
Evaluating Popular Statistical Properties of Incomplete Block Designs: A MATLAB Program Approach


Abstract
:1. Introduction
2. Materials and Methods
2.1. Algebraic Basis for the Program
2.2. Theoretical ComputatioN of the EfficieNcy Criteria
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |
| 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |
| 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 |
| 6 | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 0 |
| 0 | 6 | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 |
| 1 | 0 | 6 | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 1 |
| 1 | 1 | 0 | 6 | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 0 |
| 0 | 1 | 1 | 0 | 6 | 0 | 1 | 1 | 0 | 1 | 0 | 1 |
| 1 | 0 | 1 | 1 | 0 | 6 | 0 | 1 | 1 | 0 | 1 | 0 |
| 0 | 1 | 0 | 1 | 1 | 0 | 6 | 0 | 1 | 1 | 0 | 1 |
| 1 | 0 | 1 | 0 | 1 | 1 | 0 | 6 | 0 | 1 | 1 | 0 |
| 0 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 6 | 0 | 1 | 1 |
| 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 6 | 0 | 1 |
| 1 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 6 | 0 |
| 0 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 6 |
| 3 | 0 | −0.5 | −0.5 | 0 | −0.5 | 0 | −0.5 | 0 | −0.5 | −0.5 | 0 |
| 0 | 3 | 0 | −0.5 | −0.5 | 0 | −0.5 | 0 | −0.5 | 0 | −0.5 | −0.5 |
| −0.5 | 0 | 3 | 0 | −0.5 | −0.5 | 0 | −0.5 | 0 | −0.5 | 0 | −0.5 |
| −0.5 | −0.5 | 0 | 3 | 0 | −0.5 | −0.5 | 0 | −0.5 | 0 | −0.5 | 0 |
| 0 | −0.5 | −0.5 | 0 | 3 | 0 | −0.5 | −0.5 | 0 | −0.5 | 0 | −0.5 |
| −0.5 | 0 | −0.5 | −0.5 | 0 | 3 | 0 | −0.5 | −0.5 | 0 | −0.5 | 0 |
| 0 | −0.5 | 0 | −0.5 | −0.5 | 0 | 3 | 0 | −0.5 | −0.5 | 0 | −0.5 |
| −0.5 | 0 | −0.5 | 0 | −0.5 | −0.5 | 0 | 3 | 0 | −0.5 | −0.5 | 0 |
| 0 | −0.5 | 0 | −0.5 | 0 | −0.5 | −0.5 | 0 | 3 | 0 | −0.5 | −0.5 |
| −0.5 | 0 | −0.5 | 0 | −0.5 | 0 | −0.5 | −0.5 | 0 | 3 | 0 | −0.5 |
| −0.5 | −0.5 | 0 | −0.5 | 0 | −0.5 | 0 | −0.5 | −0.5 | 0 | 3 | 0 |
| 0 | −0.5 | −0.5 | 0 | −0.5 | 0 | −0.5 | 0 | −0.5 | −0.5 | 0 | 3 |
| 0.5 | 0 | −0.0833 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | −0.0833 | 0 |
| 0 | 0.5 | 0 | −0.0833 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | −0.0833 |
| −0.0833 | 0 | 0.5 | 0 | −0.0833 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 |
