
Joint Optimization of Route and Speed for Methanol Dual-Fuel Powered Ships Based on Improved Genetic Algorithm


Abstract
1. Introduction
2. Literature Review
3. Problem Description
4. Mathematical Model
4.1. Model Assumptions
4.2. Model Variables and Parameters
4.3. Ship Sailing Total Costs
4.3.1. Ship Fuel Consumption Cost
4.3.2. Time Cost
4.3.3. Carbon Emissions Cost
4.3.4. Constraint Conditions of the Model
4.3.5. Objective Model
5. Solution Method
5.1. Model Analysis
5.2. Algorithm Overview
5.3. Model Reformulation
5.4. Solution Steps
6. Case Studies
6.1. Definition of Cases
6.2. Results and Discussion
6.3. Comparative Experiment
6.4. Sensitivity Analysis
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IMO 2020—Cutting Sulphur Oxide Emissions. Available online: https://www.imo.org/en/MediaCentre/HotTopics/Pages/Sulphur-2020.aspx (accessed on 6 June 2024).
- IMO. Historic Background—IMO GHG Studies. 2021. Available online: https://www.imo.org/en/OurWork/Environment/Pages/Historic%20Background%20GHG.aspx (accessed on 27 September 2024).
- IMO. Marine Environment Protection Committee (MEPC), 63rd Session, 27 February to 2 March. 2012. Available online: https://www.imo.org/en/MediaCentre/MeetingSummaries/Pages/MEPC-63rd-session.aspx (accessed on 27 September 2024).
- REUTERS. EU Proposes Adding Shipping to Its Carbon Trading Market. 2021. Available online: https://www.reuters.com/business/sustainable-business/eu-proposes-adding-shipping-its-carbon-trading-market-2021-07-14/ (accessed on 27 September 2024).
- Wu, M. Carbon Emission Trading Scheme in the shipping sector: Drivers, challenges, and impacts. Mar. Policy 2022, 138, 104989. [Google Scholar]
- Brynolf, S.; Fridell, E.; Andersson, K. Environmental assessment of marine fuels: Liquefied natural gas, liquefied biogas, methanol and bio-methanol. J. Clean. Prod. 2014, 74, 86–95. [Google Scholar]
- Bilgili, L. A systematic review on the acceptance of alternative marine fuels. Renew. Sustain. Energy Rev. 2023, 182, 113367. [Google Scholar] [CrossRef]
- Hansson, J.; Månsson, S.; Brynolf, S.; Grahn, M. Alternative marine fuels: Prospects based on multi-criteria decision analysis involving Swedish stakeholders. Biomass Bioenergy 2019, 126, 159–173. [Google Scholar]
- Xing, H.; Stuart, C.; Spence, S.; Chen, H. Alternative fuel options for low carbon maritime transportation: Pathways to 2050. J. Clean. Prod. 2021, 297, 126651. [Google Scholar]
- Strazza, C.; Del Borghi, A.; Costamagna, P.; Traverso, A.; Santin, M.J.A.E. Comparative LCA of methanol-fuelled SOFCs as auxiliary power systems on-board ships. Appl. Energy 2010, 87, 1670–1678. [Google Scholar]
- McKinlay, C.J.; Turnock, S.R.; Hudson, D.A. Route to zero emission shipping: Hydrogen, ammonia or methanol? Int. J. Hydrogen Energy 2021, 46, 28282–28297. [Google Scholar]
