

A DEM-Based Modeling Method and Simulation Parameter Selection for Cyperus esculentus Seeds



Abstract
:1. Introduction
2. Measurement and Analysis of the Physical Properties of Cyperus esculentus
3. Measurement and Analysis of the Mechanical Properties of Cyperus esculentus
4. Modeling Method of Cyperus esculentus Seeds
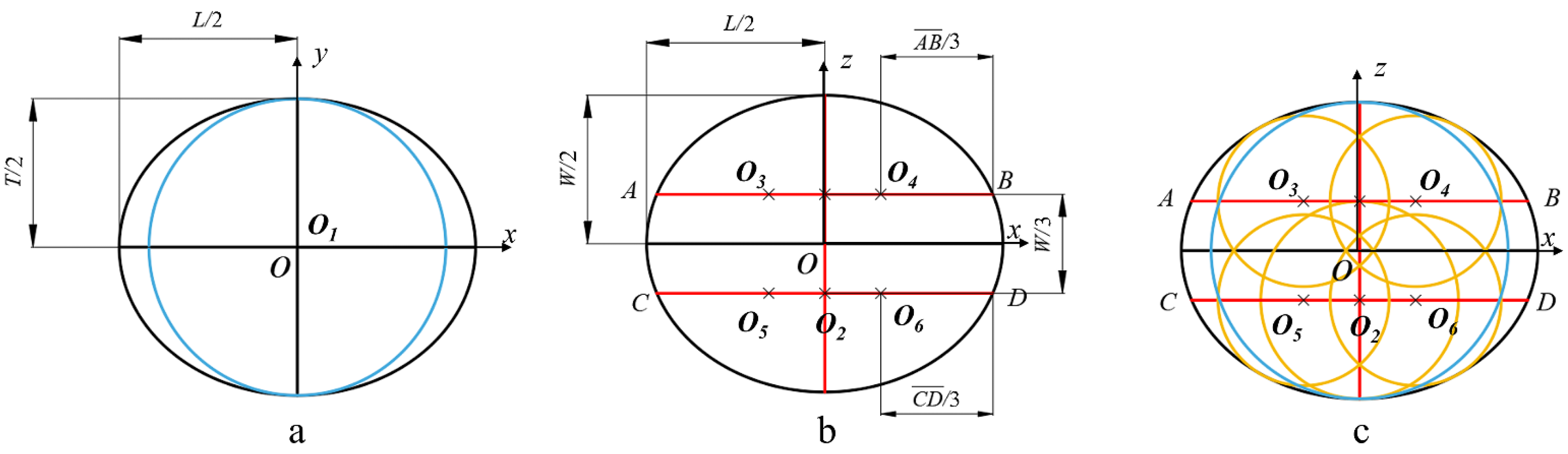
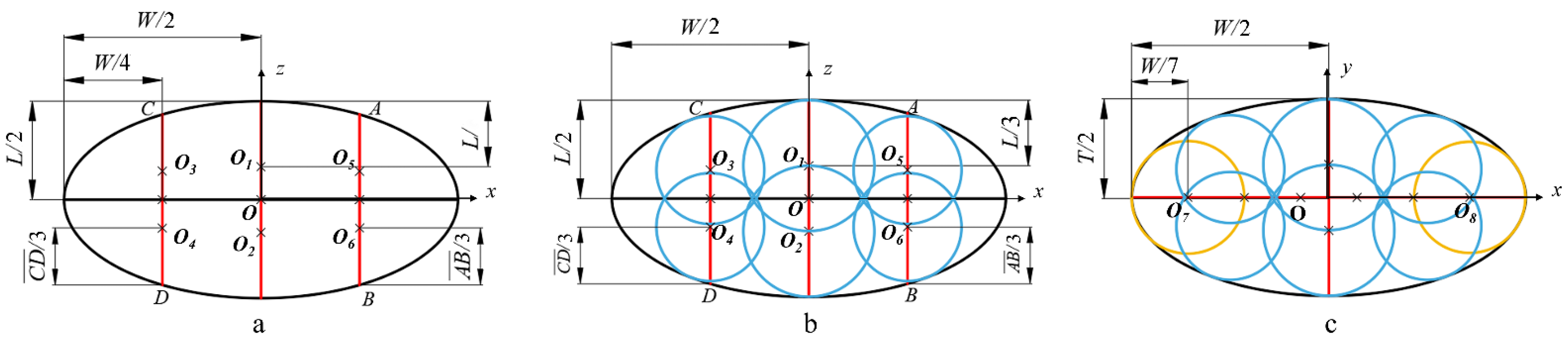
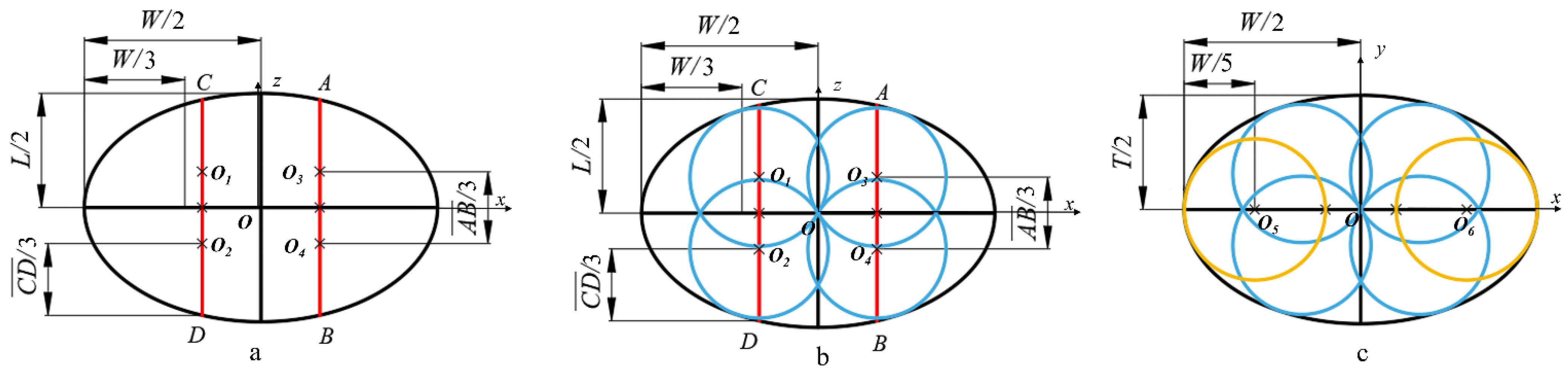
4.1. Particle Modeling
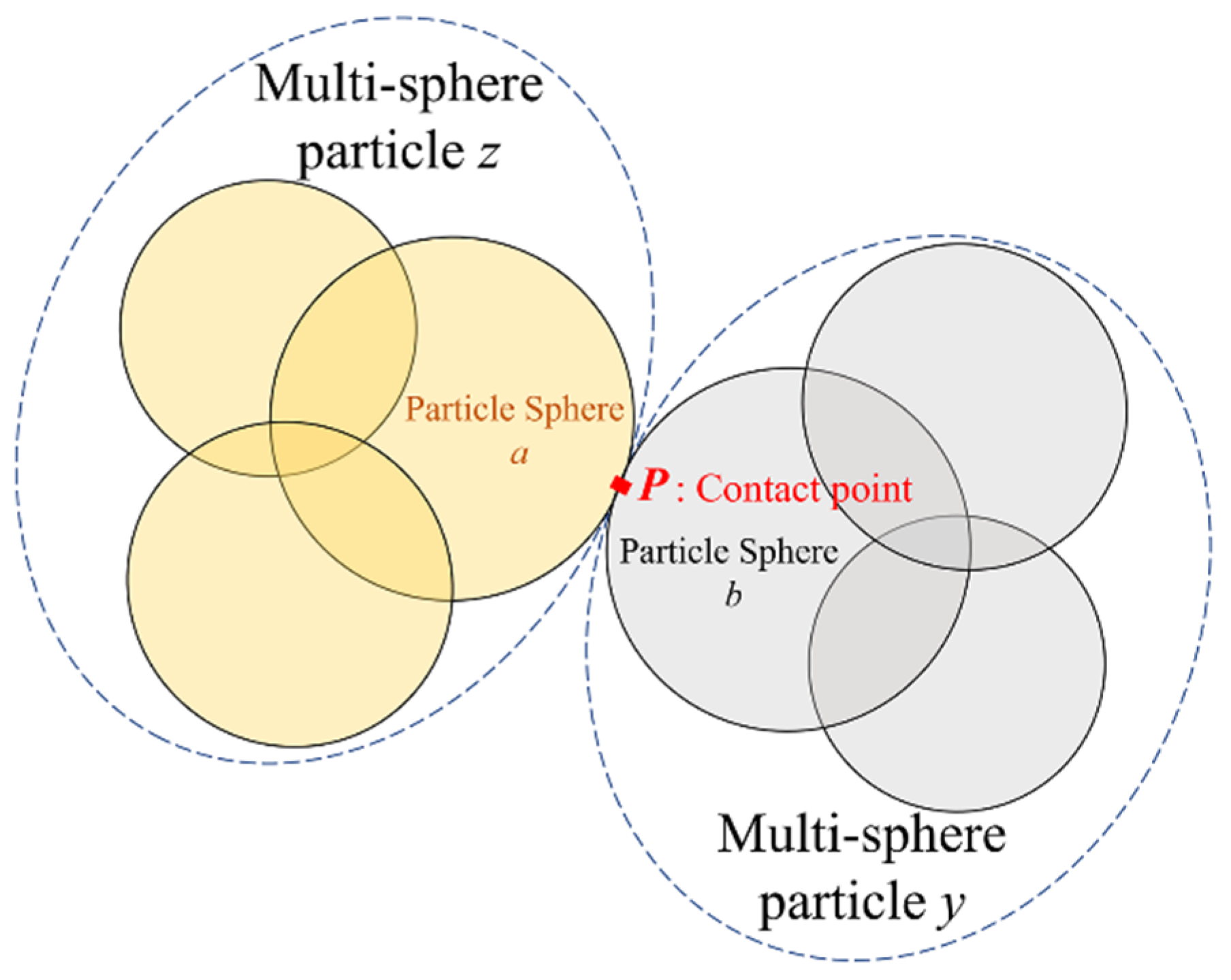
4.2. Contact Force Model of Multi-Sphere Particles
5. Determination of Simulation Parameters
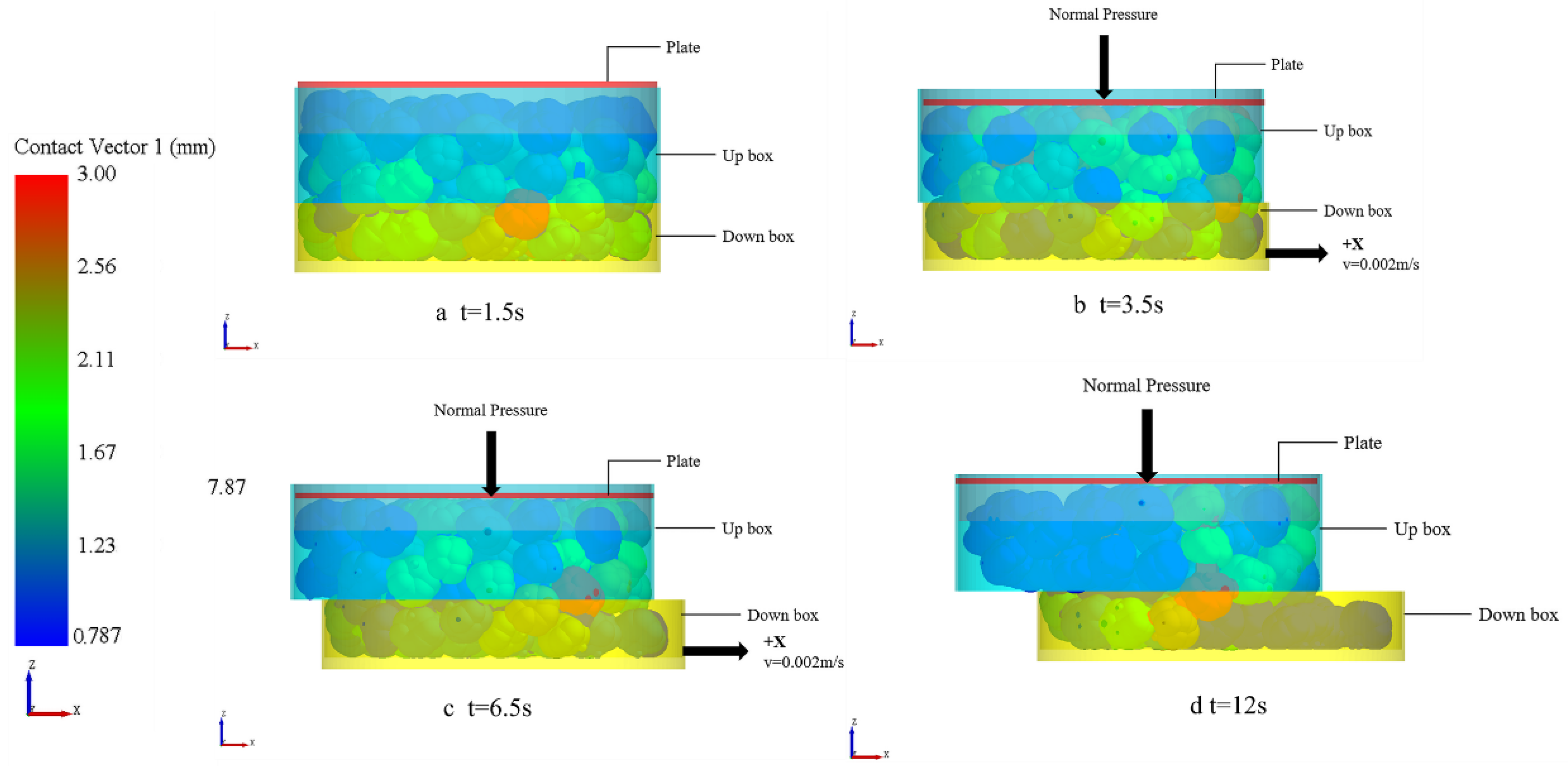
5.1. The Direct Shear Test
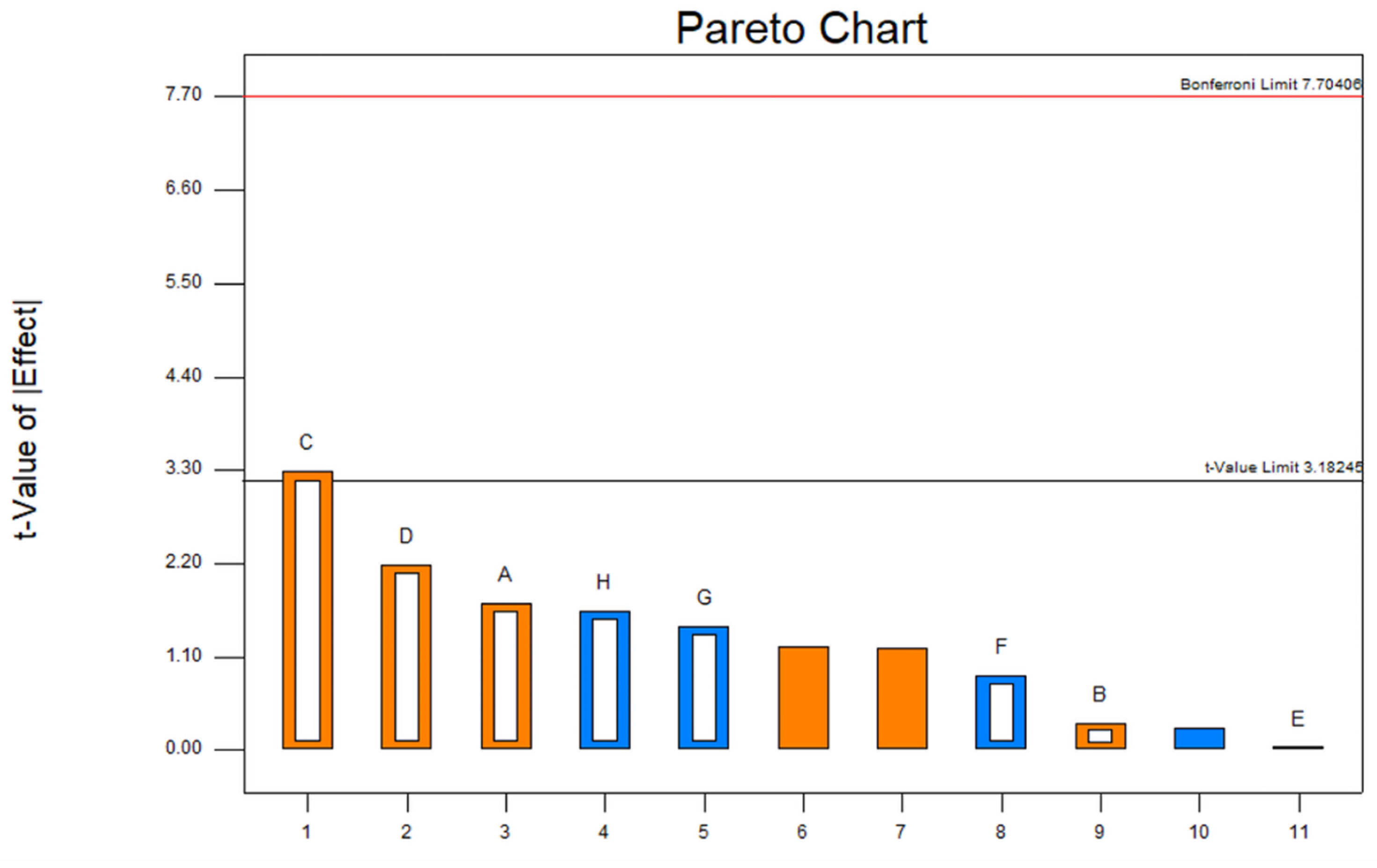
5.2. Plackett–Burman Test and Path of Steepest Ascent Method
6. Analysis and Validation
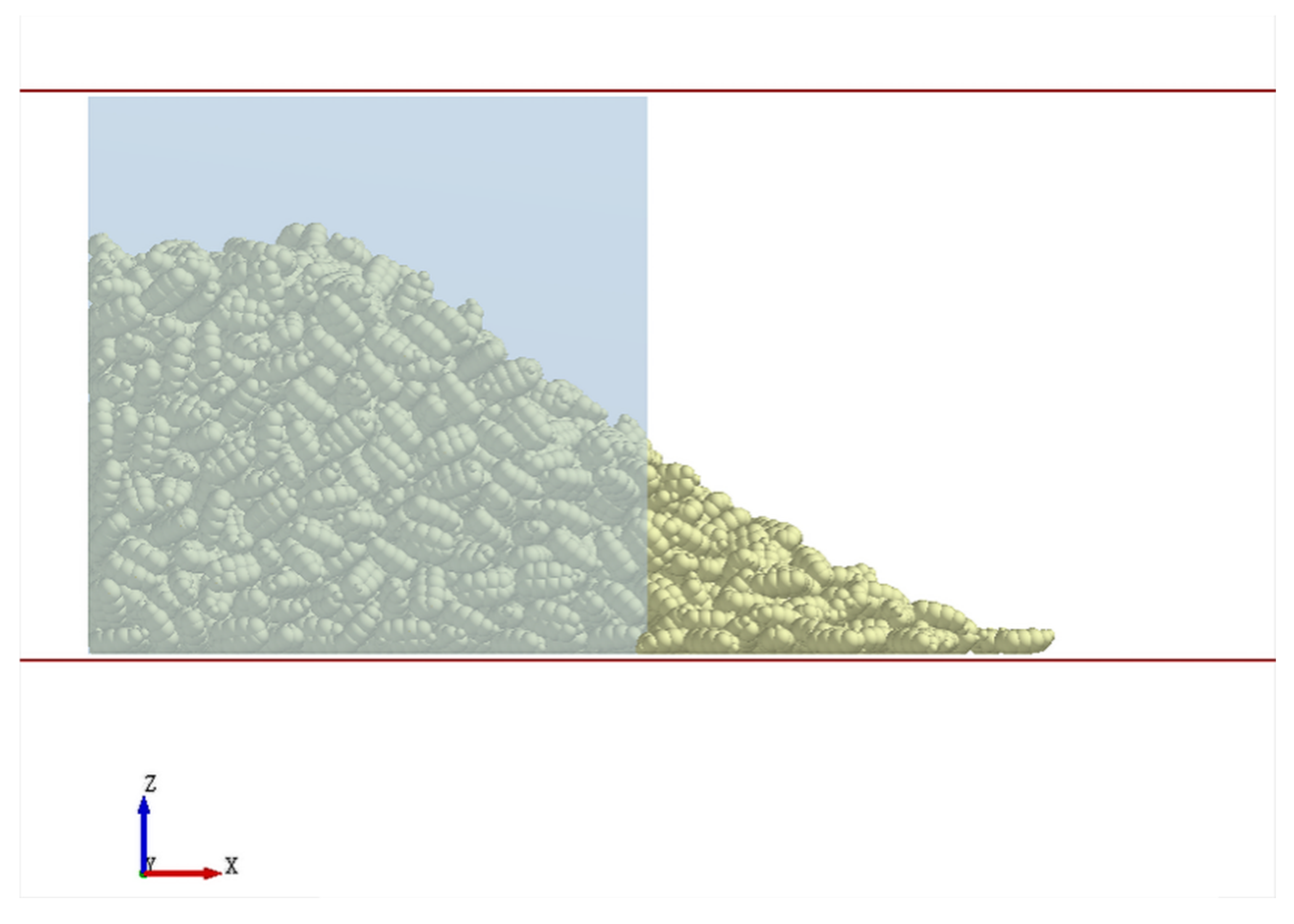
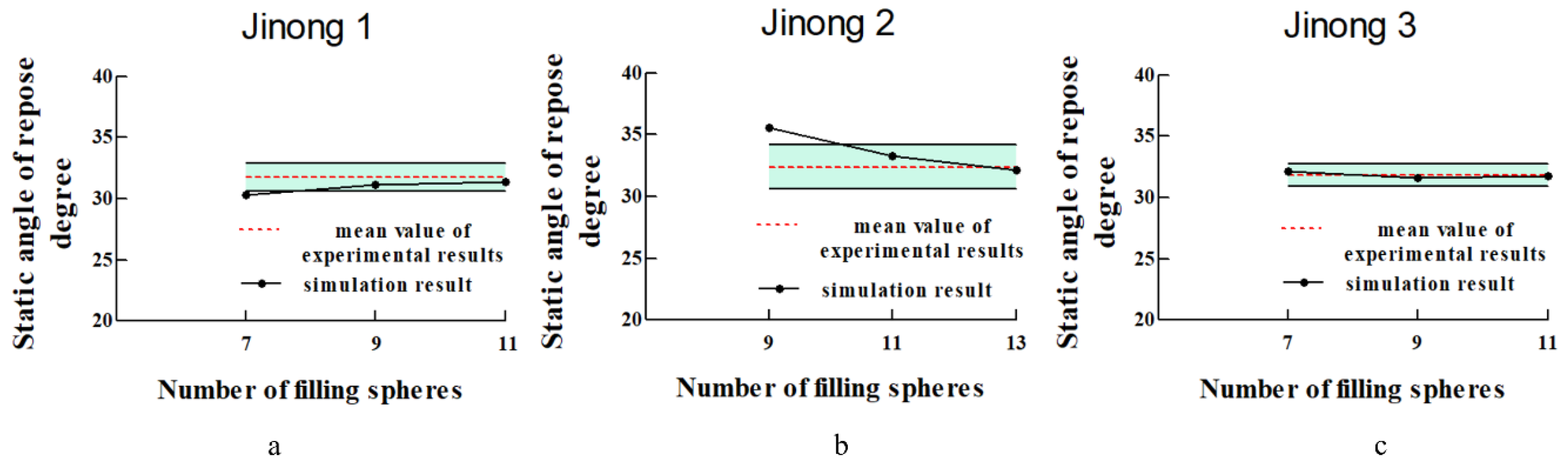
6.1. Piling Tests
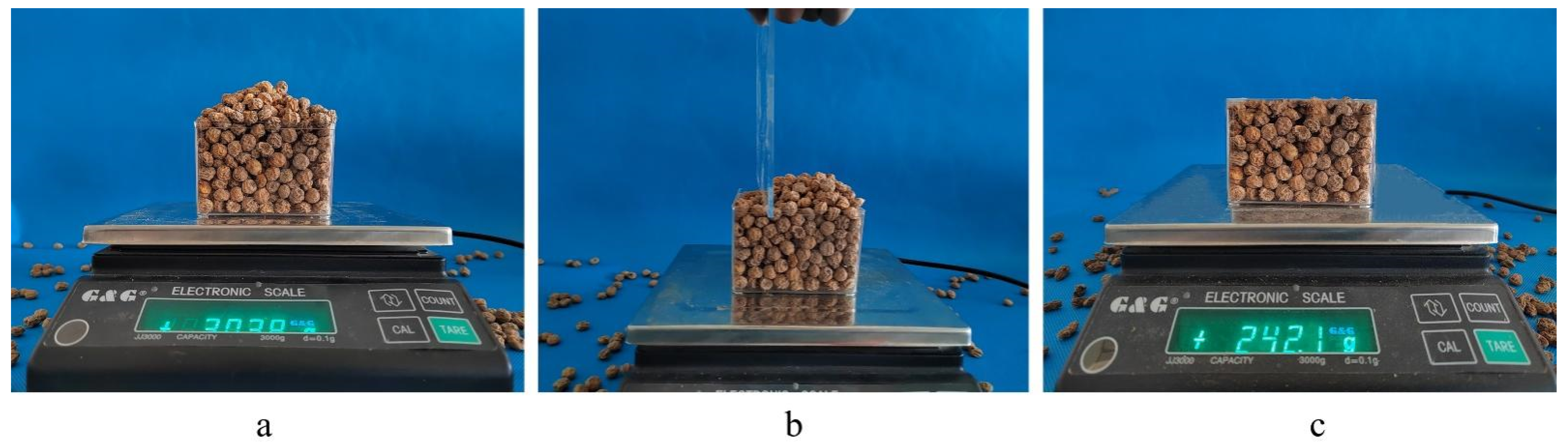
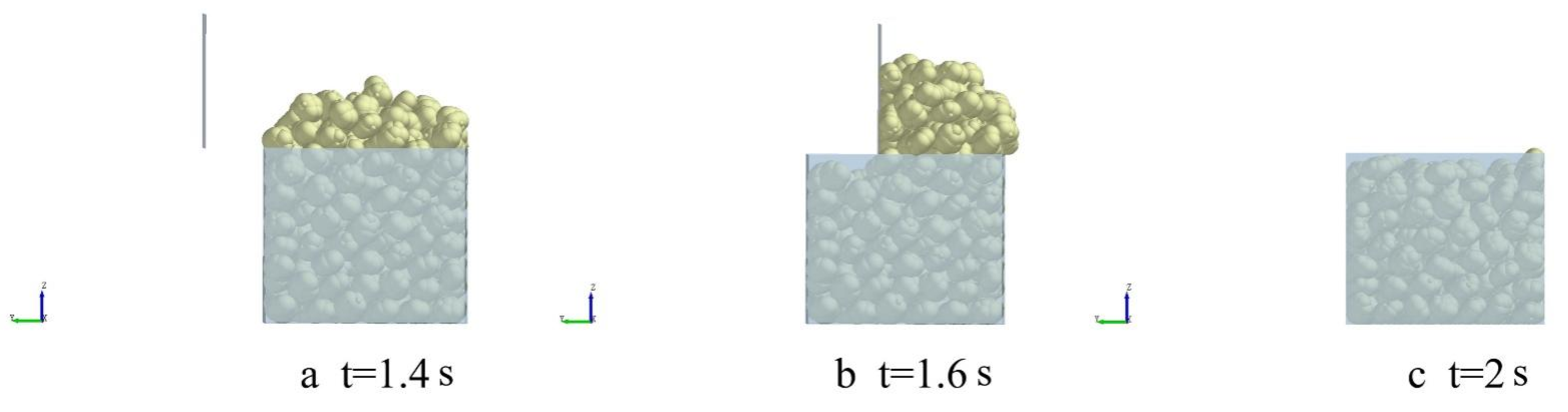
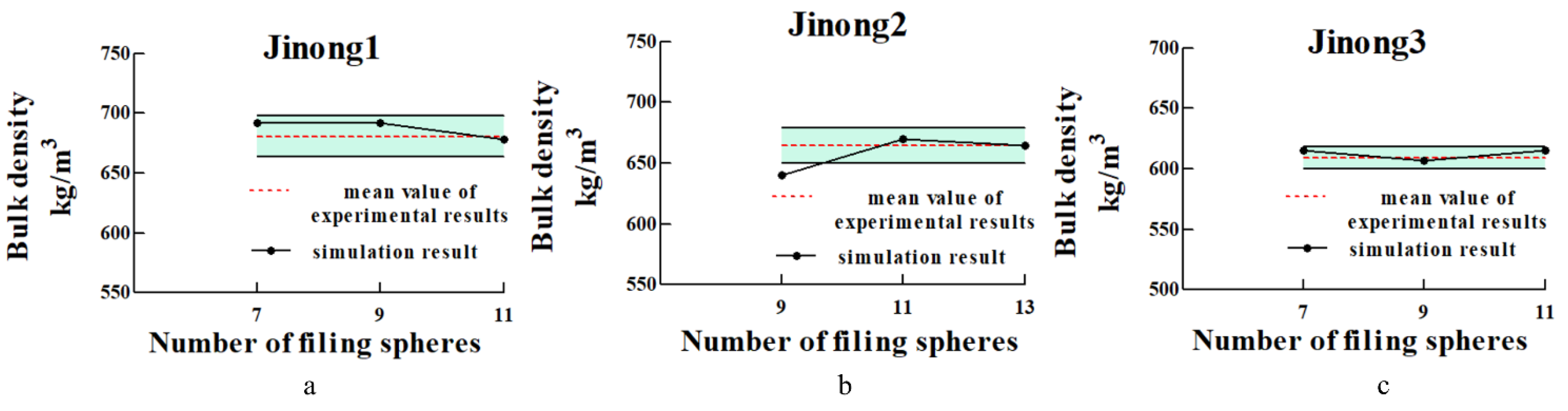
6.2. Bulk Density Tests
6.3. Simulation Analysis
7. Conclusions
- (1)
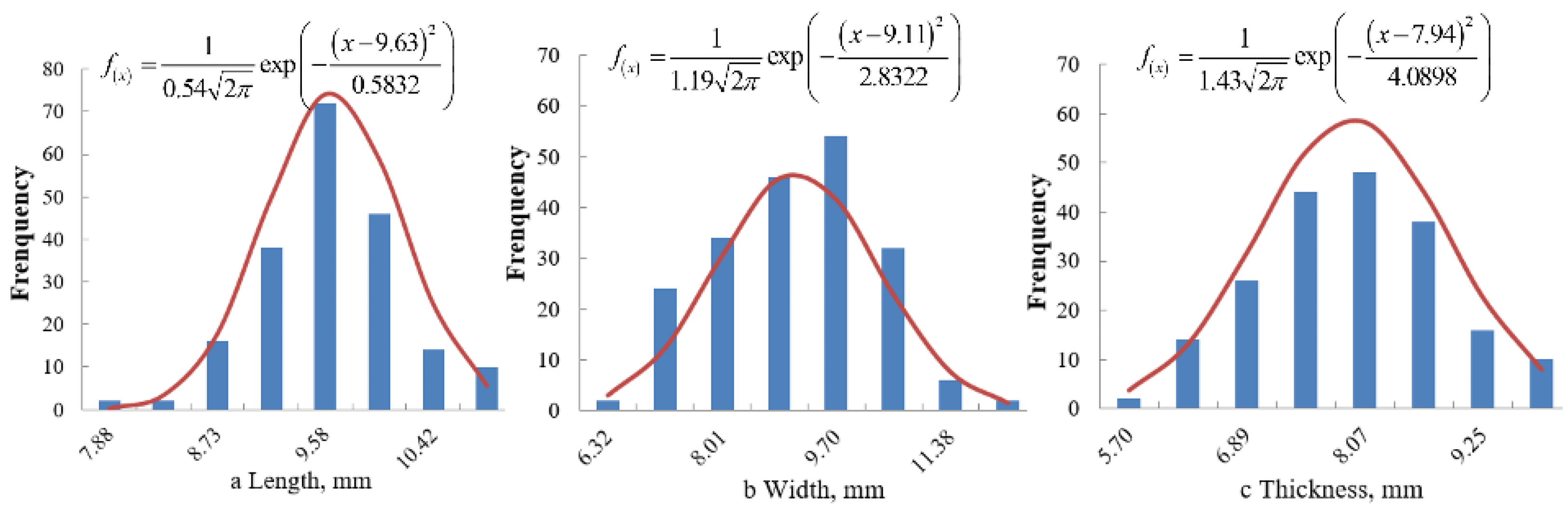
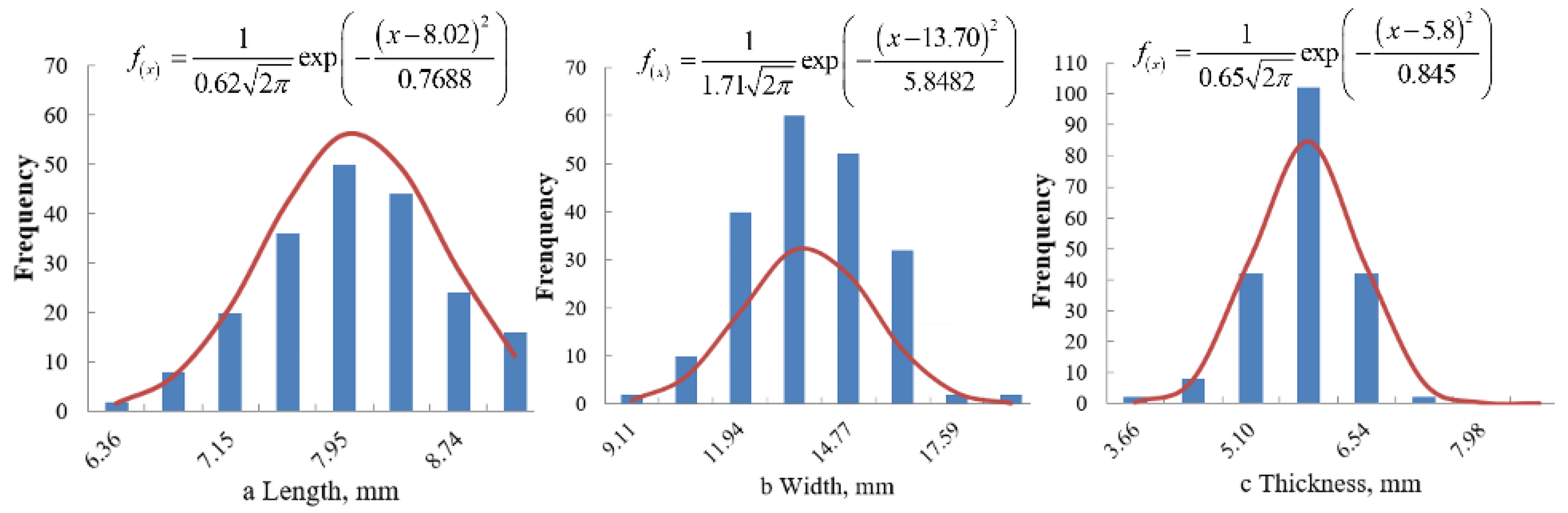
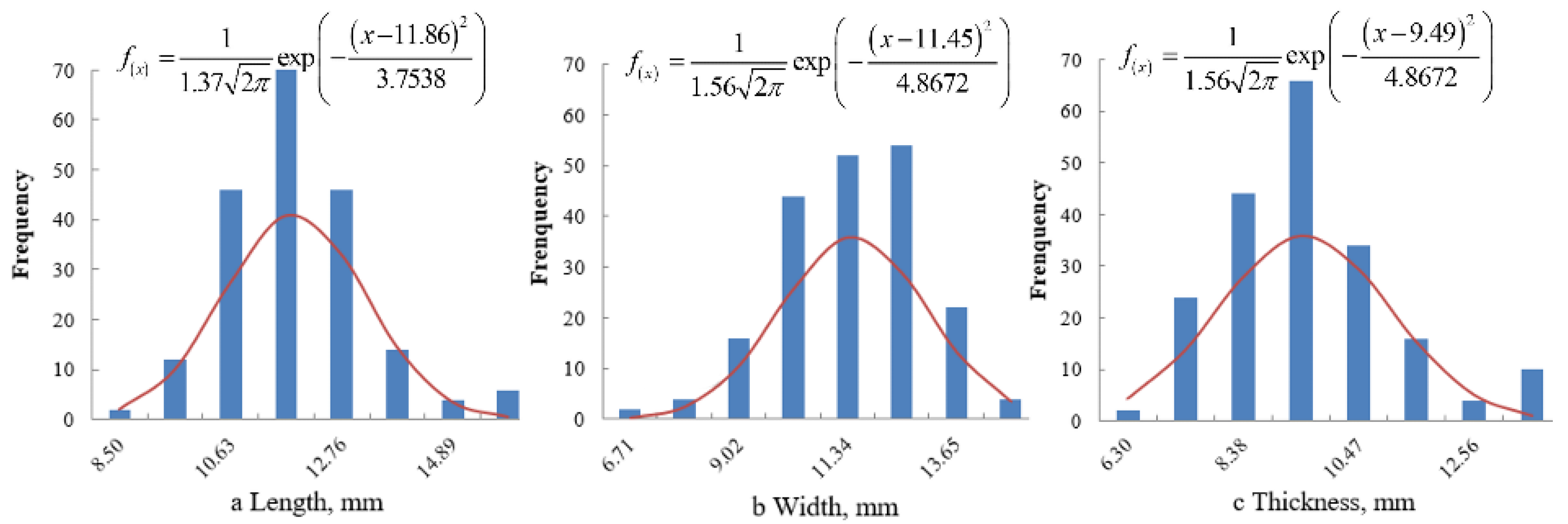
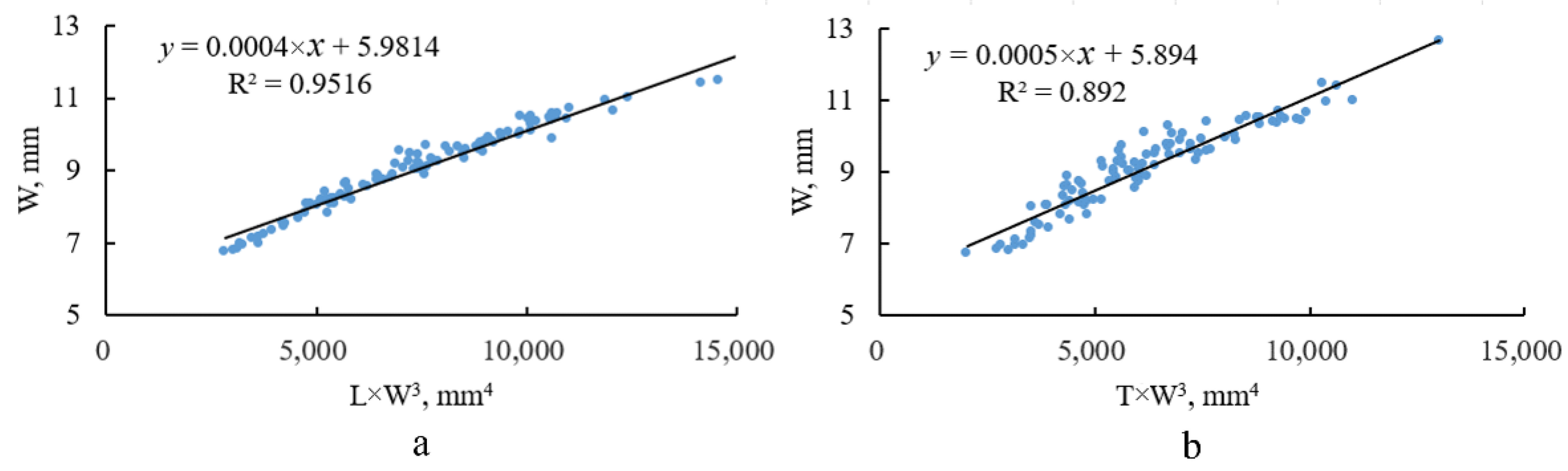
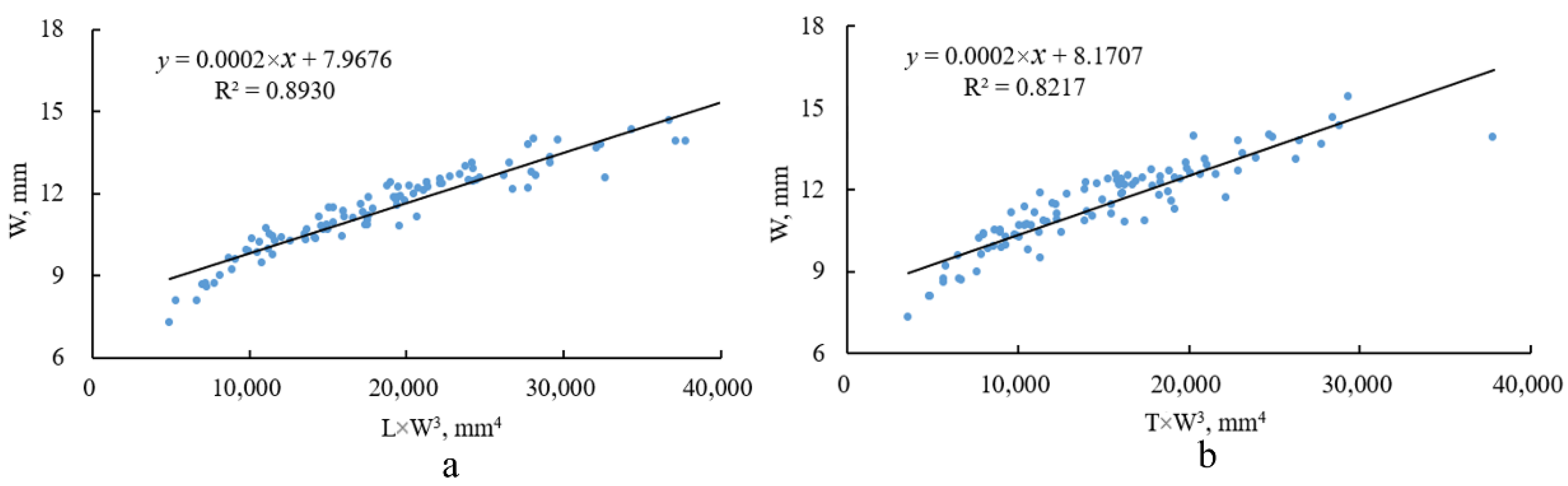
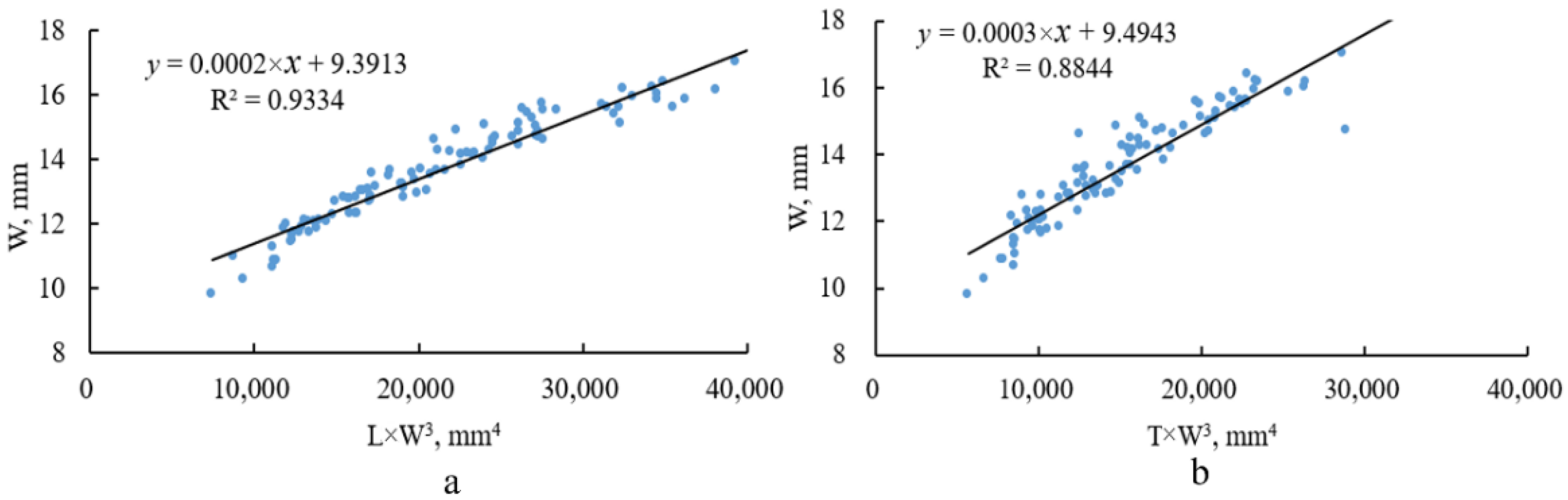
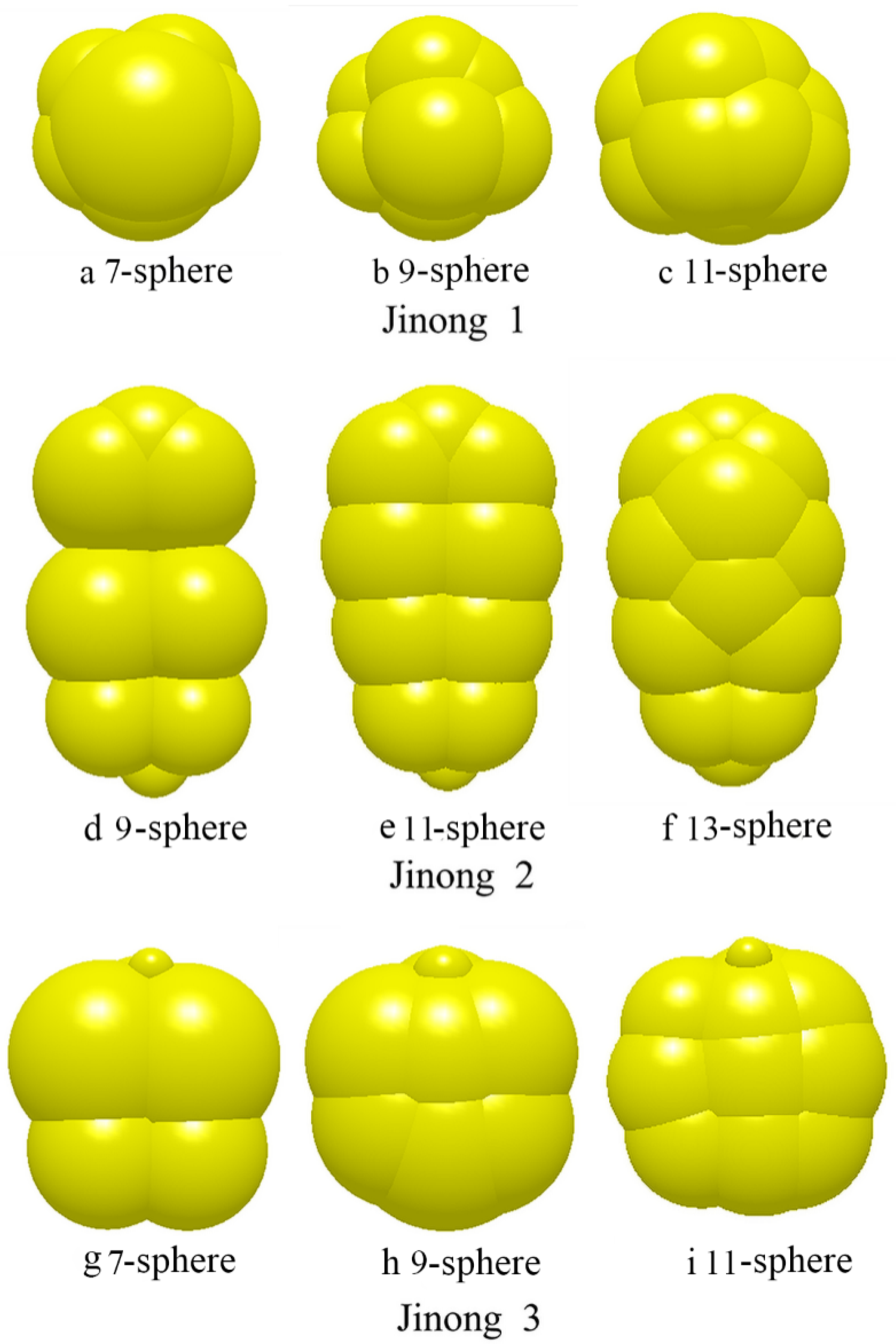
