Abstract
The niche situation can reflect the advantages and disadvantages of biological individuals in the ecosystem environment as well as the overall operational status of the ecosystem. However, higher-order niche systems generally exhibit complex nonlinearities and parameter uncertainties, making it difficult for traditional Type-1 fuzzy control to accurately handle their inherent fuzziness and environmental disturbances in complex environments. To address this, this paper introduces the backstepping control method based on Type-2 T-S fuzzy control, incorporating the niche situation function as the consequent of the T-S backstepping fuzzy control. The stability analysis of the system is completed by constructing a Lyapunov function, and the adaptive law for the parameters of the niche situation function is derived. This design reflects the tendency of biological individuals to always develop in a direction beneficial to themselves, highlighting the bio-inspired intelligent characteristics of the proposed method. The results of case simulations show that the Type-2 backstepping T-S fuzzy control has significantly superior comprehensive performance in dealing with the complexity and uncertainty of high-order niche situation systems compared with the traditional Type-1 control and Type-2 T-S adaptive fuzzy control. These results not only verify the adaptive and self-development capabilities of biological individuals, as well as their efficiency in environmental utilization, but also endow this control method with a solid practical foundation.
1. Introduction
The niche, as a core concept in ecology, provides crucial guidance for ecological management and conservation. Within ecosystems, the survival and development of biological organisms are intimately tied to their niche status. This status not only intuitively reflects the adaptive advantages or disadvantages of individuals in their environment but also serves as a key indicator for assessing the overall health and dynamics of the ecosystem [1]. With the continuous process of biological evolution, higher-order niche systems have increasingly demonstrated complex nonlinear characteristics and significant uncertainties. This dual complexity renders conventional linear or simple nonlinear modeling methods inadequate to accurately describe and effectively control such systems. While Type-1 fuzzy control can handle certain types of imprecise information, its reliance on fixed and precise membership functions limits its ability to capture the inherent fuzziness and uncertainty in niche perception and environmental disturbances. As a result, it falls short of meeting the precision required for dynamic ecosystem regulation.
Li et al. pioneered a fuzzy control method based on niche modeling [2,3]. By integrating the “state” and “potential” theory of niches into the T-S fuzzy framework, they replaced the traditional linear or constant consequent parts in fuzzy rules with niche-based variables. This innovation allowed the fuzzy rules to directly embody the adaptive principle that “biological organisms always develop in a self-beneficial direction” [4]. However, as this method was built on Type-1 fuzzy sets, its predetermined membership functions could not fully represent the dual complex characteristics of niche systems.
In contrast, Type-2 fuzzy sets extend the capabilities of Type-1 fuzzy sets by handling uncertainties in membership degrees themselves, which significantly broadens their application range and enhances robustness against disturbances and uncertainties. The use of interval Type-2 fuzzy sets for fuzzifying inputs or outputs can also reduce computational complexity, improving practicality for real-time control [5,6]. The experimental results in [7] demonstrated that interval Type-2 T-S fuzzy models achieve an accuracy improvement of over 30% compared to Type-1 models when fitting uncertain parameters. Studies [8,9] further confirmed the superior performance of interval Type-2 fuzzy models in managing complex systems and uncertainties. Additionally, the study in [10] combined evolutionary and adaptive biological characteristics with direct Type-2 T-S fuzzy control to develop a bio-inspired control strategy. Comparative simulations revealed that Type-2 controllers outperform Type-1 in stability and convergence. Nevertheless, existing Type-2 fuzzy methods predominantly address “single uncertainty” and remain insufficiently optimized for the “high-order nonlinearity” of niche systems. As system order increases beyond two, control errors accumulate and convergence time lengthens [5,6,7].
The backstepping control method, proposed by Krstic [11] in 1995, is a nonlinear control approach that eliminates the traditional requirement for nonlinear functions to satisfy “matching conditions”. When systems exhibit complexities such as parametric uncertainties, unknown nonlinearities, and structural uncertainties, the adaptive fuzzy backstepping control method effectively addresses these challenges: fuzzy systems approximate unknown nonlinear functions, ensuring the system output asymptotically and stably tracks the desired reference signal while maintaining uniform boundedness of all closed-loop signals, thereby significantly enhancing robustness and stability [12,13]. In addition to handling general nonlinearities, the backstepping control method has also been successfully applied in other fields requiring high-precision control; for example, reference [14] applied this method to high-order trajectory tracking in quadrotor unmanned aerial vehicles (UAVs), reducing convergence time by 40%; the authors of [15] developed a nonlinear strategy for pneumatic manipulators by integrating an adaptive extended state observer (AESO) with a backstepping integral sliding mode controller (BISMC), validating its effectiveness and superiority through comparative experiments. The authors of [16] designed a novel fast fixed-time backstepping method that further improves convergence speed and system stability. However, these methods have not been integrated with the “state-potential” characteristics of ecological niches and thus fail to reflect the biological principle of “development toward beneficial conditions”.