- Rouwenhorst, K.H.R.; Van der Ham, A.G.; Mul, G.; Kersten, S.R. Islanded ammonia power systems: Technology review & conceptual process design. Renew. Sustain. Energy Rev. 2019, 114, 109339. [Google Scholar]
- Parris, D.; Spinthiropoulos, K.; Ragazou, K.; Giovou, A.; Tsanaktsidis, C. Methanol, a Plugin Marine Fuel for Green House Gas Reduction—A Review. Energies 2024, 17, 605. [Google Scholar] [CrossRef]
- Clarksons Research. Shipping Review Outlook; Clarkson Research Services: Ledbury, UK, 2023. [Google Scholar]
- Gao, T.; Tian, J.; Liu, C.; Huang, C.; Wu, H.; Yuan, Z. A model for speed and fuel refueling strategy of methanol dual-fuel liners with emission control areas. Transp. Policy 2025, 161, 1–16. [Google Scholar]
- Ronen, D. The effect of oil price on containership speed and fleet size. J. Oper. Res. Soc. 2011, 62, 211–216. [Google Scholar]
- Zhang, J.; Yang, T.; Ma, W. Ship speed optimization based on multi-objective particle swarm algorithm. J. Syst. Simul. 2019, 31, 787–794. [Google Scholar]
- Tzortzis, G.; Sakalis, G. A dynamic ship speed optimization method with time horizon segmentation. Ocean Eng. 2021, 226, 108840. [Google Scholar]
- Hua, R.; Yin, J.; Wang, S.; Han, Y.; Wang, X. Speed optimization for maximizing the ship’s economic benefits considering the Carbon Intensity Indicator (CII). Ocean Eng. 2024, 293, 116712. [Google Scholar]
- Luo, X.; Yan, R.; Wang, S. Ship sailing speed optimization considering dynamic meteorological conditions. Transp. Res. Part C Emerg. Technol. 2024, 167, 104827. [Google Scholar] [CrossRef]
- Marashian, A.; Böling, J.M.; Razminia, A.; Hyvönen, J.; Vettor, R.; Gustafsson, W.; Pirttikangas, M.; Björkqvist, J. Combined engine conFiguration and speed optimization for fuel savings on cruise ships. Ocean Eng. 2025, 322, 120387. [Google Scholar]
- Huotari, J.; Manderbacka, T.; Ritari, A.; Tammi, K. Convex optimisation model for ship speed profile: Optimisation under fixed schedule. J. Mar. Sci. Eng. 2021, 9, 730. [Google Scholar] [CrossRef]
- Zincir, B. Slow steaming application for short-sea shipping to comply with the CII regulation. Brodogr. Int. J. Nav. Archit. Ocean Eng. Res. Dev. 2023, 74, 21–38. [Google Scholar]
- Taskar, B.; Sasmal, K.; Yiew, L.J. A case study for the assessment of fuel savings using speed optimization. Ocean Eng. 2023, 274, 113990. [Google Scholar]
- Luo, X.; Yan, R.; Wang, S. Comparison of deterministic and ensemble weather forecasts on ship sailing speed optimization. Transp. Res. Part D Transp. Environ. 2023, 121, 103801. [Google Scholar]
- Li, X.; Sun, B.; Jin, J.; Ding, J. Ship speed optimization method combining Fisher optimal segmentation principle. Appl. Ocean Res. 2023, 140, 103743. [Google Scholar] [CrossRef]
- Tsou, M.-C. Integration of a geographic information system and evolutionary computation for automatic routing in coastal navigation. J. Navig. 2010, 63, 323–341. [Google Scholar] [CrossRef]