| −0.0833 | −0.0833 | 0 | 0.5 | 0 | −0.0833 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | 0 |
| 0 | −0.0833 | −0.0833 | 0 | 0.5 | 0 | −0.0833 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 |
| −0.0833 | 0 | −0.0833 | −0.0833 | 0 | 0.5 | 0 | −0.0833 | −0.0833 | 0 | −0.0833 | 0 |
| 0 | −0.0833 | 0 | −0.0833 | −0.0833 | 0 | 0.5 | 0 | −0.0833 | −0.0833 | 0 | −0.0833 |
| −0.0833 | 0 | −0.0833 | 0 | −0.0833 | −0.0833 | 0 | 0.5 | 0 | −0.0833 | −0.0833 | 0 |
| 0 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | −0.0833 | 0 | 0.5 | 0 | −0.0833 | −0.0833 |
| −0.0833 | 0 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | −0.0833 | 0 | 0.5 | 0 | −0.0833 |
| −0.0833 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | −0.0833 | 0 | 0.5 | 0 |
| 0 | −0.0833 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | 0 | −0.0833 | −0.0833 | 0 | 0.5 |
| 1.8674 | −0.4394 | 0.0379 | −0.0417 | −0.3712 | 0.1061 | −0.4508 | 0.1061 | −0.3712 | −0.0417 | 0.0379 | −0.4394 |
| −0.4394 | 1.8674 | −0.4394 | 0.0379 | −0.0417 | −0.3712 | 0.1061 | −0.4508 | 0.1061 | −0.3712 | −0.0417 | 0.0379 |