In recent years, many scholars have integrated the backstepping control into Type-2 fuzzy systems for research. In [17], the authors incorporated backstepping into a Type-2 T-S fuzzy control framework. They employed an exponential symmetric function composed of ecological factors as the consequent part of the backstepping controller. This integration of “ecological factor + control method” provides a design reference for using niche state-potential functions as consequents in fuzzy rules. For uncertain discrete nonlinear systems, Boukhalfa and Khettab [18] proposed a hybrid backstepping Type-2 fuzzy adaptive control (HBT2AC) scheme, and they designed an adaptive Type-2 fuzzy controller that uses a derived weighted simplified least squares (WSLS) estimator to approximate unmeasurable states and adjustable parameters. The study in [19] combined backstepping with artificial intelligence (Type-1 and Type-2 fuzzy logic) in wind energy conversion systems, achieving high-precision power control and demonstrating the complementary advantages of “Type-2 handling uncertainty + backstepping handling nonlinearity”. For SISO nonlinear systems with unmeasurable states, Chouelkn and Kermani [20] proposed fuzzy adaptive backstepping control (FABC) and fuzzy adaptive backstepping sliding mode control (FABSMC), with comparative analysis of these adaptive schemes providing valuable insights for optimizing Type-2 fuzzy and backstepping control.
To further reduce system errors and enhance stability and anti-interference capabilities, researchers have in recent years explored the integration of intelligent optimization algorithms with fuzzy control. The study in [21] proposed an improved variable-step MPPT method based on the grey wolf optimizer (GWO) and whale optimization algorithm (WOA), which was combined with a PID controller in photovoltaic systems, effectively optimizing output power. The study in [22] introduced the grey wolf optimizer (GWO) into the direct torque control of double-star induction motors, improving control accuracy and dynamic response speed. The study in [23] confirmed through comparative validation that the variable-step MPPT algorithm optimized by GWO and WOA significantly enhances the power tracking efficiency and stability of photovoltaic systems. These research results on intelligent optimization algorithms not only provide novel tools for improving the control performance of complex nonlinear systems but also offer new insights for algorithm optimization and performance improvement, supporting subsequent studies—including the integration of Type-2 T-S backstepping fuzzy control with niche state-potential properties as proposed in this paper.
Therefore, building on Type-2 T–S fuzzy control, this paper introduces the backstepping control method, adopts the niche state-potential function as the consequent of the backstepping fuzzy controller, derives adaptive laws for the ecological factors within the function, and performs stability analysis using Lyapunov theory.
The main innovations of this paper are as follows: (1) To address the high-order complex nonlinearity and parametric uncertainties exhibited by evolved high-order niche systems, this study overcomes the limitations of Type-1 T–S fuzzy control and proposes a composite control method that integrates Type-2 T–S fuzzy control with backstepping control. This approach leverages both the ability of Type-2 fuzzy systems to handle membership function uncertainties and the layered design advantages of backstepping control for nonlinear systems, enabling effective regulation of high-order complex nonlinear systems. (2) The niche state-potential function is adopted as the consequent part of the T–S backstepping fuzzy controller, replacing traditional linear or constant output forms. This establishes a direct relationship between the control rules and the “state-potential” characteristics of the ecosystem. Meanwhile, the stability of the system is analyzed via the construction of a Lyapunov function, and adaptive laws for the parameters of the niche state-potential function are derived, ensuring asymptotic stability of the system. (3) The derived adaptive laws for the niche state-potential function parameters embody the ecological principle of “self-beneficial development”, highlighting the bio-inspired intelligent nature of the proposed method. (4) Multi-dimensional comparative verification is conducted through case simulations to confirm the effectiveness of the proposed composite control method: On one hand, by comparing the Type-2 and Type-1 backstepping control methods, it is quantitatively concluded that the Type-2 control shortens the convergence time by approximately 13.3% and reduces the dynamic error by about 40%, which verifies the advantages of the composite method in stability and convergence. On the other hand, through the comparison of reference signal tracking and the verification of anti-interference performance between the Type-2 backstepping control (the proposed method) and the Type-2 T-S adaptive fuzzy control, the comprehensive performance advantages of the proposed method in complex scenarios are further highlighted. At the same time, combined with all simulation results, the adaptive and self-development capabilities of biological individuals as well as their efficiency in environmental utilization are verified, endowing this control method with a more solid practical physical background.
The paper is organized as follows: Section 2 introduces the theory and inference mechanism of Type-2 bio-inspired fuzzy systems and presents the structure and design algorithm of Type-2 backstepping T–S control. Section 3 describes the design of the Type-2 backstepping T-S fuzzy controller for niche state-potential and the corresponding adaptive laws. Section 4 validates the effectiveness of the method through numerical simulations. Section 5 summarizes the research conclusions.