- Szlapczynska, J.; Szlapczynski, R. Preference-based evolutionary multi-objective optimization in ship weather routing. Appl. Soft Comput. 2019, 84, 105742. [Google Scholar] [CrossRef]
- Wei, S.; Zhou, P. 23. Development of a 3D Dynamic Programming Method for Weather Routing. In Methods and Algorithms in Navigation: Marine Navigation and Safety of Sea Transportation; CRC Press: Boca Raton, FL, USA, 2011; p. 181. [Google Scholar]
- Chang, Y.-C.; Tseng, R.S.; Chen, G.Y.; Chu, P.C.; Shen, Y.T. Ship routing utilizing strong ocean currents. J. Navig. 2013, 66, 825–835. [Google Scholar] [CrossRef]
- Ma, W.; Han, Y.; Tang, H.; Ma, D.; Zheng, H.; Zhang, Y. Ship route planning based on intelligent mapping swarm optimization. Comput. Ind. Eng. 2023, 176, 108920. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, L.; Zhang, X.; Lv, W. Jointly optimizing ocean shipping routes and sailing speed while considering involuntary and voluntary speed loss. Ocean Eng. 2022, 245, 110460. [Google Scholar] [CrossRef]
- Cheng, L.; Xu, L.; Bai, X. Cargo selection, route planning, and speed optimization in tramp shipping under carbon intensity indicator (CII) regulations. Transp. Res. Part E Logist. Transp. Rev. 2025, 194, 103948. [Google Scholar] [CrossRef]
- Lashgari, M.; Akbari, A.A.; Nasersarraf, S. A new model for simultaneously optimizing ship route, sailing speed, and fuel consumption in a shipping problem under different price scenarios. Appl. Ocean Res. 2021, 113, 102725. [Google Scholar] [CrossRef]
- Ma, D.; Ma, W.; Jin, S.; Ma, X. Method for simultaneously optimizing ship route and speed with emission control areas. Ocean Eng. 2020, 202, 107170. [Google Scholar] [CrossRef]
- Ma, W.; Lu, T.; Ma, D.; Wang, D.; Qu, F. Ship route and speed multi-objective optimization considering weather conditions and emission control area regulations. Marit. Policy Manag. 2021, 48, 1053–1068. [Google Scholar] [CrossRef]
- Ma, W.; Ma, D.; Ma, Y.; Zhang, J.; Wang, D. Green maritime: A routing and speed multi-objective optimization strategy. J. Clean. Prod. 2021, 305, 127179. [Google Scholar]
- Ma, D.; Ma, W.; Hao, S.; Jin, S.; Qu, F. Ship’s response to low-sulfur regulations: From the perspective of route, speed and refueling strategy. Comput. Ind. Eng. 2021, 155, 107140. [Google Scholar]
- Zhen, L.; Hu, Z.; Yan, R.; Zhuge, D.; Wang, S. Route and speed optimization for liner ships under emission control policies. Transp. Res. Part C Emerg. Technol. 2020, 110, 330–345. [Google Scholar] [CrossRef]
- Wan, S.; Li, S.; Chen, Z.; Tang, Y. An ultrasonic-AI hybrid approach for predicting void defects in concrete-filled steel tubes via enhanced XGBoost with Bayesian optimization. Case Stud. Constr. Mater. 2025, 22, e04359. [Google Scholar] [CrossRef]
