Fractional-Order Dynamics in Epidemic Disease Modeling with Advanced Perspectives of Fractional Calculus



Abstract
1. Introduction
2. Preliminaries
3. Main Results and Analysis
Existence Theory
4. Numerical Scheme and Simulations
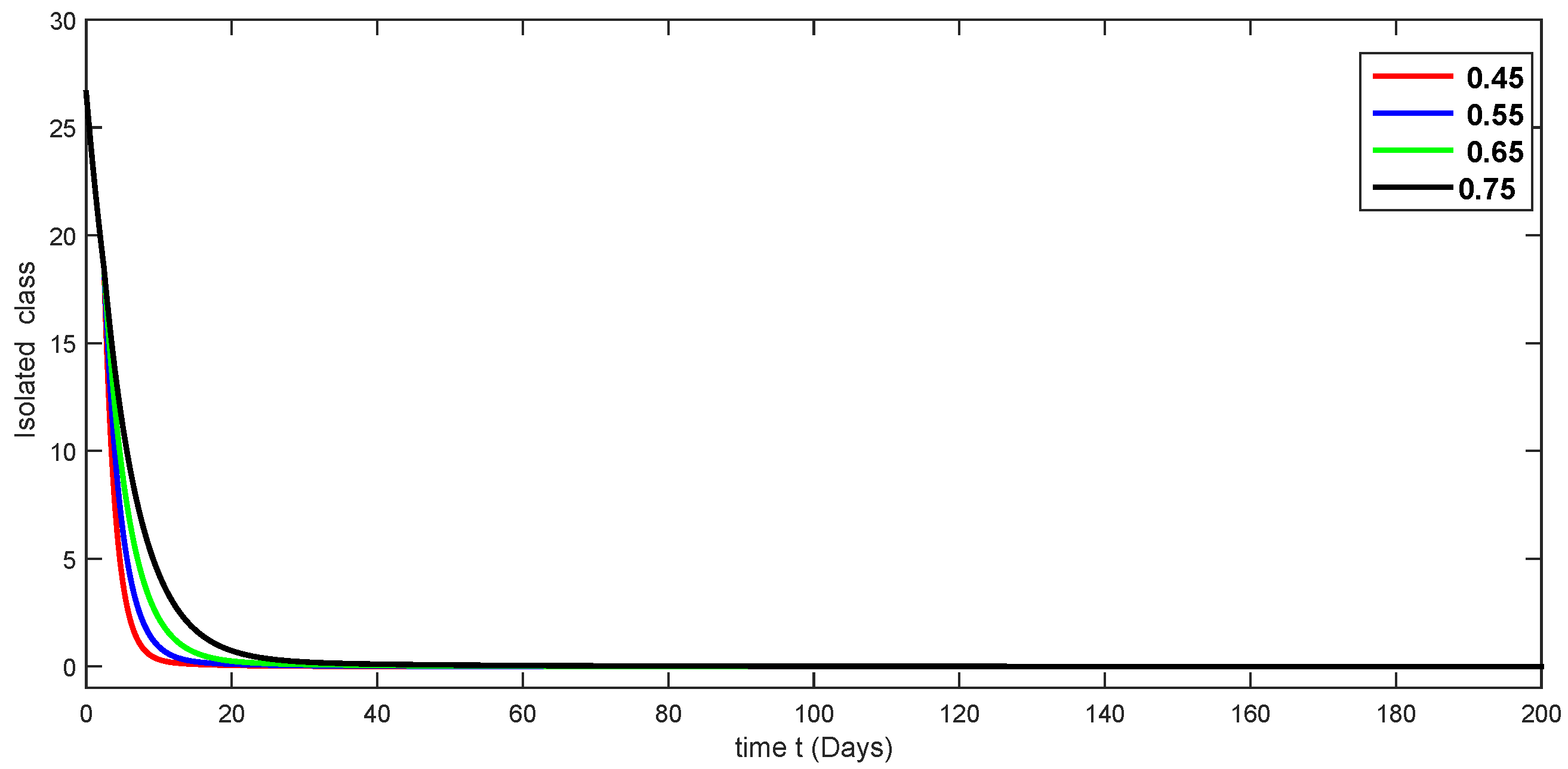
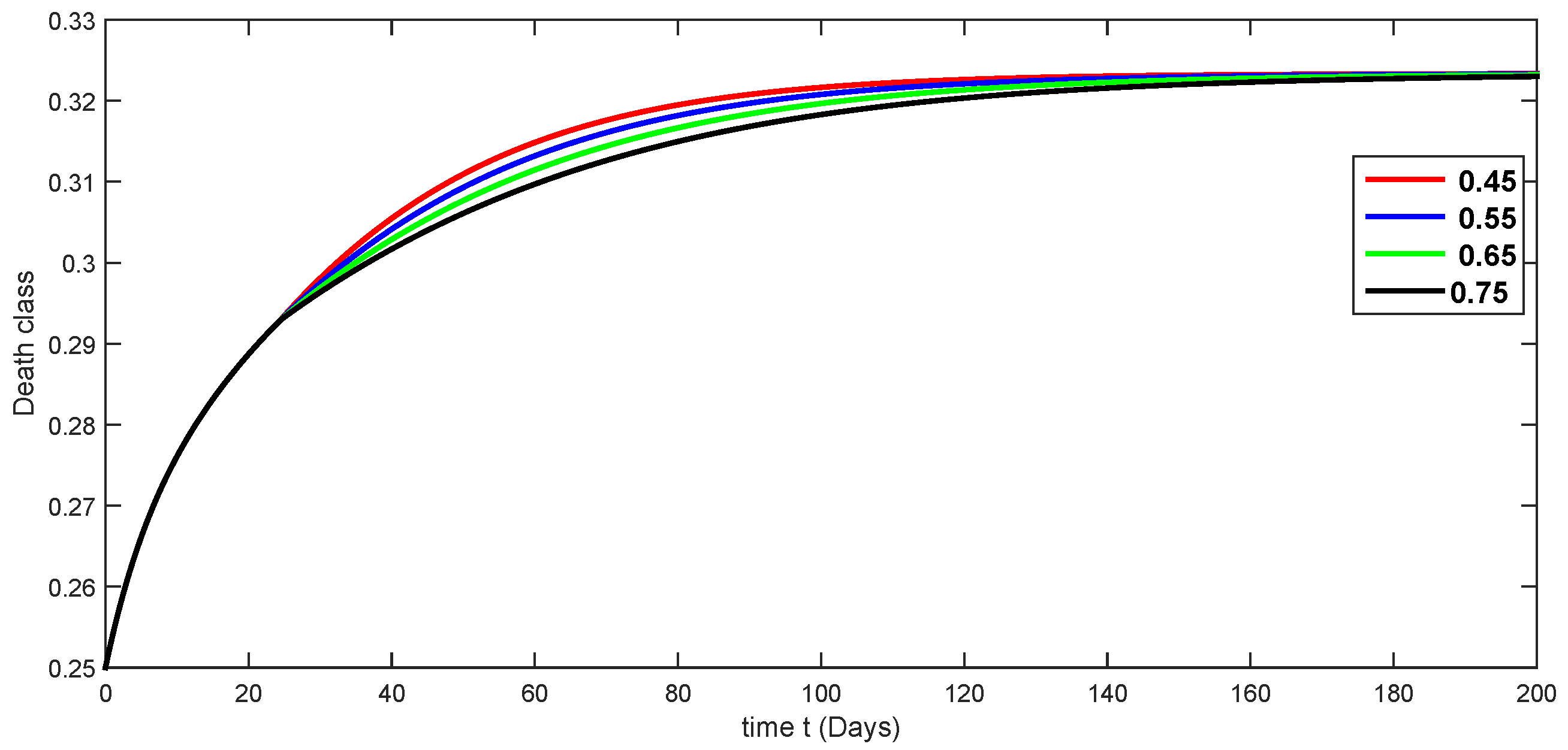
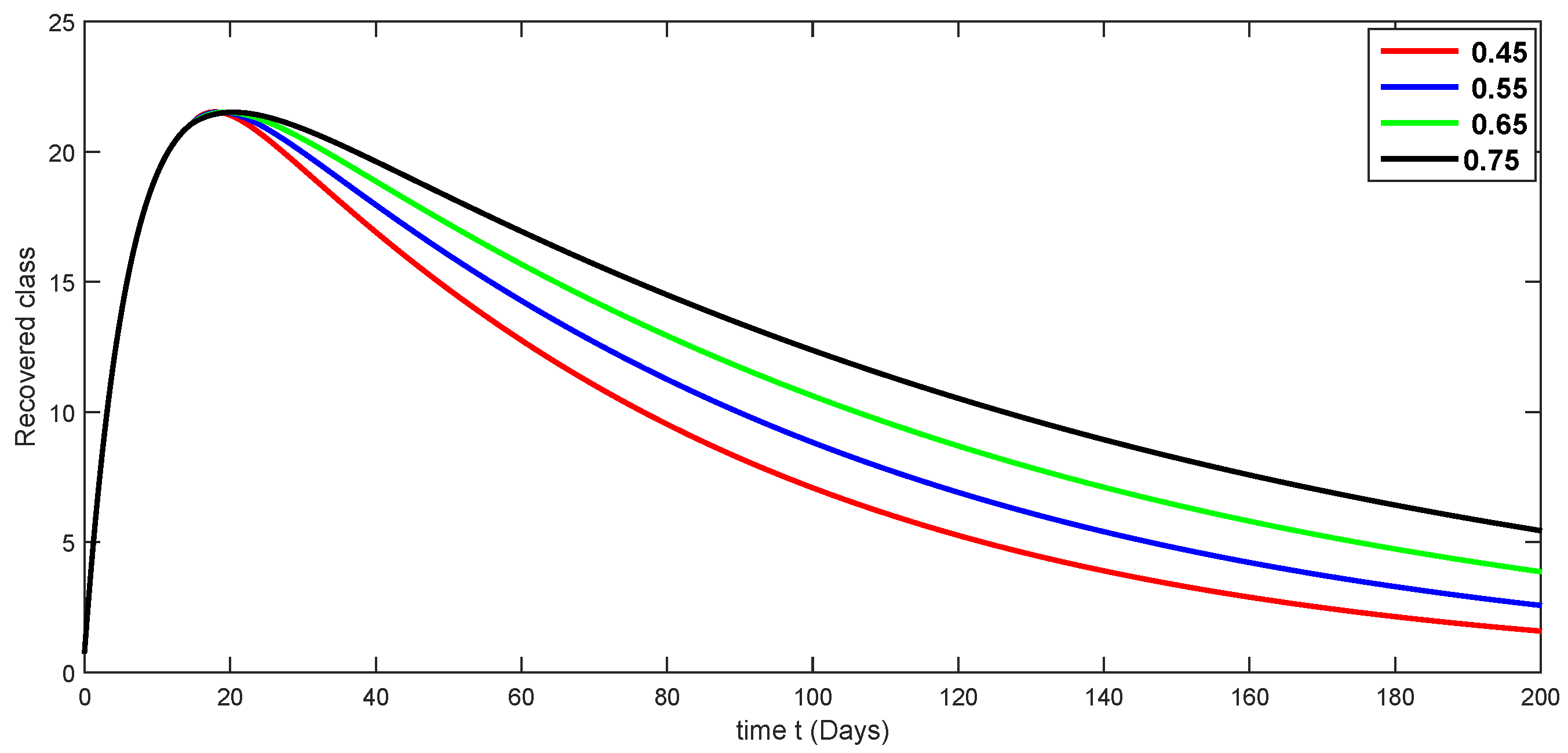
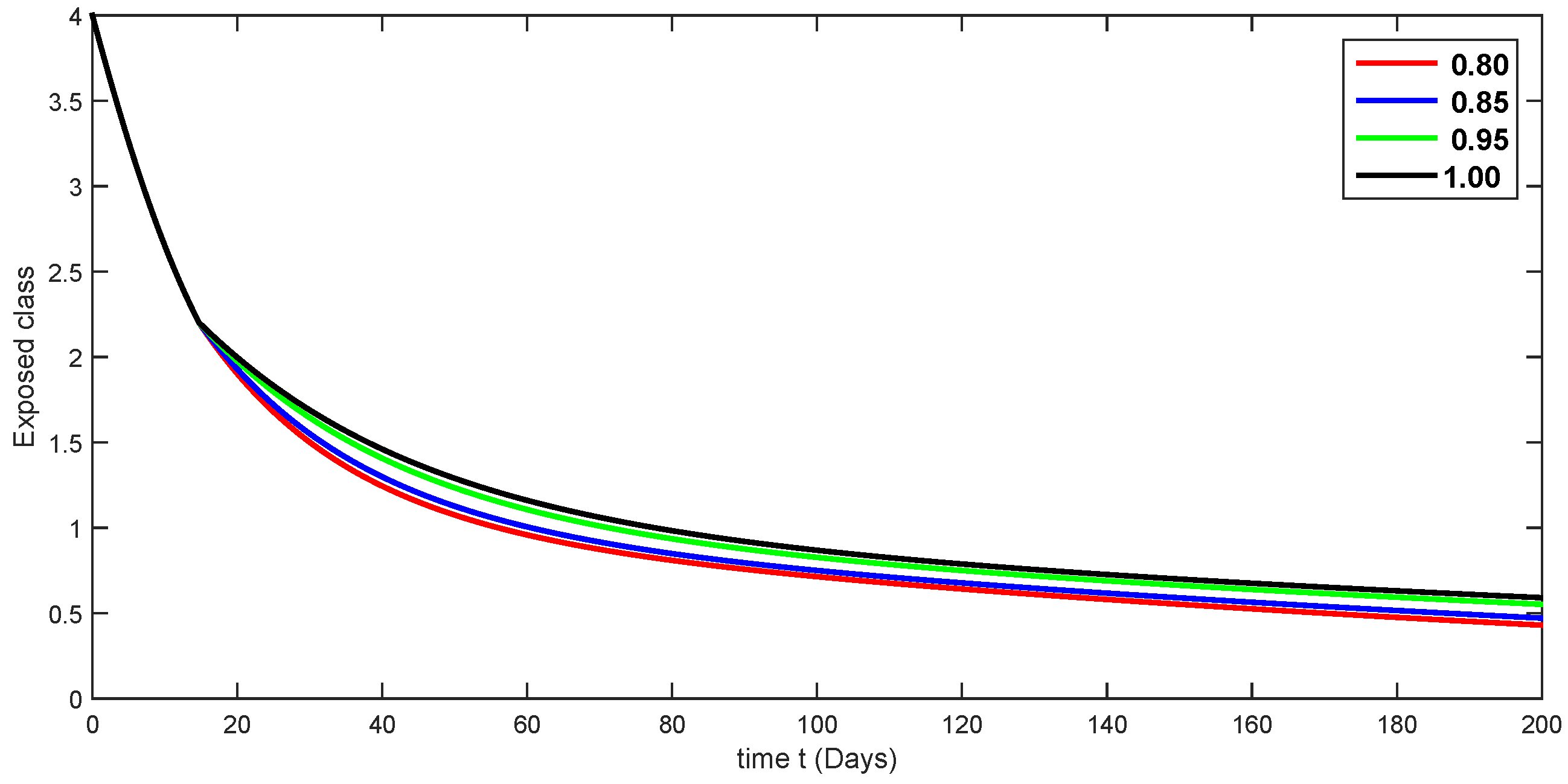
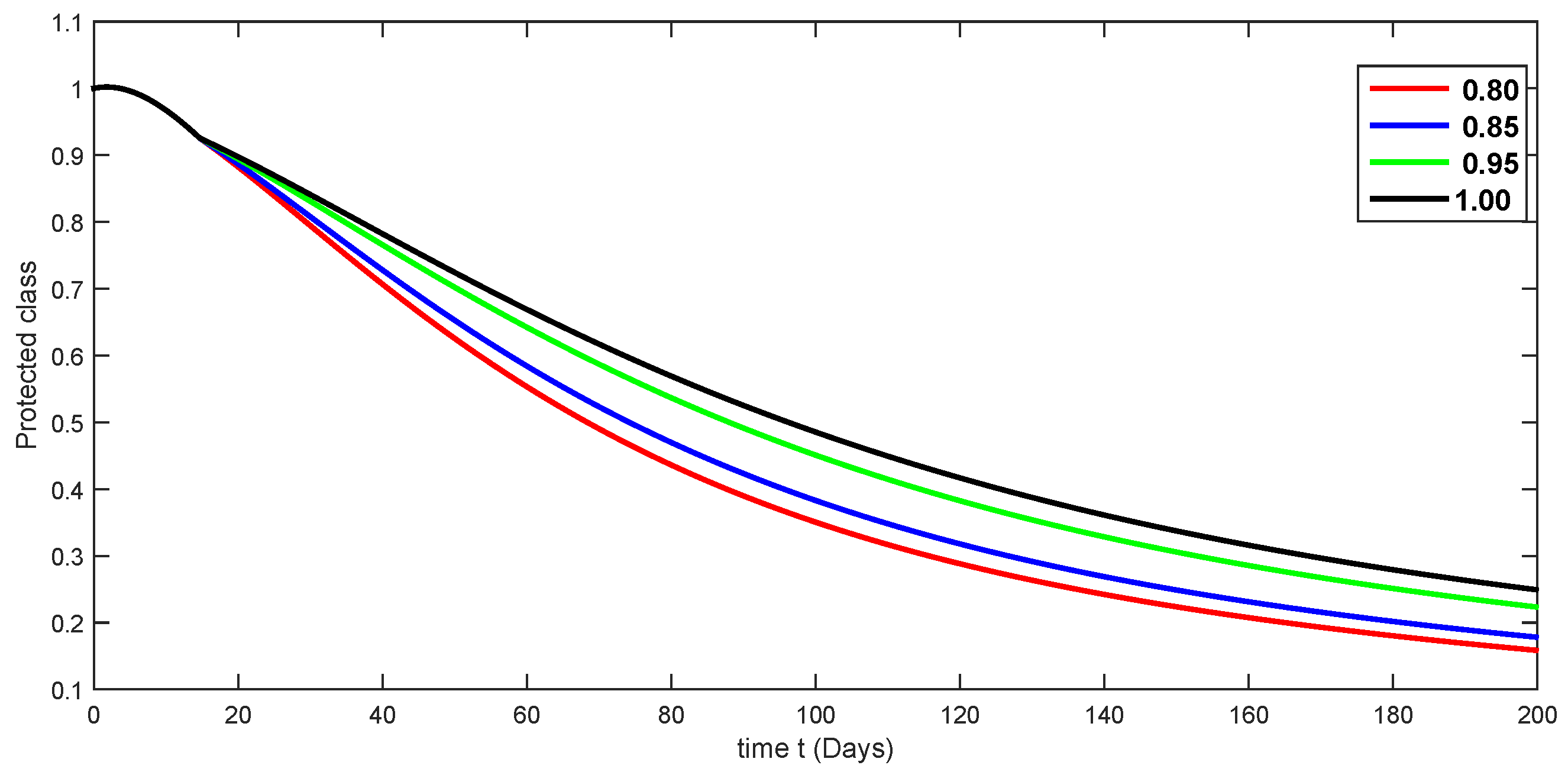
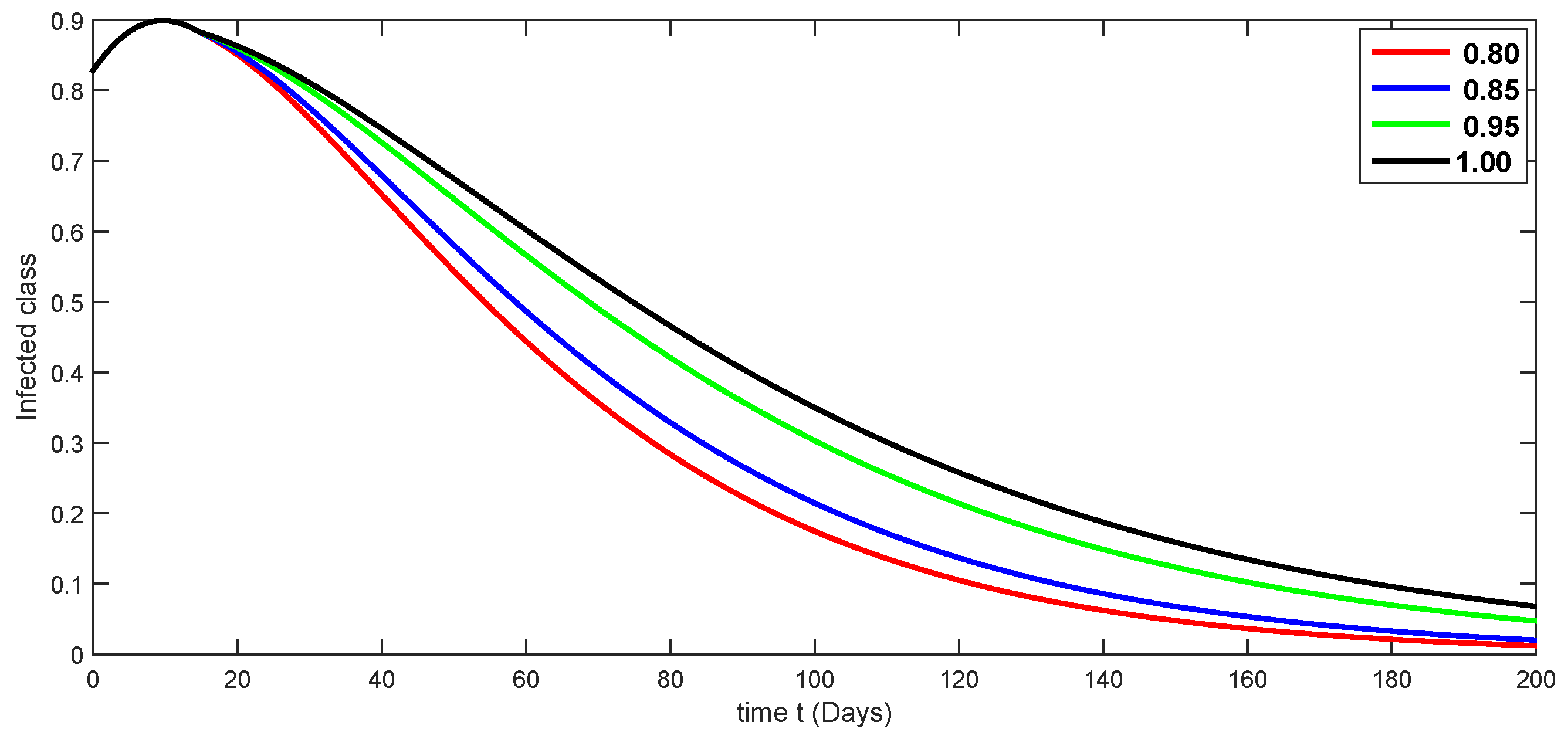
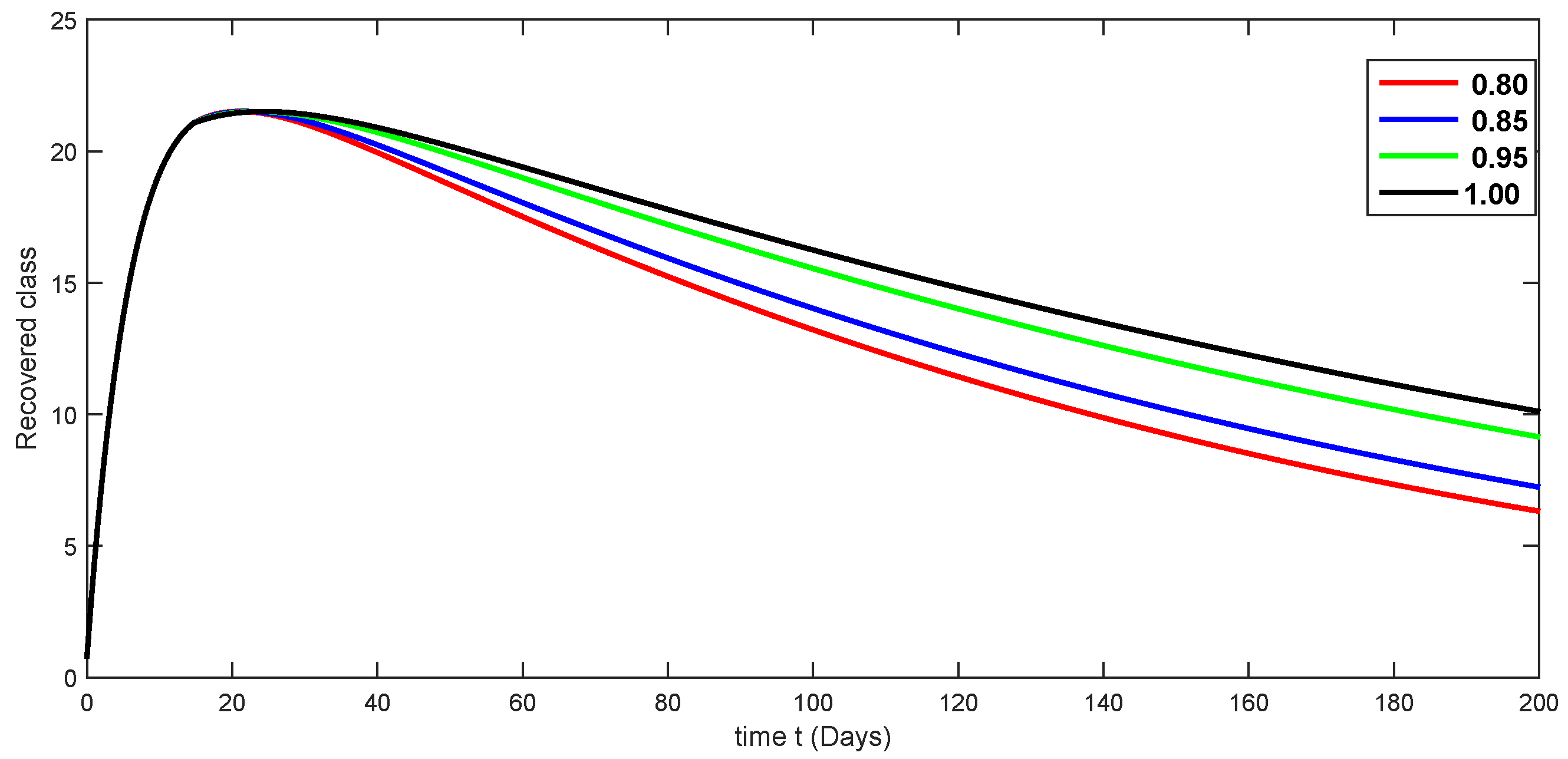
5. Numerical Simulation of Our Model
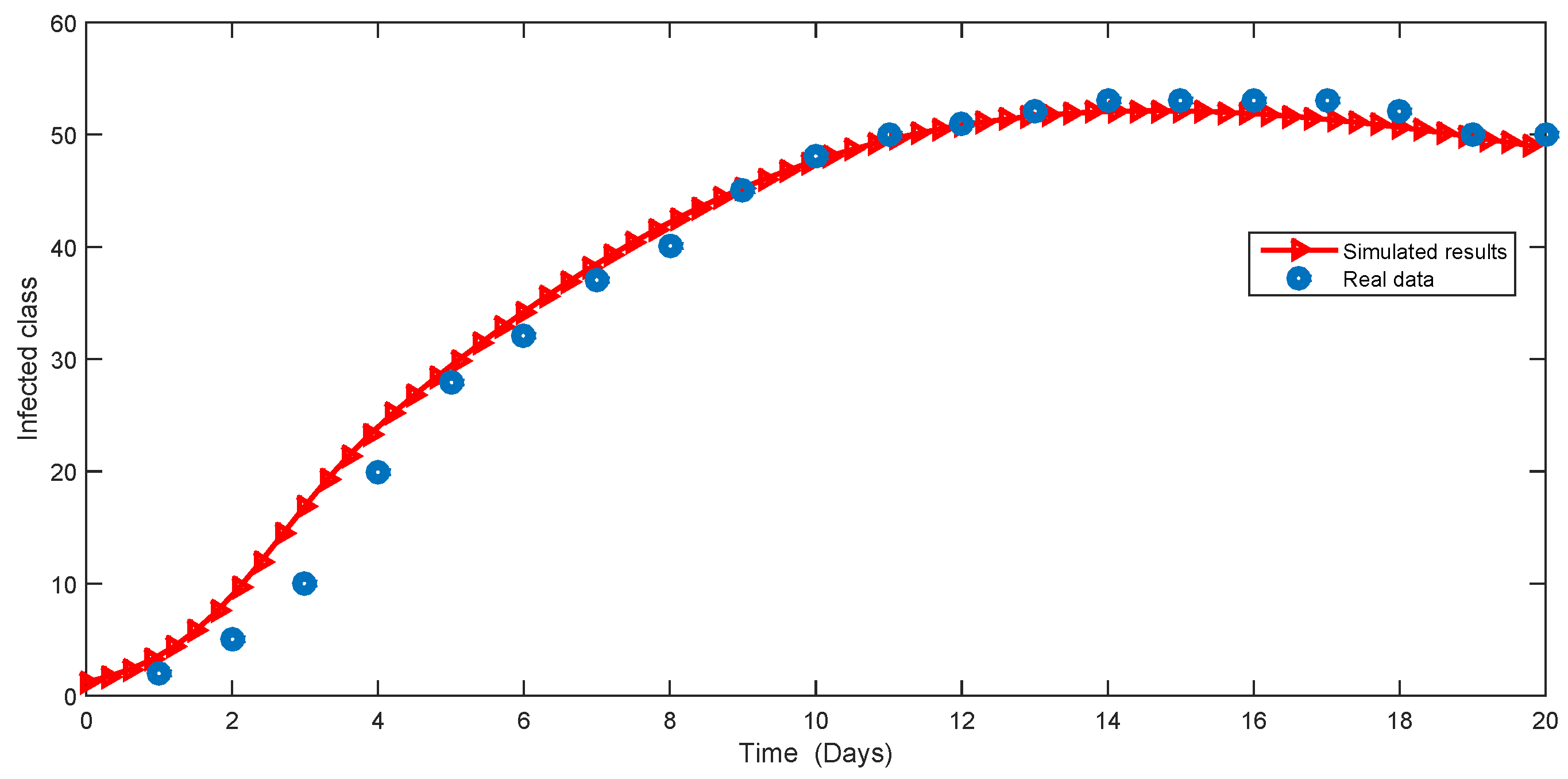
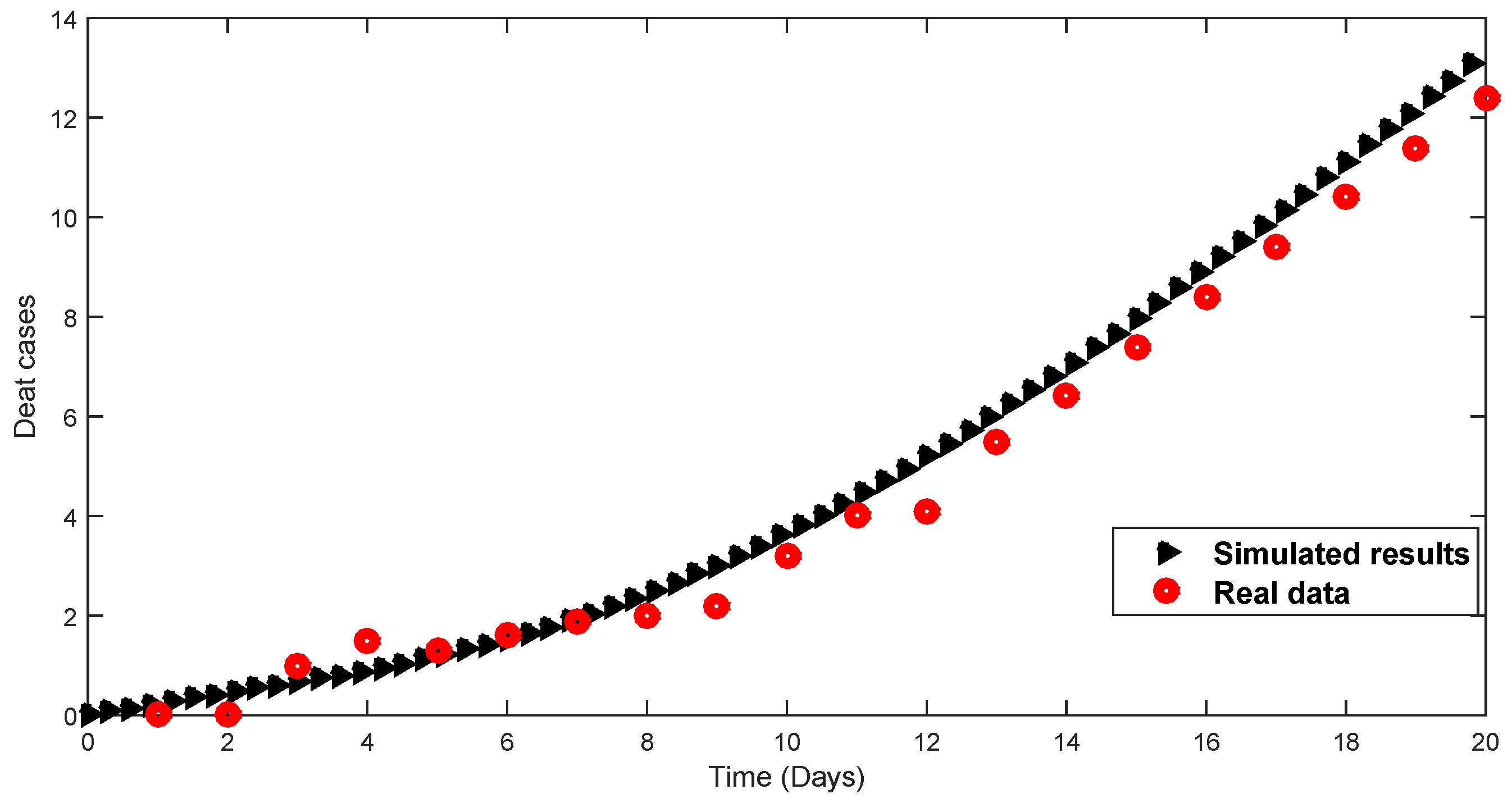
6. Numerical Discussion and Comparison with Real Data
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ross, R. An application of the theory of probabilities to the study of a priori pathometry-Part I. Proc. R. Soc. Lond. Ser. A Contain. Pap. Math. Phys. Character 1916, 92, 204–230. [Google Scholar]
- Ross, R.; Hudson, H.P. An application of the theory of probabilities to the study of a priori pathometry Part II. Proc. R. Soc. Lond. Ser. A Contain. Pap. Math. Phys. Character 1917, 93, 212–225. [Google Scholar]