2. System Description and Type-2 Fuzzy Modeling
For clarity, the main mathematical notations and definitions used in this paper are summarized in Table A2 of the Appendix A.
Consider the following form of an n-th order SISO nonlinear system:
where is the measurable state vector; and are unknown continuously nonlinear functions; is the continuously differentiable control input; and is the output of the system.
To ensure the stability of the control system, this paper introduces the following assumption:
Assumption 1.
The control gain function is strictly positive, and there exist known positive constants and such that 0 < holds for all state vectors .
2.1. Rules for a Type-2 Bionic Fuzzy Inference System
When modeling in system (1), the niches are represented by the variable , with the niche fuzzy sets serving as the antecedent of the fuzzy rules and the overall “state and potential” serving as the consequent of the fuzzy rules. The following fuzzy rules are established:
Among them, denotes the i-th fuzzy rule; is the Type-2 ecological niche fuzzy set of the k-th individual organism; is the output of the i-th rule; is determined by the “state” and “potential” of the niche of the biological individual, representing the total ”state and potential” of the biological individual.
Here, we define , Among them, represents the component of the k-th “state” in the i-th rule, represents the component of k-th “potential” in the i-th rule, and is a dimension coordination factor that coordinates the dimensions of the two to achieve additivity.
2.2. Bionic Fuzzy Inference System
The steps to build a Type-2 fuzzy system are as follows:
Using single-point fuzzification for the system input , Equation (3) can be changed into
The output Type-2 fuzzy sets can be represented by , where using the center-of-sets reducer, it can be expressed as:
Using the Type-2 affiliation function to , Equation (5) can be transformed into
where , .
To obtain the crisp value of the type-reduced interval, this paper employs the KM iteration method [24] to calculate the left and right endpoints, and , respectively. The specific calculation process is as follows:
Assumption 2.
In order to adjust the parameters in the fuzzy logic system, the optimal parameters , , and are defined as follows:
3. Design Type-2 Controller with Backstepping
The following is the specific design process and proof:
Step 1: Define the system tracking error:
where .
With the derivation of Equation (9) with respect to time, we obtain .
Substitute (from Equation (1) when ) into the above formula .
To facilitate the design of the virtual controller, rearrange the terms by factoring out (using > from Assumption 1, the sign of remains unchanged during rearrangement):
To stabilize the error , we treat as a virtual controller and define its ideal form as:
where is a normal number.
Substitute into Equation (10), and Equation (10) becomes since > (Assumption 1) and > , the error derivative satisfies the convergence trend: when > , < ; when < , > .
Because is an unknown function, the function, although bounded, is also an unknown and imprecise function, making it difficult to obtain an ideal controller. To solve this problem, Type-2 T-S fuzzy logic systems and can be used to approximate the unknown function , obtaining
Let , then we have
Let (where denotes the error between the actual and the approximate virtual controller ) and define as follows:
Then Equation (10) is updated to the complete error dynamic equation considering approximation errors and parameter uncertainties:
where
Consider the following Lyapunov function:
Then the derivative of is
The adaptive laws are designed as follows:
where , are given positive real numbers.
Substituting the adaptive law of Equation (17) into the derivative of the Lyapunov function yields the simplified result:
The adaptive law of ecological factor parameters in the niche situation function is derived using the gradient descent method. These parameters are specifically updated for the niche situation function (serving as the consequent part of fuzzy rules) to reflect the bionic characteristic of biological individuals “developing in directions beneficial to themselves”. The specific forms include the following:
A similar expression can be obtained for the function.
Using the methodology of the literature of [25], it is proved out:
where and are positive real numbers.
The parameters of the niche equality index function are derived, and the adaptive law of the parameters is obtained using the gradient descent method. Equations (9)–(21) utilize the adaptive law to adjust the parameters by defining the error, the virtual controller, and introducing the Lyapunov function to ensure the stability and tracking performance of the system; these are the key steps of the backstepping control method.
Step : As with the method in the first step, define
By differentiating , we obtain
Consider as a virtual controller and define
where is a normal number.
Using Type-2 T-S fuzzy logic systems and to approximate the unknown function , we obtain
Considering as , then Equation (23) reads as follows:
where , , .
Consider the following Lyapunov function:
Adopt a method completely similar to the first step, take the derivative of with respect to time, and we have
Select the following adaptive rate:
where , are given positive real numbers. , , , and others can be similarly expressed.
According to the adaptive law obtained from (30), there are
Adopt a method similar to the first step, take the derivative of the parameters of the niche situation function and use the gradient descent method to obtain the parameter adaptive law of the niche situation function:
Bringing Equation (30) to Equation (29) gives
Similarly, the parameters of the niche equality index function are derived, and the adaptive law of the parameters is obtained using the gradient descent method. The subsequent steps are similar to the first step, which is gradually derived, and the parameter adaptive law is adjusted by continuously defining new errors, virtual controllers, and introducing Lyapunov functions, so as to gradually construct the complete controller to achieve the effective control of the system. Every step is taken on the premise of guaranteeing the stability of the system to advance towards the final controller design.