- Nong, Y.; Chen, Z.; Chen, Y.; Tang, Y.; Wang, Y.; Liu, K.; Qin, M. Molecular insights into the effect of adsorption and reaction of H2O-O2-Cl- on initial electrochemical corrosion of steel. Electrochim. Acta 2025, 511, 145385. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, W.; Fu, K.; Wang, F.; Wu, X.; Zhao, C.; Shen, C.; Yu, Z.; Tang, Y. Analytical Model and Optimization of Joint Systems in Modular Precast Foundations for Onshore Wind Turbines. Buildings 2024, 14, 3952. [Google Scholar] [CrossRef]
- Omer, M.; Lijie, G.; Yunchao, T.; Okasha, N.M.; Azimi, S.J.; Namdar, A.; Azhar, F. The displacement mechanism of the cracked rock—A seismic design and prediction study using XFEM and ANNs. Adv. Model. Simul. Eng. Sci. 2024, 11, 4. [Google Scholar]
- Tan, R.; Duru, O.; Thepsithar, P. Assessment of relative fuel cost for dual fuel marine engines along major Asian container shipping routes. Transp. Res. Part E Logist. Transp. Rev. 2020, 140, 102004. [Google Scholar] [CrossRef]
- He, P.; Jin, J.G.; Pan, W.; Chen, J. Route, speed, and bunkering optimization for LNG-fueled tramp ship with alternative bunkering ports. Ocean Eng. 2024, 305, 117957. [Google Scholar]
- Drozhzhyn, O.; Koskina, Y.; Tykhonina, I. “Liner shipping”: The evolution of the concept. Pomorstvo 2021, 35, 365–371. [Google Scholar]
- Raza, Z.; Woxenius, J.; Vural, C.A.; Lind, M. Digital transformation of maritime logistics: Exploring trends in the liner shipping segment. Comput. Ind. 2023, 145, 103811. [Google Scholar] [CrossRef]
- Sun, Y.; Zheng, J.; Yang, L.; Li, X. Allocation and trading schemes of the maritime emissions trading system: Liner shipping route choice and carbon emissions. Transp. Policy 2024, 148, 60–78. [Google Scholar] [CrossRef]
- Chen, J.; Ye, J.; Zhuang, C.; Qin, Q.; Shu, Y. Liner shipping alliance management: Overview and future research directions. Ocean Coast. Manag. 2022, 219, 106039. [Google Scholar]
- Ma, W.; Hao, S.; Ma, D.; Wang, D.; Jin, S.; Qu, F. Scheduling decision model of liner shipping considering emission control areas regulations. Appl. Ocean Res. 2021, 106, 102416. [Google Scholar]
- Wang, C.; Xu, C. Sailing speed optimization in voyage chartering ship considering different carbon emissions taxation. Comput. Ind. Eng. 2015, 89, 108–115. [Google Scholar]
- Drube, T.K.; Gerlach, J.M.; Leach, T.S.; Vogel, B.; Klebanoff, L.E. Exploring variations in the weight, size and shape of liquid hydrogen tanks for zero-emission fuel-cell vessels. Int. J. Hydrogen Energy 2024, 80, 1441–1465. [Google Scholar]
- Kronqvist, J.; Bernal, D.E.; Lundell, A.; Grossmann, I.E. A review and comparison of solvers for convex MINLP. Optim. Eng. 2019, 20, 397–455. [Google Scholar]
- Epelle, E.I.; Gerogiorgis, D.I. A computational performance comparison of MILP vs. MINLP formulations for oil production optimisation. Comput. Chem. Eng. 2020, 140, 106903. [Google Scholar]
- Mogale, D.G.; Kumar, S.K.; Tiwari, M.K. An MINLP model to support the movement and storage decisions of the Indian food grain supply chain. Control Eng. Pract. 2018, 70, 98–113. [Google Scholar] [CrossRef]