- Kermack, W.O.; McKendrick, A.G. A contribution to the mathematical theory of epidemics. Proc. R. Soc. Lond. Ser. A Contain. Pap. Math. Phys. Character 1927, 115, 700–721. [Google Scholar]
- La Salle, J.P. The Stability of Dynamical Systems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1976. [Google Scholar]
- Korobeinikov, A. Global properties of basic virus dynamics models. Bull. Math. Biol. 2004, 66, 879–883. [Google Scholar] [CrossRef] [PubMed]
- Patel, P.; Borkowf, C.B.; Brooks, J.T.; Lasry, A.; Lansky, A.; Mermin, J. Estimating per-act HIV transmission risk: A systematic review. AIDS 2014, 28, 1509. [Google Scholar] [CrossRef]
- Munch, Z.; Van Lill, S.W.P.; Booysen, C.N.; Zietsman, H.L.; Enarson, D.A.; Beyers, N. Tuberculosis transmission patterns in a high-incidence area: A spatial analysis. Int. J. Tuberc. Lung Dis. 2003, 7, 271–277. [Google Scholar] [PubMed]
- Nuno, M.; Castillo-Chavez, C.; Feng, Z.; Martcheva, M. Mathematical models of influenza: The role of cross-immunity, quarantine and age-structure. In Mathematical Epidemiology; Springer: Berlin/Heidelberg, Germany, 2008; pp. 349–364. [Google Scholar]