| 0.0379 | −0.4394 | 1.8674 | −0.4394 | 0.0379 | −0.0417 | −0.3712 | 0.1061 | −0.4508 | 0.1061 | −0.3712 | −0.0417 |
| −0.0417 | 0.0379 | −0.4394 | 1.8674 | −0.4394 | 0.0379 | −0.0417 | −0.3712 | 0.1061 | −0.4508 | 0.1061 | −0.3712 |
| −0.3712 | −0.0417 | 0.0379 | −0.4394 | 1.8674 | −0.4394 | 0.0379 | −0.0417 | −0.3712 | 0.1061 | −0.4508 | 0.1061 |
| 0.1061 | −0.3712 | −0.0417 | 0.0379 | −0.4394 | 1.8674 | −0.4394 | 0.0379 | −0.0417 | −0.3712 | 0.1061 | −0.4508 |
| −0.4508 | 0.1061 | −0.3712 | −0.0417 | 0.0379 | −0.4394 | 1.8674 | −0.4394 | 0.0379 | −0.0417 | −0.3712 | 0.1061 |
| 0.1061 | −0.4508 | 0.1061 | −0.3712 | −0.0417 | 0.0379 | −0.4394 | 1.8674 | −0.4394 | 0.0379 | −0.0417 | −0.3712 |
| −0.3712 | 0.1061 | −0.4508 | 0.1061 | −0.3712 | −0.0417 | 0.0379 | −0.4394 | 1.8674 | −0.4394 | 0.0379 | −0.0417 |
| −0.0417 | −0.3712 | 0.1061 | −0.4508 | 0.1061 | −0.3712 | −0.0417 | 0.0379 | −0.4394 | 1.8674 | −0.4394 | 0.0379 |
| 0.0379 | −0.0417 | −0.3712 | 0.1061 | −0.4508 | 0.1061 | −0.3712 | −0.0417 | 0.0379 | −0.4394 | 1.8674 | −0.4394 |
| −0.4394 | 0.0379 | −0.0417 | −0.3712 | 0.1061 | −0.4508 | 0.1061 | −0.3712 | −0.0417 | 0.0379 | −0.4394 | 1.8674 |
