
Monocular Pose Estimation Method for Automatic Citrus Harvesting Using Semantic Segmentation and Rotating Target Detection


Abstract
1. Introduction
2. Related Work
2.1. Data Acquisition Platform
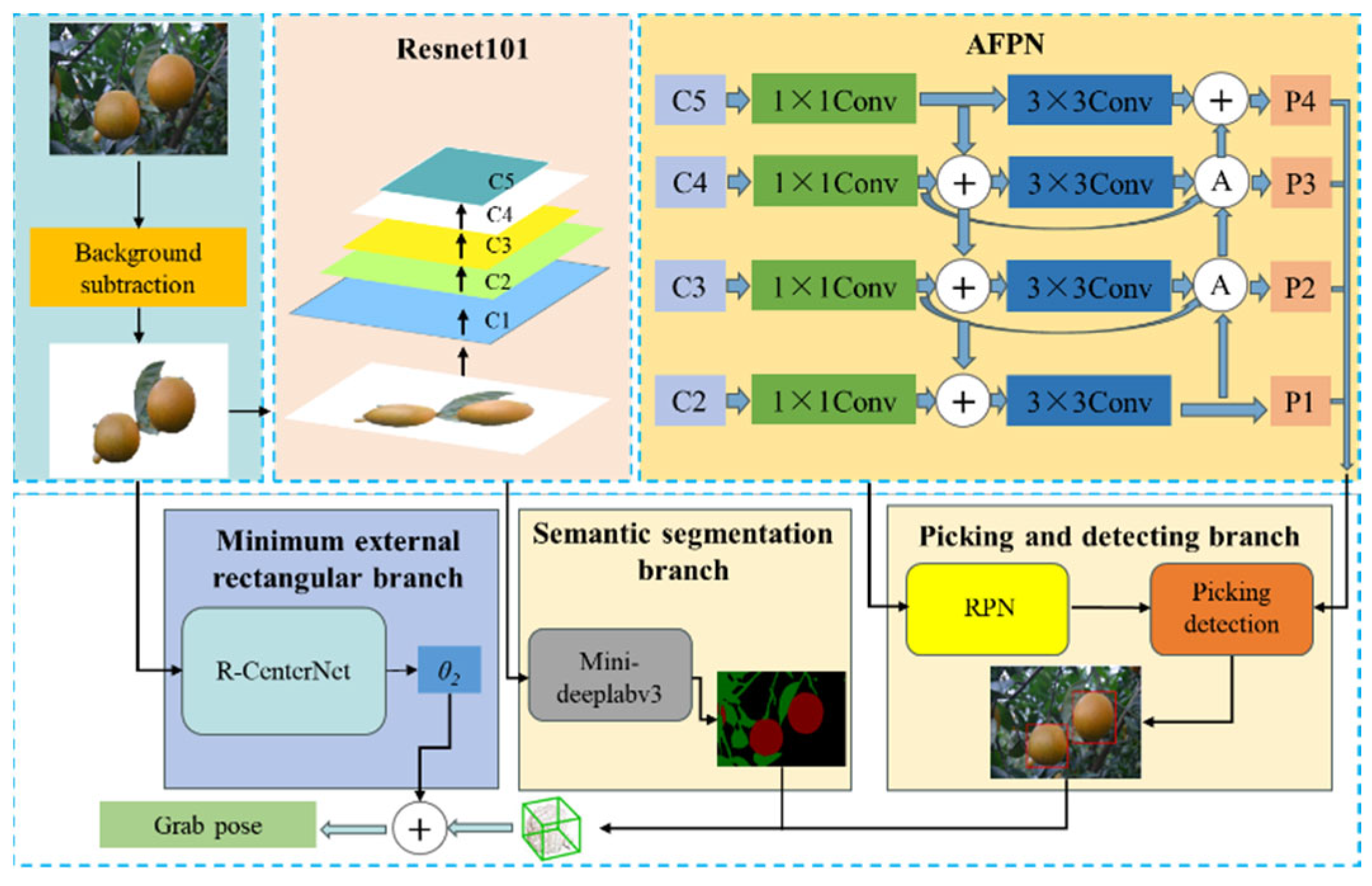
2.2. Network Model Construction
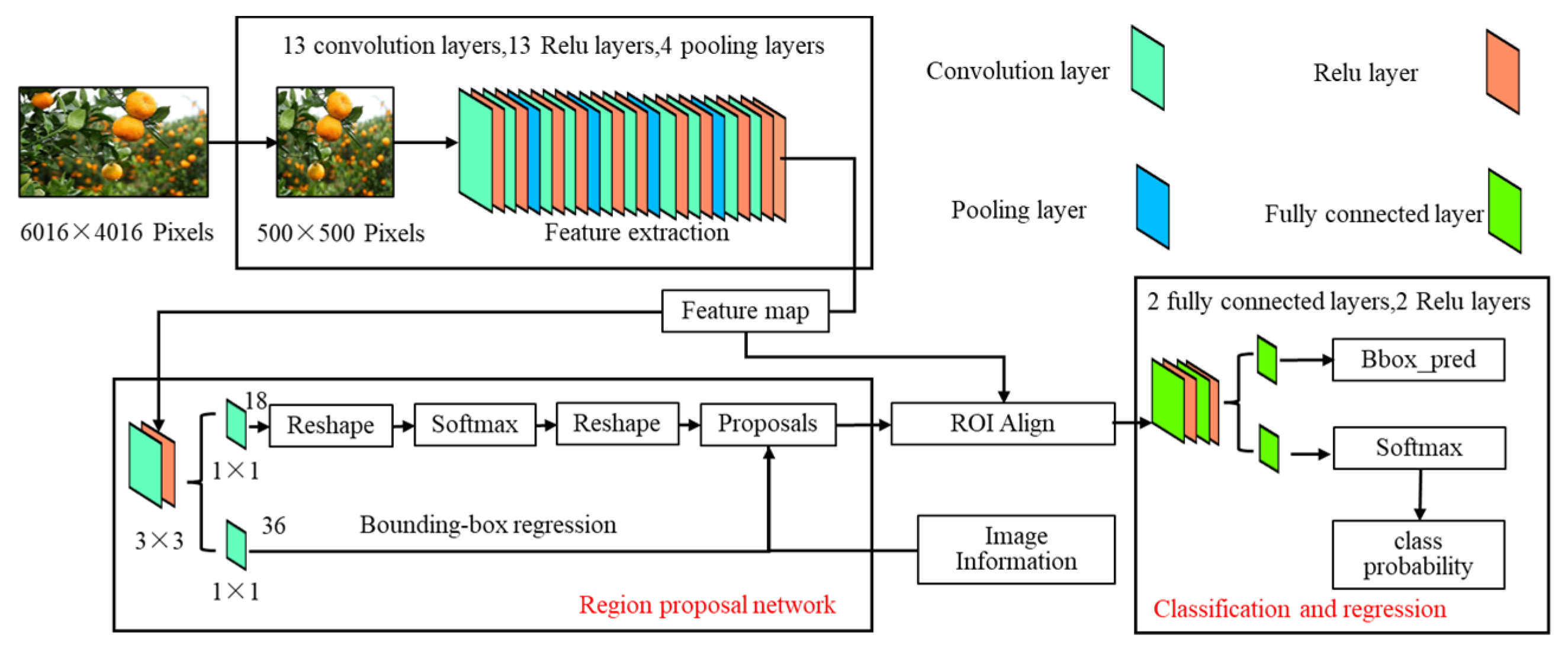
- (1)
- Faster R-CNN model
- (2)
- FPNs (Feature Pyramid Networks)
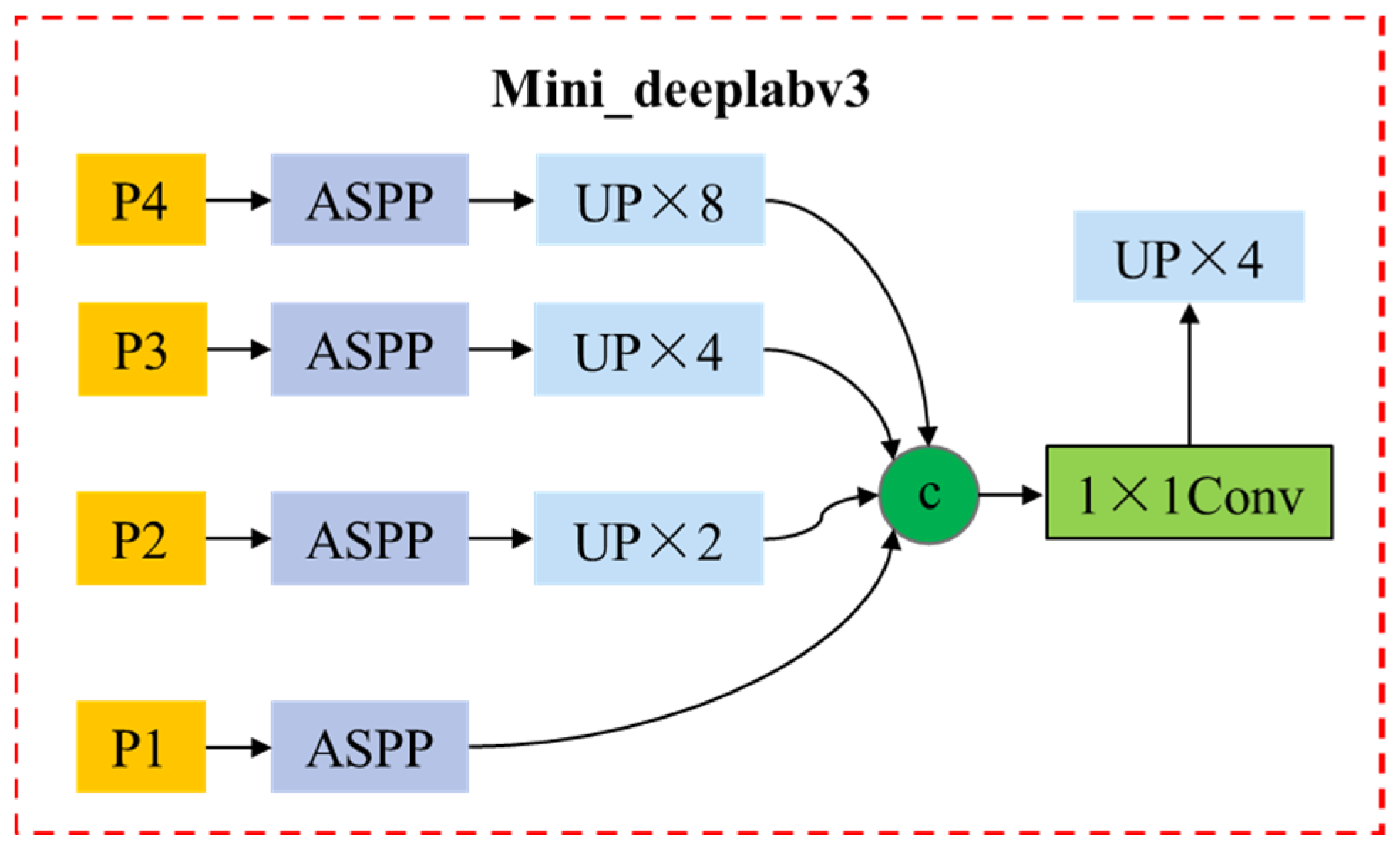
- (3)
- Semantic segmentation module
- (4)
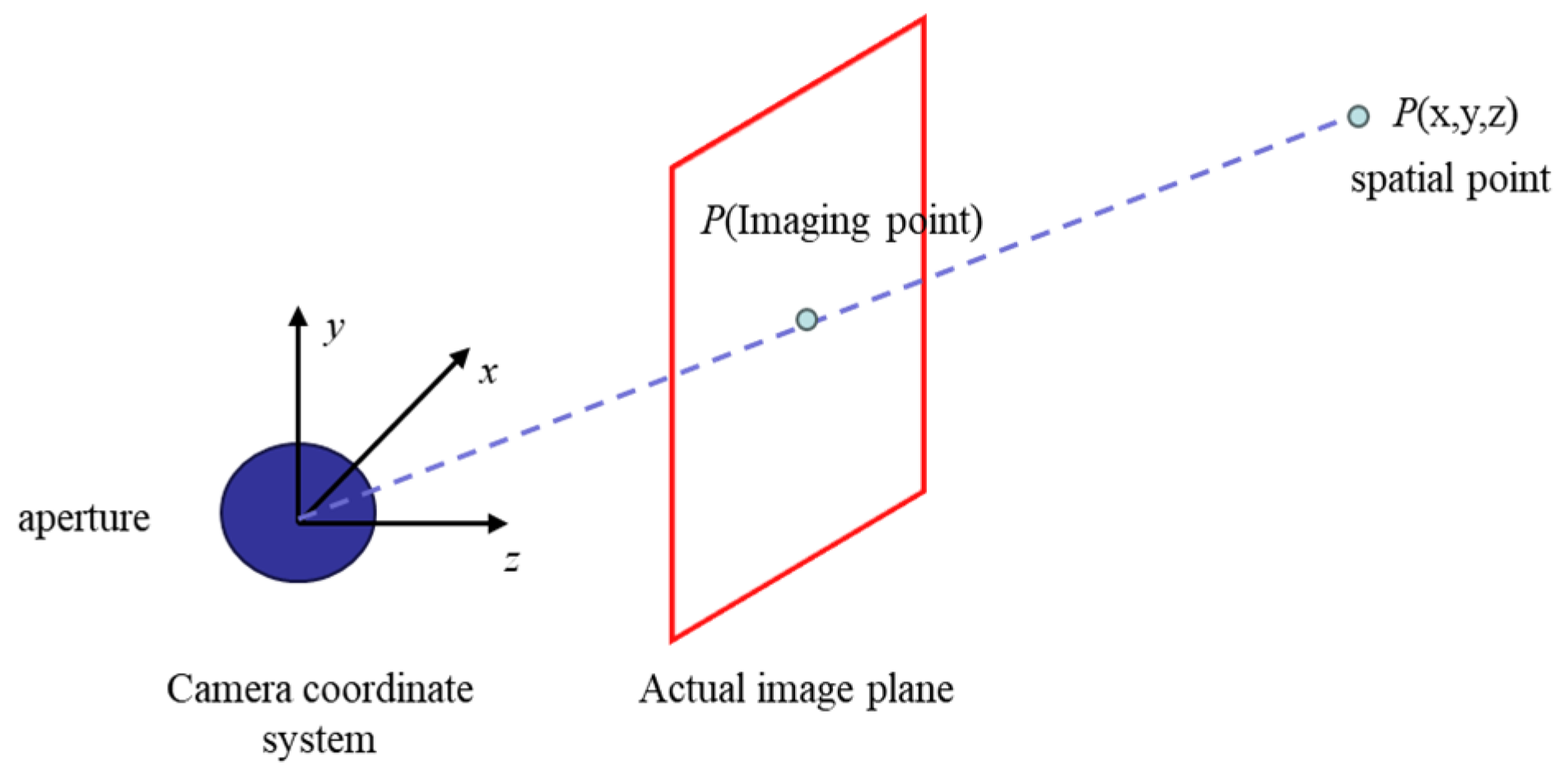
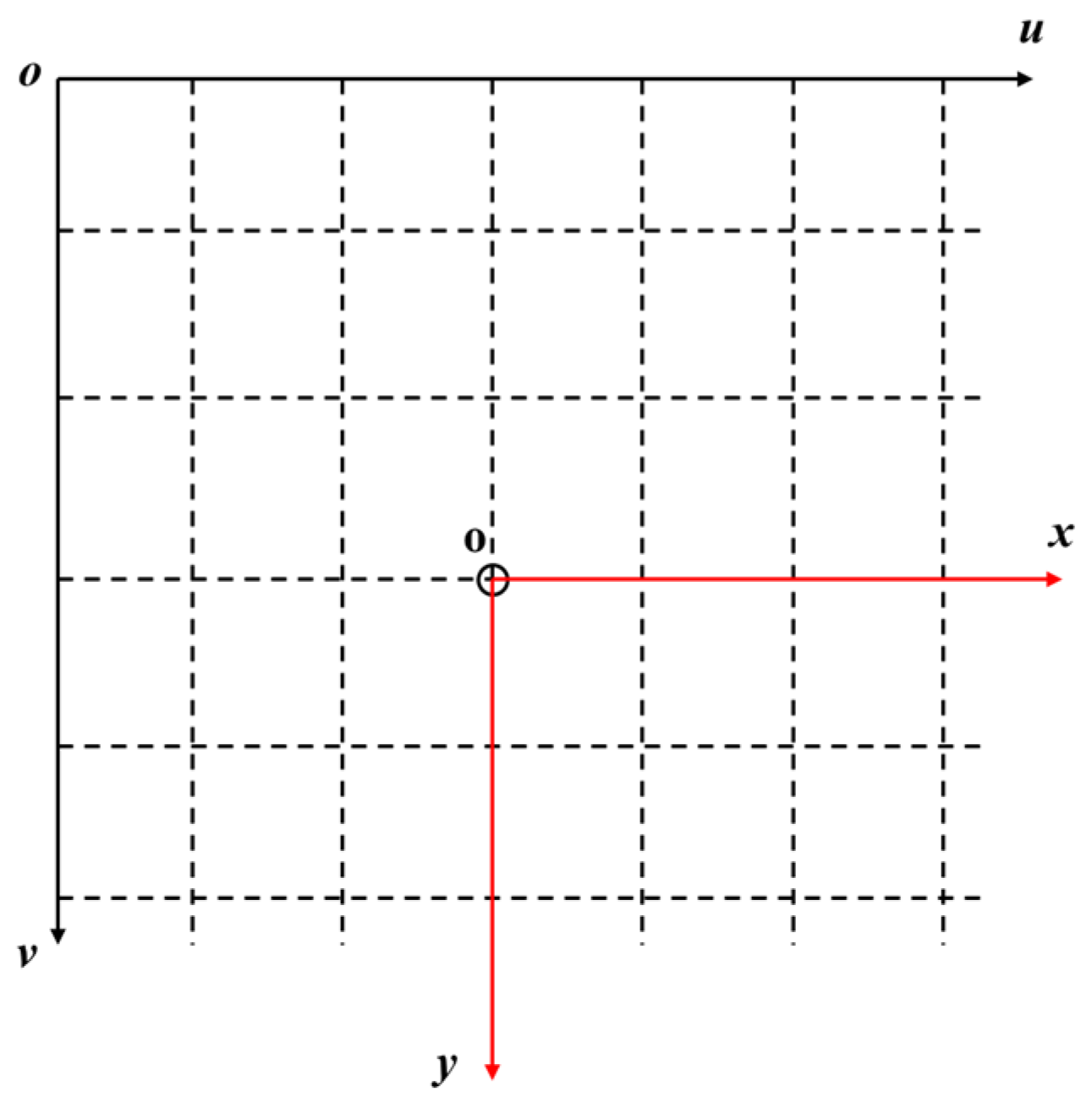
- Citrus fruit pose estimation module
3. Experimental Results and Analysis
3.1. Grab Data Set
3.2. Citrus Image Segmentation Experiment
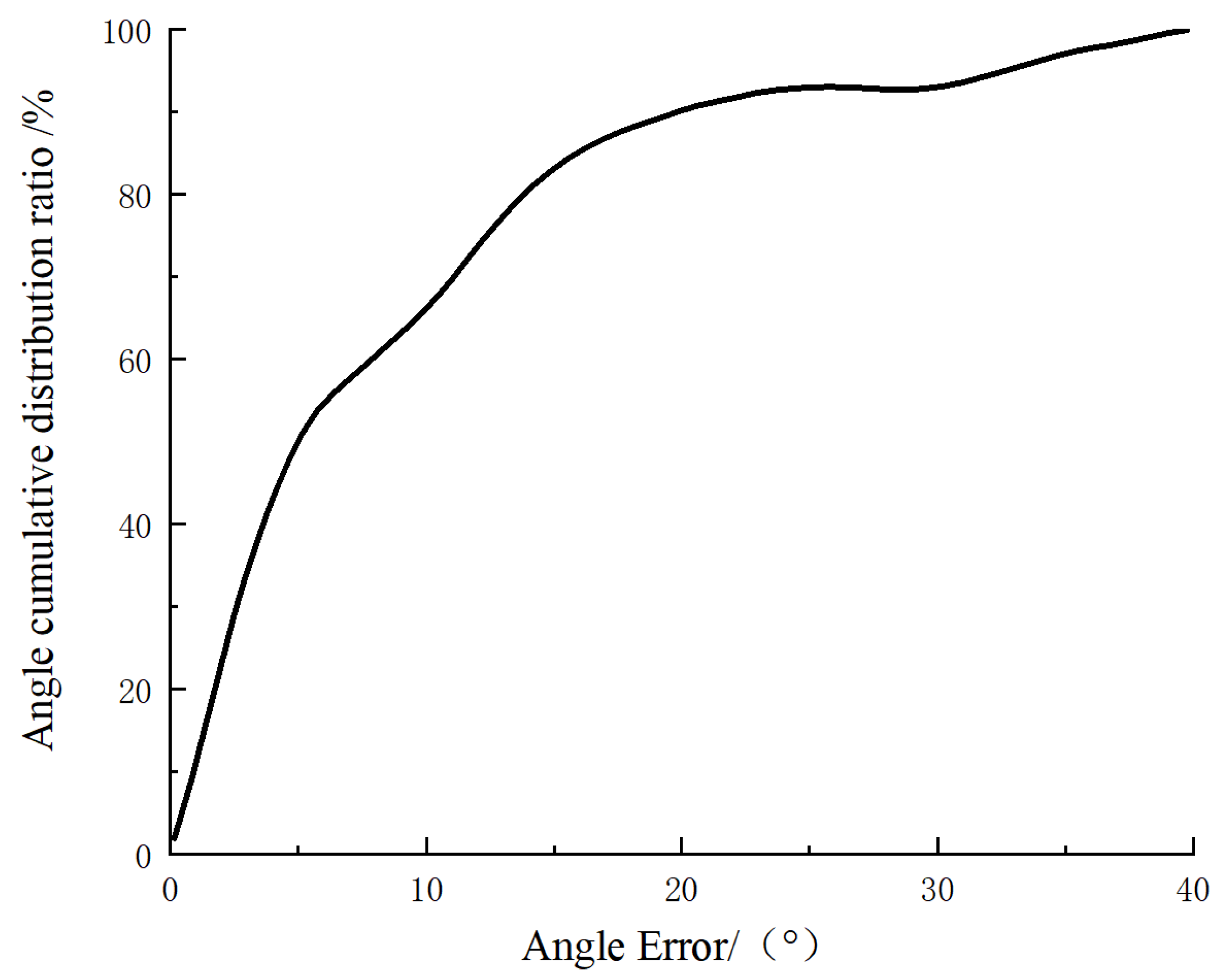
3.3. Estimation of Citrus Fruit Growth Posture
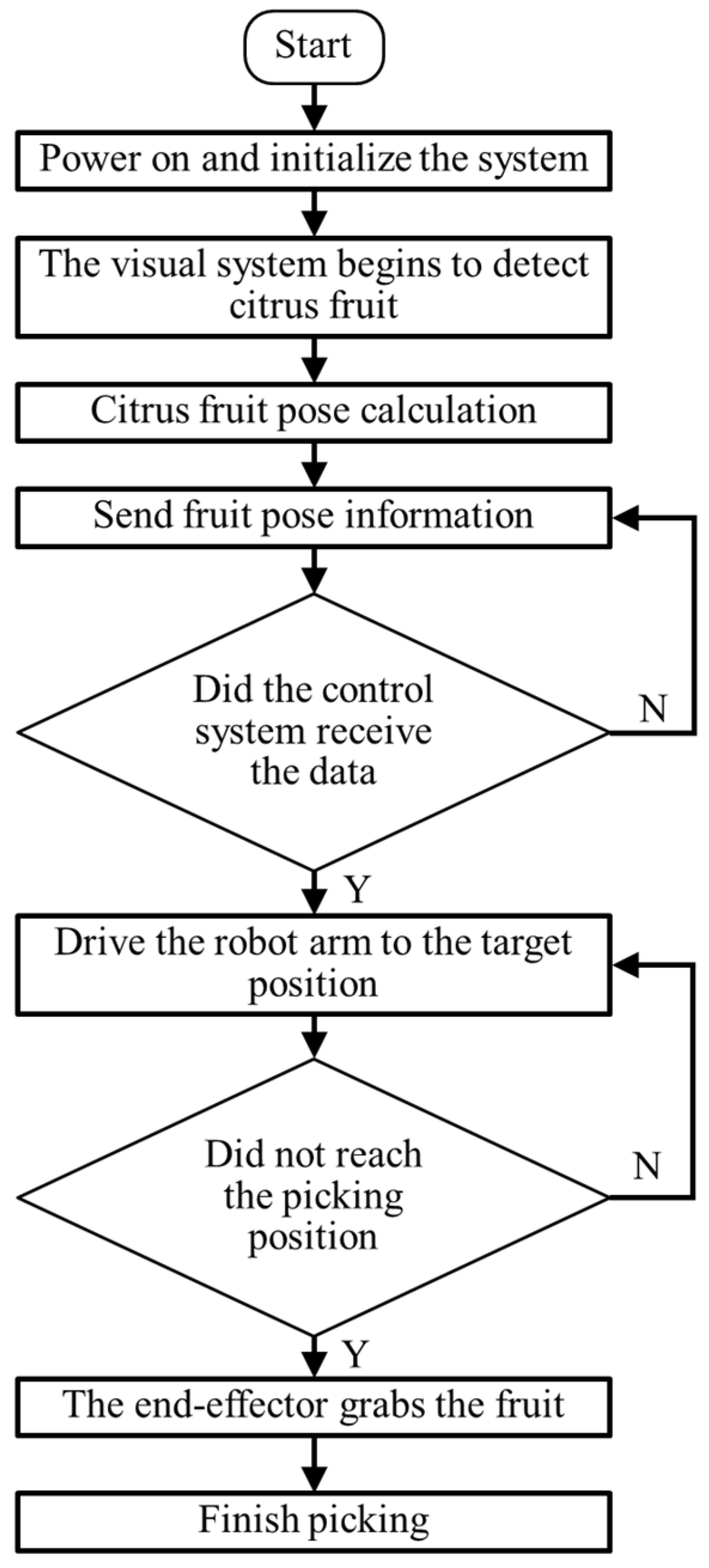
3.4. Field Picking Experiment
4. Conclusions
- (1)
- Aiming at the citrus-picking task of a citrus-picking robot, a single culture pose estimation method based on a semantic segmentation network and rotating target detection is proposed. In the upstream network comparison experiment of the data set constructed by us, the accuracy of the network capture detection proposed in this paper can reach 95.67%.
- (2)