Step n: This is the last step and will derive the actual controller for this method.
Define , and take the derivative:
According to Assumption 1, the control gain function > 0 and has a lower bound > 0; so the actual controller is defined as follows:
where , , .
Choose the final Lyapunov function as:
where , , , and similar expressions.
Deriving the above Equation (37), we have
Select the adaptive rate as follows:
where , are given positive real numbers. , , . Other parameters such as can be expressed similarly.
According to the adaptive law obtained from (39), there are
Then the parameters of the niche situation function are derived, and the gradient descent method is used to obtain the parameter adaptive rate of the niche situation function:
Substituting (39) into (38) yields
Choose an appropriate such that , then
where is a positive constant, and
Then it can be deduced from (44) that
According to (45), we can obtain
It can be seen that the signals , , , , , , , , , and are all globally uniformly ultimately bounded, and . To make the tracking error converge to a small neighborhood around zero, the parameters ρ and δ must take appropriate values such that is sufficiently small. Let . Since , , there exists T, when t ≥ T, , and thus .
4. Example Simulation
Equation for cerebral aneurysms with damping terms:
In the equation, denotes the blood flow velocity within the cerebral aneurysm, denotes the rate of change of blood flow, denote the resistance to blood flow, denotes the amplitude of the blood flow impulse, and represents heartbeat frequency.
Let , then the driving system is
Let , the response system is
When the parameters and the initial values are taken as , the system exhibits a chaotic state, as shown in Figure 1, and the two-variable operating curves are shown in Figure 2.
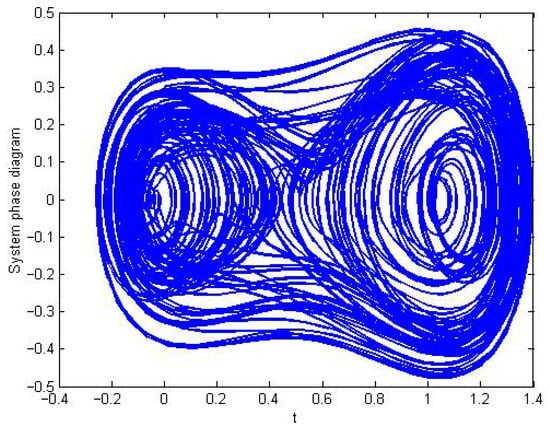
Figure 1.
Chaotic state of the uncontrolled system.
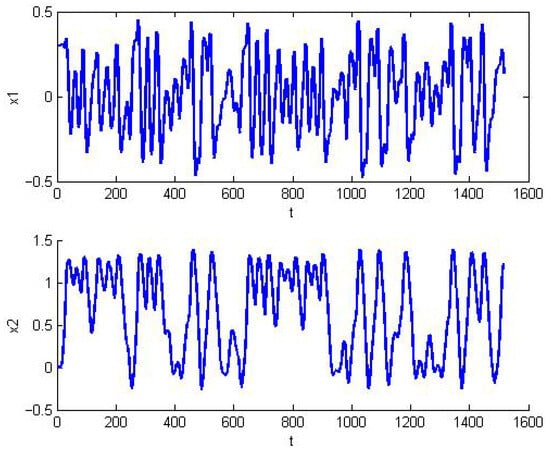
Figure 2.
Two series of the system state variables.
Figure 1 indicates that the system exhibits chaotic behavior in the absence of control. Figure 2 shows large fluctuations in the two variables, with significant oscillations present in the uncontrolled system. The system fails to maintain stability, possibly due to external disturbances. Throughout the observed duration, the state variables do not converge and continue to fluctuate. The Type-2 adaptive backstepping fuzzy control design process is specified as follows:
Step 1: Define the Type-2 affiliation function:
The fuzzy basis function is
Step 2: We assume that the following language rules exist for the unknown functions 1, 2, respectively:
The fuzzy rule for the unknown function 1 is as follows:
The fuzzy rule for the unknown function 2 is as follows:
Step 3: Design parameters are specified as follows:
The first intermediate controller is designed as follows:
The first intermediate adaptive law is designed as follows:
The second intermediate controller is designed as follows:
The second intermediate adaptive law is designed as follows:
It can be seen from Figure 3 that after the system incorporates the Type-2 adaptive backstepping fuzzy controller, it undergoes a fundamental transformation, rapidly changing from a chaotic state to a stable and convergent state. The control method effectively suppresses chaotic oscillations. Figure 4 shows that the state variables quickly converge to near zero, which proves the excellent convergence and robustness of the controller.