| 0 | 0.4335 | 0.5466 | 0.5238 | 0.4467 | 0.5677 | 0.4314 | 0.5677 | 0.4467 | 0.5238 | 0.5466 | 0.4335 |
| 0 | 0 | 0.4335 | 0.5466 | 0.5238 | 0.4467 | 0.5677 | 0.4314 | 0.5677 | 0.4467 | 0.5238 | 0.5466 |
| 0 | 0 | 0 | 0.4335 | 0.5466 | 0.5238 | 0.4467 | 0.5677 | 0.4314 | 0.5677 | 0.4467 | 0.5238 |
| 0 | 0 | 0 | 0 | 0.4335 | 0.5466 | 0.5238 | 0.4467 | 0.5677 | 0.4314 | 0.5677 | 0.4467 |
| 0 | 0 | 0 | 0 | 0 | 0.4335 | 0.5466 | 0.5238 | 0.4467 | 0.5677 | 0.4314 | 0.5677 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0.4335 | 0.5466 | 0.5238 | 0.4467 | 0.5677 | 0.4314 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.4335 | 0.5466 | 0.5238 | 0.4467 | 0.5677 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.4335 | 0.5466 | 0.5238 | 0.4467 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.4335 | 0.5466 | 0.5238 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.4335 | 0.5466 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.4335 |
2.3. DescriptioN of the Program
3. Results
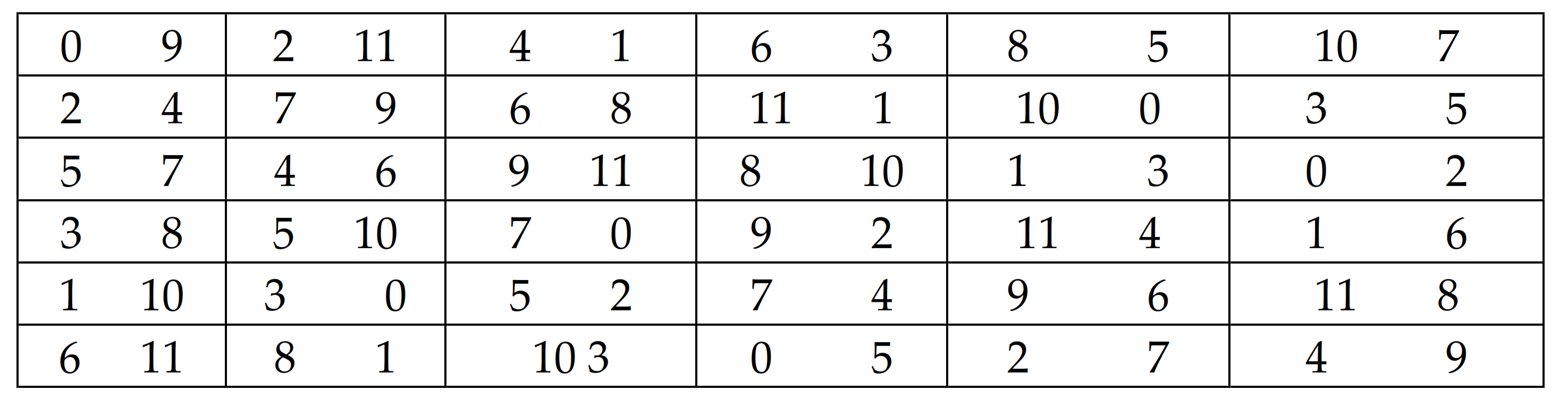
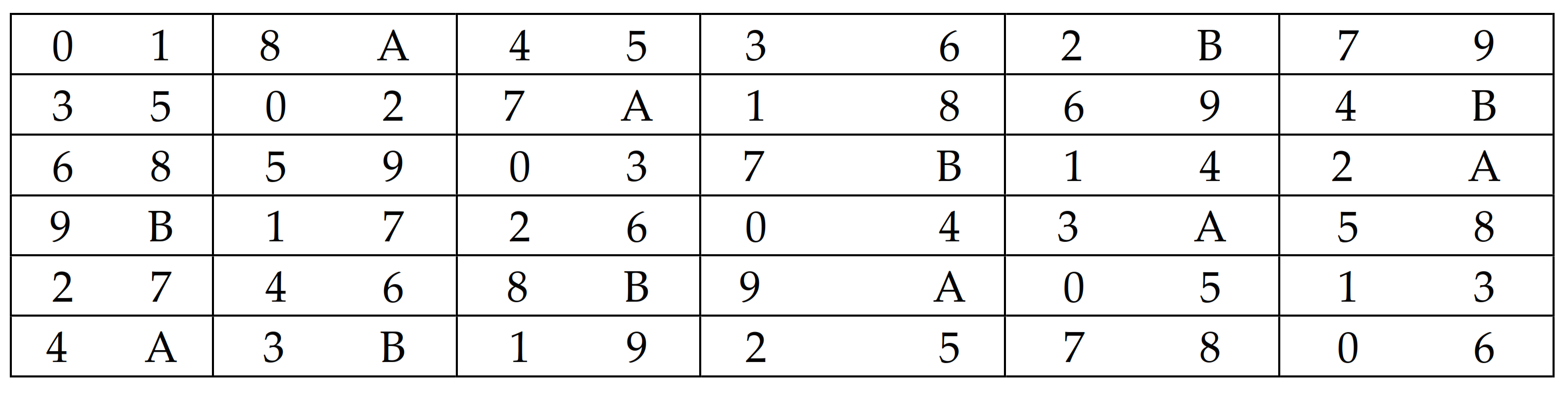
