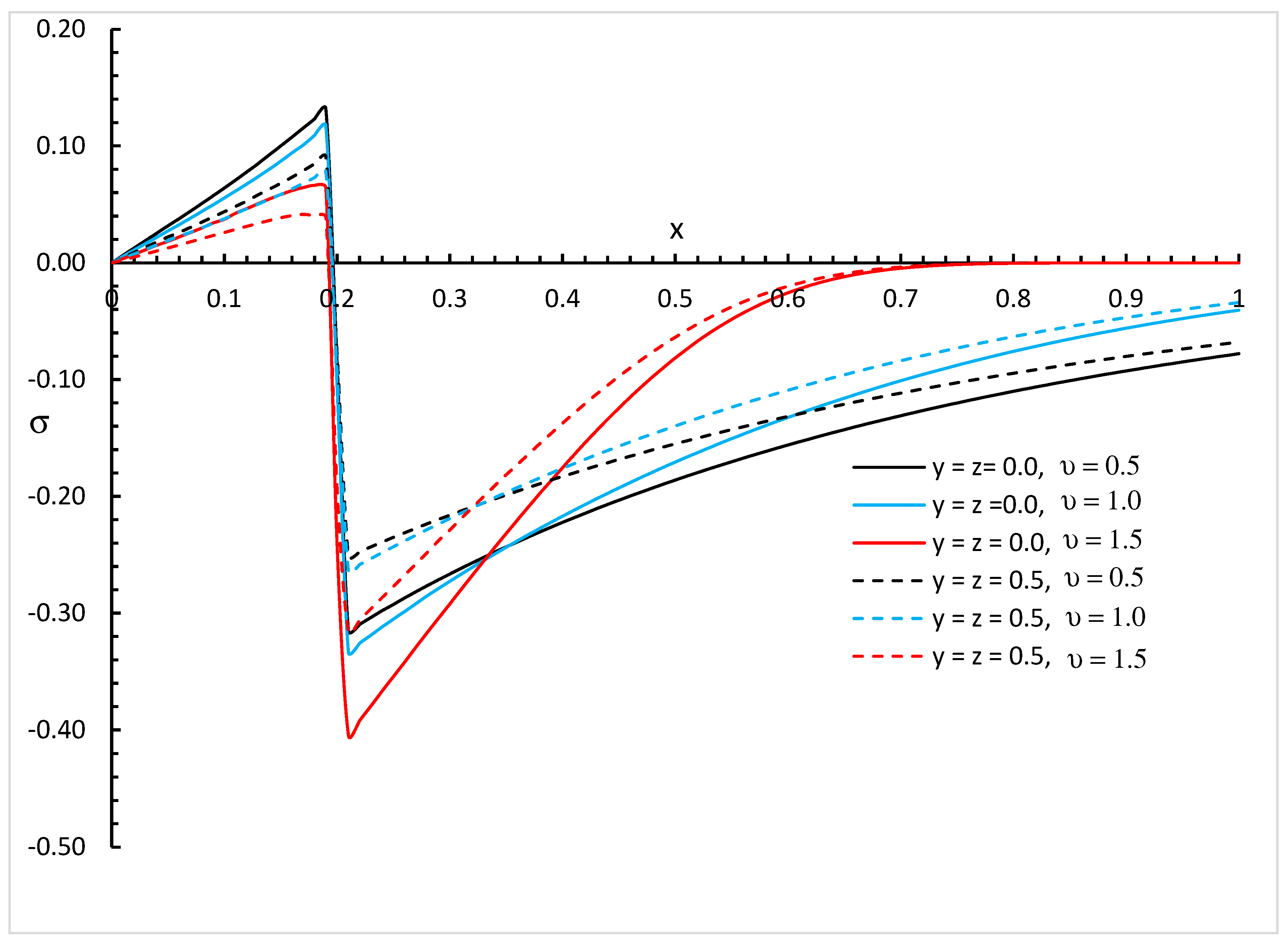
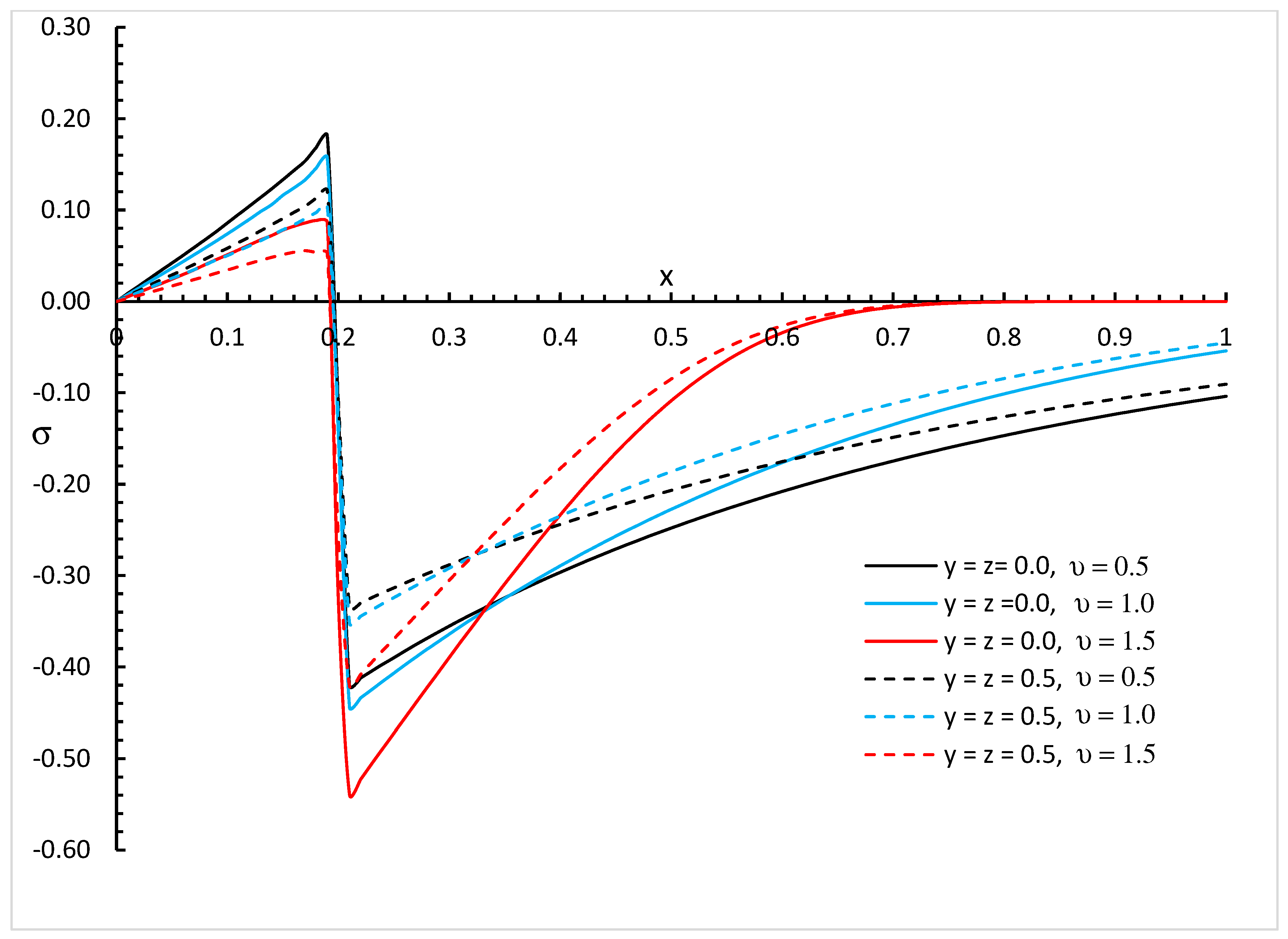
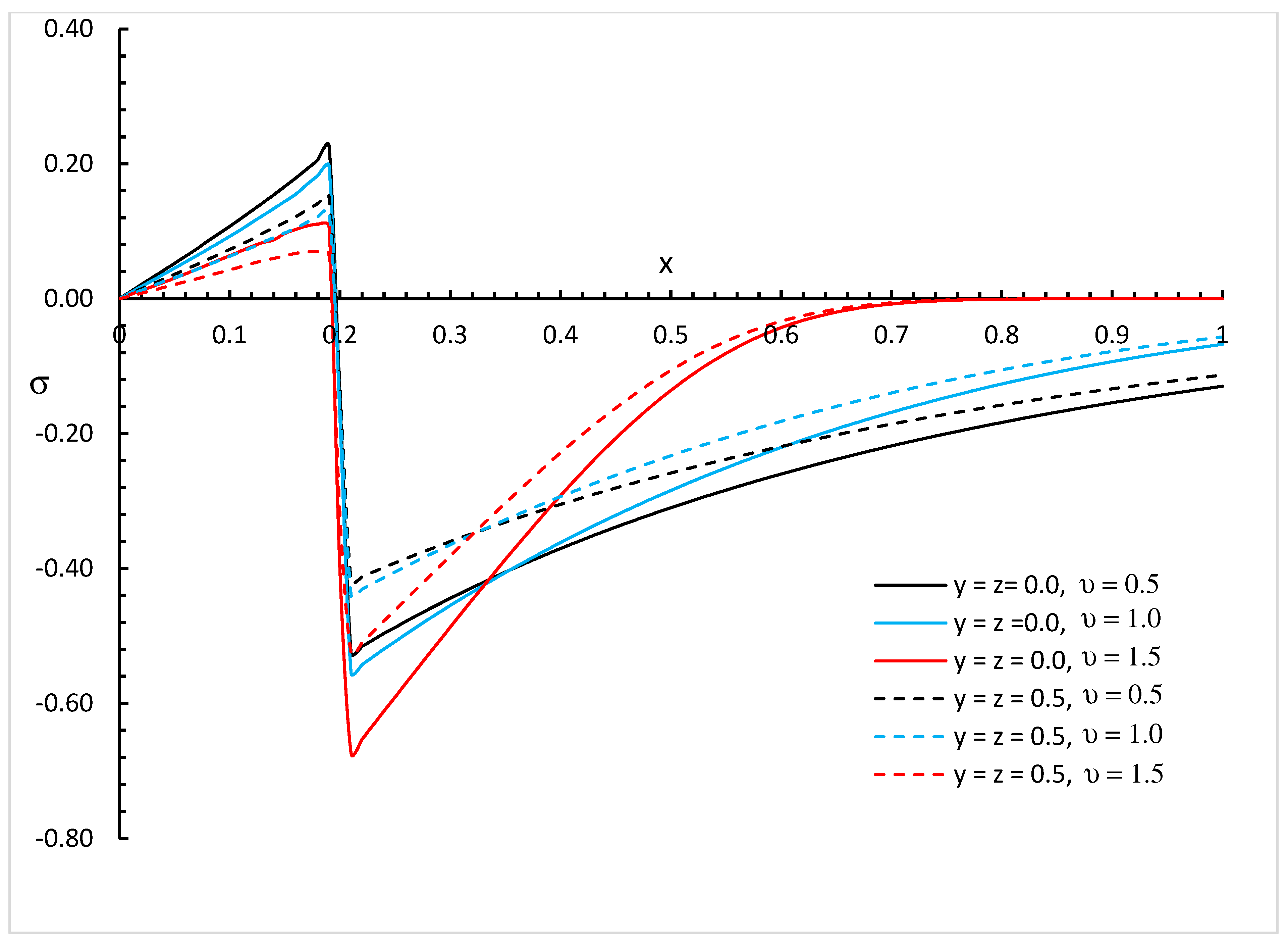
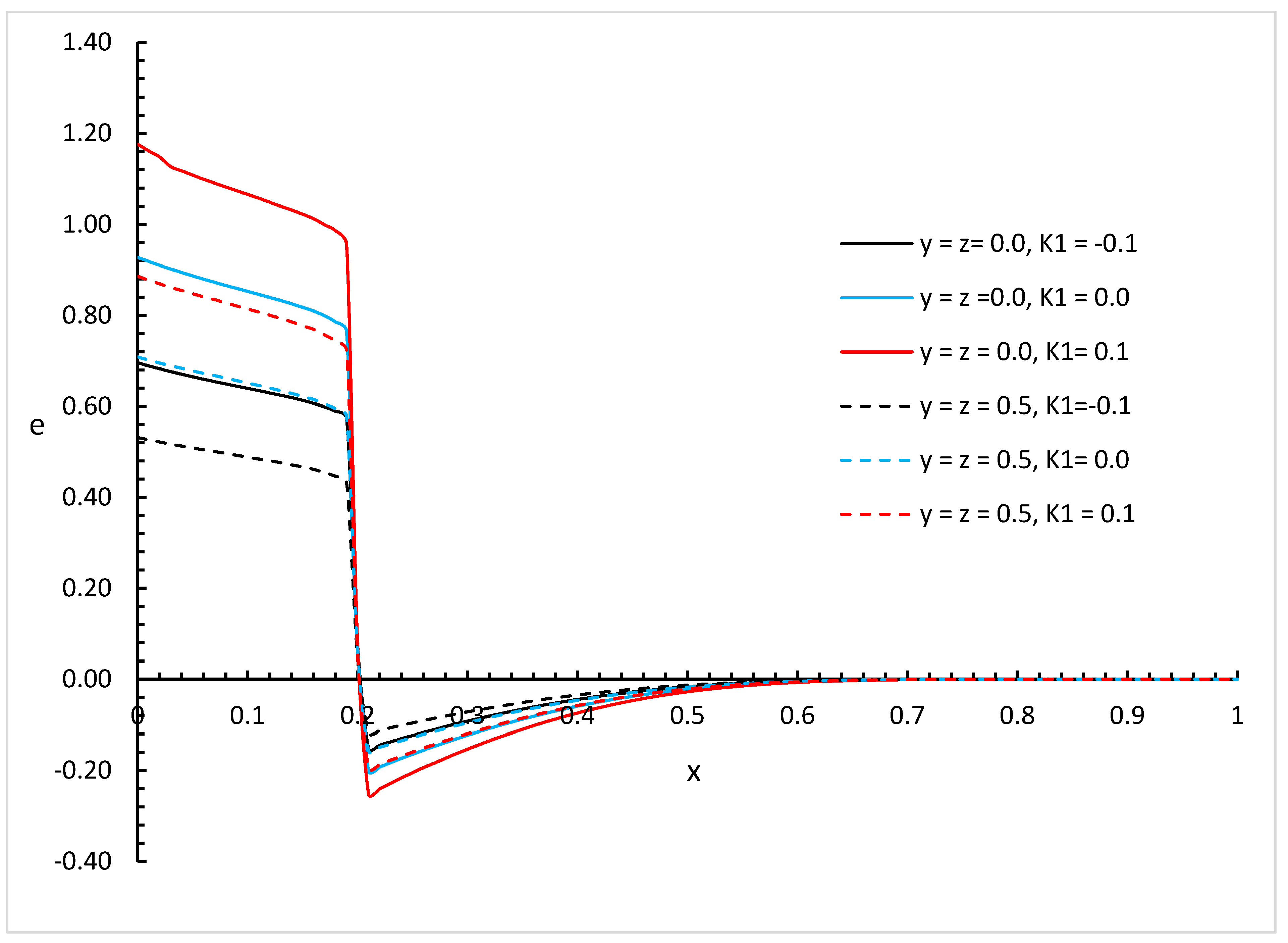
- It is noted that the value of the fractional order parameter and the variability of the thermal conductivity have significant effects on the mechanical and thermal waves.
- The distributions of the temperature increment, invariant stress, and invariant strain fall to zero at a smaller distance from the bounding surface in the order of strong thermal conductivity, followed by normal thermal conductivity, and finally weak thermal conductivity.
- The Moor–Gibson–Thompson model is a successful model for simulating three-dimensional thermoelastic materials with variable thermal conductivity and fractional order heat conduction.