- The citrus picking robot developed based on the algorithm in this paper can accurately reach the target position and pick according to the control instructions. The success rate of picking in the natural environment of the orchard was 85.1%, and the average picking time was 5.6 s, which could meet the requirements for the mechanical picking of citrus.
- (3)
- Judging from the failure of the grasping experiment, the influence of the centroid of citrus fruit and the friction between the end effector and the fruit can be considered in further picking and detection research, which is the focus of the future improvement of the citrus fruit positioning and grasping algorithm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kok, E.; Chen, C. Occluded apples orientation estimator based on deep learning model for robotic harvesting. Comput. Electron. Agric. 2024, 219, 108781. [Google Scholar] [CrossRef]
- Chen, J.; Ma, A.; Huang, L.; Li, H.; Zhang, H.; Huang, Y.; Zhu, T. Efficient and lightweight grape and picking point synchronous detection model based on key point detection. Comput. Electron. Agric. 2024, 217, 108612. [Google Scholar] [CrossRef]
- Zhang, J.; Xie, J.; Zhang, F.; Gao, J.; Yang, C.; Song, C.; Rao, W.; Zhang, Y. Greenhouse tomato detection and pose classification algorithm based on improved YOLOv5. Comput. Electron. Agric. 2024, 216, 108519. [Google Scholar] [CrossRef]
