
Reduction of Aerial Image Misalignment in Face-to-Face 3D Aerial Display

Abstract
1. Introduction
2. Conventional Method
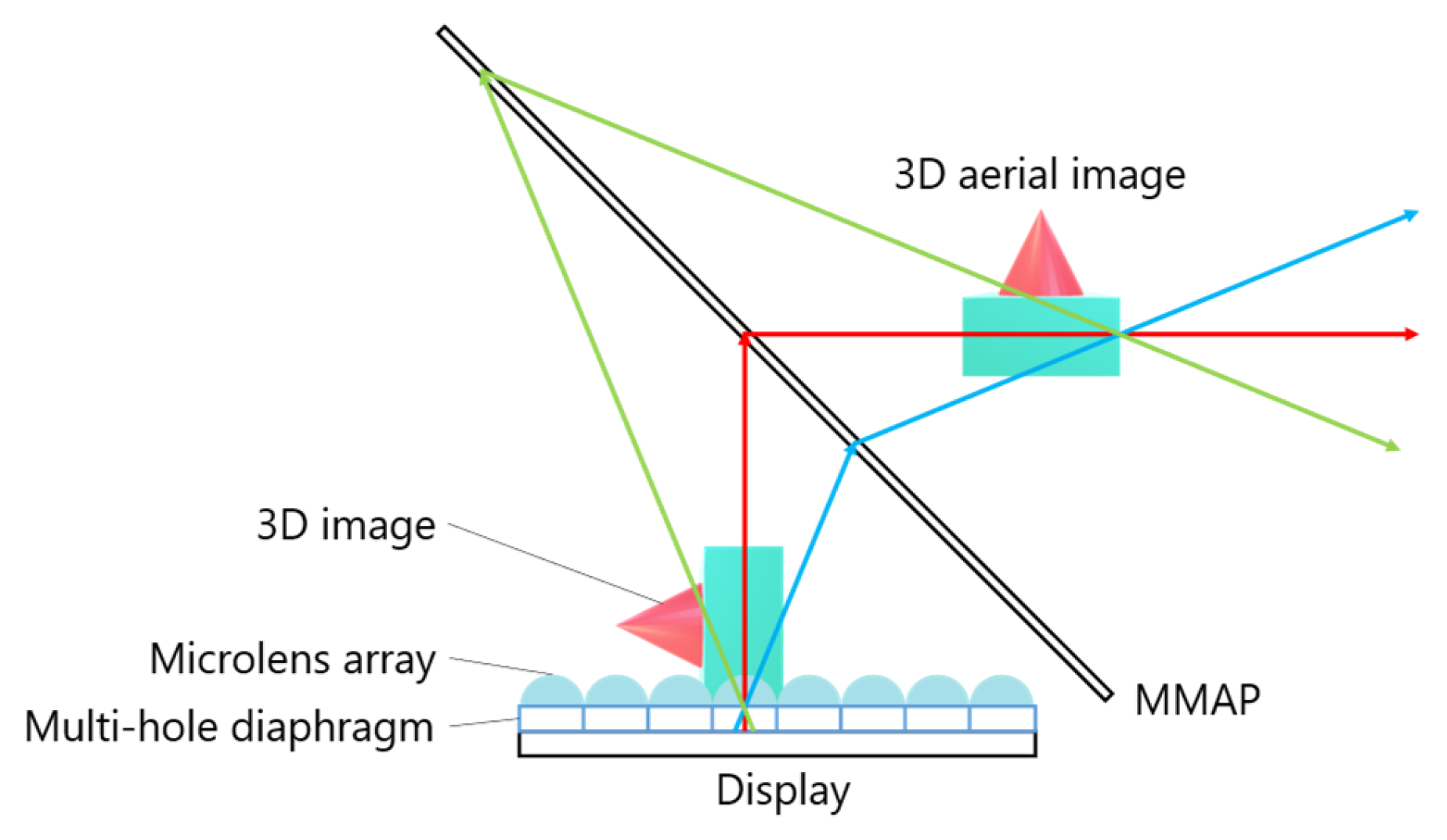
2.1. The Principle of MMAP
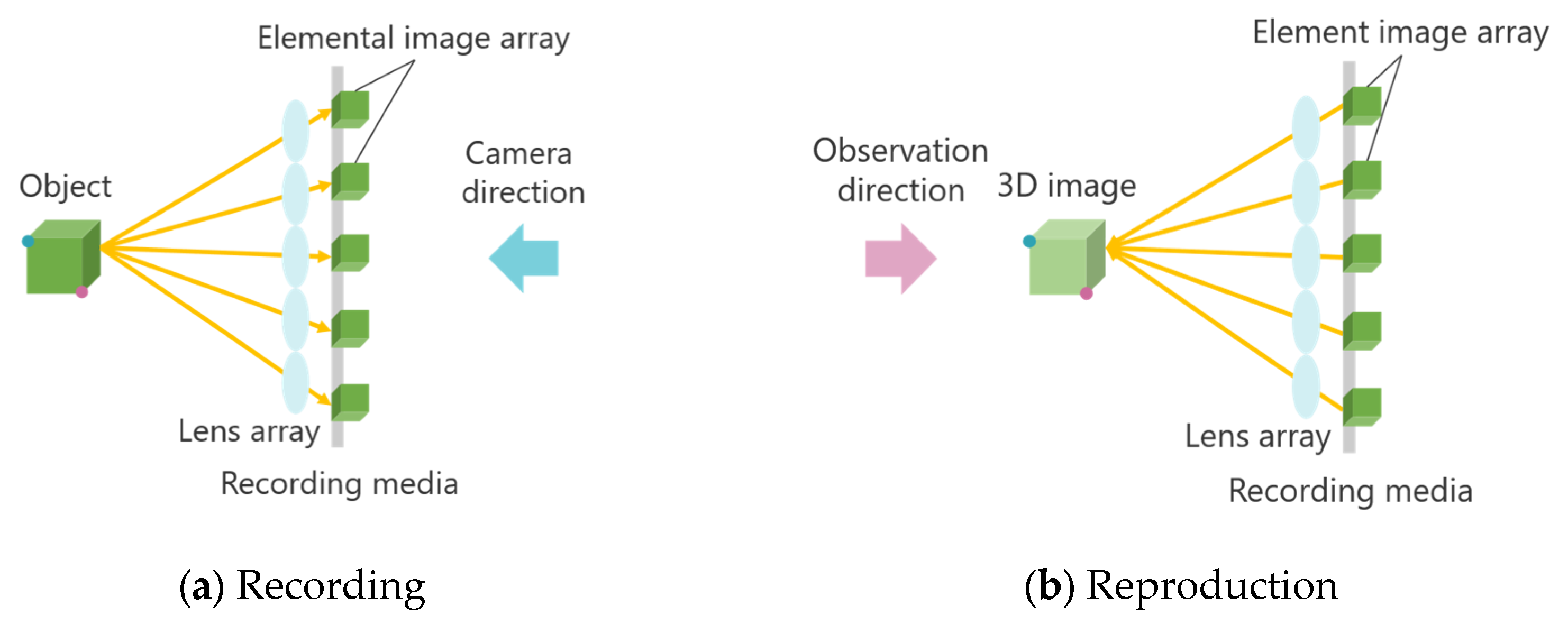
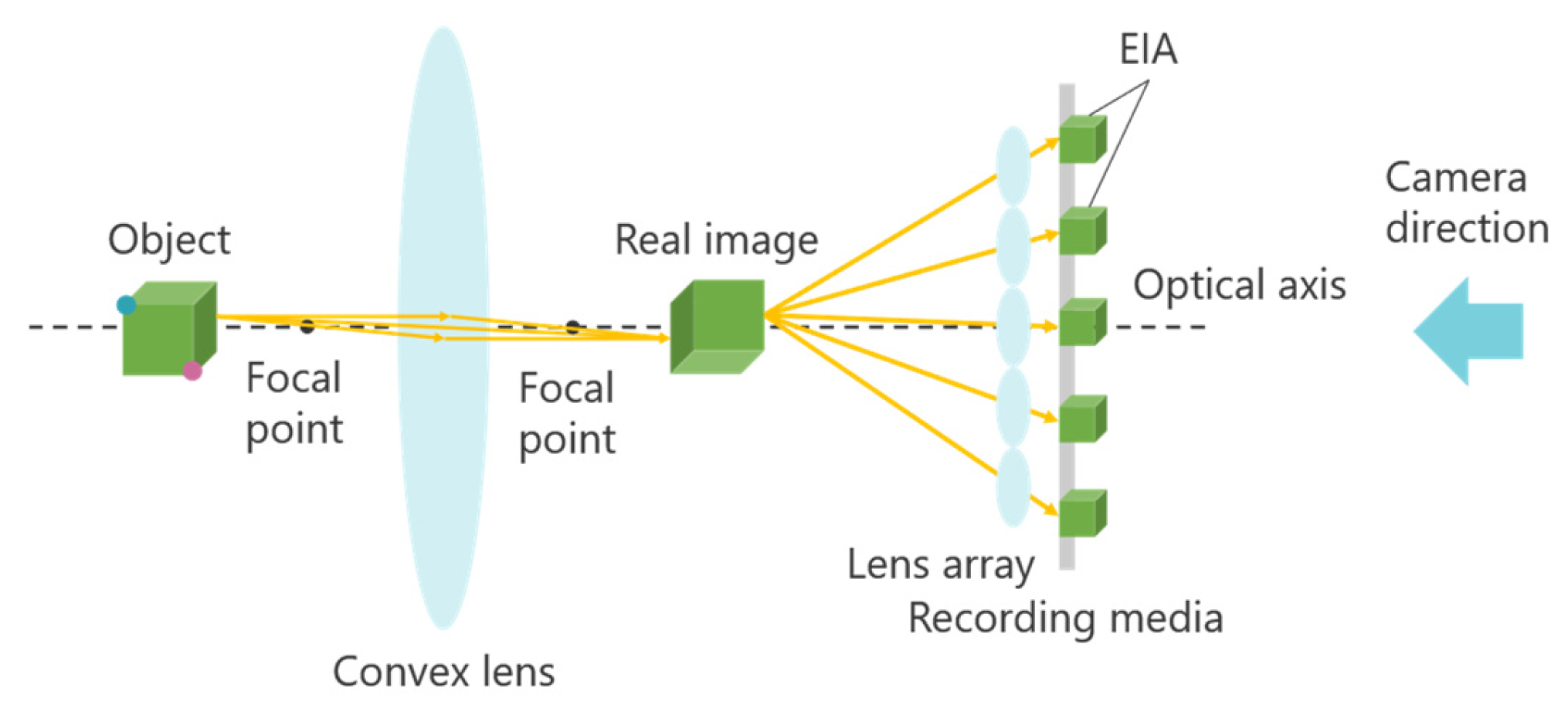
2.2. Integral Photography
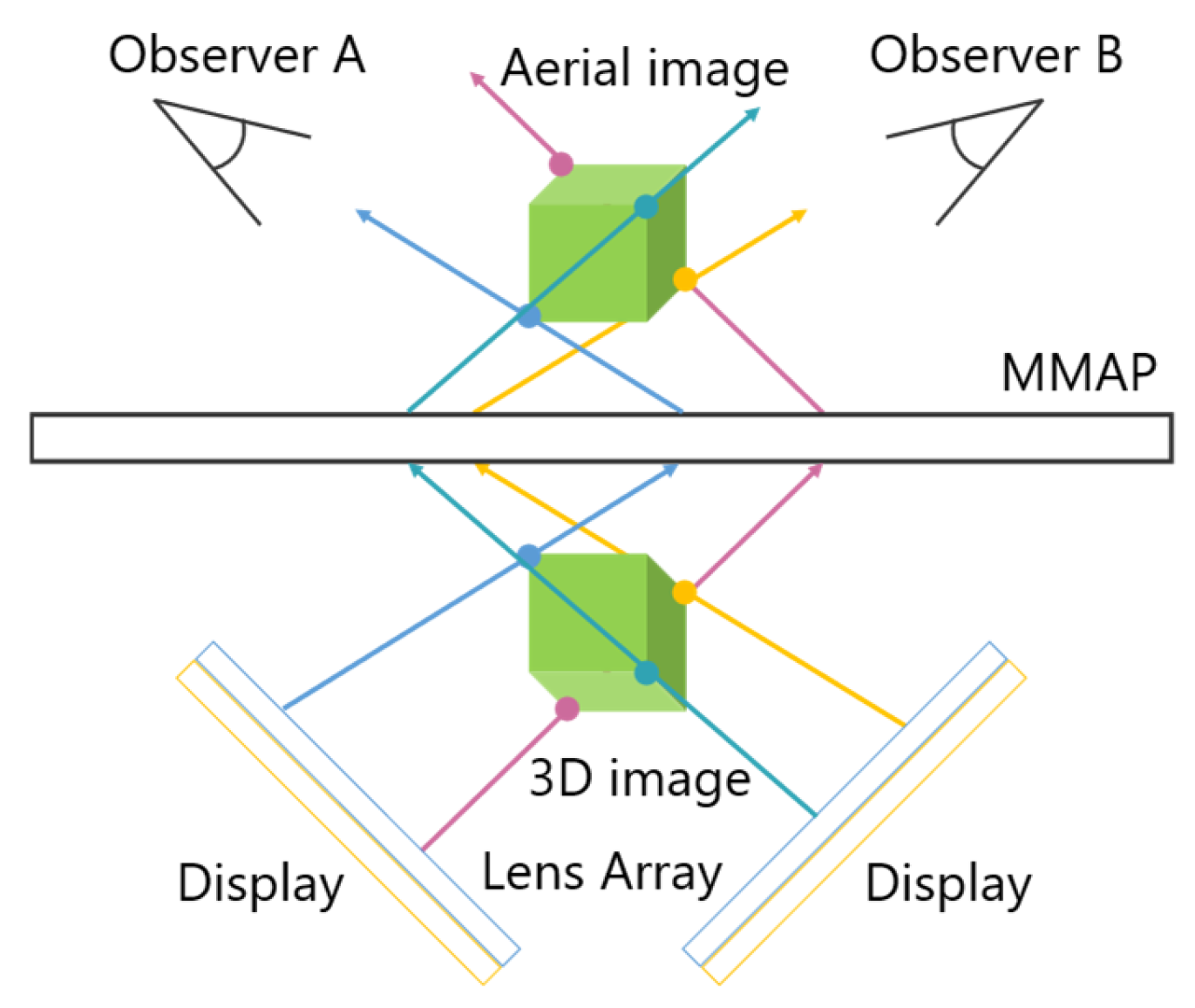
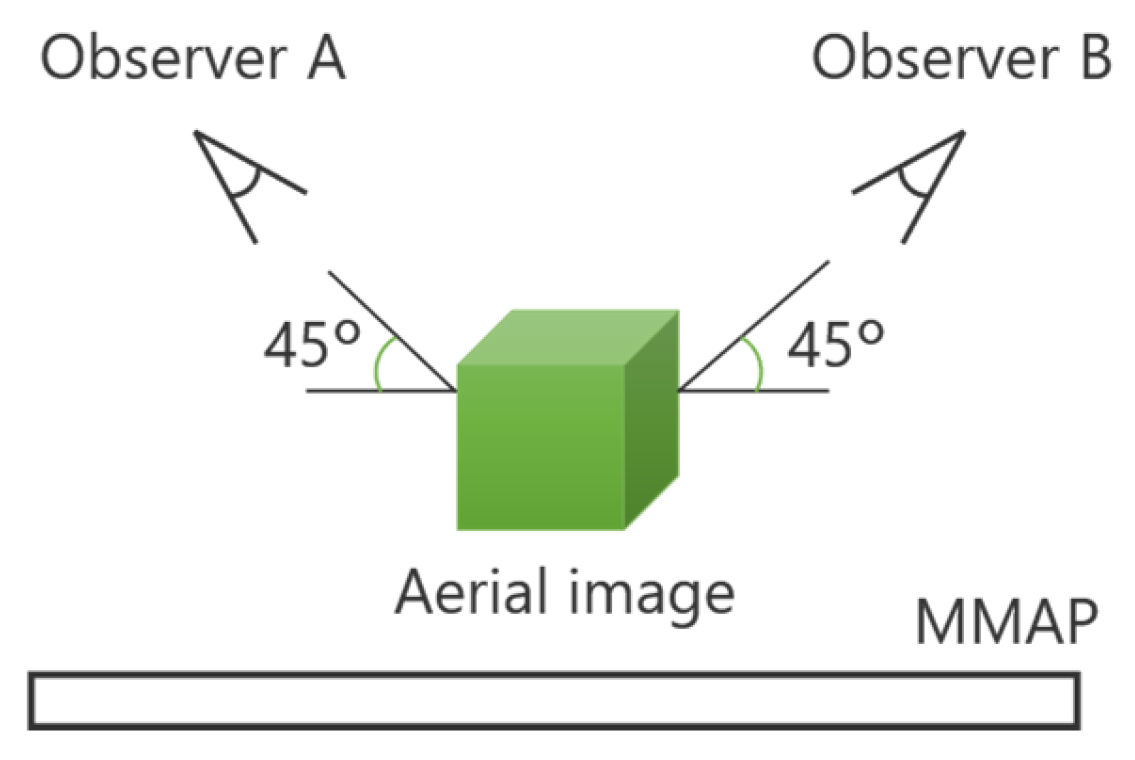
2.3. Face-to-Face Aerial Display
2.4. Omnidirectional 3D Autostereoscopic Aerial Display
3. Proposed Method
4. Experiment
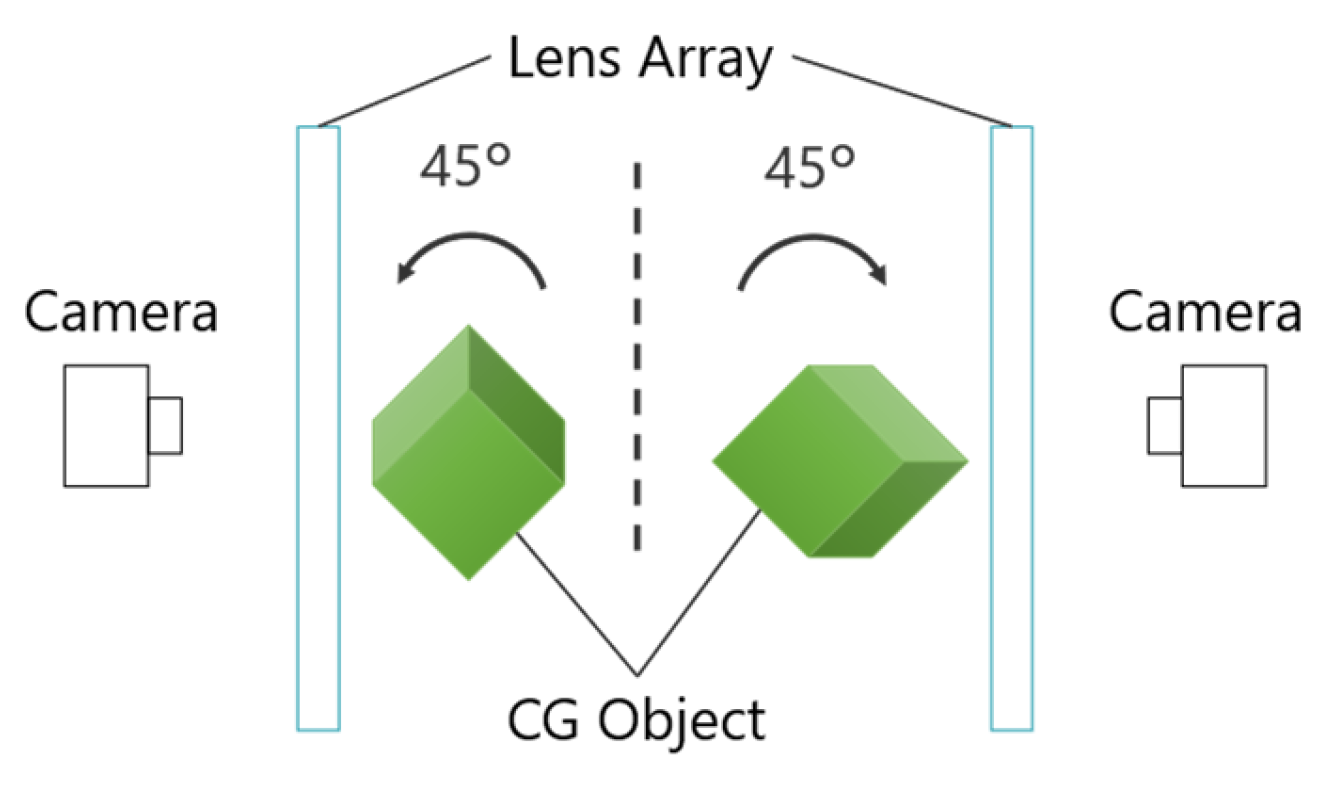
4.1. Photographing the CG Object with Integral Photography (IP)
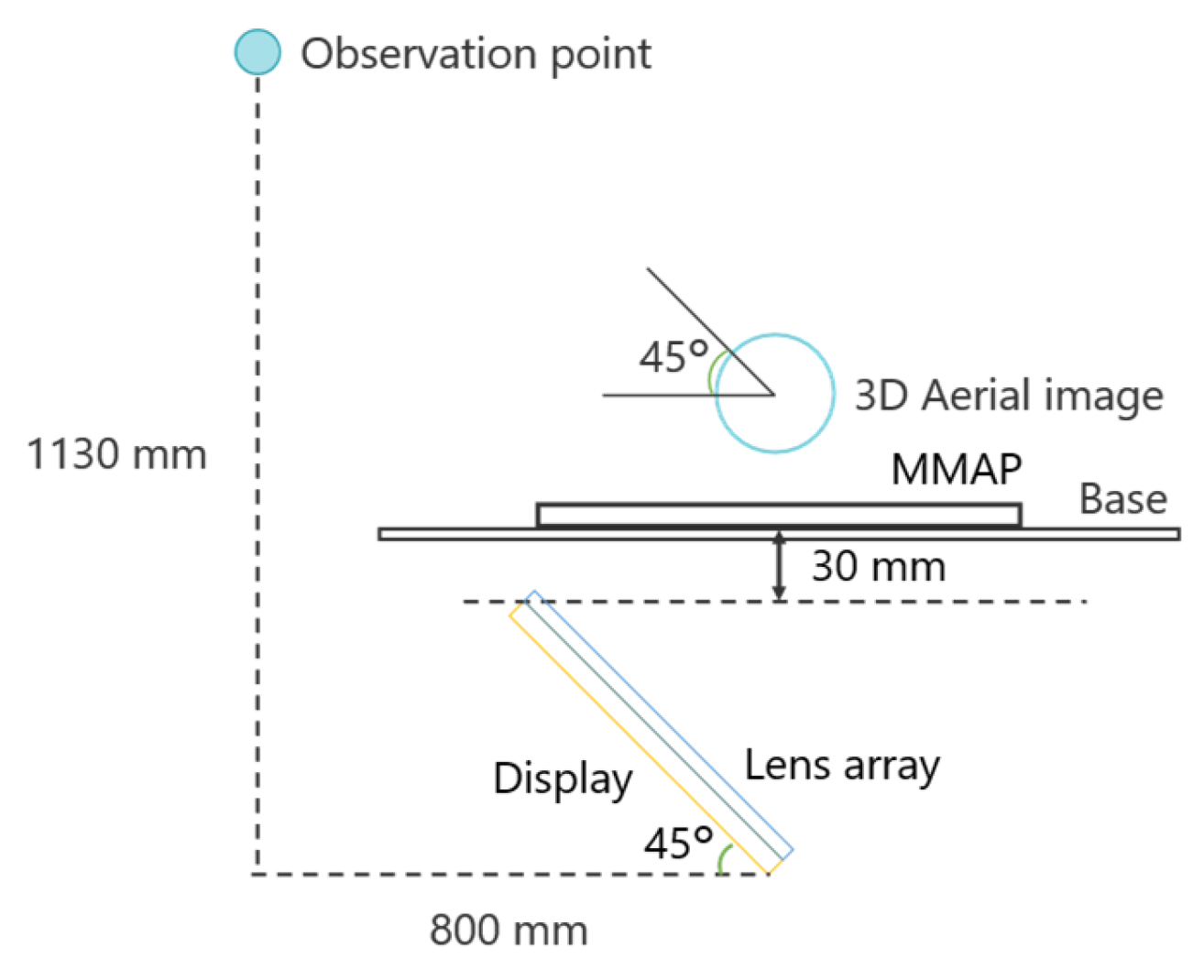
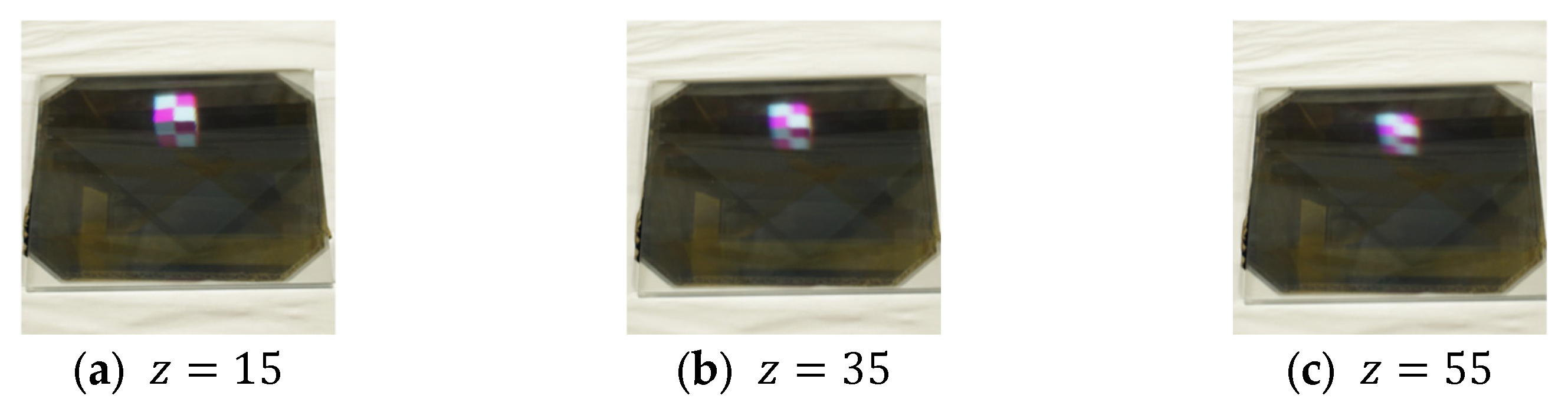
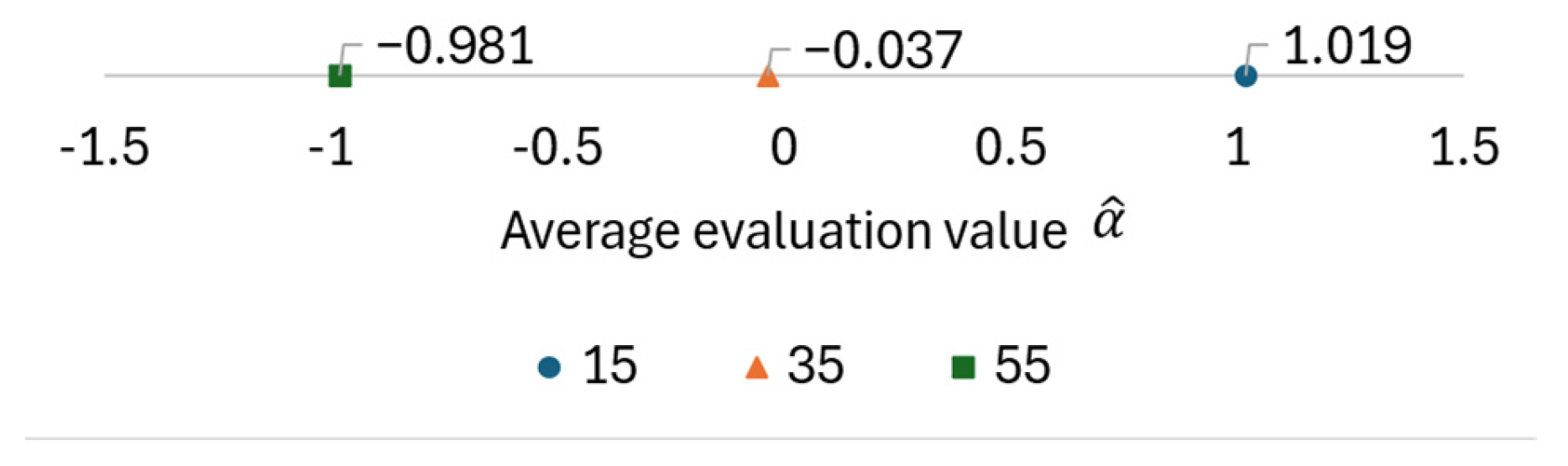
4.2. Experiment 1: Evaluation of 3D Aerial Images
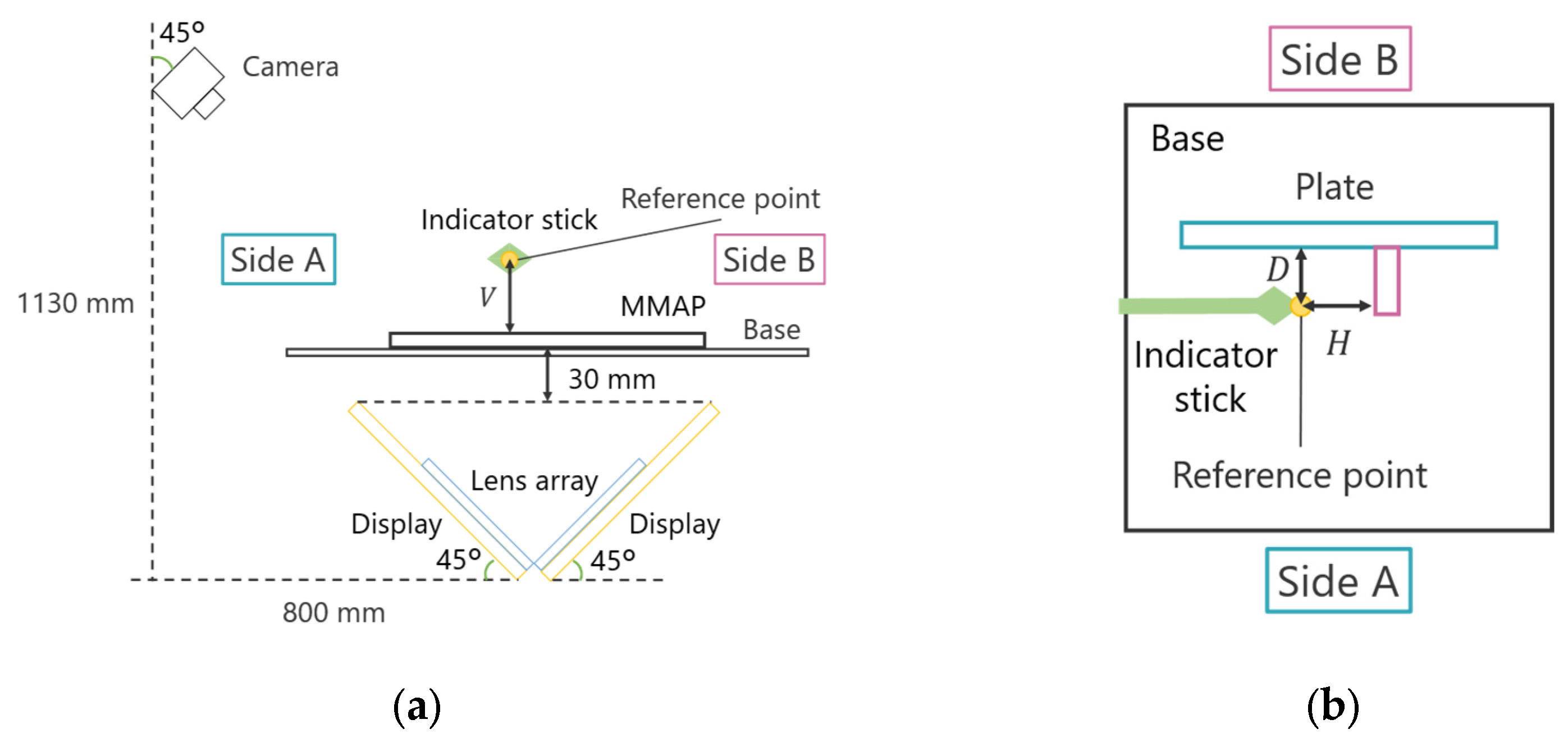
4.3. Evaluation 2: Measuring Misalignment of Aerial Images
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yamamoto, H. Fundamentals and Social Implementations of Aerial Display. J. Inst. Image Inf. Telev. Eng. 2021, 75, 181–187. [Google Scholar] [CrossRef]
- Kuwayama, T. Aerial display technology to realize a non-contact society. Inst. Image Inf. Telev. Eng. Tech. Rep. 2021, 45, 25–32. [Google Scholar]
