1. Introduction
Fractional calculus is a sort of fractional differential equation that resembles a large sweeping differential equation [
1]. In the sense that many theoretical and practical characteristics of differential equations can be easily extended to fractional differential equations while maintaining the same character and spirit. In a letter to Leibniz in 1695, L’Hopital demanded a precise description of the derivative of order
n = 0.5, sowing the seeds of fractional calculus almost 300 years ago. As a result, fractional integrals and derivatives differ from regular integrals and derivatives in a variety of ways, allowing them to be applied to a broader range of problems that integer-order calculus cannot adequately capture. In many branches of science and engineering, fractional calculus has been carefully developed to be a very authoritative approach to assist scientists in uncovering the hidden properties of the dynamics of multidimensional systems. Fractional calculus has played a crucial role in recent years as a proficient, efficient, and elementary theoretical basis for more accurate modelling of diverse dynamic processes. As a result, fractional calculus is being utilized more frequently in modelling, signal processing, physics, electromagnetics, biological systems, mechanics, medicine, biology, chemistry, bioengineering, and other domains [
2,
3]. Differential equations with non-integer derivatives [
4] have been discovered lately. For example, fractional derivatives can be utilized to anticipate seismic nonlinear oscillations [
5]. Nonlinear equations with multi-order fractional derivatives have recently been added to the list of applications. The complex transformation of fractional order is used to turn a fractional order nonlinear partial differential equation (FNPDE) into a nonlinear ordinary differential equation (NODE) [
6,
7]. Fractional order differential equations are well represented by a variety of significant phenomena in material science, electrochemistry, electromagnetics, and viscoelasticity [
8,
9]. Researchers [
10,
11] give a physical understanding of fractional calculus.
A soliton is a self-reinforcing wave packet that maintains its shape while propagating at a constant rate. Solitons, in other words, are unaffected by collisions with other solitons in terms of shape and speed, and are studied in nuclear physics, quantum mechanics, and waves along a weakly anharmonic mass-spring chain. Periodic travelling waves, among other things, play a role in self-oscillatory systems, reaction–diffusion–advection systems, and excitable chemical reactions. The motion of a particle in a potential field in the presence of dissipation is referred to as self-oscillatory dynamics. The described method of self-oscillation excitation is caused by features of a potential whose shape is dependent on the system state, rather than by characteristics of a dissipation function. Furthermore, properties of a potential function allow for self-oscillation excitation in the scenario where the dissipation function is positive at each phase space point. Reaction-diffusion-advection equations are partial differential equations that describe the evolution of a substance (e.g., a drug) in a medium described by spatial coordinates, involving sheltered transport (or advection) according to a physical or chemical force represented by a velocity vector, diffusion, or irregular motion of the material molecules in the medium, and reaction (e.g., chemical) with other constituents present in the medium represented by a reaction vector. They demonstrate physical properties such as the singular periodic wave solution, singular single-soliton solution, and singularly double periodic wave solution. The solutions’ features make them ideal for analyzing nonlinear processes in applied math, physics, and engineering.
The dynamics of waves in the fractional Schrödinger equation with harmonic potential were studied by Zhang et al. [
12]. To explore such dynamics, they used an analytical technique with fractional Laplacian derivative and compared it to numerical simulation. They discovered that the beams follow zigzag and funnel-like patterns in one and two dimensions, which become irregular after a substantial period of propagation. In a fractional Schrödinger equation with a
-symmetric potential, Zhang et al. [
13] explored the conical diffraction of a light beam. Their research not only shows how to acquire beam localization in a
-symmetric potential without using nonlinearities, but it also relates fractional Laplacian and symmetry, implying that their research has benefits on both sides. As a result, it could have a lot of potential for manufacturing on-chip optical devices. Through the longitudinal modulation of the transverse Gaussian and periodic potentials, Zhang et al. [
14] also studied resonant mode conversions and Rabi oscillations in the fractional Schrödinger equation. They discovered that the Lévy index can efficiently alter the oscillation period and conversion efficiency.
As a result of the introduction of symbolic computation tools like Maple and Mathematica, various numerical and analytical approaches for searching accurate solutions of nonlinear evolution equations (NLEEs) have garnered further attention. Many approaches for obtaining exact solutions have been devised and established as a result, including the Cole-Hopf transformation [
15], Tanh-function [
16], Inverse scattering transform [
17], Exp-function [
18,
19,
20,
21,
22,
23], differential transform [
24], and Laplace perturbation [
25], F-expansion [
26] methods.