- Schaffner, F.; Mathis, A. Dengue and dengue vectors in the WHO European region: Past, present, and scenarios for the future. Lancet Infect. Dis. 2014, 14, 1271–1280. [Google Scholar] [CrossRef]
- Agusto, F.B.; Adekunle, A.I. Optimal control of a two-strain tuberculosis-HIV/AIDS co-infection model. Biosystems 2014, 119, 20–44. [Google Scholar] [CrossRef] [PubMed]
- Forouzannia, F.; Gumel, A. Dynamics of an age-structured two-strain model for malaria transmission. Appl. Math. Comput. 2015, 250, 860–886. [Google Scholar] [CrossRef]
- Atangana, A.; Araz, S.I. New concept in calculus: Piecewise differential and integral operators. Chaos Solitons Fractals 2021, 145, 110638. [Google Scholar] [CrossRef]
- Ross, B. A brief history and exposition of the fundamental theory of fractional calculus. In Fractional Calculus and Its Applications; Springer: Berlin/Heidelberg, Germany, 1975; pp. 1–36. [Google Scholar]
- Baba, I.A.; Hincal, E. Global stability analysis of two-strain epidemic model with bilinear and non-monotone incidence rates. Eur. Phys. J. Plus 2017, 132, 208. [Google Scholar] [CrossRef]
