4.1. Experiment Design
A set of experiments was performed on randomly generated instances with real-life characteristics. Instances were generated on a 2-h by 2-h hypothetical network and the customer locations were generated randomly within the network perimeter. For the experiments, a network with one marine container terminal, one empty container depot, one chassis yard, one drop yard, one truck depot, and one owner-operator facility were considered. Experiments were carried out using representative transaction times for U.S. marine terminals and second-tier facilities as shown in
Table 4. For double moves (e.g., returning an empty container and picking up an import container on the same trip), the transaction time was assumed to be the summation of transaction times, plus one queuing time. The lower bound of time windows was assumed to be uniformly distributed in the range of 0 (8:00 a.m.) to 240 (12:00 p.m.) and the upper bound was calculated according to the width of the time window. The width of the time window was assumed to be 240 min. It was assumed that the marine terminal and the off-terminal chassis yard/empty container depot/drop yard are 10 min apart. The ratio of 20-ft containers to 40-ft containers was assumed to be 25:75 to reflect the approximate current 20-ft to 40-ft container ratio in the U.S. [
27].
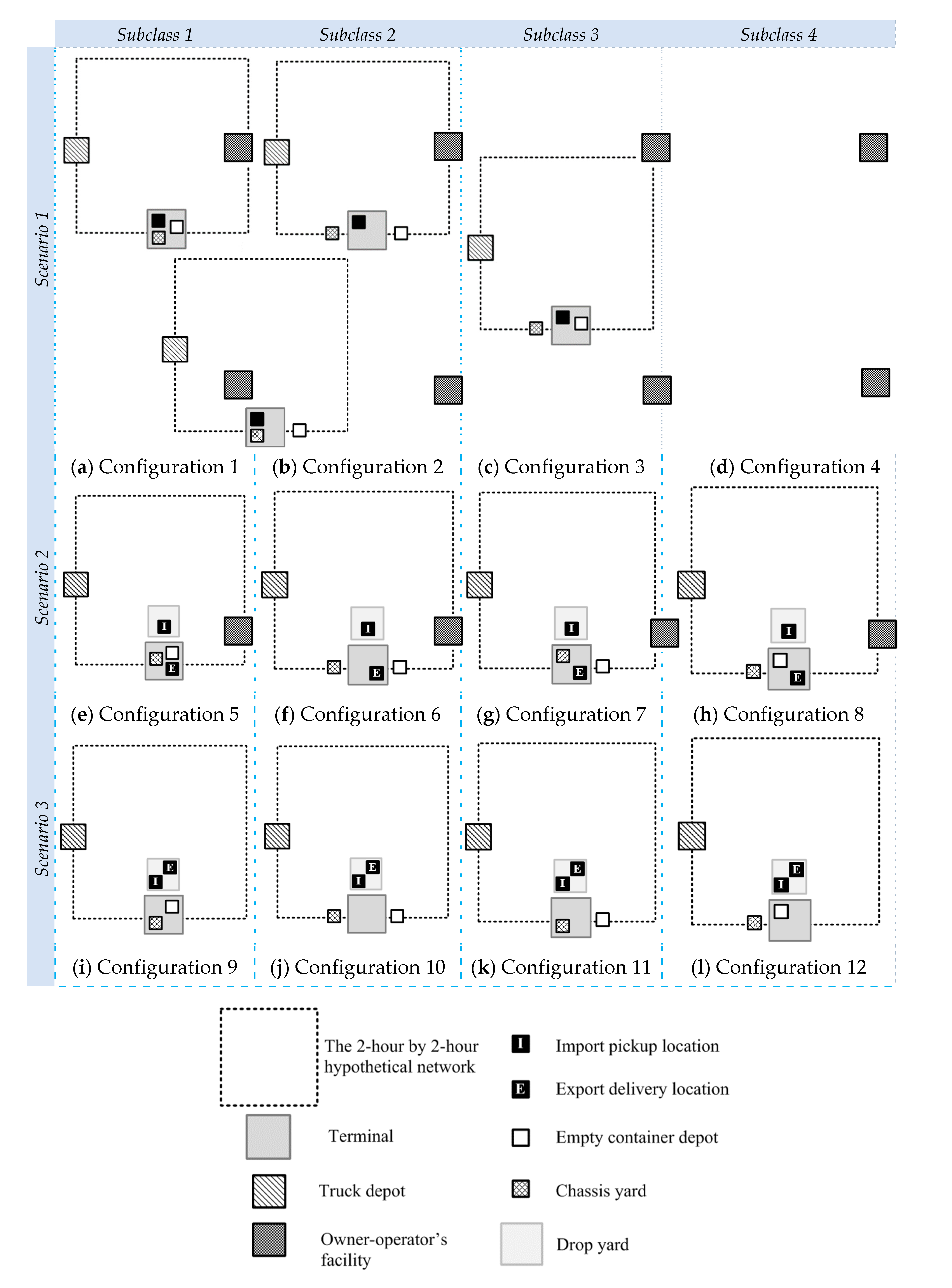
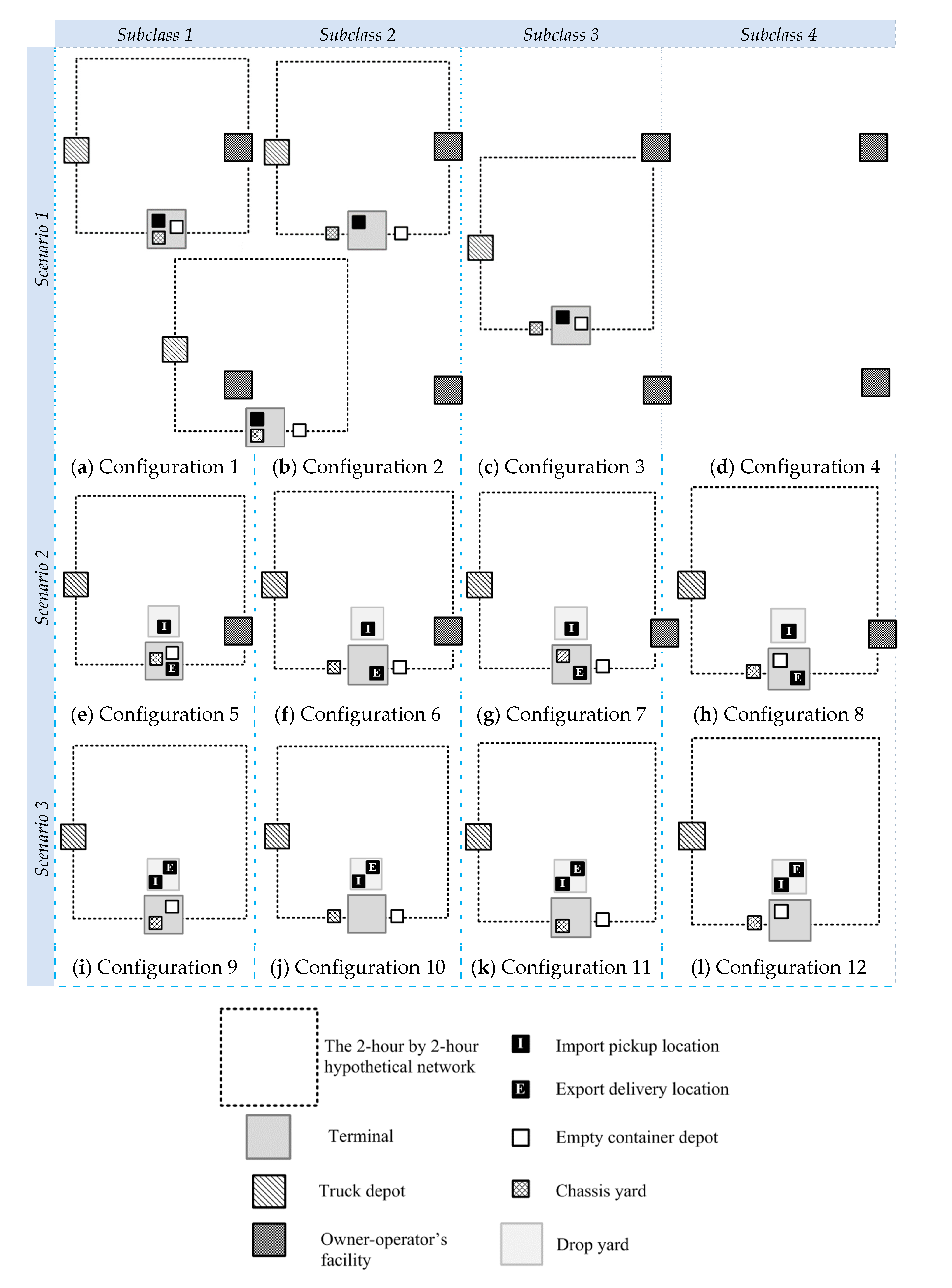
Based on the location of the chassis yard, empty container depot, import pickup, and export delivery, 12 configurations were considered as shown in
Figure 4. Note that Configurations 1 to 4 (
Figure 4a–d) are associated with Scenario 1, Configurations 5 to 8 (
Figure 4e–h) are associated with Scenario 2, and Configurations 9 to 12 (
Figure 4i–l) are associated with Scenario 3. An experimental design was set up to study the effect of the aforementioned scenarios on drayage operation time. One type of experimental design is factorial experimental design (FED). In FED, first, a set of “factors” is selected which consists of the variables that are chosen to be studied. Then, these factors are systematically set to predefined discrete values, known as “levels.” In FED, combinations of all levels of factors are considered, and then the effect of each combination on the output is studied.