- The sizes of the Cyperus esculentus seed particles all had a normal distribution, and a certain functional relationship was identified between the primary dimension and other secondary dimensions. The width of the seed was the primary dimension, and the other secondary dimensions (length and thickness) were calculated based on their relationships with the primary dimension. On this basis, an approach for modeling Cyperus esculentus seed particles based on the MS method was proposed. The 7-sphere, 9-sphere, and 11-sphere models were constructed for the seeds of Jinong 1 and Jinong 3, and the 9-sphere, 11-sphere, and 13-sphere models were constructed for the seeds of Jinong 2;
- (2)
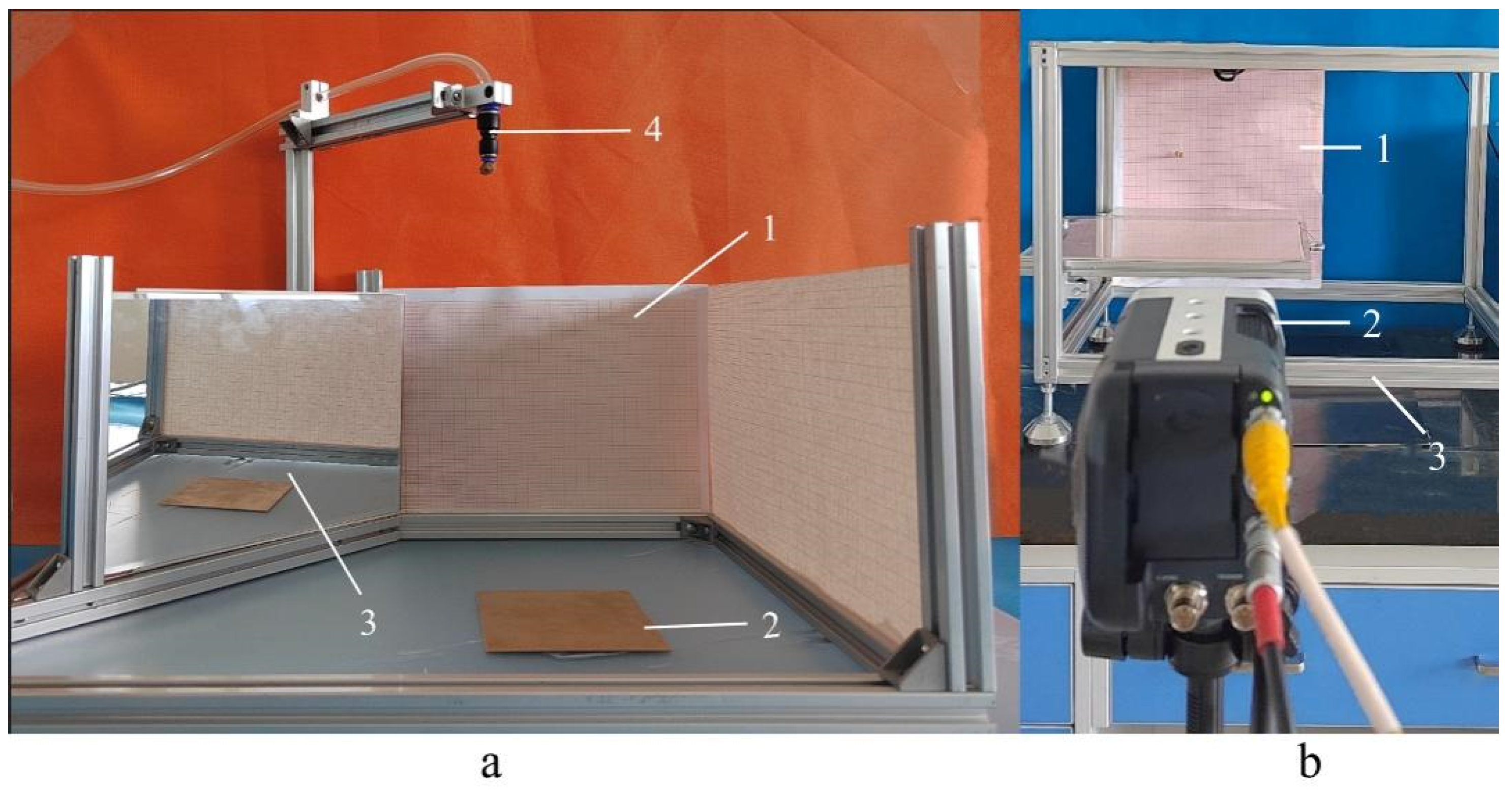
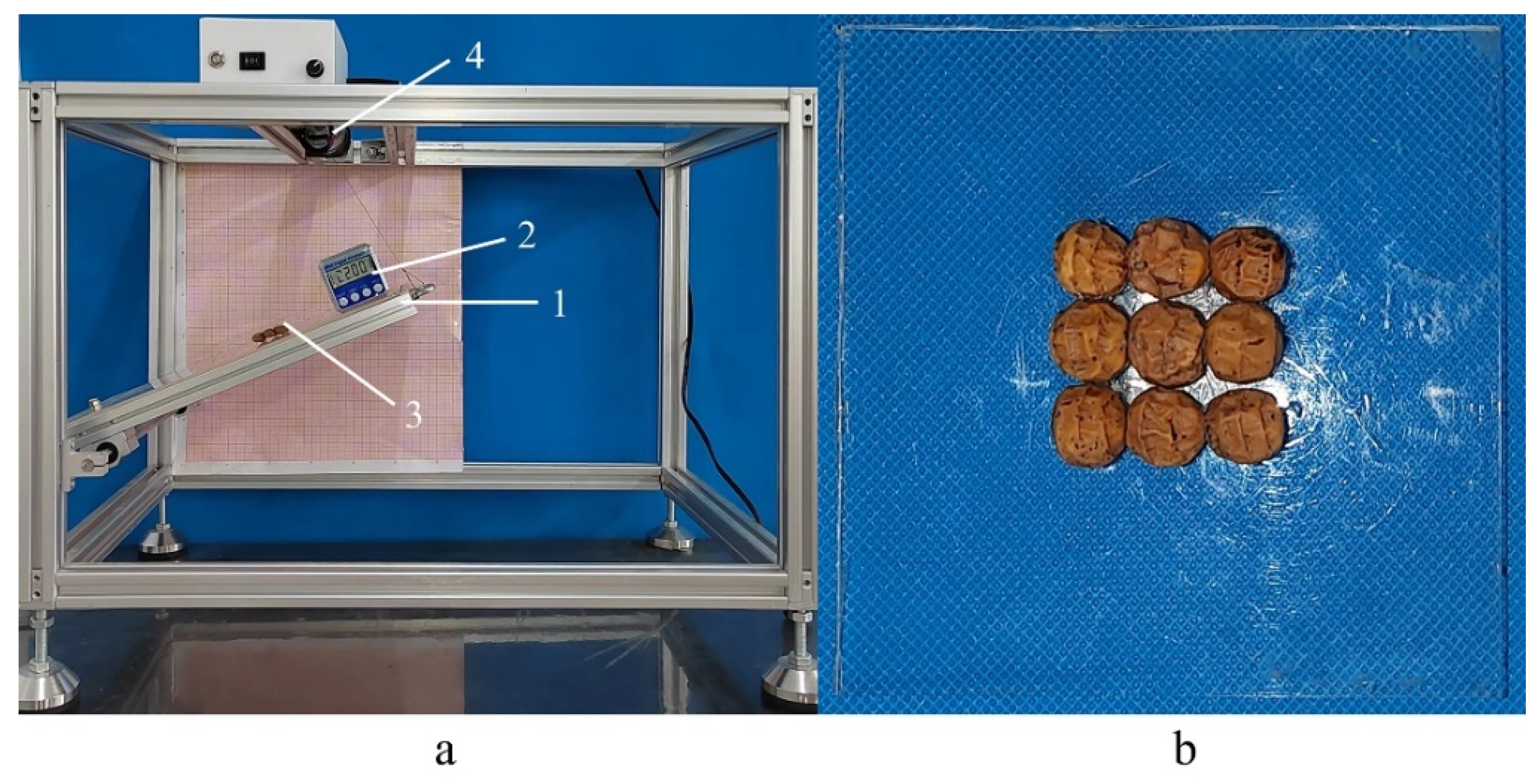
- The mechanical properties of the Cyperus esculentus seeds were tested and analyzed. The elastic modulus of the seed, the restitution coefficient between seed–seed, the restitution coefficient between the seed and the contact material, and the static friction coefficient were all obtained through experiments. Thus, the value range of the simulation parameters was determined, and then, significance analysis of the simulation parameters was carried out by using the PB test design method through the direct shear test in the simulation. It was found that the static friction coefficient between seed–seed had the most significant effect on the results. On this basis, the value of the simulation parameters was further confirmed through the path of steepest ascent method;
- (3)