- Ando, S.; Otao, K.; Ochiai, Y. Glass-Beads Display: Evaluation for Aerial Graphics Rendered by Retro-Reflective Particles. In HCI International 2019 Posters (HCII 2019), Communications in Computer and Information Science; Springer: Cham, Switzerland, 2019; Volume 1032, pp. 125–133. [Google Scholar]
- Zhang, N.; Huang, T.; Zhang, X.; Hu, C.; Liao, H. Omnidirectional 3D autostereoscopic aerial display with continuous parallax. J. Opt. Soc. Am. A 2022, 39, 782–792. [Google Scholar] [CrossRef] [PubMed]
- Ochiai, Y.; Kumagai, K.; Hoshi, T.; Rekimoto, J.; Hasegawa, S.; Hayasaki, Y. Fairy Lights in Femtoseconds: Aerial and Volumetric Graphics Renderedby Focused Femtosecond Laser Combined with Computational Holographic Fields. ACM Trans. Graph. 2016, 35, 17. [Google Scholar] [CrossRef]
- Yamamoto, H.; Tomiyama, Y.; Suyama, S. Floating aerial LED signage based on aerial imaging by retro-reflection (AIRR). Opt. Express 2014, 22, 26919–26924. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.-L.; Deng, H.; Ren, H.; Yang, X.; Xing, Y.; Li, D.-H.; Wang, Q.-H. Method to eliminate pseudoscopic issue in an integral imaging 3D display by using a transmissive mirror device and light filter. Opt. Lett. 2020, 45, 351–354. [Google Scholar] [CrossRef]