In this study, the factors considered, and their levels are as follows.
Problem size in terms of number of job nodes (PS)
Levels: (1) 60, and (2) 100
Scenario (S)
Levels: (1) Scenario 1, (2) Scenario 2, and (3) Scenario 3
Empty container depot location (ECL)
Levels: (1) inside the terminal (ONEC), and (2) outside the terminal (OFFEC)
Chassis yard location (CHSS)
Levels: (1) inside the terminal (ONTY), (2) outside the terminal in (OFFTY)
Percent of job nodes: % of empty container delivery nodes, % of loaded container delivery nodes, % of empty container pickup nodes, % of loaded container pickup nodes (PJN):
Levels: (1) 25:25:25:25, and (2) 15:35:35:15
The combination of factors and levels result in a 2 × 3 × 2 × 2 × 2 factorial design which yields a total of 48 problem classes. For each problem class, three instances are randomly generated which yields 144 experiments. The 25:25:25:25 is equivalent to the typical percent of job nodes at the Port of Oakland’s terminal gate transactions, and the 15:35:35:15 is equivalent to the typical percent of job nodes at Port of Long Beach’s terminal gate transactions, based on available data.
To facilitate the presentation of the results, the combination of factors (3 and 4) and their levels are grouped into subclasses, as outlined below.
Subclass 1. ONEC and ONTY (Configurations 1, 5 and 9 shown in
Figure 4)
Subclass 2. OFFEC and OFFTY (Configurations 2, 6 and 10 shown in
Figure 4)
Subclass 3. OFFEC and ONTY (Configurations 3, 7 and 11 shown in
Figure 4)
Subclass 4. ONEC and OFFTY (Configurations 4, 8 and 12 shown in
Figure 4)
The subclasses are illustrated in
Figure 4 by the dashed blue lines. Note that for subclass 1, both the chassis yard and empty container depot are located inside the marine terminal. For subclass 2, both are located outside the marine terminal. For subclass 3, the chassis yard is located inside the marine terminal and the empty container depot is located outside. Lastly, for subclass 4, the chassis yard is located outside the marine terminal and the empty container depot is located inside.