- The piling tests and the bulk density test were both adopted for further modeling verification. With the increase in the number of filing spheres, the simulated results were consistent with those obtained experimentally in the piling test and the bulk density test. Except for the 7-sphere of Jinong 1 and 9-sphere of Jinong 2 in the piling test, and the 9-sphere of Jinong 2 in the bulk density test, the mean value of the simulated results fluctuated within the standard deviation of the experimental results. The mean values of the simulated results were all within the margin of the standard errors of the experimental results. Thus, the feasibility and rationality of the Cyperus esculentus seed models established and the parameters’ selection in this paper were further verified;
- (4)
- Future research will be conducted as follows: The established seed model and the simulation parameters selected will be applied to the analysis of the working process of the seed metering device and the cleaning apparatus of the Cyperus esculentus seeds in simulations. In addition, other types of irregular seed modeling will be studied to enrich the theory of irregular seed modeling.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| DEM | Discrete element method |
| MS | Multisphere method |
| PB | Plackett–Burman |
| ANOVA | Analysis of Variance |
| L | Length, mm |
| W | Width, mm |
| T | Thickness, mm |
| E* | Young’s modulus, MPa |
| F | Normal force to the seed, N |
| µ | Poisson’s ratio, dimensionless |
| D | Deformation of the seed, mm |
| R | Minimum curvature radii of the seeds with the compression probe and undersurface, mm |
| R′ | Maximum curvature radii of the seeds with the compression probe and undersurface, mm |
| KU | Constant |
| H′ | Thickness of the seed when compressed, mm |
| L′ | Length of the seed when compressed, mm |
| G* | Shear modulus, MPa |
| e* | Coefficient of restitution, dimensionless |
| H | Rebound height of the seed, mm |
| H | Release height of the seed, mm |
| v0 | Release velocity of seed No. 1, m/s |
| v1 | Velocity of seed No. 2 after collision, m/s |
| v2 | Velocity of seed No. 1 after collision, m/s |
| h1 | Rebound height of seed No. 2 after collision, mm |
| h2 | Rebound height of seed No. 1 after collision, mm |
| G | Gravitational acceleration, m/s2 |
| m | Mass, g |
| θ | Angle between the inclined apparatus and horizontal plane, ° |
| μs | Coefficient of static friction, dimensionless |
| Ez, Ey | Young’s moduli of particle z and y, MPa |
| µz, µy | Poisson ratios of particle z and y, dimensionless |
| R* | Equivalent radius, mm |
| Rza, Ryb | Radii of elemental sphere a and b, mm |
| δzap | Normal overlap |
| m* | Equivalent mass, g |
| mza, myb | Masses of elemental sphere a and b, g |
| xza, xzap | Position vectors of the center of elemental sphere a and the contact point p |
| ξzap | Total tangential displacement of elemental sphere a, mm |
