
Predicting the Traffic Capacity of an Intersection Using Fuzzy Logic and Computer Vision

 ,
, 
Abstract
:1. Introduction
Related Works
2. Materials and Methods
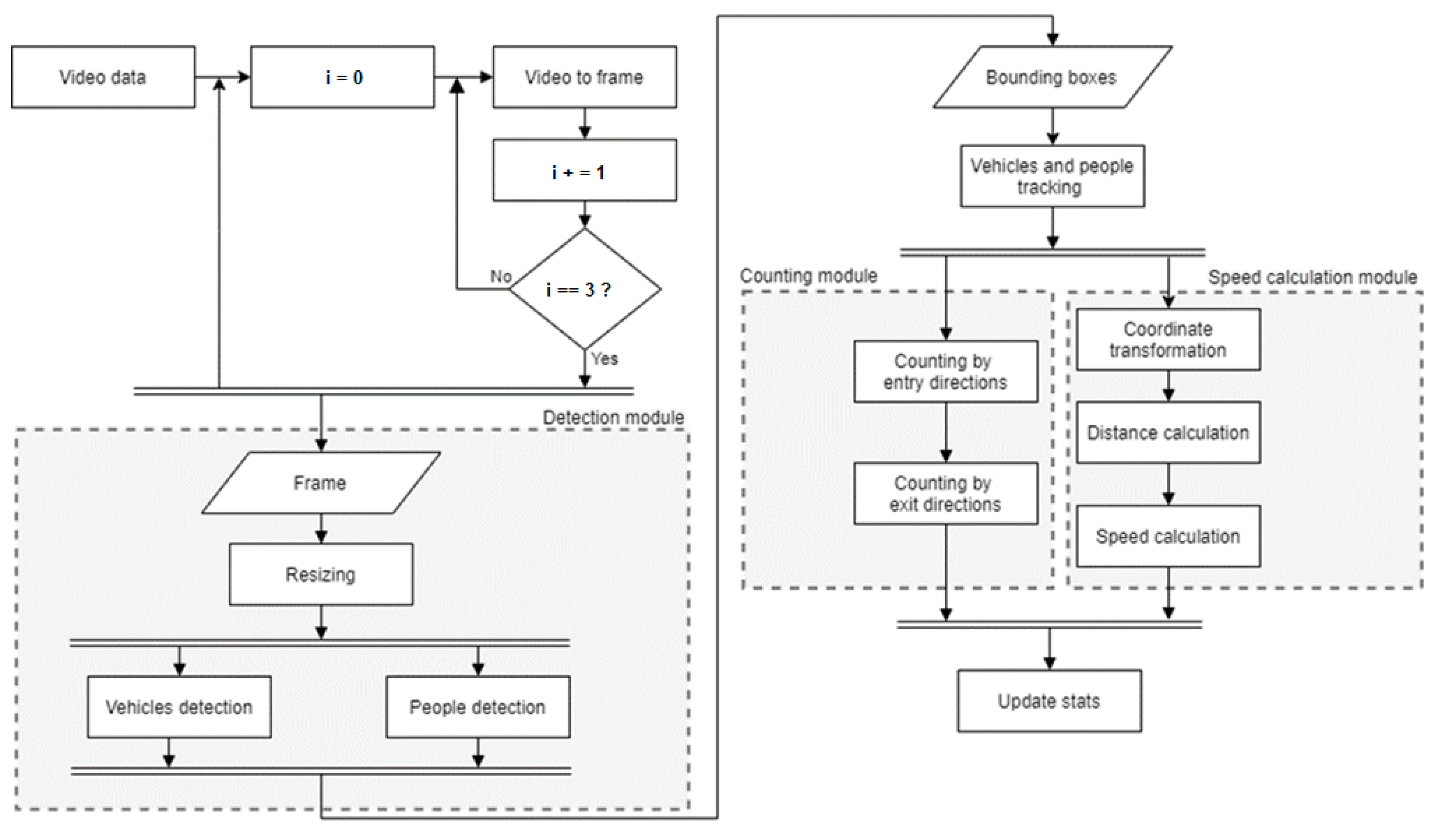
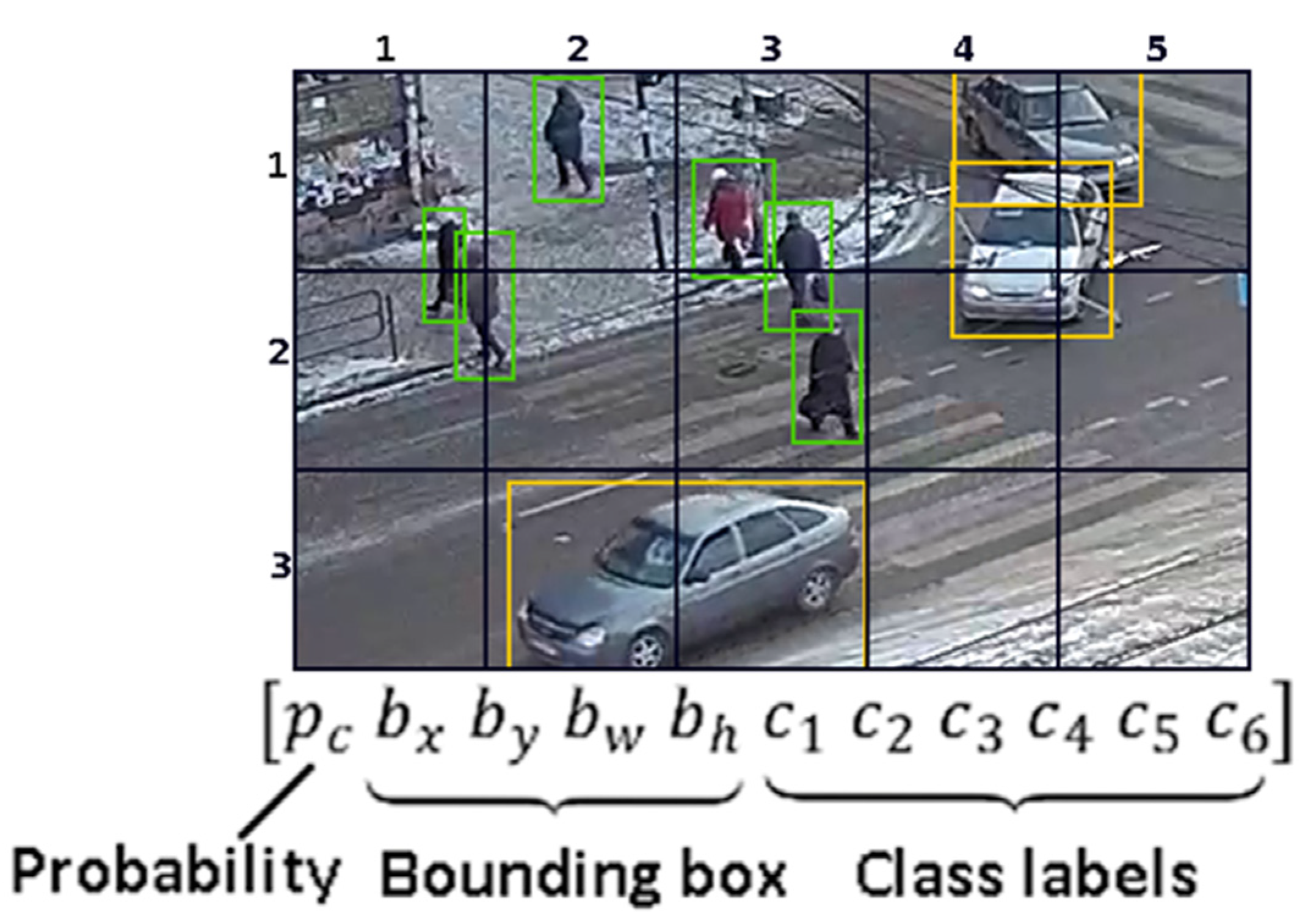
2.1. Real-Time Tracking of Vehicle and Pedestrian Movement from Street Surveillance Cameras
2.2. A Conceptual Model of an Intersection, Right Turn
- constant: the geometry of the intersection, the quality of the road surface, line-of-sight interference, and other factors that are invariable over a long period of time; and
- variable or random: weather conditions, light conditions, two-way pedestrian flow, traffic intensity, and more.