- Zhang, H.-L.; Liu, Y.-J.; Wen, X.-R.; Li, W.-Z.; Xing, Y. Floating depth and viewing angle enhanced integral imaging display system based on a transmissive mirror device. Opt. Express 2024, 32, 22052–22066. [Google Scholar] [CrossRef] [PubMed]
- Yushimizu, Y.; Iwase, E. Radially Arranged Dihedral Corner Reflector Array for Wide Viewing Angle of Seamless Floating Image. In Proceedings of the 2019 IEEE 32nd International Conference on Micro Electro Mechanical Systems (MEMS), Seoul, Republic of Korea, 27–31 January 2019; pp. 274–277. [Google Scholar]
- Nakao, I.; Sakamoto, T.; Yamaguchi, M. See-through aerial display using a dihedral corner reflector array and hologram mirrors. Appl. Opt. 2021, 60, 9896–9905. [Google Scholar] [CrossRef] [PubMed]
- Watanabe, T.; Amano, S.; Izawa, S.; Maekawa, S.; Yoshiki, K.; Yamaguchi, A.; Utsumi, Y. Study of Dihedral-Corner-Reflector-Array Fabrication Process Using Soft X-ray Deep X-ray Lithography. J. Photopolym. Sci. Technol. 2023, 36, 97–100. [Google Scholar] [CrossRef]
- Hiratani, K.; Iwai, D.; Kageyama, Y.; Punpongsanon, P.; Hiraki, T.; Sato, K. Shadowless Projection Mapping using Retrotransmissive Optics. IEEE Trans. Vis. Comput. Graph. 2023, 29, 2280–2290. [Google Scholar] [CrossRef] [PubMed]
- Sato, Y.; Osada, Y.; Kobayashi, R.; Bao, Y. Aerial floating 3D display device with lenticular-type naked-eye 3D display and a crossed-mirror array. Appl. Opt. 2021, 60, 8267–8276. [Google Scholar] [CrossRef] [PubMed]