- Zhang, K.; Chu, P.; Lammers, K.; Li, Z.; Lu, R. Active Laser-Camera Scanning for High-Precision Fruit Localization in Robotic Harvesting: System Design and Calibration. Horticulturae 2023, 10, 40. [Google Scholar] [CrossRef]
- Ju, C.; Kim, J.; Seol, J.; Son, H.I. A review on multirobot systems in agriculture. Comput. Electron. Agric. 2022, 202, 107–136. [Google Scholar] [CrossRef]
- Visentin, F.; Castellini, F.; Muradore, R. A soft, sensorized gripper for delicate harvesting of small fruits. Comput. Electron. Agric. 2023, 213, 108202. [Google Scholar] [CrossRef]
- Li, Y.; Liao, J.; Wang, J.; Luo, Y.; Lan, Y. Prototype Network for Predicting Occluded Picking Position Based on Lychee Phenotypic Features. Agronomy 2023, 13, 2435. [Google Scholar] [CrossRef]
- Sun, Q.; Zhong, M.; Chai, X.; Zeng, Z.; Yin, H.; Zhou, G.; Sun, T. Citrus pose estimation from an RGB image for automated harvesting. Comput. Electron. Agric. 2023, 211, 108022. [Google Scholar] [CrossRef]
- Kim, T.; Lee, D.-H.; Kim, K.-C.; Kim, Y.-J. 2D pose estimation of multiple tomato fruit-bearing systems for robotic harvesting. Comput. Electron. Agric. 2023, 211, 108004. [Google Scholar] [CrossRef]
- He, Z.; Wu, K.; Wang, F.; Jin, L.; Zhang, R.; Tian, S.; Wu, W.; He, Y.; Huang, R.; Yuan, L.; et al. Fresh Yield Estimation of Spring Tea via Spectral Differences in UAV Hyperspectral Images from Unpicked and Picked Canopies. Remote Sens. 2023, 15, 1100. [Google Scholar] [CrossRef]