- Baba, I.A.; Hincal, E.; Alsaadi, S.H.K. Global stability analysis of a two strain epidemic model with awareness. Adv. Differ. Equ. Control Process. 2018, 19, 83–100. [Google Scholar] [CrossRef]
- Bentaleb, D.; Amine, S. Lyapunov function and global stability for a two-strain SEIR model with bilinear and non-monotone incidence. Int. J. Biomath. 2019, 12, 1950021. [Google Scholar] [CrossRef]
- Meskaf, A.; Khyar, O.; Danane, J.; Allali, K. Global stability analysis of a two-strain epidemic model with non-monotone incidence rates. Chaos Solitons Fractals 2020, 133, 109647. [Google Scholar] [CrossRef]
- Ouncharoen, R.; Shah, K.; Ud Din, R.; Abdeljawad, T.; Ahmadian, A.; Salahshour, S.; Sitthiwirattham, T. Study of integer and fractional order COVID-19 mathematical model. Fractals 2020, 31, 2340046. [Google Scholar] [CrossRef]
- Arfan, M.; Shah, K.; Abdeljawad, T.; Mlaiki, N.; Ullah, A. A Caputo power law model predicting the spread of the COVID-19 outbreak in Pakistan. Alex. Eng. J. 2021, 60, 447–456. [Google Scholar] [CrossRef]
