Abstract
In this paper, we analyze the smooth curve of constant width using the characteristic equation of a time delay system. We prove that a closed convex curve must be a circle if it is still a smooth curve of constant width after taking any number of derivatives. Finally, the simulation results are presented for analyzing the influence of derivative orders on a smooth non-circular curve of constant width.
1. Introduction
The curves of constant width are a type of interesting curve that can be used to design precise mechanical structures [1]. Since Euler first proposed the concept of the curve of constant width, researches of the non-circular curve of constant width have attracted extensive attention [1,2,3,4]. In 1876, an engineer named Reuleaux constructed a curve of constant width that was based on an equilateral triangle, which is now known as the Reuleaux triangle. In 1997, Rabinowitz [5] investigated the non-circular curve of constant width and found its parametric equation, so as to plot the curve with a graphing calculator. In 2010, Paciotti [6] studied the curves of constant width and the shadows that they cast, and then used the shadows to distinguish different curves. In 2011, Xu et al. [7] used an isosceles trapezoid to construct another curve of constant width. This basic construction process can be generalized to construct curves of constant width that are based on special 2n-sided polygons with N groups parallel to the opposite sides. In 2015, Yang [8] constructed a non-circular curve of constant width using the opposite top sector, and the obtained curve of constant width included the results by Reuleaux and [7]. Additionally, Mozgawa [9] provided a generalization of the theorem characterizing ovals of constant width proved by Mellish [10]. Moreover, Resnikoff [11] investigated the curves and surfaces of constant width by means of Fourier series, with some additional results regarding general ovals. However, the main drawback of these methods is that the constructed curves of constant width are piecewise smooth. To address this issue, on the basis of the piecewise smooth curve, a curve of constant width with better smoothness can be constructed using the outer parallel lines [12]. In order to obtain a smoother curve of constant width, a class of smooth non-circular curves of constant width is constructed using the tangent polar coordinates of the plane curve based on the Minkowski support function [13]. However, in terms of these constructions, the first derivative of the parametric equation yields a curve with a self-intersection point, instead of a smooth curve.
Being motivated by the above analysis, it is natural to propose the following problem: whether there exists a smooth non-circular curve of constant width, such that its parametric equation after taking any number of derivatives still represents a smooth curve of constant width. In this paper, we aim to prove that there is no smooth non-circular curve of constant width in theory, so that the parametric equation after taking any number of derivatives is still a smooth curve of constant width. Moreover, the simulation results are proposed to further illustrate this hypothesis.
2. Preliminaries and a Hypothesis
Let be a smooth closed curve in the plane , and define an arbitrary point in the region that is bounded by the curve as the origin point of the plane . A positive oriented coordinate system is established as . represents the angle between the positive direction of the axis and the perpendicular line that corresponds to the tangent line of . Moreover, denotes the distance from the origin O to the tangent line of , which is called the support function of the curve .
Setting as a point on , it follows from the support function that
Differentiating both sides of (1) with respect to gives
If is a smooth closed convex curve, then its support function should satisfy the following necessary and sufficient conditions.
Lemma 1
([14]). The function of period is the support function of a smooth closed convex curve, if and only if
Now, we would like to consider an interesting curve: a smooth curve of constant width. First, we present the definition of the width of a simple closed convex curve.
Definition 1.
The width function of a closed convex curve Γ is defined as
If is a constant, then Γ is called a curve of constant width.
The smooth curve of constant width is the research objective of this paper. The so-called smooth curve means that each component of its parametric equation is infinitely differentiable, namely, is infinitely differentiable. At present, many researchers have proposed several methods to construct curves of constant width. However, these constructed curves of constant width either have corners, such as the Reuleaux polygon, or have better smoothness derived from outer parallel lines, but the derivative of which is not smooth again. In addition, there are also some curves of constant width that can be infinitely differentiated, whereas, after several derivatives the resulting equations no longer represent curves of constant width.
Accordingly, it is natural to propose the following hypothesis.