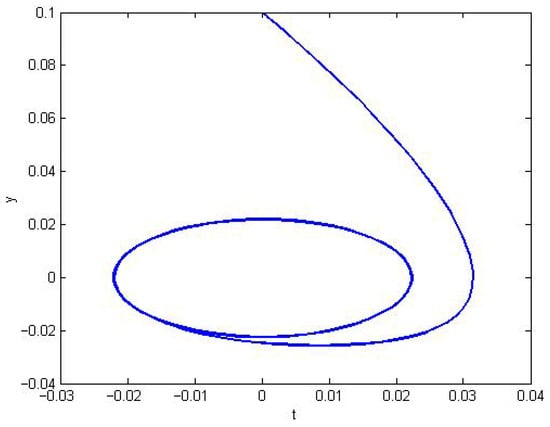
Figure 3.
System states after applying control.
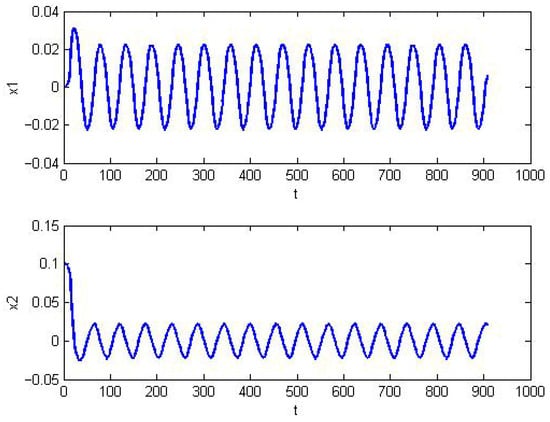
Figure 4.
Time series of state variables after control.
Figure 5 presents a comparative analysis of the control performance between the Type-2 and Type-1 adaptive backstepping controllers. The analysis shows the following: 1. Compared with the Type-1 controller, the Type-2 controller exhibits superior convergence performance. Its response curve can approach and stabilize near the target value more quickly. Quantitative analysis indicates that its convergence time is approximately 13.3% shorter than that of the Type-1 controller, demonstrating better convergence speed. 2. In terms of oscillation suppression and steady-state maintenance, the Type-2 controller performs significantly better, with a smaller fluctuation amplitude and smoother control effect. The dynamic error (peak–valley deviation) is reduced by about 40% compared with the Type-1 controller. Overall, the Type-2 adaptive backstepping control strategy demonstrates stronger robustness and a better control effect than the Type-1 strategy in handling system uncertainties. The quantitative data of the above qualitative analysis have been organized in Table A1.
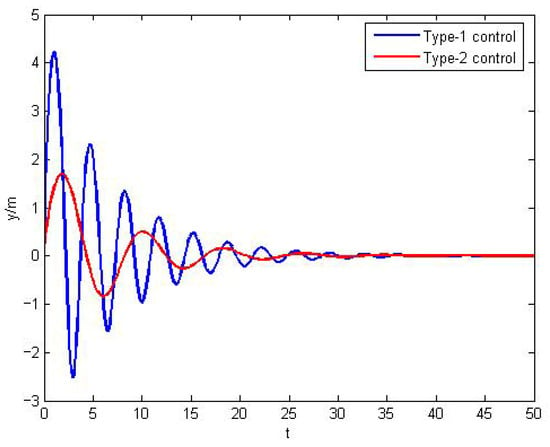
Figure 5.
Comparison of convergence plots of two control methods.
Figure 6 shows that the controller and adaptive law designed based on Lyapunov stability theory can indeed ensure the global stability of the entire closed-loop system, and all signals are uniformly ultimately bounded.
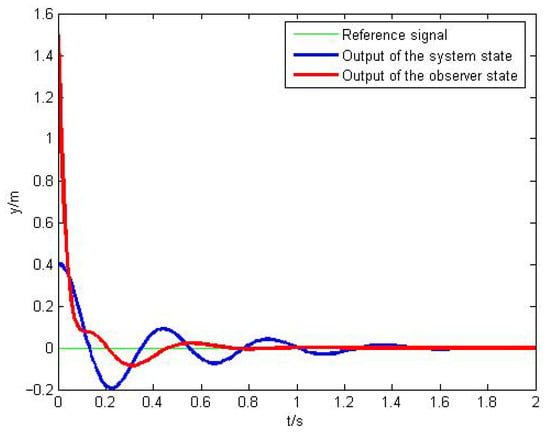
Figure 6.
Diagram of system state and signal state after control.
To further verify the effectiveness of the Type-2 T-S backstepping control method, an analytical comparison was conducted between the Type-2 T-S backstepping control and the Type-2 T-S adaptive fuzzy control, as shown in Figure 7. Among them, the green solid line represents the reference signal, the red dashed line represents the Type-2 T-S backstepping control, and the blue solid line represents the Type-2 T-S adaptive fuzzy control. It can be seen from Figure 7 that the Type-2 T-S backstepping control method can track the reference signal quickly and stably, approaching the reference signal and maintaining stability within a short period of time. In contrast, the Type-2 T-S adaptive fuzzy control exhibits large fluctuations in the initial stage, and it takes a long time to adjust before gradually stabilizing, with a large fluctuation range during the adjustment process.