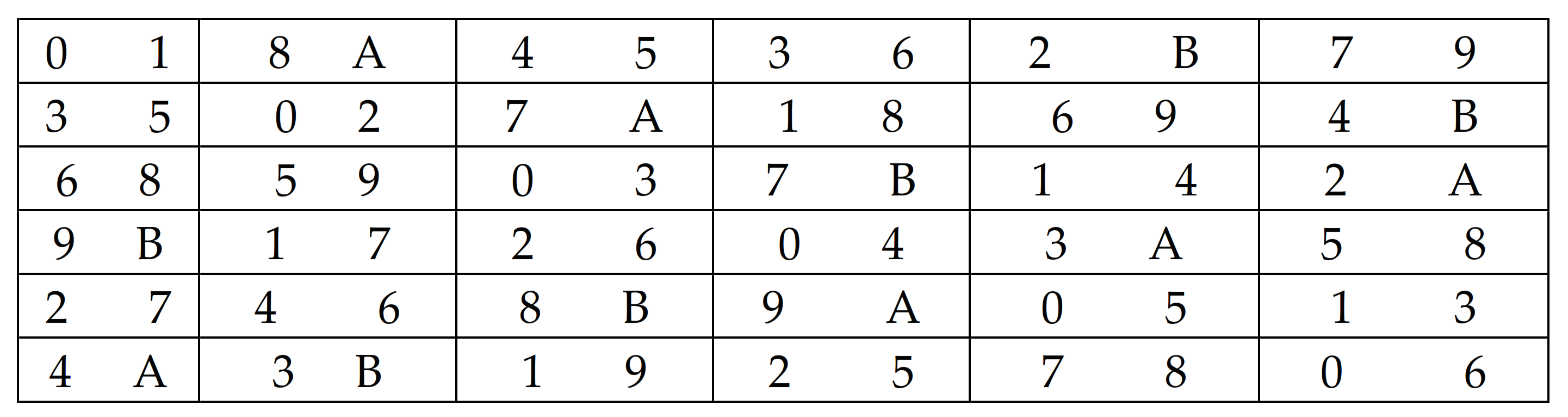
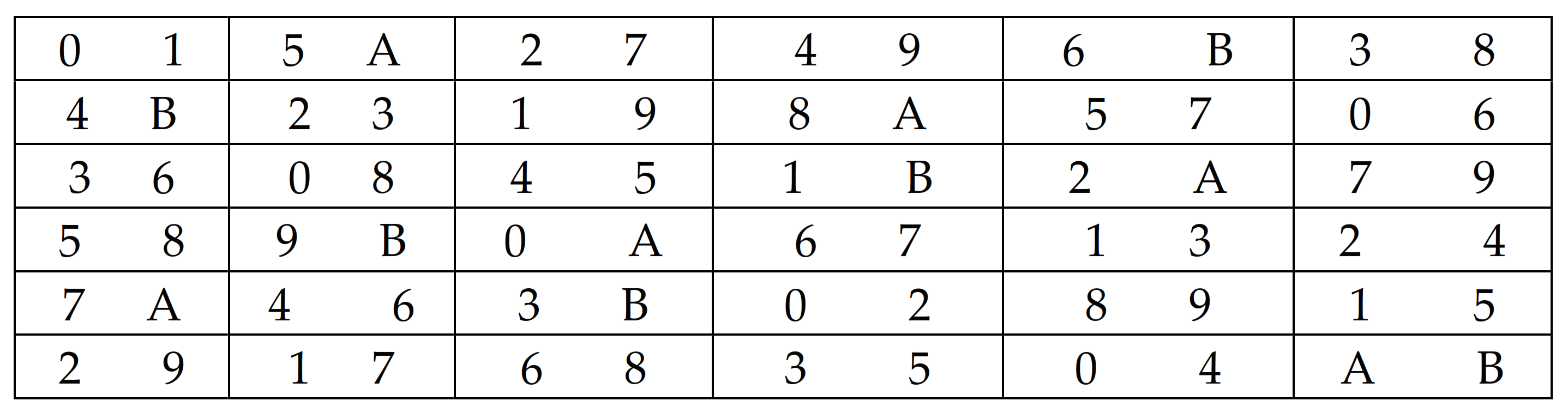
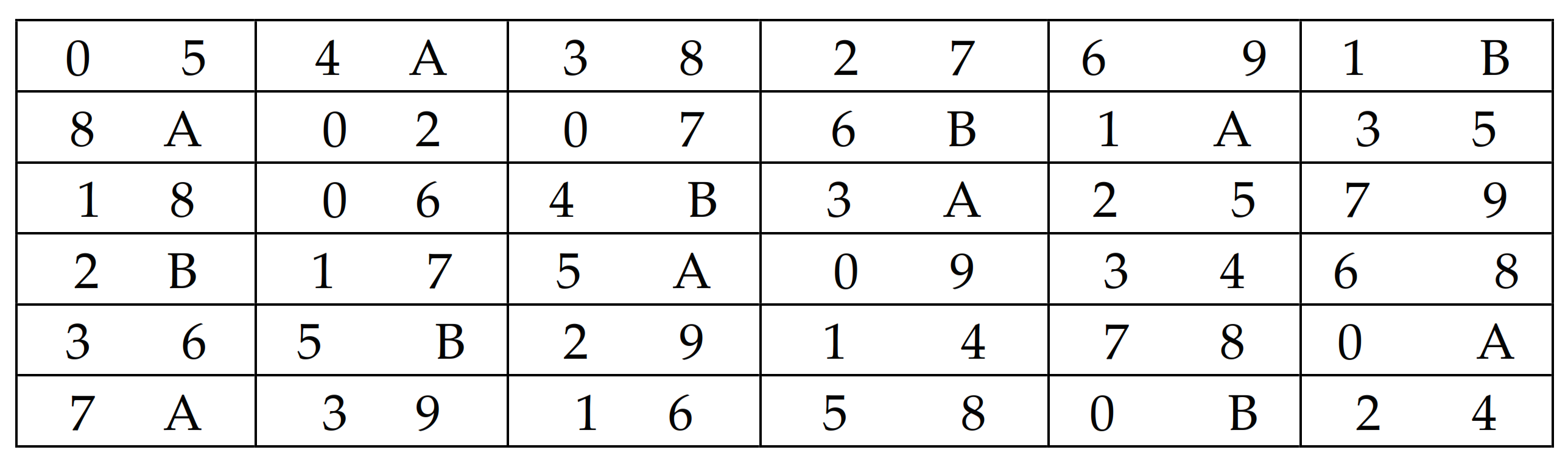
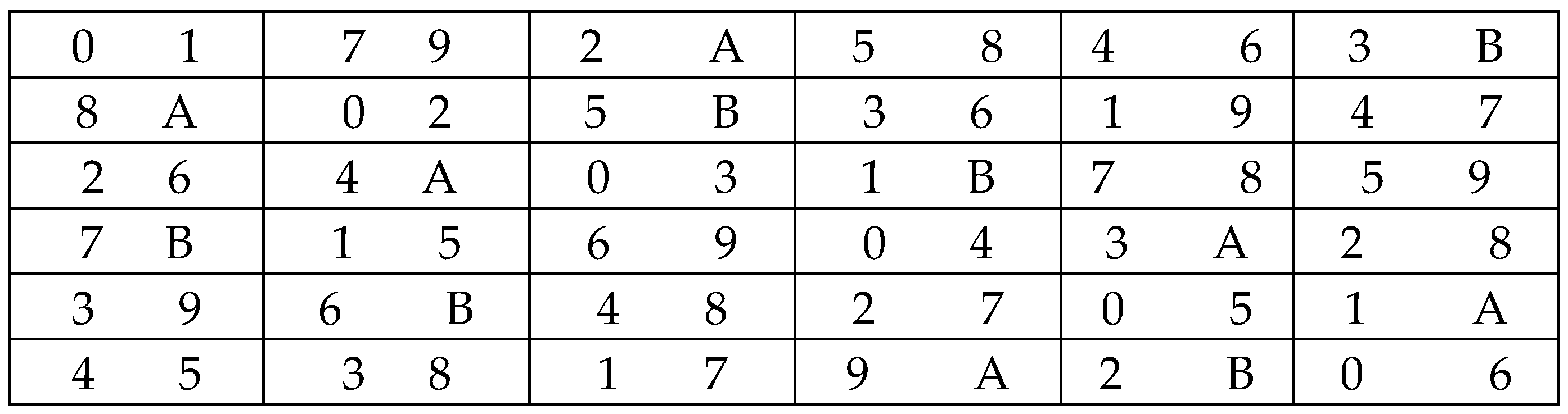
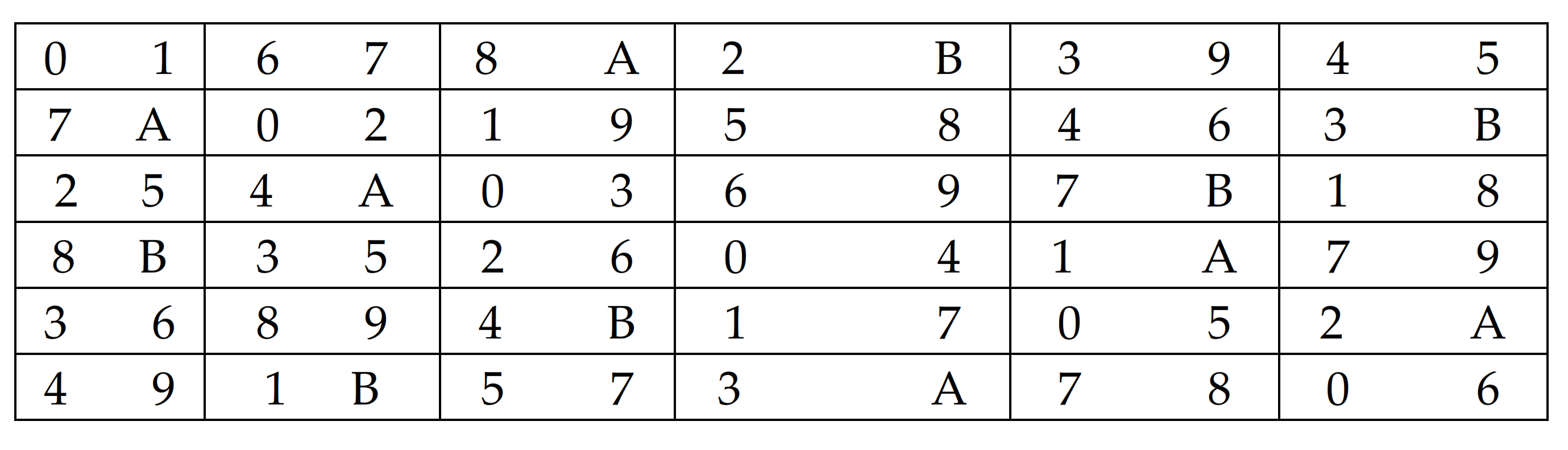
3.1. EvaluatioN of semi-LatiN squares (Bailey and Royle)
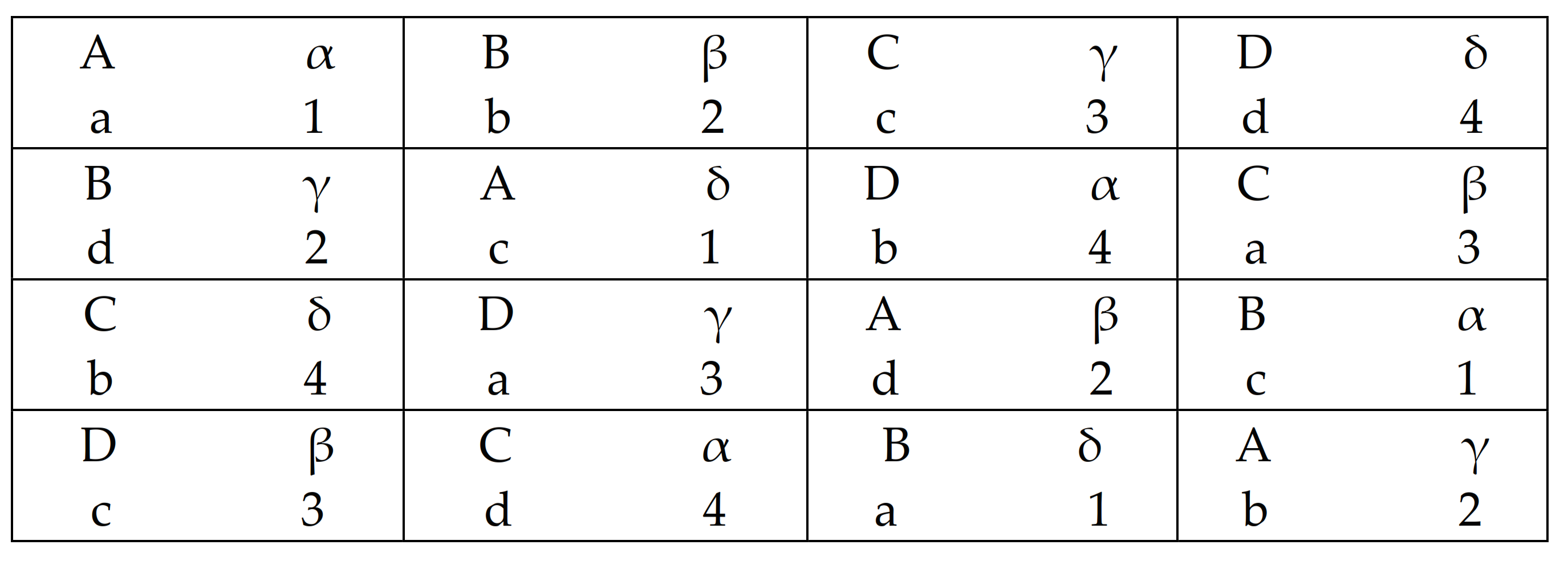
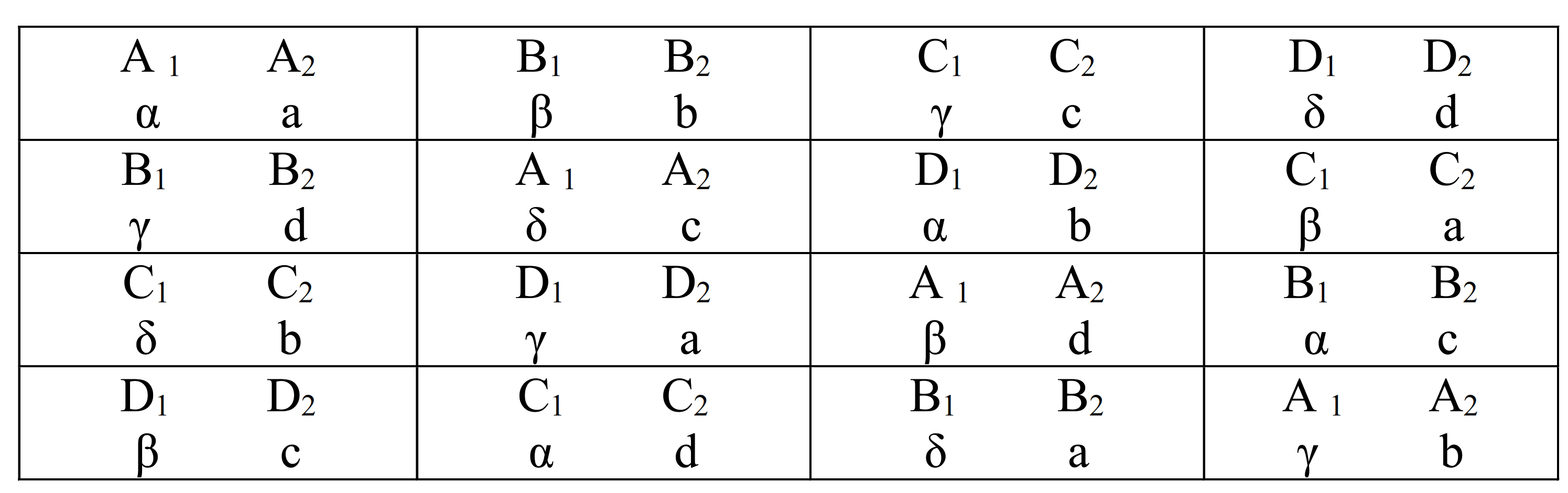
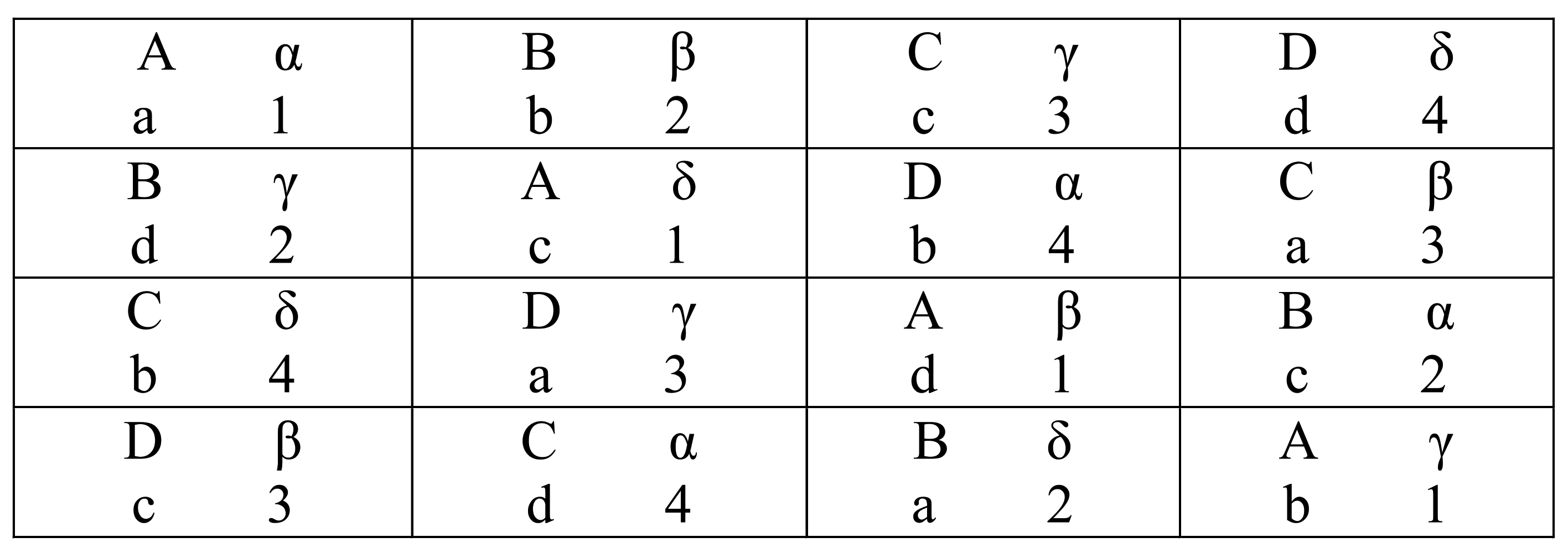
3.2. EvaluatioN of semi-LatiN square (Chigbu)
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Bedford, D.; Whitaker, R. A New Construction for efficient semi-Latin squares. J. Stat. Plan. Inf. 2001, 9, 278–292. [Google Scholar] [CrossRef]
- Bailey, R.A.; Royle, G. Optimal semi-Latin squares with side six and block size two. Proc. Roy. Soc. 1997, 453, 1904–1914. [Google Scholar] [CrossRef]
- Soicher, L.H. Optimal and efficient semi-Latin squares. J. Stat. Plan. Inf. 2013, 143, 573–582. [Google Scholar] [CrossRef]
- Bailey, R.A. Semi-Latin squares. J. Stat. Plan. Inf. 1988, 18, 299–312. [Google Scholar] [CrossRef]
- McKay, B.D. Practical graph isomorphism. Cong. Numer. 1981, 30, 45–87. [Google Scholar] [CrossRef]