2.2.1. A Complete Regression Model
2.2.2. Minimization of the Regression Model
2.3. Simulation Modelling
2.3.1. A Static Intersection Model
2.3.2. A Continuous-Stochastic Pedestrian Flow Model
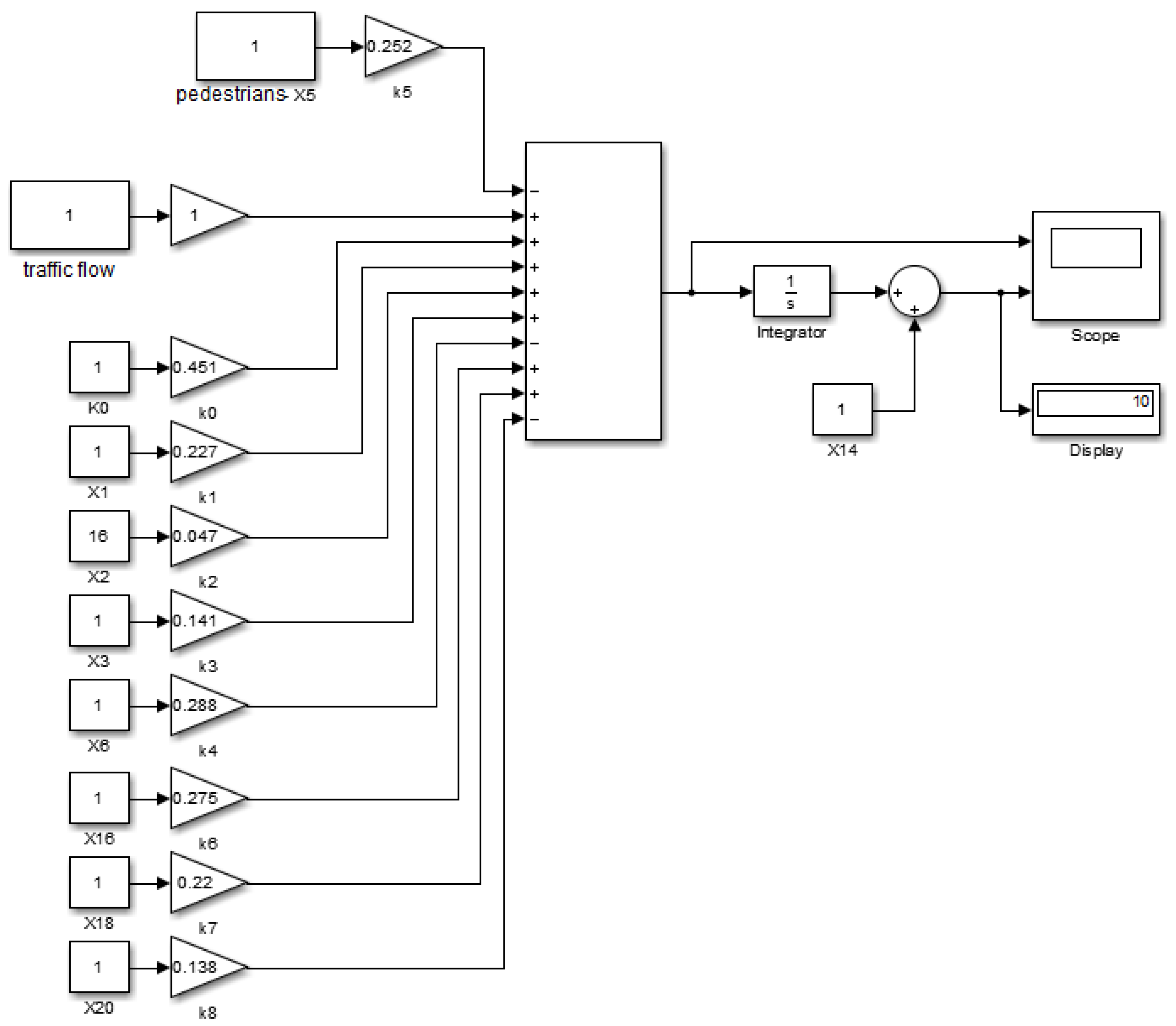
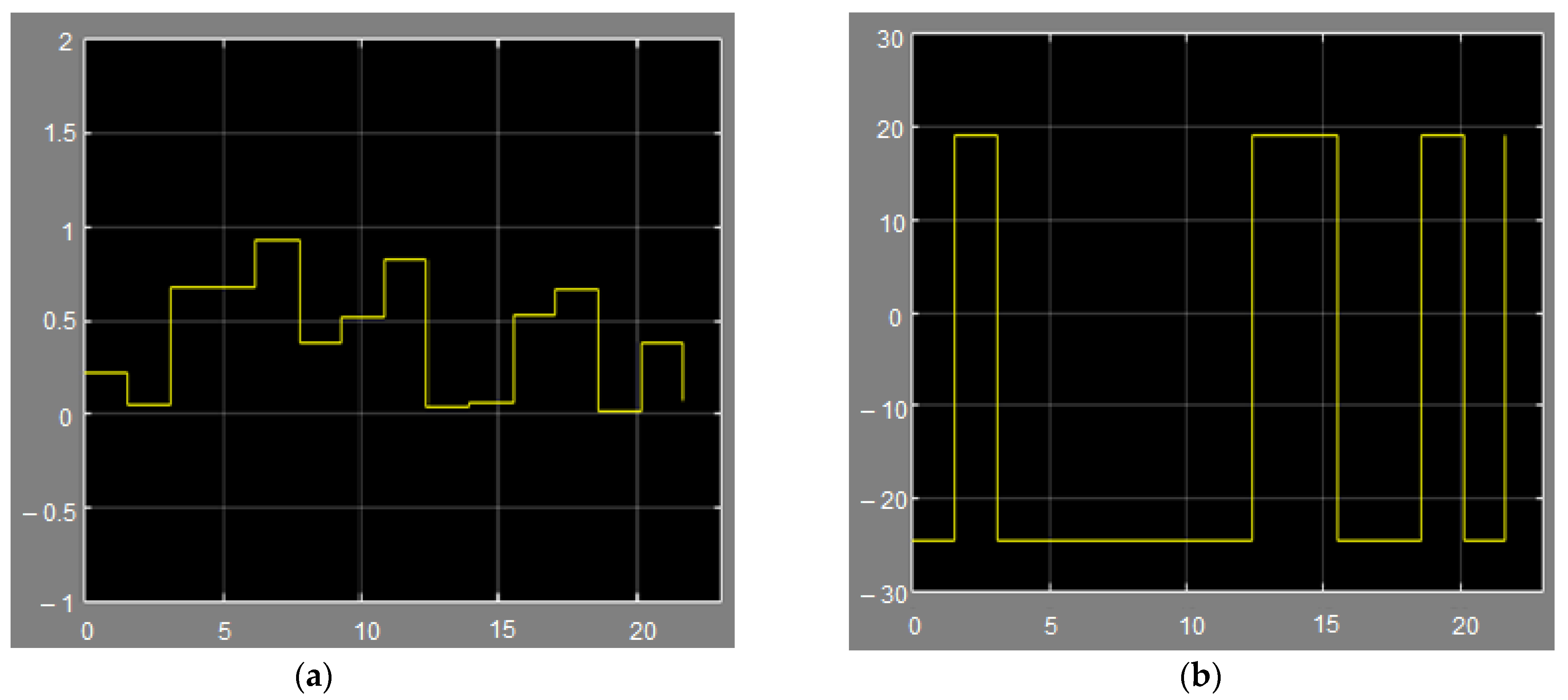
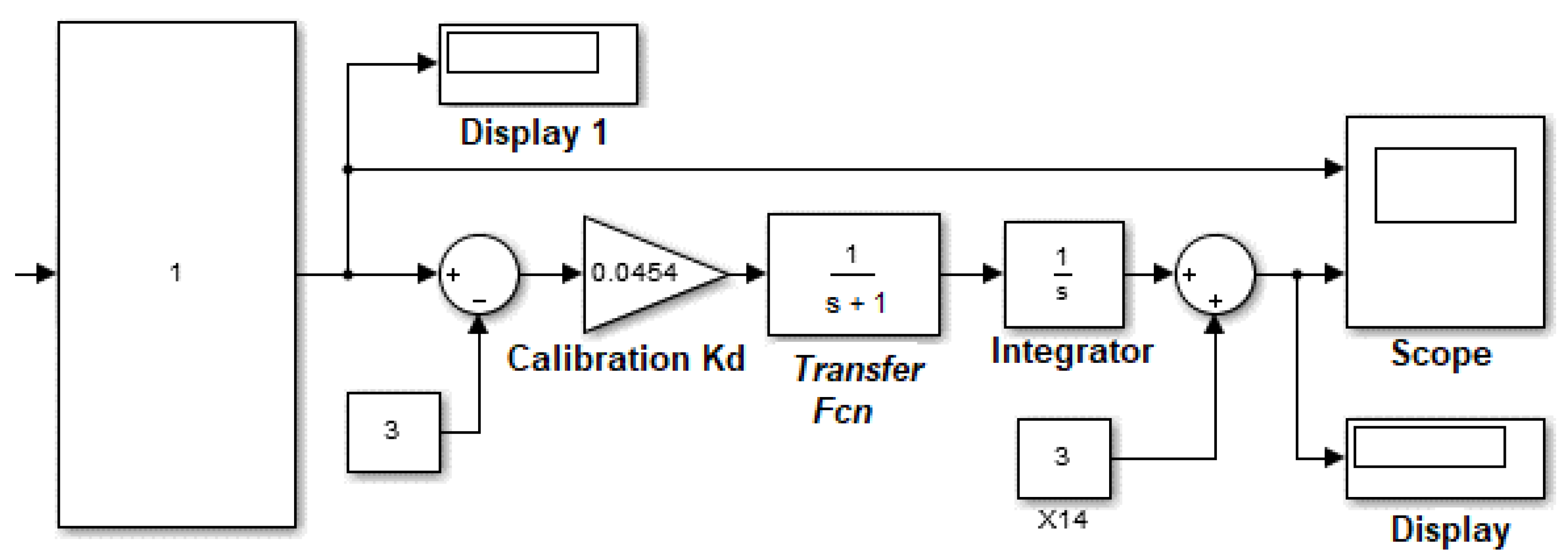
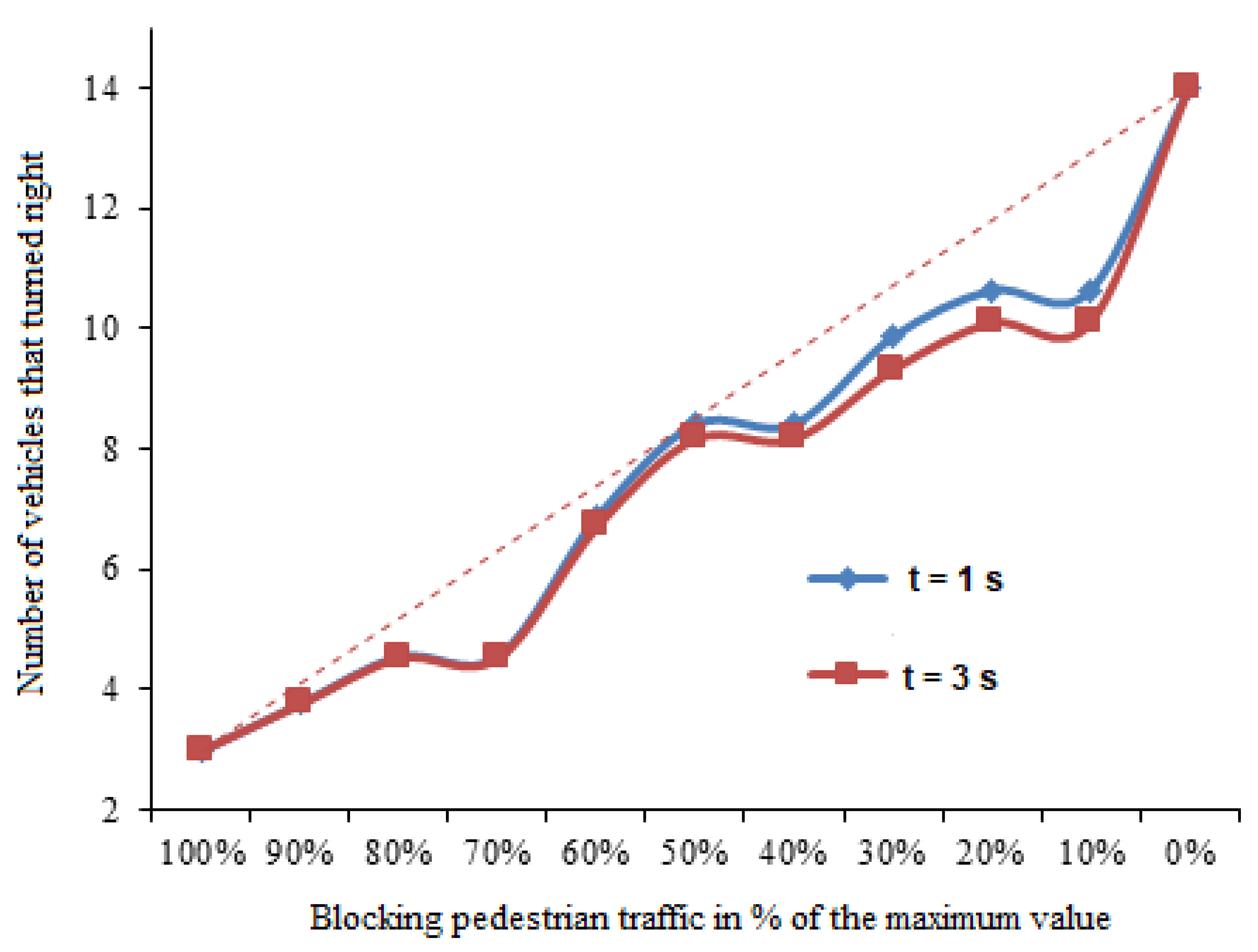
2.3.3. Simulation of the Inertial Vehicle Flow
3. Results
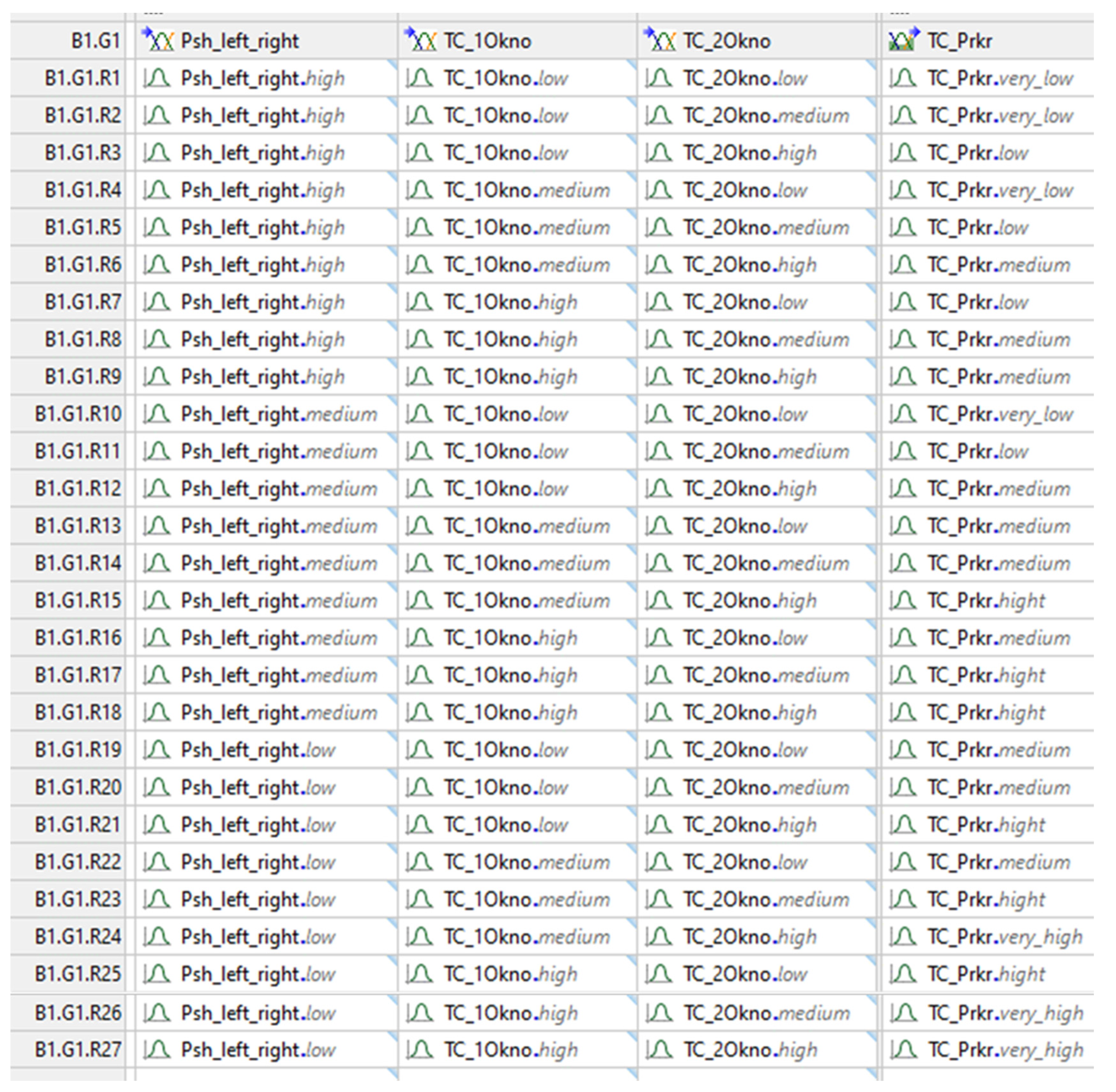
3.1. Predicting Traffic Capacity Using the Fuzzy Logic Method
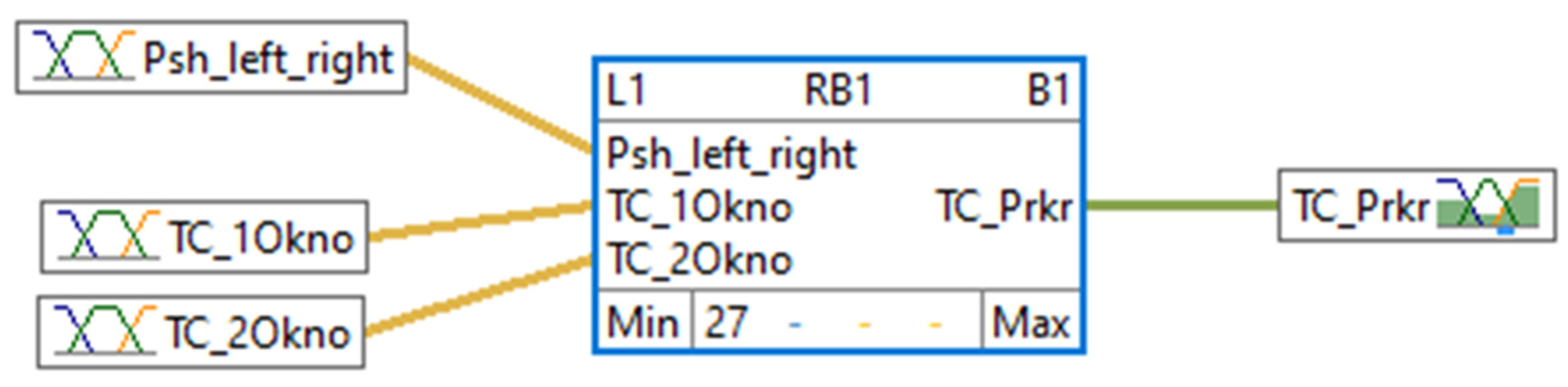
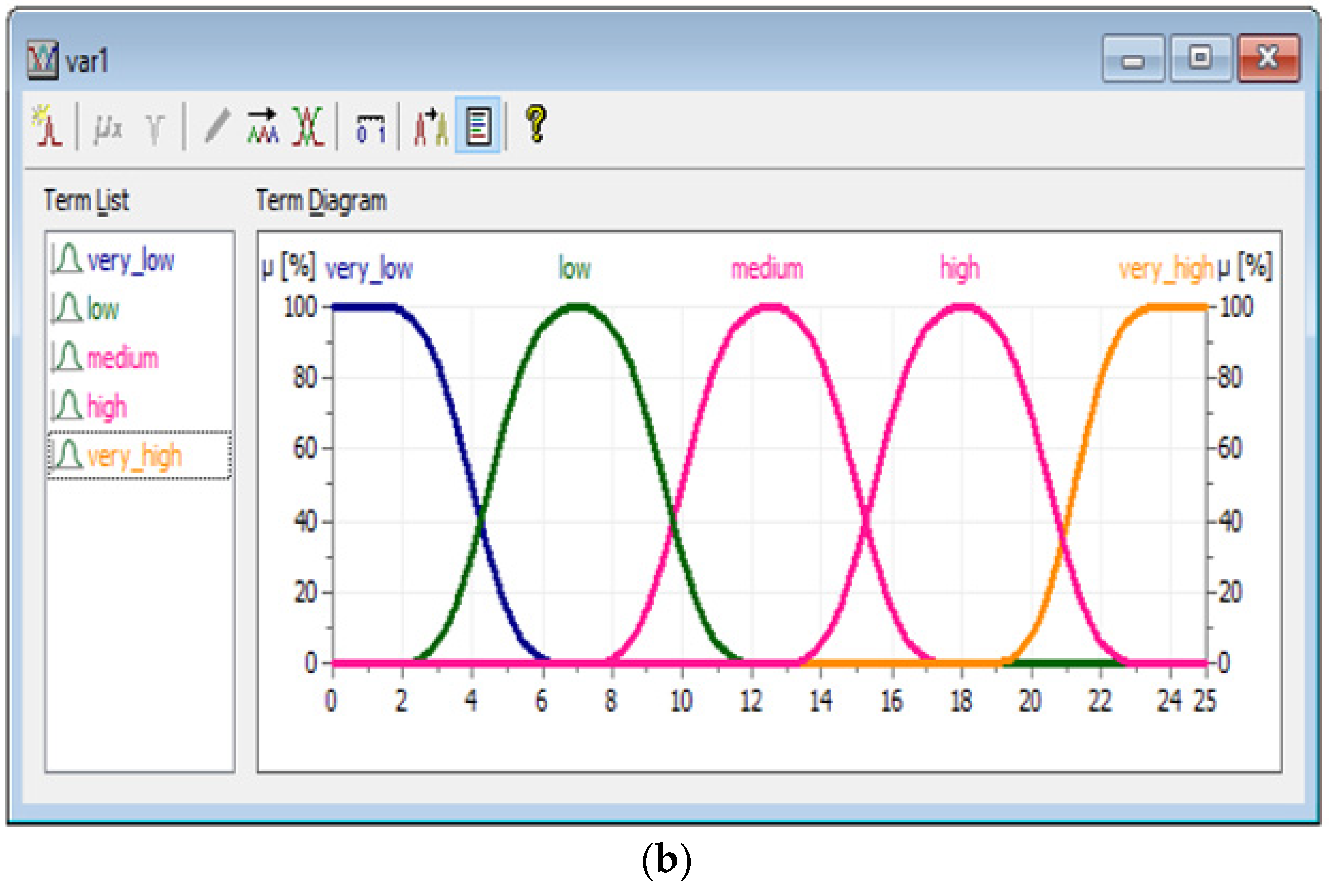
The Development of the Model
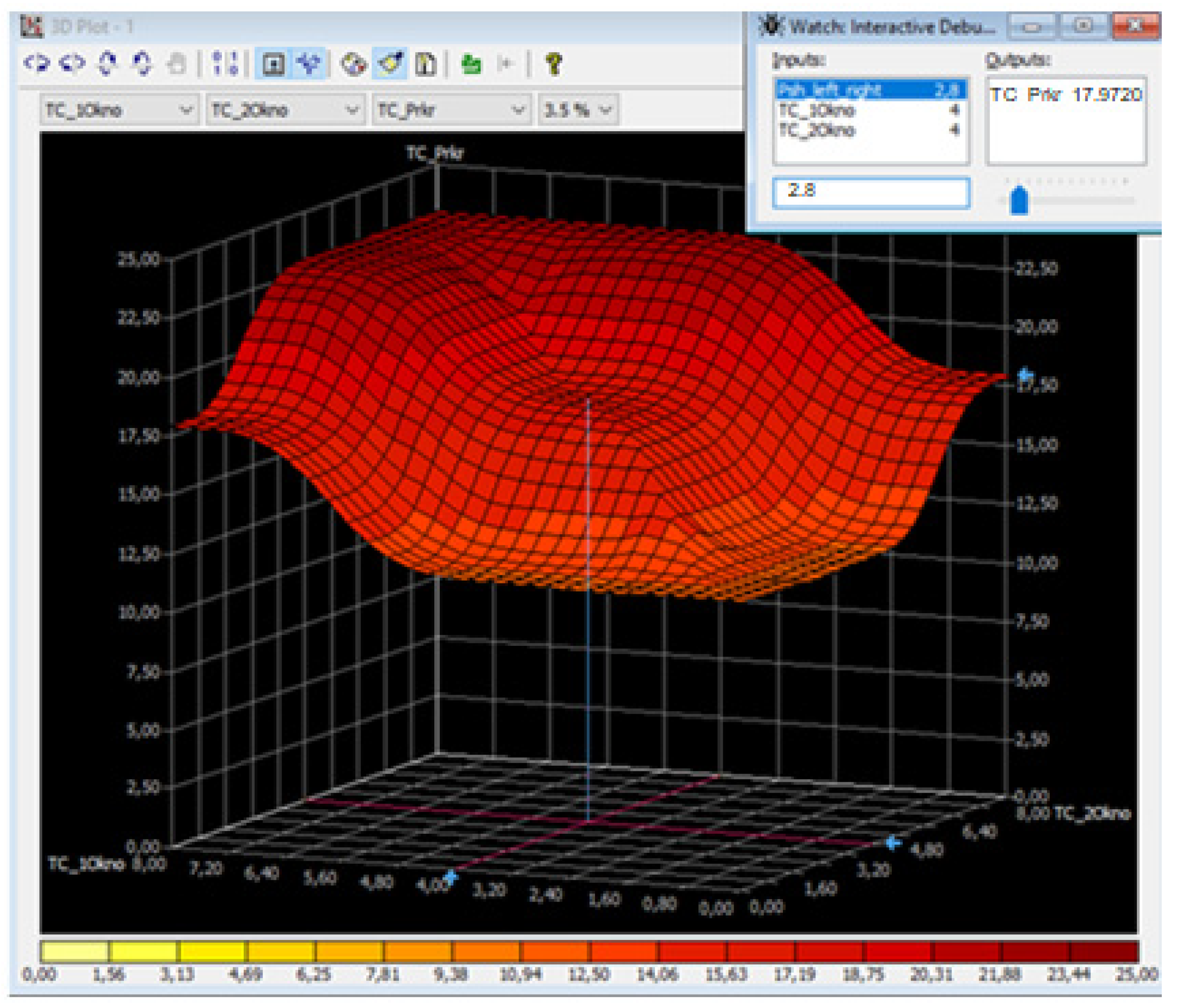
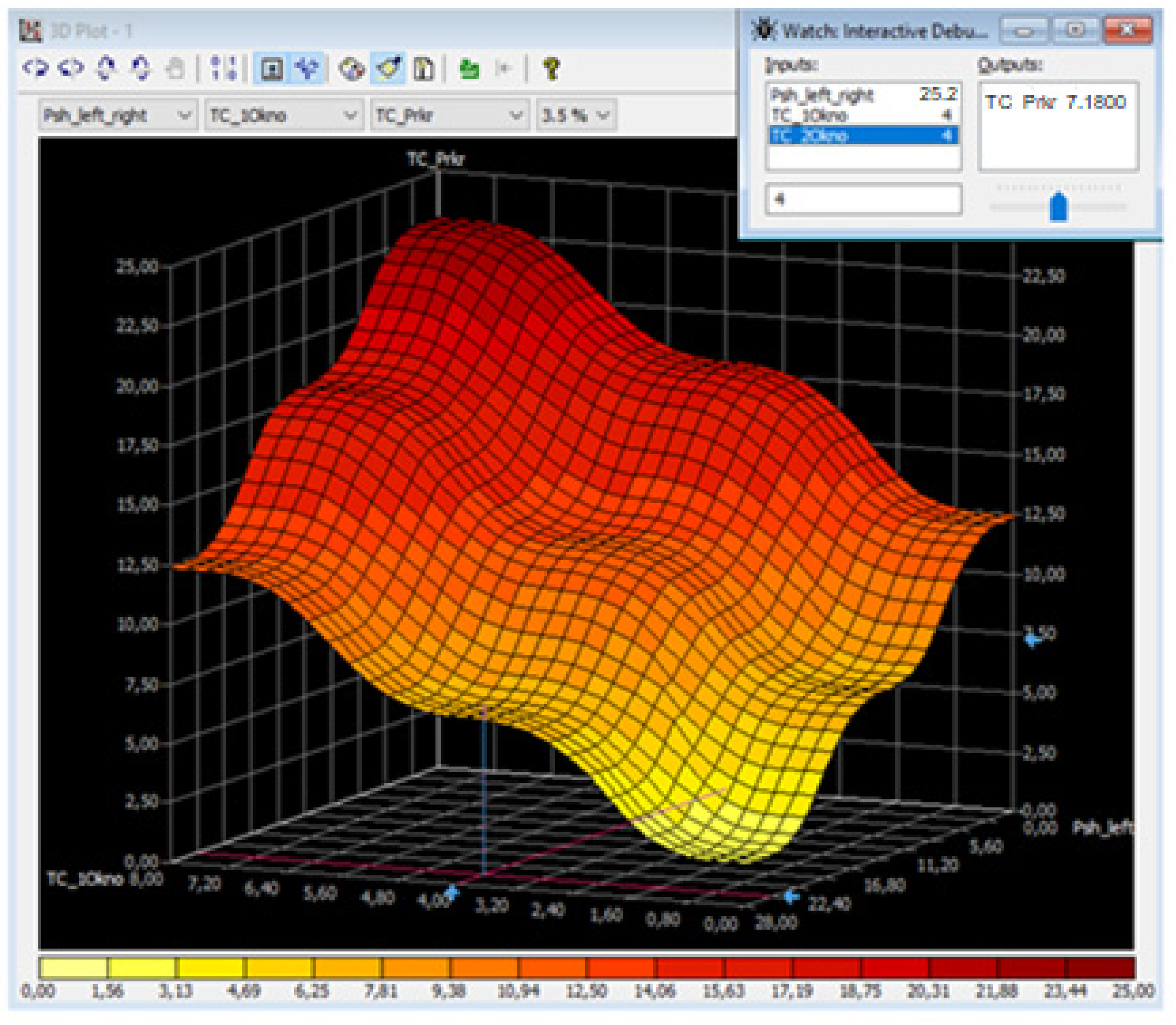
3.2. Visualization of Predictive Situations
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Buch, N.; Velastin, S.A.; Orwell, J. A Review of Computer Vision Techniques for the Analysis of Urban Traffic. IEEE Trans. Intell. Transp. Syst. 2011, 12, 920–939. [Google Scholar] [CrossRef]
- Kazhaev, A.; Almetova, Z.; Shepelev, V.; Shubenkova, K. Modelling Urban Route Transport Network Parameters with Traffic, Demand and Infrastructural Limitations Being Considered. In IOP Conference Series: Earth and Environmental Science, Proceedings of 3rd International Conference on Sustainable, Moscow, Russia, 18 May 2018; Institute of Physics Publishing: Bristol, UK, 2018; Volume 177, p. 012018. [Google Scholar]
- Zaki, M.; Sayed, T.; Tageldin, A.; Hussein, M. Application of Computer Vision to Diagnosis of Pedestrian Safety Issues. Transp. Res. Record. 2013, 2393, 75–84. [Google Scholar] [CrossRef]
- Qi, B.; Zhao, W.; Zhang, H.; Jin, Z.; Wang, X.; Runge, T. Automated Traffic Volume Analytics at Road Intersections Using Computer Vision Techniques. In Proceedings of the 5th International Conference on Transportation Information and Safety, Liverpool, UK, 14–17 July 2019; IEEE: Piscataway, NJ, USA, 2019; Volume 8883683, pp. 161–169. [Google Scholar]