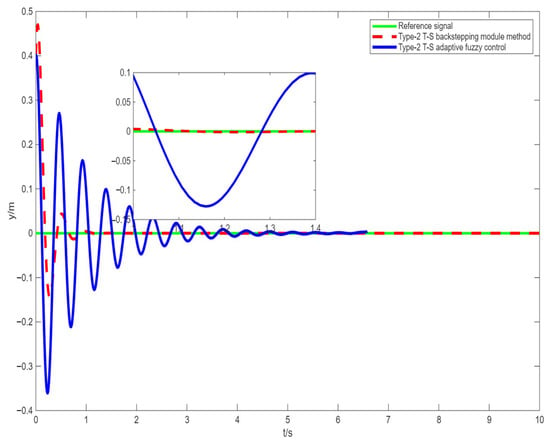
Figure 7.
Comparison diagram of reference signal tracking.
Figure 8 shows the variation in the system output over time under Type-2 backstepping control with and without interference. The blue line represents the system output based on Type-2 backstepping control in the absence of interference: there is oscillation in the initial stage, but the oscillation amplitude is relatively small, and the system output can quickly approach the reference signal. The red dashed line represents the system output under Type-2 backstepping control in the presence of interference; although the oscillation amplitude increases in the initial stage, it gradually approaches the reference signal afterward, indicating that this control method can still function effectively even when interference exists.
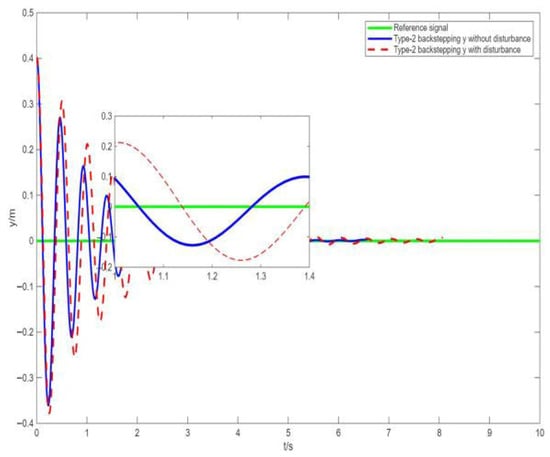
Figure 8.
Anti-interference comparison diagram.
5. Conclusions
This study has addressed the challenge of controlling higher-order niche systems, which are characterized by complex nonlinearities and significant parametric uncertainties. To this end, a novel bio-inspired intelligent control strategy was developed by synergistically integrating interval Type-2 T-S fuzzy logic with the backstepping control framework. The key innovation lies in adopting the niche state-potential function as the consequent of the fuzzy rules, thereby directly embedding the ecological principle of “self-beneficial development” into the controller’s core. The global stability of the closed-loop system was rigorously guaranteed via Lyapunov theory, with corresponding adaptive laws derived for the controller parameters.
Comprehensive simulation results on a chaotic system model convincingly demonstrate the superiority of the proposed method. (1) In a comparative analysis, the Type-2 backstepping controller achieved a 13.3% reduction in convergence time and a 40% decrease in dynamic error compared to its Type-1 counterpart, confirming its enhanced performance in convergence speed and steady-state maintenance. (2) Furthermore, when compared to a standard Type-2 T-S adaptive fuzzy controller, the proposed method exhibited significantly better reference signal tracking accuracy and robustness against disturbances. These performance metrics not only validate the control efficacy but also reflect the adaptive and self-optimizing capabilities of biological systems that the method aims to emulate.
While the proposed method entails higher computational complexity than conventional approaches, its significant performance gains in precision and stability make it highly suitable for applications where these factors are critical, such as in ecological system management and other complex nonlinear systems.
In summary, this research contributes both a theoretically sound and practically effective solution for complex system control and provides valuable insights into bio-inspired intelligent design. Future work will focus on streamlining the computational algorithms for real-time implementation and exploring its potential in burgeoning fields like medical robotics and smart energy microgrids.
Author Contributions
Conceptualization, Y.H.; methodology, Y.C.; validation, Y.Q.; investigation, Y.C.; writing—original draft preparation, Y.C.; writing—review and editing, Y.C. and Y.Q.; visualization, Y.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Jiangxi Provincial Key Research and Development Program in High-tech Fields (Grant No. S20252477), the Science and Technology Research Project of Jiangxi Provincial Department of Education in 2024 (Grant No. GJJ2402004), 2024 Pingxiang Science and Technology Program Cultivation Project (Grant No. 2024C0206).