- Tuan, N.H.; Mohammadi, H.; Rezapour, S. A mathematical model for COVID-19 transmission by using the Caputo fractional derivative. Chaos Solitons Fractals 2020, 140, 110107. [Google Scholar] [CrossRef] [PubMed]
- Roccetti, M. Drawing a parallel between the trend of confirmed COVID-19 deaths in the winters of 2022/2023 and 2023/2024 in Italy, with a prediction. Math. Biosci. Eng. 2024, 21, 3742–3754. [Google Scholar] [CrossRef]
- Khan, S.; Khan, Z.A.; Alrabaiah, H.; Zeb, S. On using piecewise fractional differential operator to study a dynamical system. Axioms 2023, 12, 292. [Google Scholar] [CrossRef]
- Alharthi, N.H.; Jeelani, M.B. Study of Rotavirus Mathematical Model Using Stochastic and Piecewise Fractional Differential Operators. Axioms 2023, 12, 970. [Google Scholar] [CrossRef]
- Nisar, K.S.; Farman, M.; Jamil, K.; Akgül, A.; Jamil, S. Computational and stability analysis of Ebola virus epidemic model with piecewise hybrid fractional operator. PLoS ONE 2024, 19, e0298620. [Google Scholar] [CrossRef] [PubMed]
- Redhwan, S.S.; Han, M.; Almalahi, M.A.; Alyami, M.A.; Alsulami, M.; Alghamdi, N. Piecewise implicit coupled system under ABC fractional differential equations with variable order. AIMS Math. 2024, 9, 15303–15324. [Google Scholar] [CrossRef]