- Osada, Y.; Bao, Y. Design of Ghost-free Aerial Display by Using Polarizing Plate and Dihedral Corner Reflector Array. In Proceedings of the 2021 5th International Conference on Imaging. Signal Processing and Communications (ICISPC), Kumamoto, Japan, 23–25 July 2021; pp. 67–70. [Google Scholar]
- Kurihara, A.; Bao, Y. Ghost reduction and brightness enhancement of aerial images using lens diffusers in MMAP. Opt. Contin. 2024, 3, 1706–1721. [Google Scholar] [CrossRef]
- Katsumoto, H.; Kajita, H.; Koizumi, N.; Naemura, T. HoVerTable PONG: Playing Face-to-face Game on Horizontal Tabletop with Moving Vertical Mid-air Image. In Proceedings of the 13th International Conference on Advances in Computer Entertainment Technology (ACE ’16). Association for Computing Machinery, New York, NY, USA, 9–12 November 2016; pp. 1–6. [Google Scholar]
- Yamamoto, H. Recent Developments and Prospective Applications of Aerial Display; CMC Publishing Co., Ltd.: Tokyo, Japan, 2018; pp. 35–45. [Google Scholar]
- Lippmann, G. Epreuves reversibles donnant la sensation du relief. J. Phys. 1908, 7, 821–825. [Google Scholar] [CrossRef]
- Martínez-Corral, M.; Javidi, B. Fundamentals of 3D imaging and displays: A tutorial on integral imaging, light-field, and plenoptic systems. Adv. Opt. Photonics 2018, 10, 512–566. [Google Scholar] [CrossRef]