- Serrano, Á.; Conde, C.; Rodríguez-Aragón, L.J.; Montes, R.; Cabello, E. Computer Vision Application: Real Time Smart Traffic Light. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), Proceedings of the 10th International Conference on Computer Aided Systems Theory, las Palmas de Gran Canaria, 7–11 February 2005; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3643, pp. 525–530. [Google Scholar]
- Prasad, D.; Kapadni, K.; Gadpal, A.; Visave, M.; Sultanpure, K. HOG, LBP and SVM Based Traffic Density Estimation at Intersection. In Proceedings of the 2nd IEEE Pune Section International Conference, Pune, India, 18–20 December 2019; IEEE: Piscataway, NJ, USA, 2019; p. 9105731. [Google Scholar]
- Shepelev, V.; Aliukov, S.; Glushkov, A.; Shabiev, S. Identification of Distinguishing Characteristics of Intersections Based on Statistical Analysis and Data from Video Cameras. J. Big Data 2020, 7, 46. [Google Scholar] [CrossRef]
- Echab, H.; Ez-Zahraouy, H. Dynamic Characteristics of Traffic Flow with Consideration of Crossing Pedestrians’ Behaviour at a Nonsignalized T-Shaped Intersection. Int. J. Modern Physics C 2017, 28, 1750134. [Google Scholar] [CrossRef]
- Jingxin, X.; Mei, C. Defining Traffic Flow Phases Using Intelligent Transportation Systems-Generated Data. J. Intell. Transp. Syst. Technol. Plann. Oper. 2007, 11, 15–24. [Google Scholar]
- Jeon, H.; Lee, J.; Sohn, K. Artificial Intelligence for Traffic Signal Control Based Solely on Video Images. J. Intell. Transp. Syst. Technol. Plann. Oper. 2018, 22, 433–445. [Google Scholar] [CrossRef]