- Shi, Y.; Jin, S.; Zhao, Y.; Huo, Y.; Liu, L.; Cui, Y. Lightweight force-sensing tomato picking robotic arm with a “global-local” visual servo. Comput. Electron. Agric. 2023, 204, 107549. [Google Scholar] [CrossRef]
- Jana, S.; Basak, S.; Parekh, R. Automatic fruit recognition from natural images using color and texture features. In 2017 Devices for Integrated Circuit (DevIC); IEEE: Piscataway, NJ, USA, 2017; pp. 620–624. [Google Scholar]
- Mai, X.; Zhang, H.; Jia, X.; Meng, M.Q.-H. Faster R-CNN with classifier fusion for automatic detection of small fruits. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1555–1569. [Google Scholar] [CrossRef]
- Wan, S.; Goudos, S. Faster R-CNN for multi-class fruit detection using a robotic vision system. Comput. Netw. 2020, 168, 107–126. [Google Scholar] [CrossRef]
- Wang, Y.; He, Z.; Cao, D.; Ma, L.; Li, K.; Jia, L.; Cui, Y. Coverage path planning for kiwifruit picking robots based on deep reinforcement learning. Comput. Electron. Agric. 2023, 205, 107593. [Google Scholar] [CrossRef]
- Xiao, X.; Huang, J.; Li, M.; Xu, Y.; Zhang, H.; Wen, C.; Dai, S. Fast recognition method for citrus under complex environments based on improved YOLOv3. J. Eng. 2022, 2022, 148–159. [Google Scholar] [CrossRef]