- Classifying the thermal conductivity as weak, normal, and strong is important and close to the physical behaviour of the thermal conductivity of the thermoelastic materials.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Time | |
| Components of the stress tensor | |
| Components of the displacement vector | |
| Components of the strain tensor | |
| Thermal conductivity | |
| The thermal conductivity rate | |
| The thermal conductivity rate at room temperature | |
| The parameter of the thermal conductivity change | |
| Absolute temperature | |
| Reference temperature | |
| Temperature increment | |
| Specific heat at constant strain | |
| The coefficient of linear thermal expansion | |
| The diffusivity | |
| Relaxation time due to heat flux lag | |
| The average time of the thermal conductivity rate | |
| Longitudinal wave speed | |
| Lame’s constants | |
| Density | |
| The Kronecker delta function | |
| The thermal viscosity | |
| The ratio of the speed of the longitudinal wave to the shear wave | |
| The fractional order parameter of heat conduction | |
| The dimensionless thermoelastic coupling constant | |
| The Laplacian operator |
References
- Biot, M.A. Thermoelasticity and irreversible thermodynamics. J. Appl. Phys. 1956, 27, 240–253. [Google Scholar] [CrossRef]
- Sherief, H.; Naim Anwar, M.; Abd El-Latief, A.; Fayik, M.; Tawfik, A. A fully coupled system of generalized thermoelastic theory for semiconductor medium. Sci. Rep. 2024, 14, 13876. [Google Scholar] [CrossRef] [PubMed]
- Svanadze, M. On the coupled theory of thermoelastic double-porosity materials. J. Therm. Stress. 2022, 45, 576–596. [Google Scholar] [CrossRef]
- Lord, H.W.; Shulman, Y. A generalized dynamical theory of thermoelasticity. J. Mech. Phys. Solids 1967, 15, 299–309. [Google Scholar] [CrossRef]
- Alihemmati, J.; Beni, Y.T. Generalized thermoelasticity of microstructures: Lord-Shulman theory with modified strain gradient theory. Mech. Mater. 2022, 172, 104412. [Google Scholar] [CrossRef]
- Hou, W.; Fu, L.-Y.; Carcione, J.M.; Wang, Z.; Wei, J. Simulation of thermoelastic waves based on the Lord-Shulman theory. Geophysics 2021, 86, T155–T164. [Google Scholar] [CrossRef]
- Bouslimi, J.; Omri, M.; Kilany, A.; Abo-Dahab, S.; Hatem, A. Mathematical model on a photothermal and voids in a semiconductor medium in the context of Lord-Shulman theory. Waves Random Complex Media 2024, 34, 5594–5611. [Google Scholar] [CrossRef]
- Green, A.; Lindsay, K. Thermoelasticity. J. Elast. 1972, 2, 1–7. [Google Scholar] [CrossRef]
- Sharifi, H. Dynamic response of an orthotropic hollow cylinder under thermal shock based on Green–Lindsay theory. Thin-Walled Struct. 2023, 182, 110221. [Google Scholar] [CrossRef]
- Karimipour Dehkordi, M.; Kiani, Y. Lord–Shulman and Green–Lindsay-based magneto-thermoelasticity of hollow cylinder. Acta Mech. 2024, 235, 51–72. [Google Scholar] [CrossRef]
- Green, A.; Naghdi, P. On undamped heat waves in an elastic solid. J. Therm. Stress. 1992, 15, 253–264. [Google Scholar] [CrossRef]
- Green, A.; Naghdi, P. Thermoelasticity without energy dissipation. J. Elast. 1993, 31, 189–208. [Google Scholar] [CrossRef]
- Hendy, M.M.; Ezzat, M.A. A modified Green-Naghdi fractional order model for analyzing thermoelectric MHD. Int. J. Numer. Methods Heat Fluid Flow 2024, 34, 2376–2398. [Google Scholar] [CrossRef]
- Jagtap, A.D.; Mitsotakis, D.; Karniadakis, G.E. Deep learning of inverse water waves problems using multi-fidelity data: Application to Serre–Green–Naghdi equations. Ocean Eng. 2022, 248, 110775. [Google Scholar] [CrossRef]
- Danyluk, M.; Geubelle, P.; Hilton, H. Two-dimensional dynamic and three-dimensional fracture in viscoelastic materials. Int. J. Solids Struct. 1998, 35, 3831–3853. [Google Scholar] [CrossRef]