- Khan, S.; Shah, K.; Debbouche, A.; Zeb, S.; Antonov, V. Solvability and Ulam-Hyers stability analysis for nonlinear piecewise fractional cancer dynamic systems. Phys. Scr. 2024, 99, 025225. [Google Scholar] [CrossRef]
- Riaz, M.; Shah, K.; Ullah, A.; Alqudah, M.A.; Abdeljawad, T. The Volterra-Lyapunov matrix theory and nonstandard finite difference scheme to study a dynamical system. Results Phys. 2023, 52, 106890. [Google Scholar] [CrossRef]
- Shah, K.; Khan, A.; Abdalla, B.; Abdeljawad, T.; Khan, K.A. A mathematical model for Nipah virus disease by using piecewise fractional order Caputo derivative. Fractals 2024, 32, 2440013. [Google Scholar] [CrossRef]
- Atangana, A.; Araz, S.I. Piecewise differential equations: Theory, methods and applications. AIMS Math. 2023, 8, 15352–15382. [Google Scholar] [CrossRef]
- Atangana, A. Mathematical model of survival of fractional calculus, critics and their impact: How singular is our world? Adv. Differ. Equ. 2021, 2021, 403. [Google Scholar] [CrossRef]
- 2021. Available online: https://www.worldometers.info/coronavirus/country/pakistan/ (accessed on 13 April 2024).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
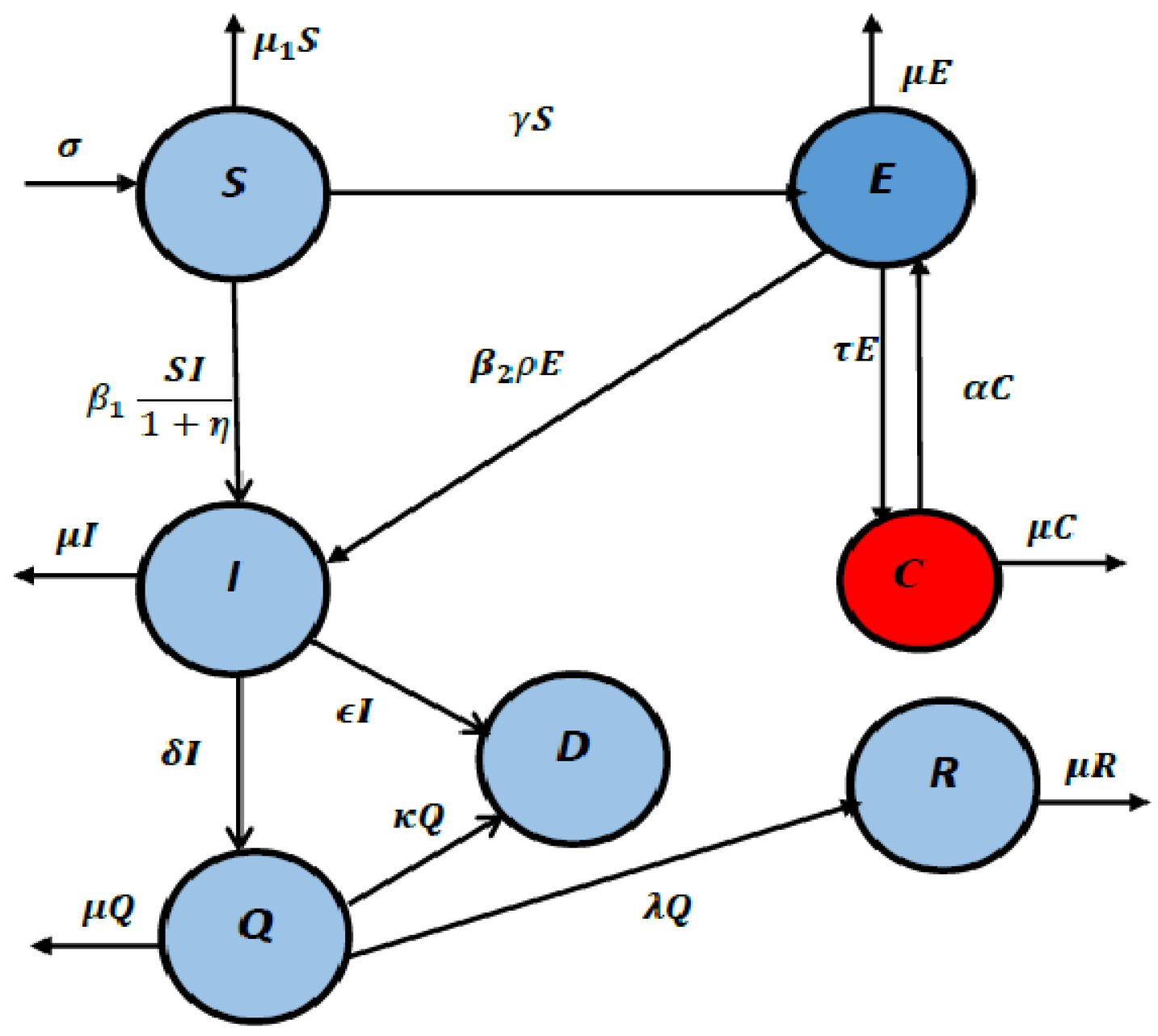
| Nomenclature | Description |
|---|---|
| S | Susceptible (the individuals at risk of being affected) |
| C | Protected class (individuals without infection and showing no symptoms) |
| E | Exposed (Potentially affected class) |
| I | Infected class |
| Q | Isolated class |
| D | Death class |
| R | Recovered class |
| Rate of natural mortality | |
| The rate of immigration into S | |
| Saturation threshold | |
| Isolation rate | |
| Rate of protective measures | |
| The rate of disease transmission through contact | |
| Infectivity rate | |
| Rate of immigration from S to E | |
| k | Viral mortality rate |
| Rate of recovery from Q | |
| Duration of protection | |
| Mortality rate from infection |
| Parameter | Numerical Values | Parameter | Numerical Values |
|---|---|---|---|
| 0.00992590 | 0.020 | ||
| 0.00200 | 0.005 | ||
| 0.02330 | 0.0714 | ||
| 0.00100 | 0.02202643 | ||
| 0.1000 | k | 0.000123 | |
| 0.0290 | 0.13978 | ||