| vnzap, vtzap | Relative normal and tangential velocities of elemental sphere a at the contact point p, m/s |
| N, P | Numbers of elemental spheres and contact points |
| xz | Position vector of the center of particle z |
| μr | Coefficient of rolling friction, dimensionless |
| Unit angular velocity of particle z, rad/s | |
| V | Volume, m3 |
| Ix, Iy, Iz | Moment of inertia, kg·m2 |
| a | Half of the length of the seed, mm |
| b | Half of the thickness of the seed, mm |
| c | Half of the width of the seed, mm |
References
- Mullinan, G.A. The biology of Canadian weeds 17 Cyperus esculentus. Can. J. Plant Sci. 1976, 56, 339–350. [Google Scholar] [CrossRef]
- Rong, G.; Negi, S.; Jofriet, J. Simulation of Flow Behaviour of Bulk Solids in Bins. Part 2: Shear Bands, Flow Corrective Inserts and Velocity Profiles. J. Agric. Eng. Res. 1995, 62, 257–269. [Google Scholar] [CrossRef]
- Lu, Z.; Negi, S.; Jofriet, J. A Numerical Model for Flow of Granular Materials in Silos. Part 1: Model Development. J. Agric. Eng. Res. 1997, 68, 223–229. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D.L. A discrete numerical model for granular assemblies. Géotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Ouadfel, H.; Rothenburg, L. An algorithm for detecting inter-ellipsoid contacts—Science Direct. Comput. Geotech. 1999, 24, 245–263. [Google Scholar] [CrossRef]
- Lin, X.; Ng, T.-T. Contact detection algorithms for three-dimensional ellipsoids in discrete element modelling. Int. J. Numer. Anal. Methods Géoméch. 2010, 19, 653–659. [Google Scholar] [CrossRef]