Wang et al. [
27] recently proposed an expansion method called the (
G′/
G) -expansion, which they demonstrated to be a powerful method for finding analytic solutions to NLEEs. It is a trustworthy method for obtaining a wide range of solitary wave solutions, such as hyperbolic, trigonometric, and rational functions.
The (
G′/
G)-expansion approach recently become popular [
28,
29] has caught the interest of a large number of scientists. The method was used to create closed form solutions to a number of NPDEs. The travelling waves solutions of biological population model of fractional order, the Burgers equation with time-fractional order, and the space-time fractional Whitham–Broer–Kaup model were investigated by Arshed and Sadia [
30] by using the (
G′/
G2)-expansion methodology in 2018. In 2020, the (
G′/
G2)-expansion method was used to build numerous novel accurate travelling wave solutions for the Boiti–Leon–Pempinelli system in two dimensions [
31]. The unidirectional Dullin–Gottwald–Holm (DGH) system describing wave prorogation in shallow water, which include singular periodic wave solutions, shock-singular, shock, and singular solutions investigated in 2021 by Bilal et al. [
32] to find novel exact solutions via the (
G′/
G2)- expansion approach.
A novel (
G′/
G2)-expansion method is introduced in this article, to solve the MCH equation of fractional order in the sense of Jumarie [
33], and we discover a large number of new families of precise solutions. The proposed technique has never been reported in the literature previously which make it novel.
The Jumarie fractional order derivative of order
is demarcated by the expression:
Properties of Jumarie’s fractional derivative are:
2. The Methodology
Assume that a fractional PDE has the form:
In which the unknown function is denoted by .
The method’s main steps are as follows:
Step 1: The complex fractional transformation [
7]
In which L and V are arbitrary constants transforms Equation (5) into an ODE
where ordinary derivatives with regard to η are denoted by superscripts.
Step 2: If possible, integrate Equation (7) one or more times to obtain integration constants that can be determined later.
Step 3: Assume the solution to Equation (7) can be categorized as follows:
where
and
H are constants, found later, and
G is the solution of following differential equation:
with
and
being integers.
Step 4: According to the balancing principle between the highest order derivative and the nonlinear term in Equation (7), the value of a positive integer p can be determined.
Step 5: We get polynomials in by substituting Equation (8) with Equation (9) into Equation (7). The system of algebraic equations is obtained by putting to zero each coefficient of the resultant polynomials. By solving system of equations with Maple, the values of the constants , can be retrieved.
Step 6: On the base of the general solutions of Equation (9), the ratio
can be split into three categories:
where
E and
F are constants that are not zero.
3. Application
Consider the following time fractional MCH equation:
where
is the Jumarie fractional derivative of order
is a non-zero real constant, and
is a positive constant.
Many researchers have examined the simplified MCH equation and attempted to obtain exact answers in a number of approaches. For example, Liu et al. [
34] are interested in solving the simplified MCH equation using the
-expansion method, with an auxiliary equation as linear ordinary differential equation (LODE) of second order. The sine-cosine approach was used on MCH equation by Wazwaz [
35] to investigate the exact solutions. The
-expansion strategy was used to MCH problem in conjunction with the generalized Riccati equation by Zaman and Sultana [
36] to obtain the closed form solutions.
Using Equation (4), we convert Equation (12) into an ODE, and integrating once, we get:
where
is an integration constant that will be calculated later.
In Equation (14), we obtain
p = 1 by applying the homogeneous balancing principle among the uppermost order derivative and the uppermost order nonlinear term. As a result, trial solution (8) is:
In equating the coefficients of all
a system of equations for the unknowns
,
,
,
,
and
are given as by putting the left hand side of Equation (15) into Equation (14).
Using symbolic computation software to solve the given system of equations, we get the following results:
When the three cases with Equation (16) and the interleaving ratios Equations (10)–(12) are combined, there are three clusters of solutions for Equation (13):
Family 1. When
, the trigonometric function solution of the Equation (13) is
where
When
, the solution of Equation (13) is:
where
When
, the solution of the Equation (13) is:
where
Family 2. When
, the solution of the Equation (13) is:
where
When
, the solution of the Equation (13) is:
where
.