- Ezzat, M.A.; Youssef, H.M. Three-dimensional thermal shock problem of generalized thermoelastic half-space. Appl. Math. Model. 2010, 34, 3608–3622. [Google Scholar] [CrossRef]
- Ezzat, M.A.; Youssef, H.M. Three-dimensional thermo-viscoelastic material. Mech. Adv. Mater. Struct. 2016, 23, 108–116. [Google Scholar] [CrossRef]
- Youssef, H.; Abbas, I. Thermal shock problem of generalized thermoelasticity for an infinitely long annular cylinder with variable thermal conductivity. Comput. Methods Sci. Technol. 2007, 13, 95–100. [Google Scholar] [CrossRef]
- Youssef, H.M. Two-dimensional thermal shock problem of fractional order generalized thermoelasticity. Acta Mech. 2012, 223, 1219–1231. [Google Scholar] [CrossRef]
- Hafed, Z.S.; Zenkour, A.M. Refined generalized theory for thermoelastic waves in a hollow sphere due to maintained constant temperature and radial stress. Case Stud. Therm. Eng. 2025, 68, 105905. [Google Scholar] [CrossRef]
- Khader, S.; Marrouf, A.; Khedr, M. A model for elastic half space under a visco-elastic layer in generalized thermoelasticity. Contin. Mech. Thermodyn. 2025, 37, 25. [Google Scholar] [CrossRef]
- Yahya, A.; Saidi, A. Response of Generalized Thermoelastic for Free Vibration of a Solid Cylinder with Voids Under a Dual-Phase Lag Model. Iran. J. Sci. Technol. Trans. Mech. Eng. 2025, 1–11. [Google Scholar] [CrossRef]
- Li, S.; Sun, J.; Zhu, J. Analytical solution of dual-phase-lagging generalized thermoelastic damping in Levinson micro/nano rectangular plates. J. Therm. Stress. 2025, 1–19. [Google Scholar] [CrossRef]
- Quintanilla, R. Moore–Gibson–Thompson thermoelasticity. Math. Mech. Solids 2019, 24, 4020–4031. [Google Scholar] [CrossRef]
- Quintanilla, R. Moore-Gibson-Thompson thermoelasticity with two temperatures. Appl. Eng. Sci. 2020, 1, 100006. [Google Scholar] [CrossRef]
- Singh, B.; Mukhopadhyay, S. Galerkin-type solution for the Moore–Gibson–Thompson thermoelasticity theory. Acta Mech. 2021, 232, 1273–1283. [Google Scholar] [CrossRef]
- Bazarra, N.; Fernández, J.R.; Quintanilla, R. Analysis of a Moore–Gibson–Thompson thermoelastic problem. J. Comput. Appl. Math. 2021, 382, 113058. [Google Scholar] [CrossRef]
- Fernández Sare, H.D.; Quintanilla, R. Moore Gibson Thompson thermoelastic plates: Comparisons. J. Evol. Equ. 2023, 23, 70. [Google Scholar] [CrossRef]
- Mondal, S.; Srivastava, A.; Mukhopadhyay, S. Thermoelastic wave propagation and reflection in biological tissue under nonlocal elasticity and Moore–Gibson–Thompson heat conduction: Modeling and analysis. Z. Angew. Math. Und Phys. 2025, 76, 30. [Google Scholar] [CrossRef]
- Kadian, P.; Kumar, S.; Sangwan, M. Influence of initial stress and gravity on fiber-reinforced thermoelastic solid using Moore–Gibson–Thompson generalized theory of thermoelasticity. Multidiscip. Model. Mater. Struct. 2025, 21, 217–238. [Google Scholar] [CrossRef]
- Ahmed, Y.; Zakria, A.; Osman, O.A.A.; Suhail, M.; Rabih, M.N.A. Fractional Moore–Gibson–Thompson Heat Conduction for Vibration Analysis of Non-Local Thermoelastic Micro-Beams on a Viscoelastic Pasternak Foundation. Fractal Fract. 2025, 9, 118. [Google Scholar] [CrossRef]
- Bahar, L.Y.; Hetnarski, R.B. State Space Approach to Thermoelasticity. J. Therm. Stress. 1978, 1, 135–145. [Google Scholar] [CrossRef]
- Ezzat, M.A. State space approach to solids and fluids. Can. J. Phys. 2008, 86, 1241–1250. [Google Scholar] [CrossRef]
- Bahar, L.; Hetnarski, R. Transfer matrix approach to thermoelasticity. In Proceedings of the 15th Midwest Mechanic Conference, Chicago, IL, USA, 15–17 May 1977; pp. 161–163. [Google Scholar]
- Povstenko, Y.Z. Fractional heat conduction equation and associated thermal stress. J. Therm. Stress. 2004, 28, 83–102. [Google Scholar] [CrossRef]