- Okano, F.; Hoshino, H.; Arai, J.; Yuyama, I. Real-time pickup method for a three-dimensional image based on integral photography. Appl. Opt. 1997, 36, 1598–1603. [Google Scholar] [CrossRef] [PubMed]
- Oishi, N.; Bao, Y. Analysis of imaging methods using two-dimensional concave lens arrays in integral photography. J. Inst. Image Electron. Eng. Jpn. 2011, 40, 412–420. [Google Scholar]
- Takagi, H. Practical Statistical Tests & Machine Learning-III-Significance Difference Tests for Subjective Evaluation Experiments. Inst. Syst. Control Inf. Eng. 2014, 58, 514–520. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First Layer | |||
|---|---|---|---|
| Odd Times | Even Times | ||
| Second layer | Odd times | Aerial image | Ghost |
| Even times | Ghost | Transmitted light | |
| Equipment | Parameters | Specification |
|---|---|---|
| MMAP | model number | ASKA3D-200NT |
| size | 200 × 200 mm | |
| pitch | 0.3 mm | |
| viewing angle | 40° | |
| material | optical resins | |
| Display | model number | JN-MD-IPS133UHDR-T |
| body size | 312 × 194 × 11 mm | |
| screen size | 13.3 inch | |
| resolution | 3840 × 2160 pixel | |
| Lens array | type | lenticular lens |
| LPI | 22 | |
| thickness | 3.0 mm | |