- Soicher, L.H. GRAPE: A system for computing with graphs and groups. In Groups and Computation; Larry, F., William, M.K., Eds.; American Mathematical Society: Providence, RI, USA, 1993; Volume 11, pp. 287–291. [Google Scholar]
- McKay, B.D.; Piperno, A. Practical Graph Isomorphism II. J. Sym. Comp. 2014, 60, 94–112. [Google Scholar] [CrossRef]
- John, J.A. Cyclic Designs; Springer-Science+Business Media, B.V.: Berlin/Heildeberg, Germany, 1987. [Google Scholar]
- John, J.A.; Williams, E.R. Cyclic and Computer Generated Designs; Springer-Science+Business Media, B.V.: Berlin/Heildeberg, Germany, 1995. [Google Scholar]
- Hinkelmann, K.; Kempthorne, O. Design and Analysis of Experiments; John Wiley and Sons Inc.: Hoboken, NJ, USA, 2005; Volume 2. [Google Scholar]
- Morgan, J.P. Blocking with independent responses. In Handbook of Design and Analysis of Experiments; Dean, A., Morris, M., Stufken, J., Bingham, D., Eds.; Chapman and Hall/CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Soicher, L.H. The GRAPE Package for GAP. 2019. Available online: https://www.gap-system.org/Manuals/pkg/grape-4.8.3/doc/manual.pdf (accessed on 19 May 2021).