4.2. Experimental Results and Discussion
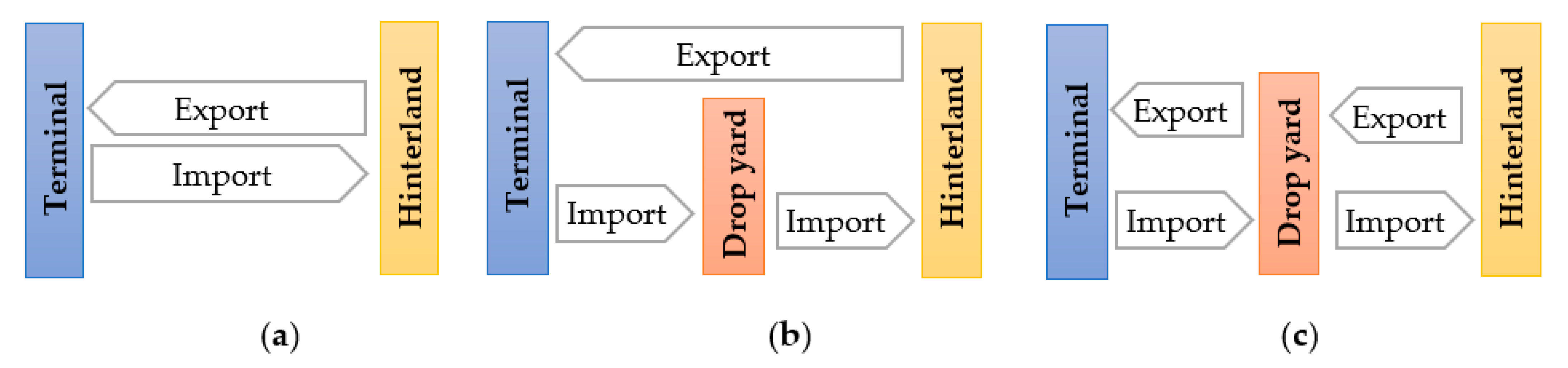
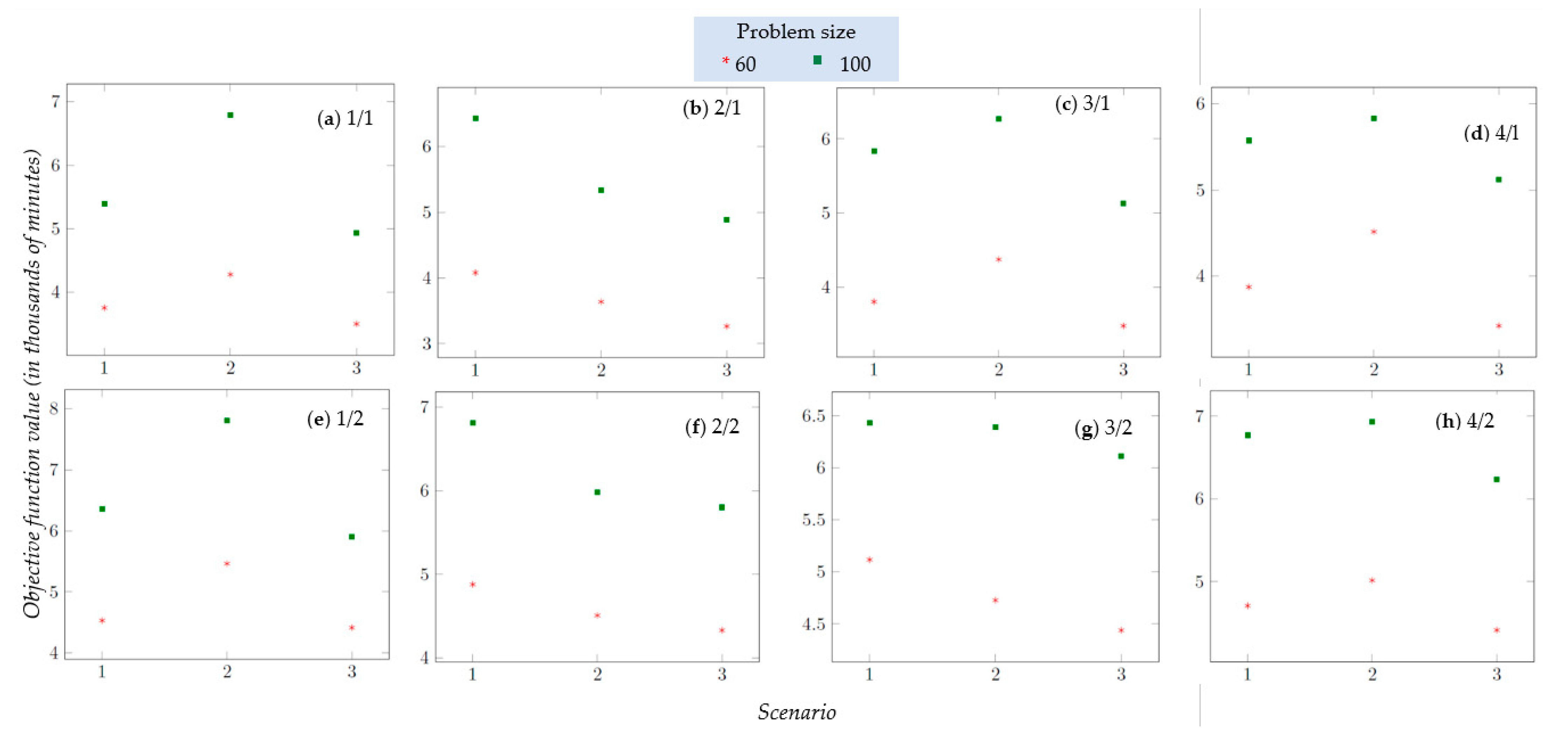
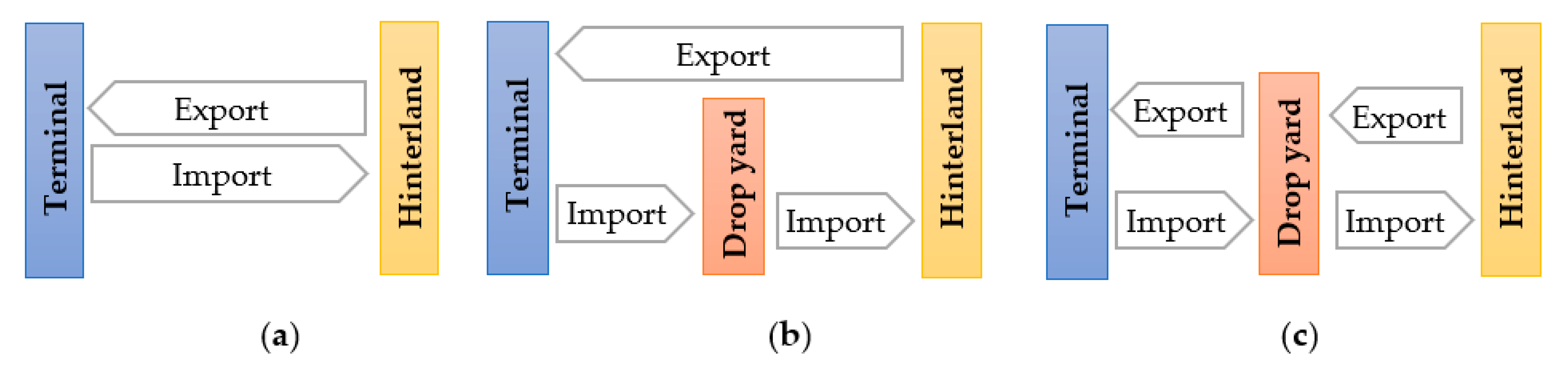
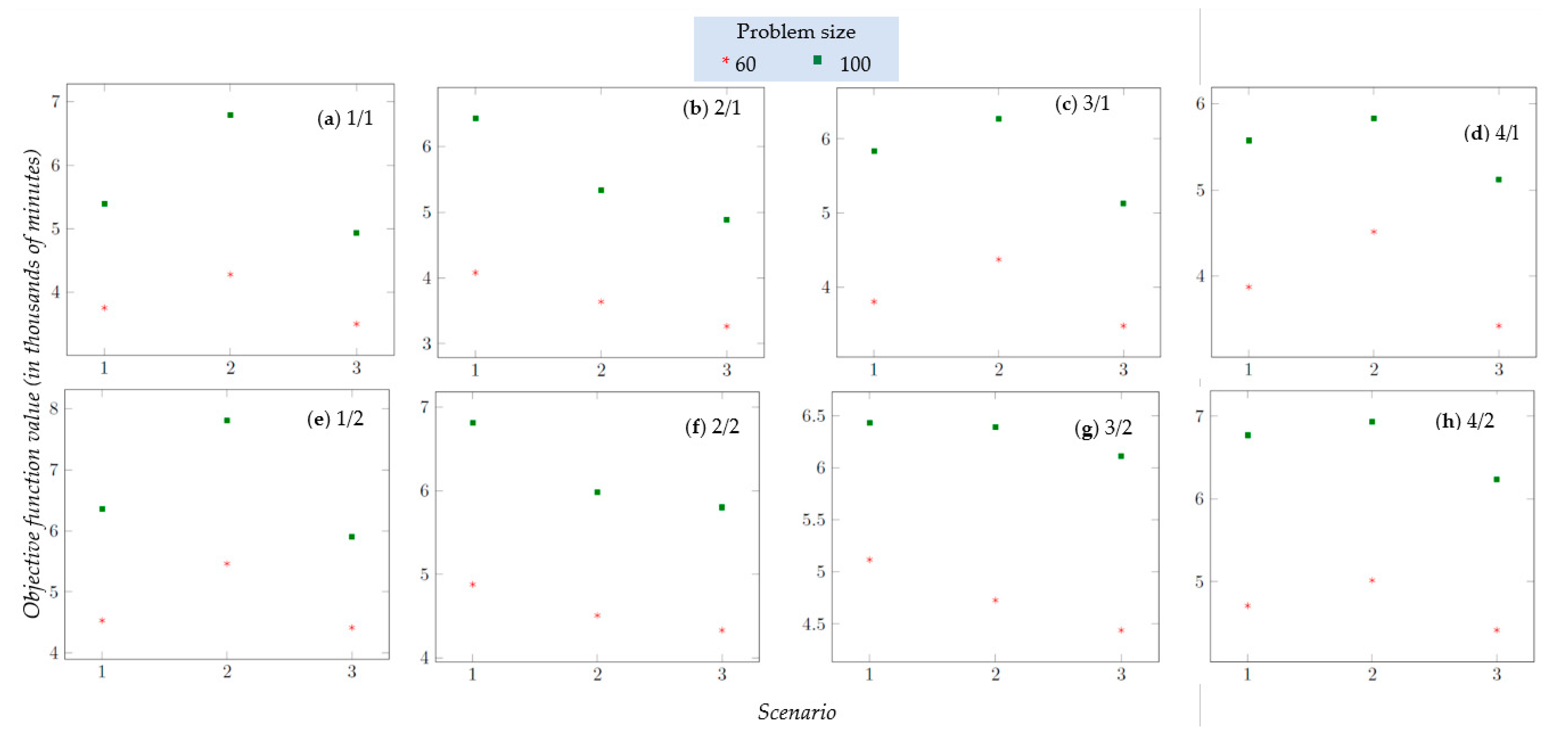
Figure 5 shows the average drayage operation time for all classes. The results are divided into eight groups (denoted as a-h) by the subclasses and percent of job nodes. The subclass and percent of job nodes are shown in the upper right-hand corner of each box. For example, in the group a, the value “1/1” denotes Subclass 1 and percent of job nodes level 1. The asterisks on each box denote the average drayage operation time for classes with 60 job nodes, and the squares on each box denote classes with 100 job nodes. To understand the impact of second-tier facilities, in the following, it may be helpful to recall that Scenario 1 represents the traditional drayage practice where the import and export operations take place inside the marine terminal. Scenario 2 and 3 represent new practices. Import operations take place at the drop yard in Scenario 2, and both import and export operations take place at the drop yard in Scenario 3.