- Bac, C.W.; Roorda, T.; Reshef, R.; Berman, S.; Hemming, J.; van Henten, E.J. Analysis of a motion planning problem for sweet-pepper harvesting in a dense obstacle environment. Biosyst. Eng. 2016, 146, 85–97. [Google Scholar] [CrossRef]
- Wang, L.; Wang, Z.; Liu, M.; Ying, Z.; Xu, N.; Meng, Q. Full coverage path planning methods of harvesting robot with multi-objective constraints. J. Intell. Robot. Syst. 2022, 106, 17. [Google Scholar] [CrossRef]
- Fang, Z.; Liang, X. Intelligent obstacle avoidance path planning method for picking manipulator combined with artificial potential field method. Ind. Robot: Int. J. Robot. Res. Appl. 2022, 49, 835–850. [Google Scholar] [CrossRef]
- Yang, H.; Chen, L.; Ma, Z.; Chen, M.; Zhong, Y.; Deng, F.; Li, M. Computer vision-based high-quality tea automatic plucking robot using Delta parallel manipulator. Comput. Electron. Agric. 2021, 181, 105946. [Google Scholar] [CrossRef]
- Ye, L.; Duan, J.; Yang, Z.; Zou, X.; Chen, M.; Zhang, S. Collision-free motion planning for the litchi-picking robot. Comput. Electron. Agric. 2021, 185, 106–151. [Google Scholar] [CrossRef]
- Budijati, S.M.; Iskandar, B.P. Dynamic programming to solve picking schedule at the tea plantation. Int. J. Eng. Technol. 2018, 7, 285–290. [Google Scholar] [CrossRef]