- Munder, S.; Gavrila, D.M. An Experimental Study on Pedestrian Classification. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1863–1868. [Google Scholar] [CrossRef]
- Zhang, S.; Abdel-Aty, M.; Yuan, J.; Li, P. Prediction of Pedestrian Crossing Intentions at Intersections Based on Long Short-Term Memory Recurrent Neural Network. Transp. Res. Rec. 2020, 2674, 57–65. [Google Scholar] [CrossRef]
- Hamdani, S.; Benamar, N.; Younis, M. A Protocol for Pedestrian Crossing and Increased Vehicular Flow in Smart Cities. J. Intell. Transp. Syst. Technol. Plann. Oper. 2020, 24, 514–533. [Google Scholar] [CrossRef]
- Xu, M.; An, K.; Vu, L.H.; Ye, Z.; Feng, J.; Chen, E. Optimizing multi-agent based urban traffic signal control system. J. Intell. Transp. Syst. Technol. Plann. Oper. 2019, 23, 357–369. [Google Scholar] [CrossRef]
- Lv, J.; Zhang, Y.; Zietsman, J. Investigating Emission Reduction Benefit from Intersection Signal Optimization. J. Intell. Transp. Syst. Technol. Plann. Oper. 2013, 17, 200–209. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot Multibox Detector. In Lecture Notes in Computer Science, Proceedings of the 14th European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; Springer International Publishing AG: New York, NY, USA, 2016; Volume 9905, pp. 21–37. [Google Scholar]
- Tang, J.; Zhang, X.; Yin, W.; Zou, Y.; Wang, Y. Missing Data Imputation for Traffic Flow Based on Combination of Fuzzy Neural Network And Rough Set Theory. J. Intell. Transp. Syst. Technol. Plann. Oper. 2020, 25, 439–454. [Google Scholar] [CrossRef]
- Bi, Y.; Sun, Z.; Lu, X.; Sun, Z.; Liu, D.; Liu, K. Adaptive Type-2 Fuzzy Traffic Signal Control with On-Line Optimization. J. Intel. Fuzzy Sys. 2018, 35, 1889–1904. [Google Scholar] [CrossRef]