- Cleary, P.W.; Stokes, N.; Hurley, J. Efficient Collision Detection for Three Dimensional Super-ellipsoidal Particles. Comput. Tech. Appl. Ctac. 1997, 1–7. Available online: https://www.researchgate.net/publication/246030866_Efficient_Collision_Detection_for_Three_Dimensional_Super-ellipsoidal_Particles (accessed on 24 July 2022).
- Cundall, P. Formulation of a three-dimensional distinct element model—Part I. A scheme to detect and represent contacts in a system composed of many polyhedral blocks. Int. J. Rock Mech. Min. Sci. Géoméch. Abstr. 1988, 25, 107–116. [Google Scholar] [CrossRef]
- Kruggel-Emden, H.; Rickelt, S.; Wirtz, S.; Scherer, V. A study on the validity of the multi-sphere Discrete Element Method. Powder Technol. 2008, 188, 153–165. [Google Scholar] [CrossRef]
- Fard, A.; Hossein, M. Discrete Element Modelling of the Dynamic Behaviour of Non-Spherical Particulate Materials. Ph.D. Thesis, Newcastle University, Newcastle, UK, 2000. [Google Scholar]
- Xu, T.; Yu, J.; Yu, Y.; Wang, Y. A modelling and verification approach for soybean seed particles using the discrete element method. Adv. Powder Technol. 2018, 29, 3274–3290. [Google Scholar] [CrossRef]
- Yan, D.; Yu, J.; Wang, Y.; Zhou, L.; Yu, Y. A general modelling method for soybean seeds based on the discrete element method. Powder Technol. 2020, 372, 212–226. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, J.; Xue, D.; Wang, Y.; Zhang, Q.; Ren, L. An approach to and validation of maize-seed-assembly modelling based on the discrete element method. Powder Technol. 2018, 328, 167–183. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, J.; Wang, Y.; Yan, D.; Yu, Y. A study on the modelling method of maize-seed particles based on the discrete element method. Powder Technol. 2020, 374, 353–376. [Google Scholar] [CrossRef]
- Coetzee, C. Review: Calibration of the discrete element method. Powder Technol. 2017, 310, 104–142. [Google Scholar] [CrossRef]
- Wang, L.; Li, R.; Wu, B.; Wu, Z.; Ding, Z. Determination of the coefficient of rolling friction of an irregularly shaped maize particle group using physical experiment and simulations. Particuology 2018, 38, 185–195. [Google Scholar] [CrossRef]
- Liu, F.; Li, D.; Zhang, T.; Lin, Z. Analysis and calibration of quinoa grain parameters used in a discrete element method based on the repose angle of the particle heap. INMATEH Agric. Eng. 2020, 61, 77–86. [Google Scholar] [CrossRef]
- Hearn, E.J. Mechanics of materials: An introduction to the mechanics of elastic and plastic deformation of solids and structural components. Beyond Fail. 1997, 49, 211–291. [Google Scholar]
- ASAE S368. 4 DEC2000 (R2017); Compression Test of Food Materials of Convex Shape. ASAE: St. Joseph, MI, USA, 2000.
- Smock, D.D.; Parry, L.R. Drop Test Device. U.S. Patent 5390535A, 21 February 1995. Available online: https://patents.justia.com/patent/5390535 (accessed on 24 July 2022).