- Li, H.; Qi, C.; Gao, F.; Chen, X.; Zhao, Y.; Chen, Z. Mechanism design and workspace analysis of a hexapod robot. Mech. Mach. Theory 2022, 174, 104917. [Google Scholar] [CrossRef]
- Cao, X.; Zou, X.; Jia, C.; Chen, M.; Zeng, Z. RRT-based path planning for an intelligent litchi-picking manipulator. Comput. Electron. Agric. 2019, 156, 105–118. [Google Scholar] [CrossRef]
- Feng, Q.; Wang, G.; Wang, S.; Wang, X. Tomato’s mechanical properties measurement aiming for auto-harvesting. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 585, p. 012120. [Google Scholar]
- Zhang, Y.; Chen, Y.; Song, Y.; Zhang, R.; Wang, X. Finding the lowest damage picking mode for tomatoes based on finite element analysis. Comput. Electron. Agric. 2023, 204, 107536. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, X.; Wang, C. A review on structural development and recognition–localization methods for end-effector of fruit–vegetable picking robots. Int. J. Adv. Robot. Syst. 2022, 19, 17–30. [Google Scholar] [CrossRef]
- Chen, S.; Xiong, J.; Jiao, J.; Xie, Z.; Huo, Z.; Hu, W. Citrus fruits maturity detection in natural environments based on convolutional neural networks and visual saliency map. Precis. Agric. 2022, 23, 1515–1531. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, B.; Fan, J.; Hu, X.; Wei, S.; Li, Y.; Qian, Z.; Wei, C. Development of a tomato harvesting robot used in greenhouse. Int. J. Agric. Biol. Eng. 2017, 10, 140–149. [Google Scholar]