- Doǧan, E.; Akgüngör, A.P. Optimizing a Fuzzy Logic Traffic Signal Controller via the Differential Evolution Algorithm under Different Traffic Scenarios. Simulation 2016, 92, 1013–1023. [Google Scholar] [CrossRef]
- Hejun, W.; Changyun, M.; Ji, W.; Jianxiong, L. Research of Intelligent Traffic Light Control Scheme Based on Fuzzy Control. In Proceedings of the 2011 International Symposium on Computer Science and Society, Kota Kinabalu, Malaysia, 16–17 July 2011; IEEE: Piscataway, NJ, USA, 2011; Volume 6004279, pp. 111–113. [Google Scholar]
- Shirvani Shiri, M.J.; Maleki, H.R. Maximum Green Time Settings for Traffic-Actuated Signal Control at Isolated Intersections Using Fuzzy Logic. Int. J. Fuzzy Syst. 2017, 19, 247–256. [Google Scholar] [CrossRef]
- Castano, F.; Beruvides, G.; Haber, R.; Artunedo, A. Obstacle Recognition Based on Machine Learning for On-Chip LiDAR Sensors in a Cyber-Physical System. Sensors 2017, 17, 2109. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Ye, Z. Short-term Traffic Flow Forecasting Using Fuzzy Logic System Methods. J. Intell. Transp. Syst. Technol. Plann. Oper. 2008, 12, 102–112. [Google Scholar] [CrossRef]
- Murat, Y.S.; Gedizlioglu, E. A Fuzzy Logic Multi-Phased Signal Control Model for Isolated Junctions. Transp. Res. Part C Emerg. Technol. 2005, 13, 19–36. [Google Scholar] [CrossRef]
- Li, J.; Zhang, H. Study on Optimal Control and Simulation for Urban Traffic Based on Fuzzy Logic. In Proceedings of the International Conference on Intelligent Computation Technology and Automation, Changsha, Hunan, India, 20–22 October 2008; IEEE: Piscataway, NJ, USA, 2008; Volume 1, pp. 936–940. [Google Scholar]
- Wu, S.; Bi, Y.; Wang, G.; Ma, Y.; Lu, M.; Xu, K. Adaptive Fuzzy Logic Traffic Signal Control Based on Cuckoo Search Algorithm. Smart Innov. Syst. Technol. 2019, 127, 107–117. [Google Scholar]