- Wong, C.; Daniel, M.; Rongong, J. Energy dissipation prediction of particle dampers. J. Sound Vib. 2009, 319, 91–118. [Google Scholar] [CrossRef]
- González-Montellano, C.; Fuentes, J.; Ayuga-Téllez, E.; Ayuga, F. Determination of the mechanical properties of maize grains and olives required for use in DEM simulations. J. Food Eng. 2012, 111, 553–562. [Google Scholar] [CrossRef]
- Bravo, E.L.; Tijskens, E.; Suárez, M.H.; Cueto, O.G.; Ramon, H. Prediction model for non-inversion soil tillage imple-mented on discrete element method. Comput. Electron. Agriculture 2014, 106, 120–127. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Q.; Huang, Y.; Ji, J. An efficient method for determining DEM parameters of a loose cohesive soil modelled using hysteretic spring and linear cohesion contact models. Biosyst. Eng. 2022, 215, 283–294. [Google Scholar] [CrossRef]
- Drobny, J.G. Handbook of Thermoplastic Elastomers; Andrew, W., Ed.; Elsevier: Norwich, UK; New York, NY, USA, 2007; pp. 391–404. ISBN 9780323221368. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variety | Density | Moisture Content | Thousand Seed Weight |
|---|---|---|---|
| Jinong 1 | 1.34 g/cm3 | 28.8% | 427 g |
| Jinong 2 | 1.27 g/cm3 | 28.4% | 406 g |
| Jinong 3 | 1.19 g/cm3 | 35.8% | 809 g |
| Variety | Size | Mean/mm | Standard Deviation/mm |
|---|---|---|---|
| Jinong 1 | Length (L) | 9.63 | 0.54 |
| Width (W) | 9.11 | 1.19 | |
| Thickness (T) | 7.94 | 1.43 | |
| Jinong 2 | Length (L) | 8.02 | 0.62 |
| Width (W) | 13.70 | 1.71 | |
| Thickness (T) | 5.80 | 0.65 | |
| Jinong 3 | Length (L) | 11.86 | 1.37 |
| Width (W) | 11.45 | 1.56 | |
| Thickness (T) | 9.49 | 1.56 |
| Variety | Expression | R2 |
|---|---|---|
| Jinong 1 | L = (W − 5.9814)/(0.0004 × W3) | 0.9516 |
| T = (W − 5.984)/(0.0005 × W3) | 0.892 | |
| Jinong 2 | L = (W − 9.3913)/(0.0002 × W3) | 0.9334 |
| T = (W − 9.4943)/(0.0003 × W3) | 0.8844 | |
| Jinong 3 | L = (W − 7.9676)/(0.0002 × W3) | 0.893 |
| T = (W − 8.1707)/(0.0002 × W3) | 0.8217 |
| Variety | Collision Material | Restitution Coefficient |
|---|---|---|
| Jinong 1 | Copper | 0.58 |
| Steel | 0.65 | |
| Polymethyl methacrylate | 0.41 | |
| Seed | 0.28 | |
| Jinong 2 | Copper | 0.64 |
| Steel | 0.75 | |
| Polymethyl methacrylate | 0.42 | |
| Seed | 0.34 | |
| Jinong 3 | Copper | 0.68 |
| Steel | 0.79 | |
| Polymethyl methacrylate | 0.55 | |
| Seed | 0.50 |
| Material | Jinong 1 | Jinong 2 | Jinong 3 |
|---|---|---|---|
| Copper | 0.41 | 0.39 | 0.38 |
| Steel | 0.40 | 0.39 | 0.35 |
| Polymethyl methacrylate | 0.42 | 0.40 | 0.34 |
| Variety | Maximum Shear Strength /kPa | Internal Friction Angle /° | Cohesive Force /kPa |
|---|---|---|---|
| Jinong 1 | 118.23 | 27.03 | 14.11 |
| Jinong 2 | 136.67 | 31.43 | 6.88 |
| Jinong 3 | 105.76 | 25.83 | 14.49 |
| Symbol | Factor | Low Level (−1) | High Level (+1) |
|---|---|---|---|
| A | Poisson’s ratio of seed | 0.3 | 0.5 |
| B | Shear modulus of seed/MPa | 30 | 300 |
| C | Coefficient of static friction of seed–seed | 0.15 | 0.55 |
| D | Coefficient of static friction of seed–polymethyl methacrylate | 0.2 | 0.6 |
| E | Coefficient of rolling friction of seed–seed | 0 | 0.1 |
| F | Coefficient of rolling friction of seed–polymethyl methacrylate | 0 | 0.1 |
| G | Restitution coefficient of seed–seed | 0.15 | 0.75 |
| H | Restitution coefficient of seed–polymethyl methacrylate | 0.2 | 0.8 |
| I1, I2, I3 | Virtual parameters | — | — |
| Factor | A | B | C | D | E | F | G | H | I1 | I2 | I3 | Y Maximum Shear Strength (kPa) | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| No. | |||||||||||||
| 1 | 0.5 | 300 | 0.15 | 0.6 | 0.1 | 0.1 | 0.15 | 0.2 | −1 | 1 | −1 | 97.9953 | |
| 2 | 0.3 | 300 | 0.55 | 0.6 | 0 | 0 | 0.15 | 0.8 | −1 | 1 | 1 | 127.114 | |
| 3 | 0.3 | 30 | 0.15 | 0.2 | 0 | 0 | 0.15 | 0.2 | −1 | −1 | −1 | 51.6994 | |
| 4 | 0.3 | 300 | 0.55 | 0.2 | 0.1 | 0.1 | 0.75 | 0.2 | −1 | −1 | 1 | 88.6227 | |
| 5 | 0.5 | 30 | 0.55 | 0.6 | 0 | 0.1 | 0.75 | 0.8 | −1 | −1 | −1 | 99.1627 | |
| 6 | 0.3 | 30 | 0.55 | 0.2 | 0.1 | 0.1 | 0.15 | 0.8 | 1 | 1 | −1 | 77.4156 | |
| 7 | 0.5 | 30 | 0.15 | 0.2 | 0.1 | 0 | 0.75 | 0.8 | −1 | 1 | 1 | 46.1292 | |
| 8 | 0.3 | 300 | 0.15 | 0.6 | 0.1 | 0 | 0.75 | 0.8 | 1 | −1 | −1 | 61.1053 | |
| 9 | 0.5 | 300 | 0.15 | 0.2 | 0 | 0.1 | 0.15 | 0.8 | 1 | −1 | 1 | 80.4509 | |
| 10 | 0.5 | 30 | 0.55 | 0.6 | 0.1 | 0 | 0.15 | 0.2 | 1 | −1 | 1 | 194.423 | |
| 11 | 0.5 | 300 | 0.55 | 0.2 | 0 | 0 | 0.75 | 0.2 | 1 | 1 | −1 | 122.911 | |
| 12 | 0.3 | 30 | 0.15 | 0.6 | 0 | 0.1 | 0.75 | 0.2 | 1 | 1 | 1 | 81.3848 | |
| Factor | Sum of Squares | F Value | p Value | Significance |
|---|---|---|---|---|
| A | 1969.42 | 3.01 | 0.1813 | 3 |
| B | 65.26 | 0.100 | 0.7729 | 7 |
| C | 7051.12 | 10.77 | 0.0464 | 1 |
| D | 3134.91 | 4.79 | 0.1165 | 2 |
| E | 0.73 | 1.121 × 10−3 | 0.9754 | 8 |
| F | 511.55 | 0.78 | 0.4419 | 6 |
| G | 1403.62 | 2.14 | 0.2394 | 5 |
| H | 1768.04 | 2.70 | 0.1989 | 4 |
| No. | Coefficient of Static Friction of Seed–Seed | Maximum Shear Strength /kPa | Relative Error |
|---|---|---|---|
| 1 | 0.15 | 50.73 | 57.09% |
| 2 | 0.25 | 62.54 | 47.10% |
| 3 | 0.35 | 95.80 | 18.98% |
| 4 | 0.45 | 108.67 | 8.09% |
| 5 | 0.55 | 122.88 | 3.93% |
| Parameter | Jinong 1 | Jinong 2 | Jinong 3 | Polymethyl Methacrylate |
|---|---|---|---|---|
| Poisson’s ratio | 0.4 | 0.4 | 0.4 | 0.32 |
| Density kg/m3 | 1340 | 1270 | 1190 | 1190 |
| Shear modulus MPa | 165 | 165 | 165 | 1197 |
| Coefficient of restitution | 0.45 | 0.45 | 0.45 | 0.55 |
| Coefficient of static friction | 0.55 | 0.35 | 0.35 | 0.34 |
| Coefficient of rolling friction | 0.05 | 0.05 | 0.05 | 0.05 |
| Variety | Volume *1/m3 V | Moment of inertia /kg·m2 | ||
|---|---|---|---|---|
| Ix *2 | Iy *3 | Iz *4 | ||
| Jinong 1 | 2.91722 × 10−6 | 1.37398 × 10−10 | 1.21829 × 10−10 | 1.14194 × 10−10 |
| Jinong 2 | 2.66842 × 10−6 | 1.70719 × 10−10 | 6.64186 × 10−11 | 1.49946 × 10−10 |
| Jinong 3 | 5.39506 × 10−6 | 3.49005 × 10−10 | 2.96202 × 10−10 | 2.83974 × 10−10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, T.; Zhang, R.; Zhu, F.; Feng, W.; Wang, Y.; Wang, J. A DEM-Based Modeling Method and Simulation Parameter Selection for Cyperus esculentus Seeds. Processes 2022, 10, 1729. https://doi.org/10.3390/pr10091729
Xu T, Zhang R, Zhu F, Feng W, Wang Y, Wang J. A DEM-Based Modeling Method and Simulation Parameter Selection for Cyperus esculentus Seeds. Processes. 2022; 10(9):1729. https://doi.org/10.3390/pr10091729
Chicago/Turabian StyleXu, Tianyue, Ruxin Zhang, Fengwu Zhu, Weizhi Feng, Yang Wang, and Jingli Wang. 2022. "A DEM-Based Modeling Method and Simulation Parameter Selection for Cyperus esculentus Seeds" Processes 10, no. 9: 1729. https://doi.org/10.3390/pr10091729
APA StyleXu, T., Zhang, R., Zhu, F., Feng, W., Wang, Y., & Wang, J. (2022). A DEM-Based Modeling Method and Simulation Parameter Selection for Cyperus esculentus Seeds. Processes, 10(9), 1729. https://doi.org/10.3390/pr10091729