| index of refraction | 1.49 | |
| material | acrylic | |
| Camera | model number | SONY α6000 |
| lens | E 30 mm F3.5 Macro | |
| resolution | 6000 × 4000 pixel | |
| ISO | 100 | |
| shutter speed | 1/5 s | |
| f-number | f/3.5 | |
| Plate for the measurement experiment | material | acrylic |
| index of refraction | 1.49 | |
| thickness | 10.0 mm |
| Display Position (z) | 15–55 | 55–35 | 15–35 |
|---|---|---|---|
| Subject 1 | 2 | −1 | 1 |
| Subject 2 | 2 | −1 | 1 |
| Subject 3 | 2 | −2 | 1 |
| Subject 4 | 2 | −1 | 1 |
| Subject 5 | 2 | −2 | 2 |
| Subject 6 | 2 | −2 | 1 |
| Subject 7 | 2 | −2 | 2 |
| Subject 8 | 2 | −1 | 1 |
| Subject 9 | 2 | −1 | 1 |
| Subject 10 | 2 | −1 | 2 |
| Subject 11 | 2 | 0 | 2 |
| Subject 12 | 2 | −2 | 2 |
| Subject 13 | 2 | −1 | 1 |
| Subject 14 | 2 | −1 | 2 |
| Subject 15 | 2 | −2 | 2 |
| Subject 16 | 2 | −1 | 1 |
| Subject 17 | 2 | −2 | 2 |
| Subject 18 | 2 | −2 | 1 |
| Side A (mm) | Side B (mm) | Misalignment (mm) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 1st | 127.5 | 18.5 | 80.3 | 127.8 | 17.5 | 79.5 | −0.3 | 1.0 | 0.8 |
| 2nd | 127.8 | 18.8 | 80.5 | 128.0 | 17.3 | 79.8 | −0.2 | 1.5 | 0.7 |
| 3rd | 127.5 | 18.5 | 80.5 | 128.0 | 17.5 | 79.5 | −0.5 | 1.0 | 1.0 |
| 4th | 127.3 | 18.5 | 80.8 | 127.5 | 17.8 | 79.5 | −0.2 | 0.7 | 1.3 |