- Vladov, S. Cognitive Method for Synthesising a Fuzzy Controller Mathematical Model Using a Genetic Algorithm for Tuning. Big Data Cogn. Comput. 2025, 9, 17. [Google Scholar] [CrossRef]
- Tynchenko, V.; Lomazov, A.; Lomazov, V.; Evsyukov, D.; Nelyub, V.; Borodulin, A.; Gantimurov, A.; Malashin, I. Adaptive Management of Multi-Scenario Projects in Cybersecurity: Models and Algorithms for Decision-Making. Big Data Cogn. Comput. 2024, 8, 150. [Google Scholar] [CrossRef]
- Malashin, I.; Masich, I.; Tynchenko, V.; Nelyub, V.; Borodulin, A.; Gantimurov, A. Application of Natural Language Processing and Genetic Algorithm to Fine-Tune Hyperparameters of Classifiers for Economic Activities Analysis. Big Data Cogn. Comput. 2024, 8, 68. [Google Scholar] [CrossRef]
- Fleszar, K. A branch-and-bound algorithm for the quadratic multiple knapsack problem. Eur. J. Oper. Res. 2022, 298, 89–98. [Google Scholar] [CrossRef]
- Jiao, H.; Wang, W.; Shang, Y. Outer space branch-reduction-bound algorithm for solving generalized affine multiplicative problems. J. Comput. Appl. Math. 2023, 419, 114784. [Google Scholar] [CrossRef]
- Gupta, O.K.; Ravindran, A. Branch and bound experiments in convex nonlinear integer programming. Manag. Sci. 1985, 31, 1533–1546. [Google Scholar] [CrossRef]
- Bonami, P.; Biegler, L.T.; Conn, A.R.; Cornuéjols, G.; Grossmann, I.E.; Laird, C.D.; Lee, J.; Lodi, A.; Margot, F.; Sawaya, N.; et al. An algorithmic framework for convex mixed integer nonlinear programs. Discret. Optim. 2008, 5, 186–204. [Google Scholar] [CrossRef]
- Billionnet, A.; Elloumi, S.; Lambert, A. A branch and bound algorithm for general mixed-integer quadratic programs based on quadratic convex relaxation. J. Comb. Optim. 2014, 28, 376–399. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Regulations | Requirements | Application Area |
|---|---|---|
| ECAs | Ships must use fuels with a sulfur content of no more than 0.1% | Baltic Sea, North Sea and English Channel, North American, US Caribbean coasts, China coasts, Specific ports of South Korea |
| SLO | Ships must use fuels with a sulfur content of no more than 0.5% | Outside the ECA applicable area |
| CTS | Ships need to pay tax on carbon dioxide above a certain threshold. | Europe |
| Port Number | Ports | Service Time/Days |
|---|---|---|
| 1 | Tianjin | 2.0 |
| 2 | Weihai | 2.5 |
| 3 | Lianyungang | 3.0 |
| 4 | Busan | 2.0 |
| 5 | Kaohsiung | 1.0 |
| 6 | Manila | 1.5 |
| 7 | Bintulu | 2.5 |
| 8 | Singapore | 2.5 |
| 9 | Shenzhen | 1.5 |
| 10 | Shanghai | 2.0 |
| 1 | Tianjin | 1.0 |
| Ports | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 216 | 490 | 685 | 1187 | 1735 | 2425 | 2749 | 1396 | 632 |
| 2 | 216 | 0 | 269 | 453 | 961 | 1507 | 2191 | 2533 | 1180 | 414 |
| 3 | 490 | 269 | 0 | 490 | 813 | 1340 | 2039 | 2388 | 1033 | 271 |