When
, the solution of the Equation (13) is:
where
Family 3. When
, the solution of the Equation (13) is:
where
When
, the solution of the Equation (13) is:
where
When
, the solution of the Equation (13) is:
where
The main advantage of the presented method is that it offers more general and enormous amount of new exact traveling wave solutions when we take different values to p with some free parameters. The exact solutions have its extensive importance to interpret the inner structures of the natural phenomena. The explicit solutions represented various types of solitary wave solutions according to the variation of the physical parameters.
4. Results and Discussion
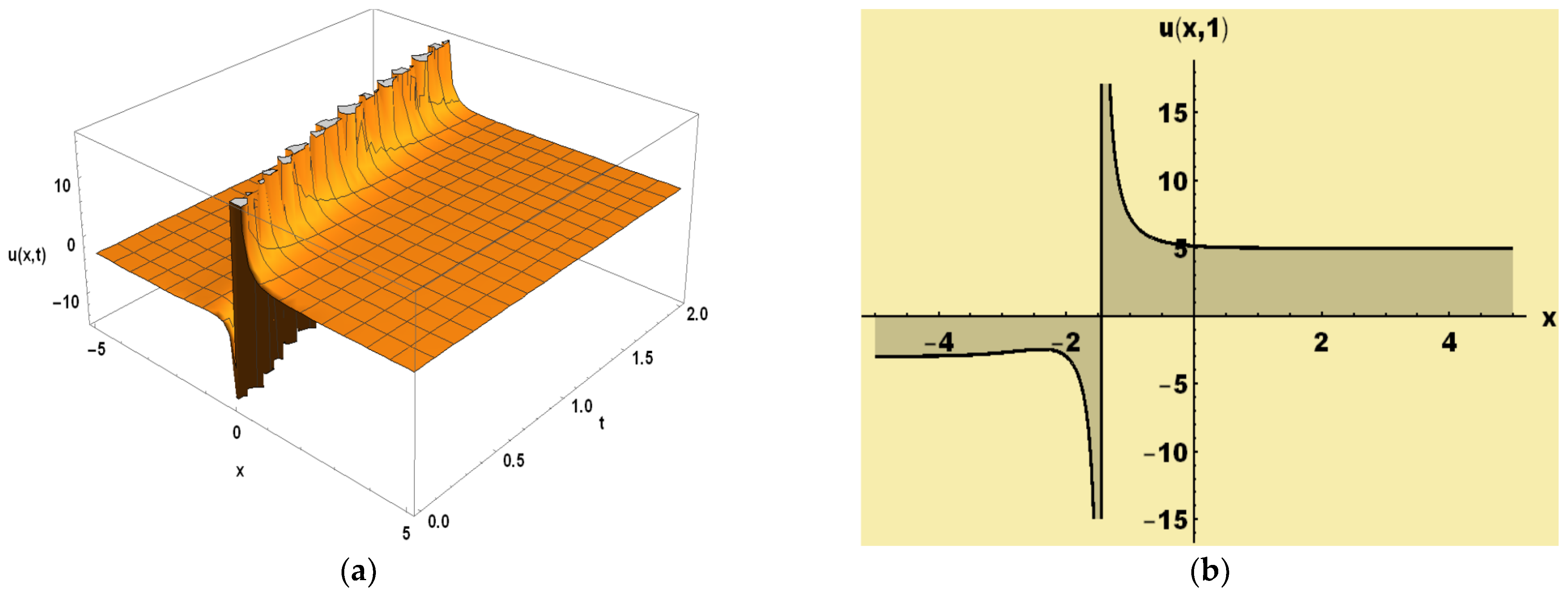
The found solution of the time fractional simplified MCH equation was described in this section. We get the travelling wave solutions assembled from Equations (19)–(27) to the time fractional simplified MCH equation using the novel (G′/G2)-expansion approach. The time-fractional order for the equations is changed in order to study graphical behaviors of the exact solutions chosen from the preceding section. Mainly, the value of the time-fractional order used for the following simulations is . Solutions and of Equation (13) are selected to present in terms of 3D, and 2D plots according to the values of The 3D solution graphs of and are portrayed on the domain of on the domain of on the domain of on the domain and of on the domain respectively.