| 0.008 | 5.93 | ||
| 4.0 | 1.0 | ||
| 0.828596 | 26.60 | ||
| 0.250 | 0.8160360 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Riaz, M.; Khan, Z.A.; Ahmad, S.; Ateya, A.A. Fractional-Order Dynamics in Epidemic Disease Modeling with Advanced Perspectives of Fractional Calculus. Fractal Fract. 2024, 8, 291. https://doi.org/10.3390/fractalfract8050291
Riaz M, Khan ZA, Ahmad S, Ateya AA. Fractional-Order Dynamics in Epidemic Disease Modeling with Advanced Perspectives of Fractional Calculus. Fractal and Fractional. 2024; 8(5):291. https://doi.org/10.3390/fractalfract8050291
Chicago/Turabian StyleRiaz, Muhammad, Zareen A. Khan, Sadique Ahmad, and Abdelhamied Ashraf Ateya. 2024. "Fractional-Order Dynamics in Epidemic Disease Modeling with Advanced Perspectives of Fractional Calculus" Fractal and Fractional 8, no. 5: 291. https://doi.org/10.3390/fractalfract8050291
APA StyleRiaz, M., Khan, Z. A., Ahmad, S., & Ateya, A. A. (2024). Fractional-Order Dynamics in Epidemic Disease Modeling with Advanced Perspectives of Fractional Calculus. Fractal and Fractional, 8(5), 291. https://doi.org/10.3390/fractalfract8050291