Figure 5a–d show the results of classes where the percent of job nodes is equal to 25:25:25:25.
Figure 5e–h show the results of classes where the percent of job nodes is equal to 15:35:35:15. Based on the experimental results for all the subclasses in Scenario 1, Subclass 1 has the lowest drayage operation time. Based on the experimental results for all the subclasses in Scenario 2, Subclass 2 has the lowest drayage operation time. Similarly, based on the experimental results for all the subclasses in Scenario 3, Subclass 2 has the lowest drayage operation time. Overall, the results from all sets of experiments showed that Scenario 3 with Subclass 2 has the lowest drayage operation time.
Table 5 and
Table 6 show the relative ranking of traditional and new practices in placing import pickup and export delivery locations (i.e., scenarios) based on drayage operation time. It may be helpful to recall that in the traditional practice both import pickup and export delivery locations are inside the terminal, and in the new practices, either only import pickup location is at an off-terminal drop yard and export delivery location is inside the terminal, or both import pickup and export delivery locations are at an off-terminal drop yard. Rankings are provided in different configurations of chassis yard and empty container depot locations (i.e., inside/on-terminal or outside/off-terminal).
Table 5 and
Table 6 show the results of experiments where the percent of job nodes are 25:25:25:25 and 15:35:35:15, respectively.
Results show that the new practice where both import pickup and export delivery locations are at an off-terminal drop yard has the lowest drayage operation time in all configurations of chassis yard and empty container depot locations. From these results, it can be concluded that by moving the locations of both import pickup and export delivery from inside
The container terminal to a location outside the terminal, the efficiency of drayage operation would increase. The reason is that the drop yard has shorter queues and shorter turn times compared to the marine terminal, which leads to net improvement in drayage operation efficiency.