Data Availability Statement
The original contributions presented in the study are included in the article.
Acknowledgments
We are deeply grateful for the constructive feedback provided by the anonymous reviewers.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A

Table A1.
Comparison of Type-2 and Type-1 fuzzy control.
Table A1.
Comparison of Type-2 and Type-1 fuzzy control.
| Comparison Dimension | Conventional Type-1 Backstepping Control | Proposed Type-2 Backstepping T-S Fuzzy Control | Cost vs. Performance Analysis |
| Computational Complexity/Time Cost | Lower, due to the simpler Type-1 fuzzy inference. | Medium-high, primarily due to type-reduction (e.g., KM algorithm) and more online parameters. | The cost is necessary for higher robustness and better handling of uncertainties. |
| Convergence Time (Dynamic Performance) | Baseline (slower convergence). | Approximately 13.3% shorter (see Figure 5 and analysis). | Faster response improves dynamic stability. |
| Dynamic Error/Steady-state Accuracy | Baseline (larger oscillations). | Approximately 40% reduction (see Figure 5 and analysis). | Complex adaptation laws suppress oscillations and improve accuracy. |
| Reference Signal Tracking Performance | Poor, with long settling time and fluctuations (see Figure 7) | Fast, smooth tracking with short settling time (see Figure 7). | The combined method greatly enhances tracking accuracy and smoothness. |
| Disturbance Rejection Capability | Generally weaker (inferred from comparative studies) | Strong. Under disturbance, the system recovers and stabilizes quickly. | Extra computation enables real-time disturbance compensation. |
Table A2.
Symbol table (aligned with article sections).
Table A2.
Symbol table (aligned with article sections).
| Symbol | Definition | Description |
|---|---|---|
| The k-th “state/potential” component of niche in the i-th rule | In the fuzzy rule definition in Section 2.1, they describe, respectively, the niche state and development potential in one dimension under a single rule. | |
| Dimension coordination factor | In the fuzzy rule output formula section of Section 2.1, the dimensions of and are coordinated to enable addition. | |
| System state vector | At the beginning of the system model in Section 2, the set of measurable state variables of the system is represented. | |
| Bounded unknown nonlinear functions/Control gain functions | Equation (1): describes the intrinsic nonlinear dynamics of the systems; characterizes the influence intensity of the control input on the state . | |
| The i-th virtual controller/its ideal form | Section 3: is the actual intermediate control variable in the hierarchical backstepping design; is the ideal form designed based on known nonlinearities, used for stability analysis derivation. | |
| The derivative of the tracking error | Used to analyze the dynamic change process of the error and is an important part in deriving the system stability conditions. | |
| Parameters of niche situation function | These are parameters related to the ”state” of the niche, updated in the consequent part of fuzzy rules to reflect the bionic development characteristics of biological individuals. | |
| Parameters of niche situation function | These are parameters related to the ”potential” of the niche, used to quantify the dynamic potential of biological individuals in utilizing niche resources. | |
| The bounded compact set number | Define the value range of parameters and state variables to prevent parameter overrun during updates. | |
| Given positive real numbers | Used to constrain parameter ranges and adjust gains in fuzzy systems or adaptive laws. | |
| Type-2 T-S fuzzy system parameters (unified indexing) | Section 3: Used to approximate unknown nonlinear functions in the system. Indexing Rule: Type(f/g)-Step(i)-Sequence(j)-Endpoint(l/r). For example, represents the left endpoint parameter for the f function, Step 1, Parameter Set 1. | |
| The optimal parameters | Ideal parameter standard in the adaptive law, used to reduce approximation errors of the system and improve control accuracy. | |
| Type-2 T-S fuzzy logic systems | Used to approximate unknown nonlinear function in the system, supporting controller design and stability analysis |
References
- Rebeca, A.; Margarita, M.; Muñoz, I.; Pascoal, C. Drying shapes the ecological niche of aquatic fungi with implications on ecosystem functioning. Sci. Total Environ. 2022, 859, 160374. [Google Scholar]
- Li, Y. Nonlinear Analysis and Fuzzy Fault-Tolerant Control of Complex Ecosystems. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2005. [Google Scholar]