The 2D solution graphs, representing a relation among
u(
x) and
x, of
is represented on
of
and
on
of
on
of
on
and of
on
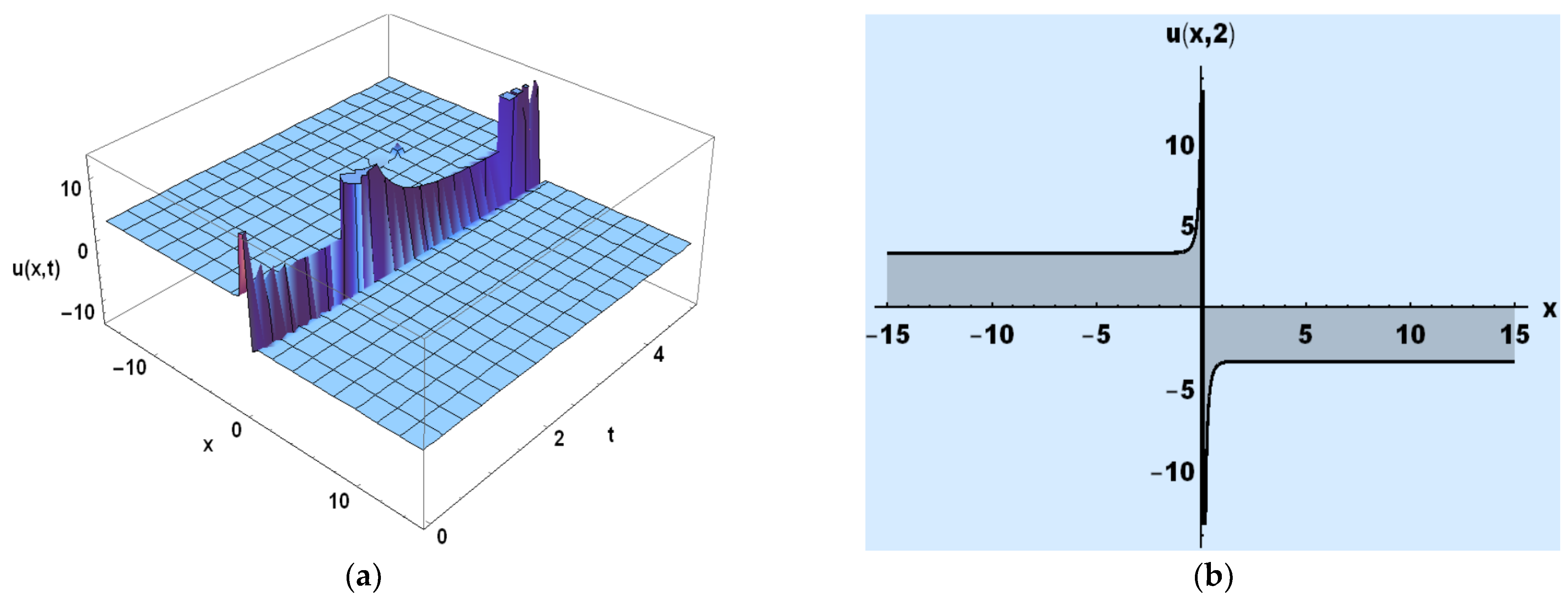
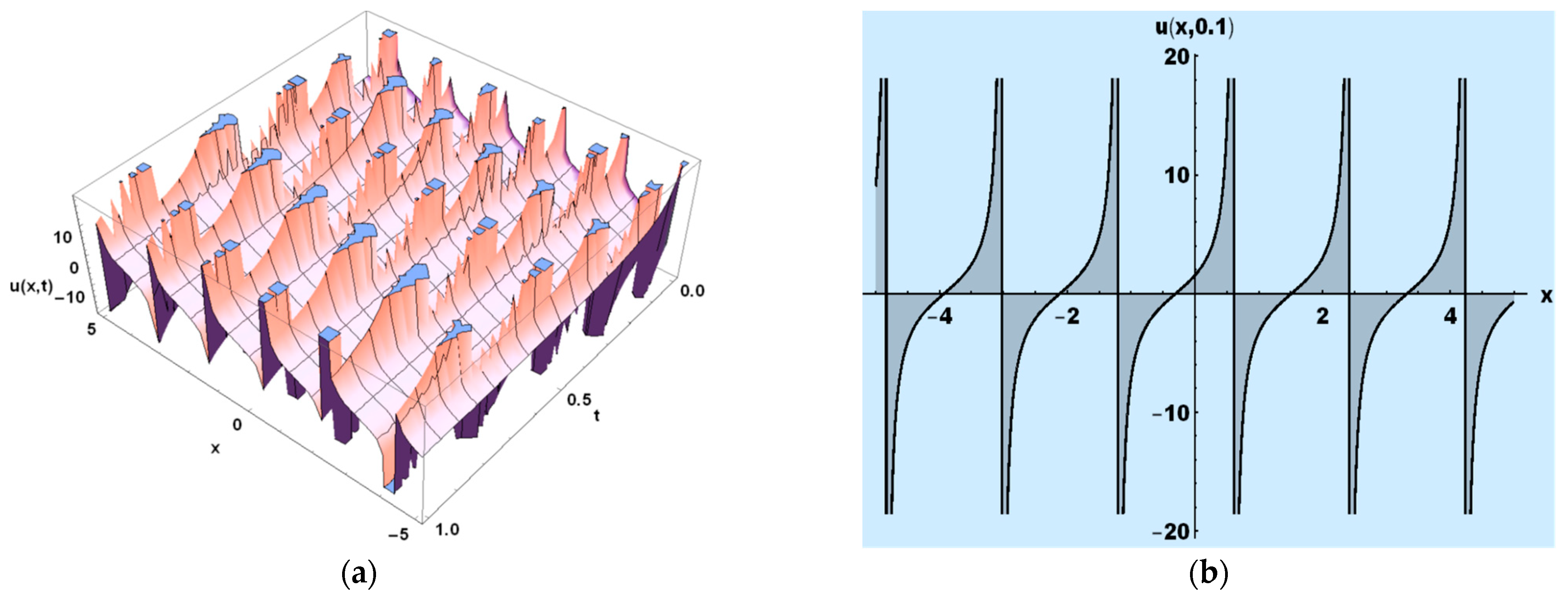
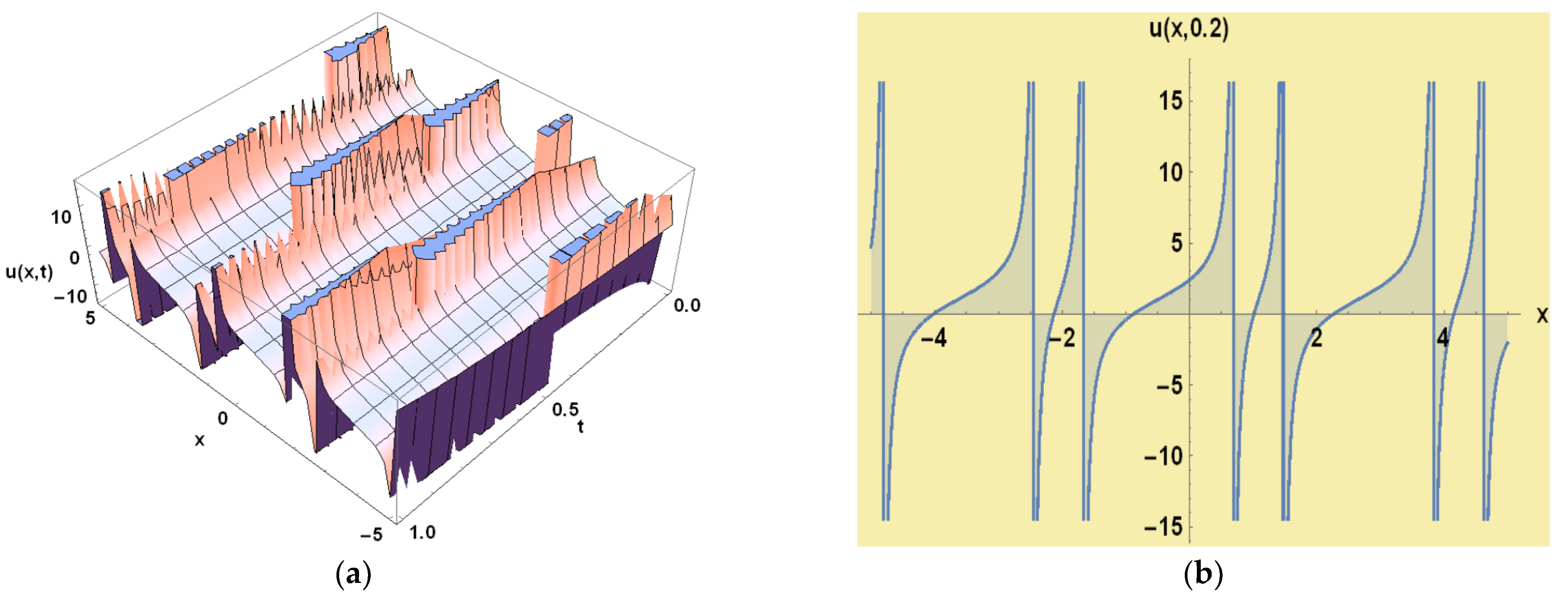
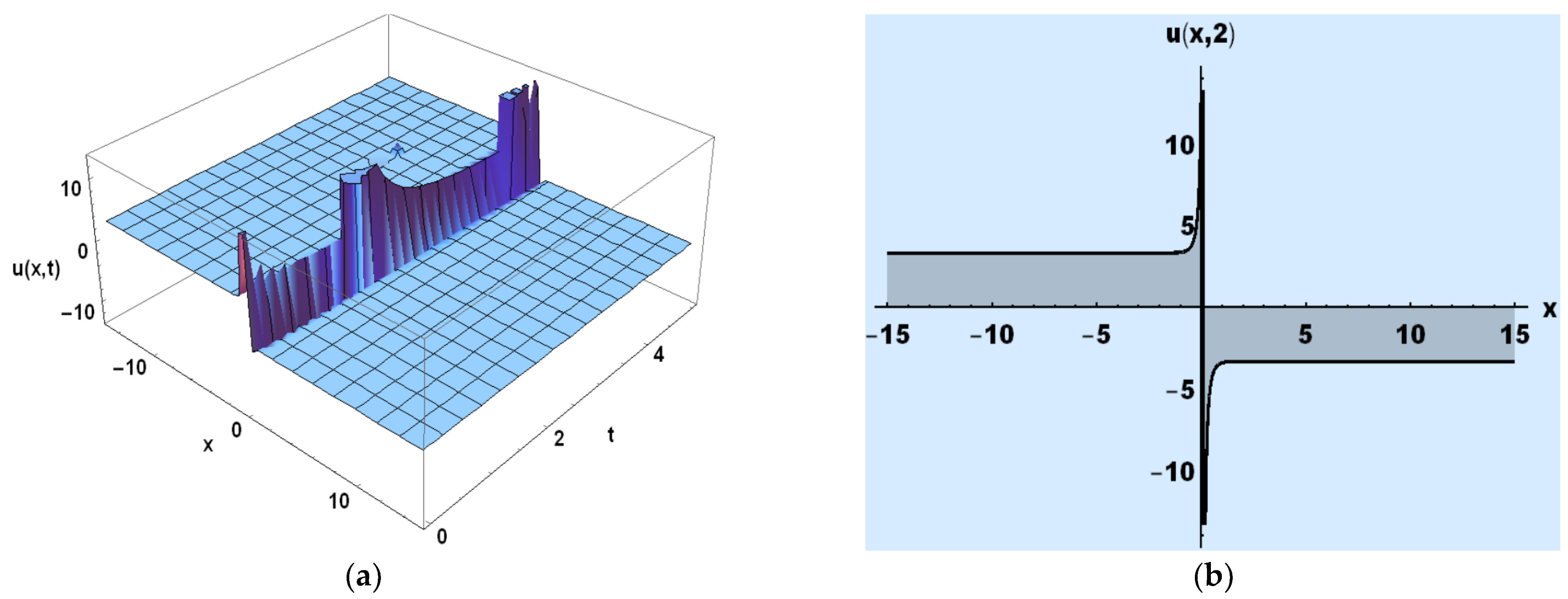
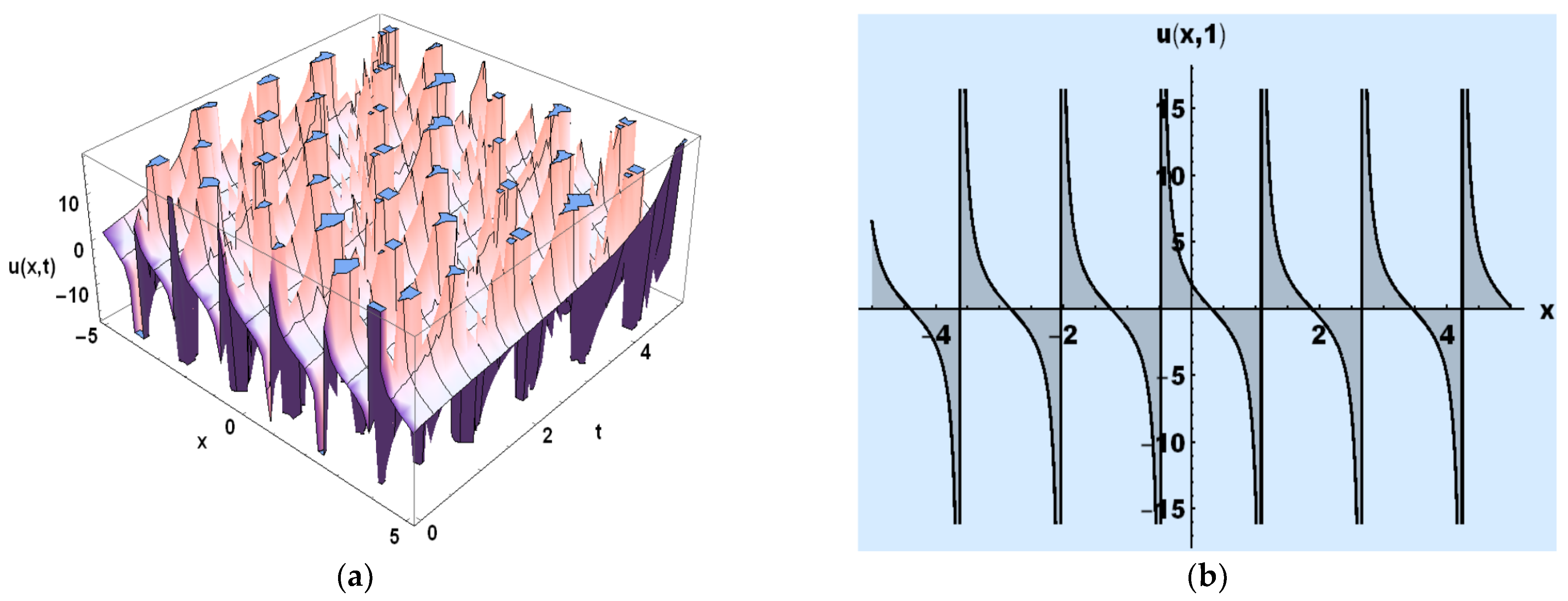
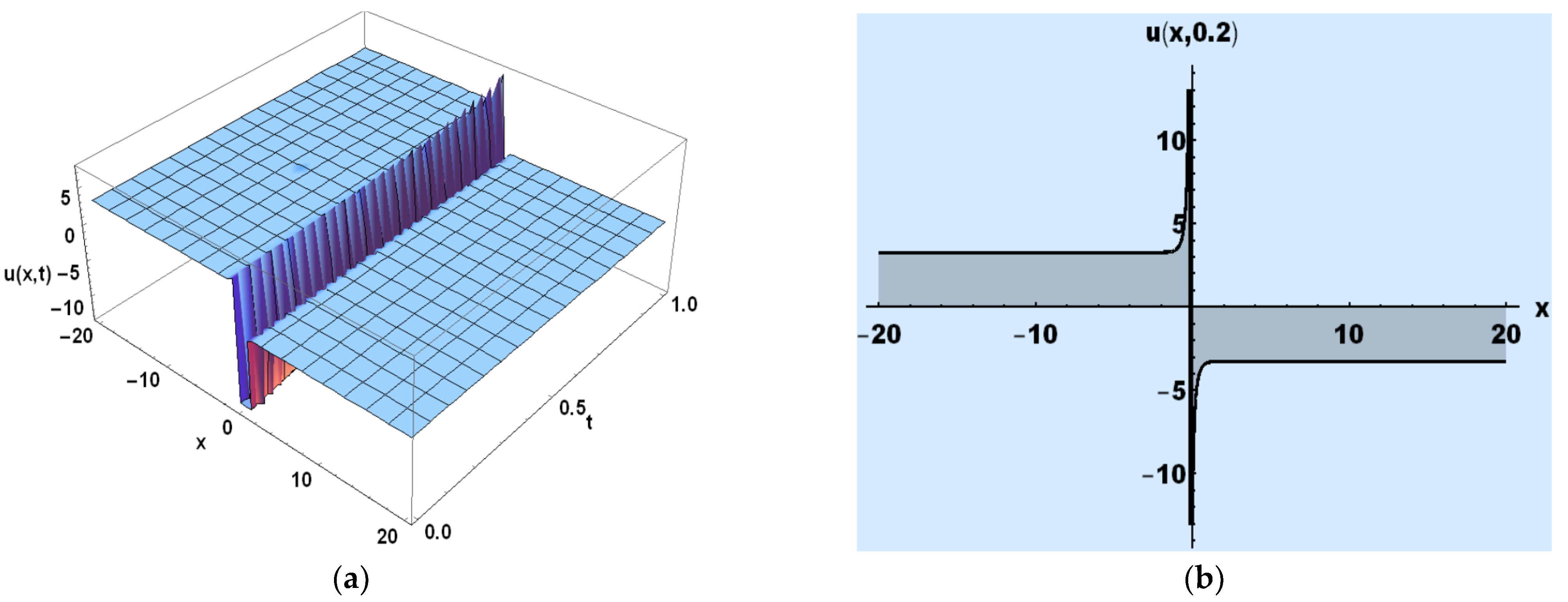
respectively. The solutions are singular periodic wave solution, and singular kink shape soliton, which are all generic solitary wave solutions. The solutions (19), (22) and (25) provide singular periodic wave solutions while, the solutions (20), (23), and (26) provide singular kink shape wave solutions, and the solutions (21), (24), and (27) provide rational solutions, according to the aforementioned solutions.