Comparing the results of the traditional practice against the new practice, where only export delivery location is inside the terminal and import pickup location is outside the terminal, indicated that depending on the percent of job nodes as well as the locations of chassis yard and empty container depot, either of these two practices have the second-lowest drayage operation time. When there are an equal number of empty container delivery, loaded container delivery, empty container pickup and loaded container pickup requests (i.e., the percent of job nodes is 25:25:25:25), traditional practice where both import pickup and export delivery locations are inside the terminal has the second-lowest drayage operation time with configurations where empty container depot and/or chassis yard are located inside the terminal. The reason is that drayage operation efficiency will increase by utilizing double moves inside the terminal in the traditional practice. However, when both empty container depot and chassis yard are located outside the terminal trucks can make fewer double moves inside the terminal. As a result, the new practice where only import pickup location is at an off-terminal drop yard, with shorter queues and shorter turn times compared to the marine terminal, becomes the practice with second-lowest drayage operation time where both chassis yard and empty container location are outside the terminal.
When the percent of job nodes is 15:35:35:15 (i.e., 15% of empty container delivery nodes, 35% of loaded container delivery nodes, 35% of empty container pickup nodes, 15% of loaded container pickup nodes), the number of customers with empty container pickup and loaded container delivery requests are higher than the number of customers with empty container delivery and loaded container pickup requests. As a result, the locations of empty container depot and import pickup play a critical role in the efficiency of drayage operation (i.e., whether or not both are inside the terminal). Traditional practice where both import pickup and export delivery locations are inside the terminal has the second-lowest operation time with the configurations in which the empty container depot is inside the terminal. The reason is that in this practice trucks can make double moves inside the marine terminal, picking up import containers after delivering empty containers (the percentage of both is 35%) which improves drayage efficiency and makes this scenario more efficient where empty containers are located inside the terminal. The new practice where only import pickup location is at an off-terminal drop yard and export delivery location is inside the terminal has the second-lowest operation time in configurations where empty container depot is located outside the terminal. The reason is that in this practice, import pickup location is outside the terminal and trucks can make less double moves inside the terminal. Instead, the shorter queues and shorter turn times at the drop yard and the off-terminal empty container depot play a critical role in the efficiency of drayage operation in this scenario and make it more efficient in the configurations where the empty container depot is located outside the terminal.
Table 7 shows the most efficient locations for empty container depot and chassis yard in traditional and new practices of placing import pickup and export delivery locations in the U.S. When both import pickup and export delivery locations are inside the terminal, the most efficient locations for empty container depot and chassis yard are inside the terminal. The reason is that with chassis, empty containers, import containers and export containers being stored at the terminal, trucks can drop off a chassis/empty container/loaded container and then pick up a chassis/empty container/loaded container on the same trip. When import pickup and/or export delivery locations are at drop yard, the most efficient locations for the chassis yard and empty container depot are outside the terminal. The reason is that when import and/or export containers are located outside the terminal, the truck cannot make double moves for import pickup and/or export delivery inside the terminal. Instead, by locating both empty container depot and chassis yard outside the terminal, drayage operation efficiency will increase as these facilities have a shorter queue and shorter turn times compared to the marine terminal. The results suggest that there is a logic to facility grouping. The chassis pools and container depots are most efficiently located with the last mile deliveries and pickups. If the driver who will deliver the import container to the consignee comes to the marine terminal, then the chassis and container depots should be there too. However, if that driver picks up the import container at an off-terminal drop yard, the empty container depot and chassis yard should be at the off-terminal locations as well.
The results show, in the traditional practice, by moving the location of empty container depot to a location outside the terminal, drayage operation time increased by 6% on average. Similarly, by moving the location of chassis to a location outside the terminal, drayage operation time increase 4% on average. When both empty container depot and chassis yard are moved to outside the terminal drayage operation time increased by 11% on average. Additionally, for the scenario in which the drop yard is used for import only, drayage operation time increased by 21% on average where both chassis yard and empty container are located inside the terminal. Drayage operation time increased by 9% on average where chassis yard is located inside the terminal and empty container are located outside the terminal. Additionally, drayage operation time increased by 12% where chassis yard is located outside the terminal and empty container depot is located inside the terminal. However, when both chassis yard and empty container depot are located outside the terminal drayage operation time decreased by 2%.
Finally, the results show that in all configurations of empty container depot and chassis yard locations, moving both import pickup and export delivery locations to outside the terminal will improve drayage operation time between 4% and 9% on average.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}