- Xu, L.; Wang, Y.; Shi, X.; Tang, Z.; Chen, X.; Wang, Y.; Zou, Z.; Huang, P.; Liu, B.; Yang, N.; et al. Real-time and accurate detection of citrus in complex scenes based on HPL-YOLOv4. Comput. Electron. Agric. 2023, 205, 107590. [Google Scholar] [CrossRef]
- Li, Y.; He, L.; Jia, J.; Lv, J.; Chen, J.; Qiao, X.; Wu, C. In-field tea shoot detection and 3D localization using an RGB-D camera. Comput. Electron. Agric. 2021, 185, 106149. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Model | The Average Blending Ratio of Fruits | Average Pixel Accuracy of the Fruit | Average Crossover Ratio of Growing Branches | Average Pixel Accuracy of Growing Branches |
|---|---|---|---|---|
| AFPN | 89.96 | 95.67 | 78.62 | 75.62 |
| Masked Fusion | 87.94 | 91.45 | 75.21 | 70.53 |
| FFB6D | 85.12 | 92.88 | 72.44 | 69.52 |
| PR-GCN | 81.08 | 88.73 | 78.54 | 73.39 |
| PVN3D | 85.48 | 88.90 | 72.25 | 74.54 |
| Number of Pick Attempts | Number of Successful Locations | Number of Picking Successes | Positioning Success Rate | Picking Success Rate | |
|---|---|---|---|---|---|
| 1 | 200 | 187 | 166 | 93.5 | 83 |
| 2 | 200 | 179 | 158 | 89.5 | 79 |
| 3 | 200 | 169 | 160 | 84.5 | 80 |