| 4 | 685 | 453 | 490 | 0 | 898 | 1400 | 2113 | 2498 | 1124 | 437 |
| 5 | 1187 | 961 | 813 | 898 | 0 | 552 | 1142 | 1608 | 336 | 57 |
| 6 | 1735 | 1507 | 1340 | 1400 | 552 | 0 | 834 | 1293 | 623 | 1089 |
| 7 | 2425 | 2191 | 2039 | 2113 | 1142 | 834 | 0 | 555 | 1148 | 1783 |
| 8 | 2749 | 2533 | 2388 | 2498 | 1608 | 1293 | 555 | 0 | 1413 | 2130 |
| 9 | 1396 | 1180 | 1033 | 1124 | 336 | 623 | 1148 | 1413 | 0 | 777 |
| 10 | 632 | 414 | 271 | 437 | 557 | 1089 | 1783 | 2130 | 777 | 0 |
| Parameters | Symbols | Value |
|---|---|---|
| Ship displacement (ton) | W | 55,000 |
| Admiralty constant | B | 250 |
| Power index in fuel consumption function | ω | 3.5 |
| The price of methanol bunkering for ships (USD) | PM | 350 |
| The price of LSFO bunkering for ships (USD) | PL | 800 |
| Lower limit of ship’s sailing speed (kn) | vmin | 15 |
| Upper limit of ship’s sailing speed (kn) | vmax | 25 |
| Daily cost of the ship (USD/day) | τ | 8000 |
| Ship engine energy consumption rate of LSFO (g/kwh) | ηL | 170.5 |
| Lower calorific values of methanol (MJ/kg) | LCM | 22.7 |
| Lower calorific values of LSFO (MJ/kg) | LCL | 41.8 |
| Methanol tank capacity (ton) | QM | 1000 |
| Fuel oil tank capacity (ton) | QL | 2000 |
| CO2 emission factor of methanol | EFMCO2 | 1.50 |
| CO2 emission factor of LSFO | EFLCO2 | 3.30 |
| SOx emission factor of methanol | EFMSOx | 0 |
| SOx emission factor of LSFO | EFLSOx | 0.011 |
| NOx emission factor of methanol | EFMNOx | 0.013 |
| NOx emission factor of LSFO | EFLNOx | 0.101 |
| PM emission factor of methanol | EFMPM | 0 |
| PM emission factor of LSFO | EFLPM | 0.003 |
| CO emission factor of methanol | EFMCO | 0.014 |
| CO emission factor of LSFO | EFLCO | 0.006 |
| Cases | Methanol Tank Capacity (Ton) | Total Cost (USD) |
|---|---|---|
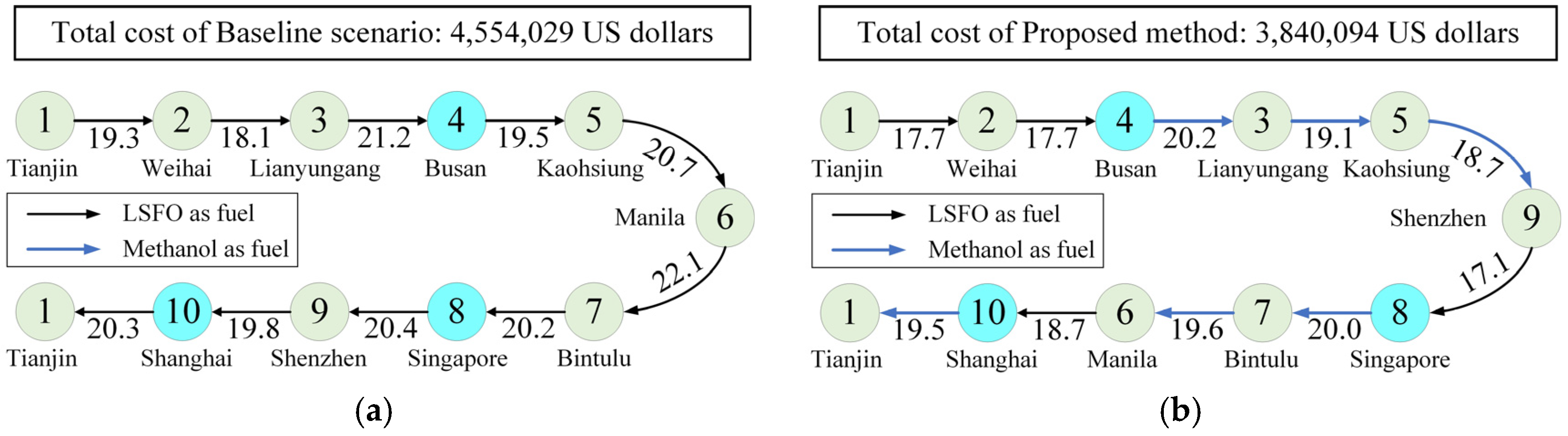
| 1 | 1000 | 3,840,094 |
| 2 | 1500 | 3,582,746 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Zhang, H.; Zhang, J.; Wu, B. Joint Optimization of Route and Speed for Methanol Dual-Fuel Powered Ships Based on Improved Genetic Algorithm. Big Data Cogn. Comput. 2025, 9, 90. https://doi.org/10.3390/bdcc9040090
Li Z, Zhang H, Zhang J, Wu B. Joint Optimization of Route and Speed for Methanol Dual-Fuel Powered Ships Based on Improved Genetic Algorithm. Big Data and Cognitive Computing. 2025; 9(4):90. https://doi.org/10.3390/bdcc9040090
Chicago/Turabian StyleLi, Zhao, Hao Zhang, Jinfeng Zhang, and Bo Wu. 2025. "Joint Optimization of Route and Speed for Methanol Dual-Fuel Powered Ships Based on Improved Genetic Algorithm" Big Data and Cognitive Computing 9, no. 4: 90. https://doi.org/10.3390/bdcc9040090
APA StyleLi, Z., Zhang, H., Zhang, J., & Wu, B. (2025). Joint Optimization of Route and Speed for Methanol Dual-Fuel Powered Ships Based on Improved Genetic Algorithm. Big Data and Cognitive Computing, 9(4), 90. https://doi.org/10.3390/bdcc9040090