- Clara Fang, F.; Pham, C.V. An Intelligent Traffic Signal Control System Based on Fuzzy Theory. In Proceedings of the 19th COTA International Conference of Transportation Professionals: Transportation in China–Connecting the World, Nanjing, China, 6–8 July 2019; Zhang, L., Ma, J., Liu, P., Zhang, G., Eds.; American Society of Civil Engineers: Reston, VA, USA, 2019. [Google Scholar]
- Reis, V. A Disaggregated Freight Transport Market Model Based on Agents and Fuzzy Logic. Transp. B 2019, 7, 363–385. [Google Scholar] [CrossRef]
- Lyapin, S.; Rizaeva, Y.; Kadasev, D.; Voronin, N. Application of simulation modelling to improve the functioning of the module of intelligent transport and logistics system. In Proceedings of the 21st International Conference “Complex Systems: Control and Modeling Problems”, Samara, Russia, 3–6 September 2019; IEEE: Piscataway, NJ, USA, 2019; Volume 8976553, pp. 143–147. [Google Scholar]
- Kieu, L.-M.; Ngoduy, D.; Malleson, N.; Chung, E. A Stochastic Schedule-Following Simulation Model of Bus Routes. Transp. B 2019, 7, 1588–1610. [Google Scholar] [CrossRef]
- Horak, J.; Tesla, J.; Fojtik, D.; Vozenilek, V. Modelling Public Transport Accessibility with Monte Carlo Stochastic Simulations: A Case Study of Ostrava. Sustainability 2019, 11, 7098. [Google Scholar] [CrossRef] [Green Version]
- Pulugurta, S.; Madhu, E.; Kayitha, R. Fuzzy logic-based Travel Demand Model to Simulate Public Transport Policies. J. Urban Plann. Dev. 2015, 141, 04014044. [Google Scholar] [CrossRef]
- Khazukov, K.; Shepelev, V.; Karpeta, T.; Shabiev, S.; Slobodin, I.; Charbadze, I.; Alferova, I. Real-time Monitoring of Traffic Parameters. J. Big Data 2020, 7, 84. [Google Scholar] [CrossRef]
- Video Surveillance of Intersections and Streets in Chelyabinsk in Real Time. Available online: https://cams.is74.ru/live (accessed on 20 June 2021).