Figure 1a,b represents the singular periodic wave solution, which is spatiotemporal oscillations with discontinuous derivatives of
in Equation (19) for the parameters values
in 3D and 2D. The
Figure 2a,b and
Figure 3a,b are similar to
Figure 1a,b for different values of the parameters.
Figure 4a,b represents the 3-dimensional and 2-dimensional singular kink wave solution
in Equation (20) for the parameters values
.
Figure 5a,b and
Figure 6a,b are similar to
Figure 4a,b for different values of the parameters.
Comparison between our obtained solutions and the Liu et al. solutions [
34].
| Our Obtained Solutions | Liu et al. Solutions [34] |
and then our solution becomes: |
If we put and
in then
|
If
and
then our solution
becomes:
|
If we put and
in
then
|
If
and
then our solution
becomes:
|
If we put and
in
then
|
If
and
then our solution
becomes:
|
If we put and
in
then
|
5. Conclusions
The time fractional simplified MCH problem is solved using a novel (G′/G2)-expansion method. Following the elimination of the trivial and excluded solutions, Equation (13) provides three types of solutions: trigonometric, exponential, and rational function solutions. The Maple software package was used to replace all of the exact answers created in this work back into their respective equations, and their fulfilment validated the correctness of the solutions provided in the current paper. After illustrating the graphs of numerous solutions for the value of they demonstrate physical properties such as the singular periodic wave solutions, and singular kink wave solutions. The solutions’ features make them ideal for analyzing nonlinear processes in applied math, physics, and engineering. A soliton, for example, is a self-reinforcing wave packet that maintains its shape while propagating at a constant rate. Solitons, in other words, are unaffected by collisions with other solitons in terms of shape and speed, and are studied in nuclear physics, quantum mechanics, and waves along a weakly anharmonic mass-spring chain. Singular periodic travelling waves, among other things, play a role in self-oscillatory systems, reaction–diffusion–advection systems, and excitable chemical reactions. To conclusion, the method produces some truly unusual forms of solutions, and its performance is clear, direct, dependable, and successful. The limitation of the proposed method is that, it depends on the value of arbitrary constant H which can be calculated when the transformed ODE contains the constant of integration. As a result, we conclude that the provided approach can be used to address a wide range of NPDEs emerging in solitons theory or other physics and engineering areas. Finally, future research could benefit from applying the novel(G′/G2)-expansion approach to the proposed challenges involving an extension to the NLEEs involving sequential fractional partial derivatives.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}