| 4 | 200 | 174 | 166 | 87 | 83 |
| 5 | 200 | 171 | 162 | 85.5 | 81 |
| 6 | 200 | 159 | 150 | 79.5 | 75 |
| 7 | 200 | 162 | 160 | 81 | 80 |
| 8 | 200 | 184 | 179 | 92 | 89.5 |
| 9 | 200 | 188 | 181 | 94 | 90.5 |
| 10 | 200 | 170 | 166 | 85 | 83 |
| Total | 2000 | 1743 | 1648 | 87.15 | 82.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, X.; Wang, Y.; Jiang, Y.; Wu, H.; Zhou, B. Monocular Pose Estimation Method for Automatic Citrus Harvesting Using Semantic Segmentation and Rotating Target Detection. Foods 2024, 13, 2208. https://doi.org/10.3390/foods13142208
Xiao X, Wang Y, Jiang Y, Wu H, Zhou B. Monocular Pose Estimation Method for Automatic Citrus Harvesting Using Semantic Segmentation and Rotating Target Detection. Foods. 2024; 13(14):2208. https://doi.org/10.3390/foods13142208
Chicago/Turabian StyleXiao, Xu, Yaonan Wang, Yiming Jiang, Haotian Wu, and Bing Zhou. 2024. "Monocular Pose Estimation Method for Automatic Citrus Harvesting Using Semantic Segmentation and Rotating Target Detection" Foods 13, no. 14: 2208. https://doi.org/10.3390/foods13142208
APA StyleXiao, X., Wang, Y., Jiang, Y., Wu, H., & Zhou, B. (2024). Monocular Pose Estimation Method for Automatic Citrus Harvesting Using Semantic Segmentation and Rotating Target Detection. Foods, 13(14), 2208. https://doi.org/10.3390/foods13142208