- Redmon, J.; Farhadi, A. YOLOv3: Incremental Iimprovement. 8 April 2018. Available online: https://arxiv.org/pdf/1804.02767.pdf (accessed on 25 August 2021).
- Lin, T.U.; Goyal, P.; Girshik, R.; He, K.; Dollar, P. Focal Loss for Defense Object Definition. 2017. Available online: https://arxiv.org/pdf/1708.02002.pdf (accessed on 14 August 2021).
- Kuhn, H.W. The Hungarian Method for the Assignment Problem. Nav. Res. Logist. Q. 1955, 2, 83–97. [Google Scholar] [CrossRef] [Green Version]
- Kalman, R.A. New Approach to Linear Filtering and Forecasting Problems. J. Fluids Eng. Trans. ASME 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factors | ki | ki stand | rxy | |
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 |
| x1 | Duration of the green traffic light, s | 0.303 | 1.275 | 0.438 |
| x2 | L1 (from the stop line to the rounding), m | −0.184 | −0.396 | 0.017 |
| x3 | L2 (arc of the turn), m | 0.189 | 0.573 | 0.296 |
| x4 | L3 (approaching the pedestrian crossing), m | 0.049 | 0.062 | 0.278 |
| x5 | Number of pedestrians in the direction of vehicle movement (to the right), people | −0.117 | −0.159 | −0.390 |
| x6 | Number of pedestrians in the direction of vehicle movement (to the left), people | −0.280 | −0.417 | −0.529 |
| x7 | Duration of the 1st free window, s | −0.099 | −0.268 | 0.188 |
| x8 | Number of vehicles passing through the 1st window, pcs. | 0.272 | 0.232 | 0.267 |
| x9 | Duration of the 2nd free window, s | 0.102 | 0.166 | 0.146 |
| x10 | Number of vehicles passing through the 2nd window, pcs. | 0.461 | 0.426 | 0.373 |
| x11 | Duration of the 3rd free window, s | −0.392 | −0.210 | −0.109 |
| x12 | Number of vehicles passing through the 3rd window, pcs. | 0.531 | 0.106 | −0.016 |