Hypothesis 1.
For a smooth curve Γ of constant width, if its parametric equation is still a smooth curve of constant width after any number of derivatives, then the curve Γ must be a circle.
3. The Proof of the Hypothesis
Assume that the width of the smooth curve is d, namely,
which is equivalent to
After differentiating both sides of (7) with respect to , one has
which stands for a neutral delay differential equation.
Setting , and then substituting it into (8) gives the following characteristic equation
which yields
When , we obtain . In this case, is a circle of radius . When , it is obvious that cannot be a real number. Accordingly, when setting and substituting it into (10), one has
Furthermore, we obtain
Therefore, the general solution of (8) is expressed as
It follows from (15) and (16) that
where with constants being decided by the initial condition, is an angle, and its value can be derived from or . By using Lemma 1, we see that the smooth curve is a closed convex curve, if and only if
For simplicity, we assume that the support function is
Equation (20) can be rewritten as
In what follows, we would like to discuss the curves described by (21) in different values of . From (14), we see that . Therefore, we will analyze the two cases of and , respectively. When , (21) becomes
which implies that the curve is a circle.
From (23), we see that, when n is large enough, the term containing plays a predominant role in the parametric equation. In this case, (23) can be approximated to the following equation
System (24) comprises a circle of radius , and this circle goes around times when . As a result, when n is large enough, the trajectory of system (24) is no longer a simple closed curve.
From the above analysis, we see that is still a smooth curve of constant width after taking any times of derivatives, if and only if . This proves the hypothesis.
Remark 1.
Although different non-circular smooth curves of constant width have been constructed in the literature, the obtained curves after taking any number of derivatives have not been further studied. From the proof procedure shown above, it can be seen that a non-circular curve of constant width is no longer a simple closed curve after taking enough derivatives, although it can be taking any number of derivatives. However, even though it does not represent a simple closed curve after taking many times of derivatives, the resulting curve, after taking enough derivatives, can be approximated to a circle that has turned times.
4. Simulation Results
In this section, we will present some simulation results to illustrate the main result of this paper.
First, for the support function (19), we set When , in (20) represents a smooth curve of constant width, respectively, as can be seen in Figure 1a. However, for , since (18) is not satisfied, in (20) is not a simple closed convex curve according to Lemma 1, as depicted in Figure 1b.
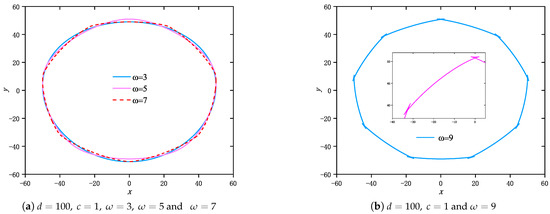
Figure 1.
Trajectory curves of (20) with different .
To further illustrate the proposed result, we set in (19) and take different derivative orders of (21). When the derivative order is less than 2, the curve after the corresponding derivative is still a curve of constant width, as shown in Figure 2a, as well as the blue line in Figure 2b. When the derivative order is equal to 3, the curve is no longer convex, as depicted in the purple line in Figure 2b. Moreover, if the derivative order is increasing, the obtained curve is able to intersect itself, and it is no longer a simple closed curve, as shown in Figure 3a. When the derivative order is continuously increased, the resulting curve is approximated to (24). Namely, the curve is a circle of radius that has turned four times, as shown in Figure 3b. In addition, when the derivative order is large enough, the four circles will overlap into one circle.
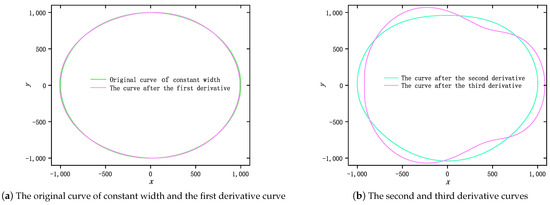
Figure 2.
Trajectory curves with different number of derivatives ().