- Li, Y.; Li, X.; Hua, J. Ecosystem stability and ecological diversity based on complex networks. J. Ecol. 2014, 33, 1700–1706. [Google Scholar]
- Zhang, F. Type-2 Bionic Fuzzy Control Within Input-Output Nonlinear Relationship. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2018. [Google Scholar]
- Patel, H.R.; Shah, V.A. Stable fuzzy controllers via LMI approach for non-linear systems described by type-2 T–S fuzzy model. Int. J. Intell. Comput. Cybern. 2021, 14, 509–531. [Google Scholar] [CrossRef]
- Song, M. H∞ Control for Nonhomogeneous Markovian Switch Type-2 Fuzzy Systems. Master’s Thesis, Hangzhou Dianzi University, Hangzhou, China, 2022. [Google Scholar]
- Yuan, K.; Li, W.; Xu, W.; Zhan, T.; Zhang, L.; Liu, S. A comparative experimental evaluation on performance of type-1 and interval type-2 Takagi–Sugeno fuzzy models. Int. J. Mach. Learn. Cybern. 2021, 12, 2135–2150. [Google Scholar] [CrossRef]
- Liang, S.; Bai, X.; Li, Y.; Xin, H. Model and solution of sustainable bi-level emergency commodity allocation based on type-2 fuzzy theory. Socio-Econ. Plan. Sci. 2023, 90, 101749. [Google Scholar] [CrossRef]
- Sun, C.; Mei, K.; Ma, L.; Ding, S.; Li, Y.; Ding, C. Adaptive type-2 fuzzy HOSM control design with asymmetric output constraints. Nonlinear Dyn. 2025, 113, 27895–27911. [Google Scholar] [CrossRef]
- Hao, Y.; Li, S.; Wang, M. Type-2 T-S Fuzzy Control for nonlinear systems with Niche Equality Index function. Int. J. Fuzzy Syst. 2021, 23, 1281–1293. [Google Scholar] [CrossRef]
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P.V. Nonlinear and Adaptive Control Design; John Wiley and Sons: New York, NY, USA, 1995. [Google Scholar]
- Pang, H.; Zhang, X.; Chen, J.; Liu, K. Design of a coordinated adaptive backstepping tracking control for nonlinear uncertain active suspension system. Appl. Math. Model. 2019, 76, 479–494. [Google Scholar] [CrossRef]
- Cheng, C. Research on Backstepping Control Method for Fractional Order Nonlinear Systems. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2024. [Google Scholar]
- Liu, W.; Cheng, X.; Zhang, J. Command filter-based adaptive fuzzy integral backstepping control for quadrotor UAV with input saturation. J. Frankl. Inst. 2023, 360, 484–507. [Google Scholar] [CrossRef]
- Zhao, L.; Li, Z.; Li, H.; Liu, B. Backstepping integral sliding mode control for pneumatic manipulators via adaptive extended state observers. ISA Trans. 2023, 144, 374–384. [Google Scholar] [CrossRef] [PubMed]
- Pan, H.; Zhang, H.; Gao, P. A fast fixed-time backstepping control method for systems with mismatched disturbances. Adv. Mech. Eng. 2024, 16, 16878132241289050. [Google Scholar] [CrossRef]
- Hao, Y.; Wang, M.; Tang, J.; Zhang, Z.; Xiong, J. Type-2 backstepping T-S fuzzy bionic control based on niche symmetry function. Symmetry 2025, 17, 121. [Google Scholar] [CrossRef]
- Boukhalfa, A.; Khettab, K.; Essounbouli, N. Novel hybrid interval type-2 fuzzy adaptive backstepping control for a class of uncertain discrete-time nonlinear systems. J. Eur. Des Systèmes Autom. 2021, 54, 733–741. [Google Scholar] [CrossRef]
- Rouabhi, R.; Zemmit, A.; Herizi, A.; Moussa, O.; Djeriou, S. Hybrid type-2 fuzzy backstepping control of doubly fed induction generator for wind energy conversion systems. J. Braz. Soc. Mech. Sci. Eng. 2024, 47, 24. [Google Scholar] [CrossRef]
- Choueikh, S.; Kermani, M.; M’Sahli, F. Adaptive fuzzy backstepping and backstepping sliding mode controllers based on ICD observer: A comparative study. Int. J. Uncertain. 2024, 32, 133–163. [Google Scholar]
- Abderrahim, Z.; Eddine, H.K.; Sabir, M. A New Improved Variable Step Size MPPT Method for Photovoltaic Systems Using Grey Wolf and Whale Optimization Technique Based PID Controller. J. Eur. Des Systèmes Autom. 2021, 54, 175–185. [Google Scholar] [CrossRef]
- Zemmit, A.; Messalti, S.; Herizi, A. New Direct Torque Control of Dual Star Induction Motor using Grey Wolf Optimization Technique. Prz. Elektrotechniczny 2024, 2024, 109. [Google Scholar] [CrossRef]
- Zemmit, A.; Loukriz, A.; Belhouchet, K.; Alharthi, Y.Z.; Alshareef, M.; Paramasivam, P.; Ghoneim, S.S.M. GWO and WOA variable step MPPT algorithms-based PV system output power optimization. Sci. Rep. 2025, 15, 7810. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Lin, Y.; Wan, S.-P. New efficient algorithms for the centroid of an interval type-2 fuzzy set. Inf. Sci. 2021, 507, 468–486. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Li, L. Adaptive Backstepping Fuzzy Control Based on Type-2 Fuzzy System. J. Appl. Math. 2012, 2012, 658424. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).