- Chigbu, P.E. The “Best” of the three optimal (4 × 4)/4 semi-Latin squares. Sankhya Indian J. Stat. 2003, 65, 641–648. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S/N | The Design | Efficiency Values by Baileyand Royle [2] | Efficiency Values from Our MATLAB Program |
|---|---|---|---|
| 1 | A-efficiency = 0.4909 | A-efficiency = 0.4909 | |
| D-efficiency = 0.5210 | D-efficiency = 0.5210 | ||
| E-efficiency = 0.2723 | E-efficiency = 0.2723 | ||
| MV-efficiency = 0.4314 | MV-efficiency = 0.4314 | ||
| 2 | A-efficiency = 0.5133 | A-efficiency = 0.5133 | |
| D-efficiency = 0.5286 | D-efficiency = 0.5286 | ||
| E-efficiency = 0.3333 | E-efficiency = 0.3333 | ||
| MV-efficiency 0.4444 | MV-efficiency = 0.4633 | ||
| 3 | A-efficiency 0.5129 | A-efficiency = 0.5127 | |
| D-efficiency 0.5283 | D-efficiency = 0.5281 | ||
| E-efficiency 0.3759 | E-efficiency = 0.3970 | ||
| MV-efficiency 0.4619 | MV-efficiency = 0.4783 | ||
| 4 | A-efficiency = 0.5127 | A-efficiency = 0.5127 | |
| D-efficiency = 0.5281 | D-efficiency = 0.5281 | ||
| E-efficiency = 0.3970 | E-efficiency = 0.3970 | ||
| MV-efficiency = 0.4783 | MV-efficiency = 0.4783 | ||
| 5 | A-efficiency = 0.5100 | A-efficiency = 0.5100 | |
| D-efficiency = 0.5271 | D-efficiency = 0.5271 | ||
| E-efficiency = 0.4167 | E-efficiency = 0.4167 | ||
| MV-efficiency = 0.4688 | MV-efficiency = 0.4688 | ||
| 6 | A-efficiency = 0.5115 | A-efficiency = 0.5115 | |
| D-efficiency = 0.5277 | D-efficiency = 0.5277 | ||
| E-efficiency = 0.3865 | E-efficiency = 0.3865 | ||
| MV-efficiency 0.4675 | MV-efficiency = 0.4692 | ||
| 7 | A-efficiency = 0.5127 | A-efficiency = 0.5127 | |
| D-efficiency = 0.5283 | D-efficiency = 0.5283 | ||
| E-efficiency = 0.3494 | E-efficiency = 0.3494 | ||
| MV-efficiency = 0.4559 | MV-efficiency = 0.4743 |
| Design | Efficiency Criteria | Efficiency Values by Chigbu [13] | Efficiency Values from MATLAB Program |
|---|---|---|---|
| A | 0.7500 | 0.7506 | |
| D | 0.7759 | 0.7761 | |
| E | 0.5000 | 0.5000 | |
| MV | - | 0.6667 | |
| A | 0.7500 | 0.7500 | |
| D | 0.7759 | 0.7759 | |
| E | 0.5000 | 0.5000 | |
| MV | - | 0.7500 | |
| A | 0.7500 | 0.7500 | |
| D | 0.7759 | 0.7759 | |
| E | 0.5000 | 0.5000 | |
| MV | - | 0.6667 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mba, E.I.; Chigbu, P.E.; Ukaegbu, E.C. Evaluating Popular Statistical Properties of Incomplete Block Designs: A MATLAB Program Approach. Mathematics 2021, 9, 1281. https://doi.org/10.3390/math9111281
Mba EI, Chigbu PE, Ukaegbu EC. Evaluating Popular Statistical Properties of Incomplete Block Designs: A MATLAB Program Approach. Mathematics. 2021; 9(11):1281. https://doi.org/10.3390/math9111281
Chicago/Turabian StyleMba, Emmanuel Ikechukwu, Polycarp Emeka Chigbu, and Eugene Chijindu Ukaegbu. 2021. "Evaluating Popular Statistical Properties of Incomplete Block Designs: A MATLAB Program Approach" Mathematics 9, no. 11: 1281. https://doi.org/10.3390/math9111281
APA StyleMba, E. I., Chigbu, P. E., & Ukaegbu, E. C. (2021). Evaluating Popular Statistical Properties of Incomplete Block Designs: A MATLAB Program Approach. Mathematics, 9(11), 1281. https://doi.org/10.3390/math9111281