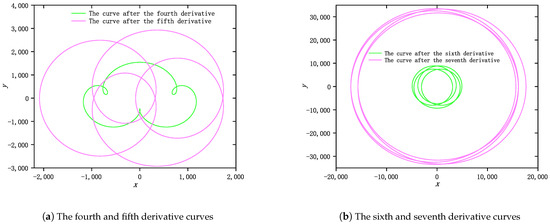
Figure 3.
Trajectory curves with different number of derivatives ().
5. Conclusions
This paper innovatively introduces the characteristic equation of a time delay system to analyze the smooth curve of constant width. We can construct a smooth non-circular curve of constant width on the basis of the above analysis. We also prove that there is no smooth non-circular curve of constant width, which is still a curve of constant width after taking any number of derivatives.
Author Contributions
Conceptualization, T.F. and Y.Z.; methodology, T.F.; software, T.F.; validation, T.F.; formal analysis, Y.Z.; investigation, T.F.; resources, Y.Z.; data curation, T.F.; writing—original draft preparation, T.F.; writing—review and editing, T.F. and Y.Z.; visualization, T.F.; supervision, Y.Z.; project administration, Y.Z.; funding acquisition, Y.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by Cultivation Project of Guizhou University ([2019]63), the Science and Technology Program of Guizhou Province ([2018]1047), Research Foundation for Talents of Guizhou University ([2017]61) and the fund project of Key Laboratory of Advanced Manufacturing technology, Ministry of Education, Guizhou University (KY[2018]478).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare that they have no conflict of interest. The funders had no role in the design of the study; in the collection, analysis, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Moon, Y.; Kota, S. Automated synthesis of mechanisms using dual-vector algebra. Mech. Mach. Theory 2002, 37, 143–166. [Google Scholar] [CrossRef]
- Martini, H.; Mustafaev, Z. A new construction of curves of constant width. Comput. Aided Geom. Des. 2008, 25, 751–755. [Google Scholar] [CrossRef]
- Borovikova, M.; Ibragimov, Z. Convex bodies of constant width and the Apollonian metric. Bull. Public Health Soc. 2008, 31, 117–128. [Google Scholar]
- Groemer, H.; Wallen, L.J. A measure of asymmetry for domains of constant width. Beitr. Algebra Geom. 2001, 42, 517–521. [Google Scholar]
- Rabinowitz, S. A polynomial curve of constant width. Mo. J. Math. Sci. 1997, 9, 3–27. [Google Scholar] [CrossRef]
- Paciotti, L. Curves of constant width and their shadows. Whitman Sr. Proj. 2010, 2010, 20. [Google Scholar]
- Xu, W.X.; Zhou, J.Z.; Chen, F.W. A kind of constant width “isosceles trapezoid”. Sci. China Math. 2011, 41, 855–860. [Google Scholar]
- Yang, Y. A Convex Set of Constant Width with an Opposite Top Sector; Wuhan University of Science and Technology: Wuhan, China, 2015. [Google Scholar]
- Mozgawa, W. Mellish theorem for generalized constant width curves. Aequ. Math. 2015, 89, 1095–1105. [Google Scholar] [CrossRef][Green Version]
- Mellish, A.P. Notes on differential geometry. Ann. Math. 1931, 32, 181–190. [Google Scholar] [CrossRef]
- Resnikoff, H.L. On curves and surfaces of constant width. arXiv 2015, arXiv:1504.06733. [Google Scholar]
- Kupitz, Y.; Martini, H.; Wegner, B. A linear-time construction of reuleaux polygons. Beitr. Algebra Geom. 1996, 37, 415–427. [Google Scholar]
- Pan, S.L. An application of tangential polar coordinates. J. East China Norm. Univ. Nat. Sci. 2003, 1, 13–16. [Google Scholar]
- Martini, H.; Montejano, L.; Oliveros, D. Sections of bodies of constant width. In Bodies of Constant Width; Birkhäuser: Cham, Switzerland, 2019. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).