| 5th | 127.5 | 18.8 | 80.5 | 127.8 | 17.5 | 79.8 | −0.3 | 1.3 | 0.7 |
| 6th | 127.3 | 18.5 | 80.5 | 128.0 | 17.5 | 79.5 | −0.7 | 1.0 | 1.0 |
| 7th | 127.8 | 19.0 | 80.3 | 128.3 | 17.8 | 79.8 | −0.5 | 1.2 | 0.5 |
| 8th | 127.5 | 18.8 | 80.8 | 128.0 | 17.8 | 79.5 | −0.5 | 1.0 | 1.3 |
| 9th | 127.8 | 18.8 | 80.5 | 127.8 | 17.5 | 79.3 | 0.0 | 1.3 | 1.2 |
| 10th | 127.5 | 18.8 | 80.8 | 127.8 | 17.8 | 79.5 | −0.3 | 1.0 | 1.3 |
| Avg. | 127.6 | 18.7 | 80.6 | 127.9 | 17.6 | 79.6 | −0.4 | 1.1 | 1.0 |
| Side A (mm) | Side B (mm) | Misalignment (mm) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 1st | 123.3 | 16.5 | 75.8 | 123.5 | 17.5 | 76.0 | −0.2 | −1.0 | −0.2 |
| 2nd | 123.0 | 16.8 | 76.0 | 123.8 | 17.3 | 75.5 | −0.8 | −0.5 | 0.5 |
| 3rd | 123.5 | 17.0 | 75.8 | 124.0 | 17.5 | 75.8 | −0.5 | −0.5 | 0.0 |
| 4th | 123.8 | 17.3 | 75.5 | 123.8 | 17.8 | 75.5 | 0.0 | −0.5 | 0.0 |
| 5th | 123.3 | 16.8 | 76.0 | 123.5 | 17.3 | 76.0 | −0.2 | −0.5 | 0.0 |
| 6th | 123.8 | 16.5 | 75.8 | 123.8 | 17.5 | 75.8 | 0.0 | −1.0 | 0.0 |
| 7th | 123.3 | 16.8 | 76.0 | 124.3 | 17.8 | 75.8 | −1.0 | −1.0 | 0.2 |
| 8th | 123.5 | 16.8 | 75.8 | 124.0 | 17.5 | 75.5 | −0.5 | −0.7 | 0.3 |
| 9th | 123.3 | 16.5 | 76.0 | 123.8 | 17.5 | 76.0 | −0.5 | −1.0 | 0.0 |
| 10th | 123.5 | 17.0 | 76.0 | 124.0 | 17.3 | 75.5 | −0.5 | −0.3 | 0.5 |