| x13 | Time to pass through a free window, s | 0.056 | 0.098 | −0.062 |
| x14 | Number of vehicles in the queue, pcs. | 0.099 | 0.098 | 0.282 |
| x15 | t1—travel time of the 1st vehicle along L1, s | −0.068 | −0.046 | −0.054 |
| x16 | t2—travel time of the 2nd vehicle along L2, s | 0.242 | 0.250 | 0.009 |
| x17 | t3—travel time of the 3rd vehicle along L3, s | 0.110 | 0.041 | 0.115 |
| x18 | t4—time for the 1st vehicle to leave the pedestrian crossing, s | 0.358 | 0.522 | −0.185 |
| x19 | Number of vehicles completing their passage at the red traffic light, pcs. | 0.013 | 0.005 | −0.220 |
| x20 | Sampling for the maximum possible number of vehicles passing without pedestrians, pcs. | −0.360 | −0.752 | 0.358 |
| Yps | Actual number of passing cars, pcs. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shepelev, V.; Glushkov, A.; Bedych, T.; Gluchshenko, T.; Almetova, Z. Predicting the Traffic Capacity of an Intersection Using Fuzzy Logic and Computer Vision. Mathematics 2021, 9, 2631. https://doi.org/10.3390/math9202631
Shepelev V, Glushkov A, Bedych T, Gluchshenko T, Almetova Z. Predicting the Traffic Capacity of an Intersection Using Fuzzy Logic and Computer Vision. Mathematics. 2021; 9(20):2631. https://doi.org/10.3390/math9202631
Chicago/Turabian StyleShepelev, Vladimir, Alexandr Glushkov, Tatyana Bedych, Tatyana Gluchshenko, and Zlata Almetova. 2021. "Predicting the Traffic Capacity of an Intersection Using Fuzzy Logic and Computer Vision" Mathematics 9, no. 20: 2631. https://doi.org/10.3390/math9202631
APA StyleShepelev, V., Glushkov, A., Bedych, T., Gluchshenko, T., & Almetova, Z. (2021). Predicting the Traffic Capacity of an Intersection Using Fuzzy Logic and Computer Vision. Mathematics, 9(20), 2631. https://doi.org/10.3390/math9202631