- Heymans, N.; Podlubny, I. Physical interpretation of initial conditions for fractional differential equations with Riemann-Liouville fractional derivatives. Rheol. Acta 2006, 45, 765–771. [Google Scholar] [CrossRef]
- Meral, F.; Royston, T.; Magin, R. Fractional calculus in viscoelasticity: An experimental study. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 939–945. [Google Scholar] [CrossRef]
- Youssef, H.M. Theory of fractional order generalized thermoelasticity. J. Heat Transf. 2010, 132, 061301. [Google Scholar] [CrossRef]
- Youssef, H.M. State-space approach to fractional order two-temperature generalized thermoelastic medium subjected to moving heat source. Mech. Adv. Mater. Struct. 2013, 20, 47–60. [Google Scholar] [CrossRef]
- Youssef, H.M.; Abbas, I.A. Fractional order generalized thermoelasticity with variable thermal conductivity. J. Vibroeng. 2014, 16, 4077–4087. [Google Scholar]
- Youssef, H.M.; Al-Lehaibi, E.A. Fractional order generalized thermoelastic half-space subjected to ramp-type heating. Mech. Res. Commun. 2010, 37, 448–452. [Google Scholar] [CrossRef]
- Hasselman, D.P. Thermal Stresses in Severe Environments; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Ezzat, M.A.; Youssef, H.M. State space approach for conducting magneto-thermoelastic medium with variable electrical and thermal conductivity subjected to ramp-type heating. J. Therm. Stress. 2009, 32, 414–427. [Google Scholar] [CrossRef]
- Youssef, H.M.; El-Bary, A. Mathematical model for thermal shock problem of a generalized thermoelastic layered composite material with variable thermal conductivity. Comput. Methods Sci. Technol. 2006, 12, 165–171. [Google Scholar] [CrossRef]
- Mirparizi, M.; Razavinasab, S.M. Modified Green–Lindsay analysis of an electro-magneto elastic functionally graded medium with temperature dependency of materials. Mech. Time-Depend. Mater. 2021, 26, 871–890. [Google Scholar] [CrossRef]
- Mirparizi, M.; Zhang, C.; Amiri, M.J. One-dimensional electro-magneto-poro-thermoelastic wave propagation in a functionally graded medium with energy dissipation. Phys. Scr. 2022, 97, 045203. [Google Scholar] [CrossRef]
- Mirparizi, M.; Shariyat, M.; Fotuhi, A. Large Deformation Hermitian Finite Element Coupled Thermoelasticity Analysis of Wave Propagation and Reflection in a Finite Domain. J. Solid Mech. 2021, 13, 485–502. [Google Scholar]
- Hetnarski, R.B.; Eslami, M.R.; Gladwell, G. Thermal Stresses: Advanced Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Wang, X.; Shao, M.; Zhang, S.; Liu, X. Biomedical applications of gold nanorod-based multifunctional nano-carriers. J. Nanoparticles Res. 2013, 15, 1892–1913. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Youssef, H.M. Stat-Space Approach to Three-Dimensional Thermoelastic Half-Space Based on Fractional Order Heat Conduction and Variable Thermal Conductivity Under Moor–Gibson–Thompson Theorem. Fractal Fract. 2025, 9, 145. https://doi.org/10.3390/fractalfract9030145
Youssef HM. Stat-Space Approach to Three-Dimensional Thermoelastic Half-Space Based on Fractional Order Heat Conduction and Variable Thermal Conductivity Under Moor–Gibson–Thompson Theorem. Fractal and Fractional. 2025; 9(3):145. https://doi.org/10.3390/fractalfract9030145
Chicago/Turabian StyleYoussef, Hamdy M. 2025. "Stat-Space Approach to Three-Dimensional Thermoelastic Half-Space Based on Fractional Order Heat Conduction and Variable Thermal Conductivity Under Moor–Gibson–Thompson Theorem" Fractal and Fractional 9, no. 3: 145. https://doi.org/10.3390/fractalfract9030145
APA StyleYoussef, H. M. (2025). Stat-Space Approach to Three-Dimensional Thermoelastic Half-Space Based on Fractional Order Heat Conduction and Variable Thermal Conductivity Under Moor–Gibson–Thompson Theorem. Fractal and Fractional, 9(3), 145. https://doi.org/10.3390/fractalfract9030145