| Avg. | 123.4 | 16.8 | 75.9 | 123.9 | 17.5 | 75.7 | −0.4 | −0.7 | 0.1 |
| Avg. | 0.7 | −20.5 | −0.9 | |
| SD | 0.31 | 0.30 | 0.34 | |
| 95% CI | Lower limit | 0.51 | −20.67 | −1.06 |
| Upper limit | 0.89 | −20.29 | −0.64 | |
| t-value | 0.07 | −1.96 | −0.09 | |
| p-value | 0.95 | 0.08 | 0.93 | |
| Avg. | −0.4 | 1.1 | 1.0 | |
| SD | 0.19 | 0.21 | 0.28 | |
| 95% CI | Lower limit | −0.47 | 0.97 | 0.81 |
| Upper limit | −0.23 | 1.23 | 1.15 | |
| t-value | −0.02 | 0.07 | 0.09 | |
| p-value | 0.98 | 0.94 | 0.93 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kurihara, A.; Bao, Y. Reduction of Aerial Image Misalignment in Face-to-Face 3D Aerial Display. J. Imaging 2025, 11, 150. https://doi.org/10.3390/jimaging11050150
Kurihara A, Bao Y. Reduction of Aerial Image Misalignment in Face-to-Face 3D Aerial Display. Journal of Imaging. 2025; 11(5):150. https://doi.org/10.3390/jimaging11050150
Chicago/Turabian StyleKurihara, Atsutoshi, and Yue Bao. 2025. "Reduction of Aerial Image Misalignment in Face-to-Face 3D Aerial Display" Journal of Imaging 11, no. 5: 150. https://doi.org/10.3390/jimaging11050150
APA StyleKurihara, A., & Bao, Y. (2025). Reduction of Aerial Image Misalignment in Face-to-Face 3D Aerial Display. Journal of Imaging, 11(5), 150. https://doi.org/10.3390/jimaging11050150