1. Introduction
Throughout this paper, we denote by
(
resp.) the set of integers (
resp. natural numbers), and let
be the
n times Cartesian product of
,
. Besides, let
(
resp.) be the set of odd (
resp. even) natural numbers. Motivated by the study of fixed point sets in [
1], we are currently interested in the set of fixed point sets of a digital image
[
2,
3,
4] because it can be applied in the fields of applied sciences and robotics [
5].
Given a digital image (or digital object)
, the authors of [
2] explored some features of fixed point sets of
k-continuous self-maps of it. The works in [
3,
4] further studied this topic to obtain many results. However, there are still many unsolved problems related to this work. To be precise, given a digital image
, let
be the set
. Besides, let us recall that [
2,
4]
where
” is used for introducing a new terminology or a notation. We denote by
an alignment of fixed point sets of
(for more details see Definition 2).
Given a simple closed
k-curve with
l elements in
, denoted by
, it turns out that
is perfect if and only if
is
k-contractible, i.e.,
[
3,
4]. Besides, only for the case
or
, the study of
was recently done [
4]. However, in the cases
and
, and
, the study of
remains open, as follows.
(Q1) Given two simple closed k-curves and , where and , how can we formulate ?
(Q2) Unlike the hypothesis of (Q1), given , how can we formulate ?
With the hypothesis of , , or ”, the following queries are raised.
(Q3) How many 2-components are there in ?
(Q4) Are there some relationships among the numbers , and the perfectness of ?
(Q5) Given a simple k-path with d as the length of it, what conditions make perfect ?
(Q6) How can we characterize ?
After addressing these queries, we will adapt these kinds of approaches into the study of fixed point sets of some digital
k-surfaces in
[
6,
7,
8,
9,
10,
11,
12]. Let
be a digital
k-surface in
, and
be a digital wedge of
. In particular, we denote a minimal simple closed 18-surface consisting of ten (
resp. six) elements in
by
(
resp. ) [
10,
11] (see also
Section 6). Then, the following issues are naturally raised.
(Q7) Given a digital k-surface , how can we formulate and ?
(Q8) For a digital k-surface , how many 2-components are there in ?
(Q9) Under what conditions are , , and perfect ?
Using many new tools, we shall address all of these issues.
The remaining part of the paper is organized as follows.
Section 2 recalls some notions and backgrounds needed for this study. Besides, it refers to some properties of digital continuity.
Section 3 initially formulates
with a certain hypothesis, where
, and explores a certain condition which makes it perfect.
Section 4 investigates the number of the 2-components of
, where
. Besides, after joining a simple
k-path
onto
to produce a digital wedge
, we investigate a certain condition that makes
perfect. Finally, we investigate certain conditions that make
perfect.
Section 5 investigate some properties of
, where
. In addition, we also deal with
with a certain hypothesis (see the property (4)).
Section 6 develops several types of fixed point theorems for digital
k-surfaces. Namely, for some digital
k-surfaces
and
, we formulate
and
and investigate some properties of them. Eventually, we shall address the issues (Q7)-(Q9).
Section 7 concludes the paper. In addition, we will denote the cardinality of a set
X with
.
2. Digital Wedges and Some Properties of the Digital Continuity
As an initial version of a digital image, a pair
was called a
digital image, where
and the
k-adjacency of
was assumed in
[
13,
14,
15]. After then, the work in [
16] first generalized this approach into the high-dimensional digital image
with one of the
k-adjacency relations of
. To study
in a digital topological setting,
, the following digital
k-adjacency (or digital
k-connectivity) was taken in [
16] (see also in [
17]), as follows.
For a natural number
t,
, the two distinct points
are
-adjacent if at most
t of their coordinates differ by
and the others coincide. According to this statement, the
-adjacency relations of
, are formulated [
16] (see also in [
17]) as follows,
Hereafter,
is assumed in
, with one of the
k-adjacency of (1). Besides, these
k-adjacency relations are strongly used in calculating digital
k-fundamental groups of digital products [
16,
18]. Indeed, a digital image
is one of digital spaces [
19] (see also in [
11]). For
with
, the set
with 2-adjacency is called a digital interval [
13,
20].
The following terminology and notions [
11,
13,
14,
15,
16,
20,
21] will be also used later. Given
with
, by a
k-path with
elements in
X we mean the sequence
such that
and
are
k-adjacent if
[
13]. We say that
is
k-connected if for any distinct points
there is a
k-path
in
X such that
and
[
13,
20] (for more details see in [
11]). Given
, by the
k-component of
, we mean the maximal
k-connected subset of
containing the point
x [
13].
By a simple
k-path from
x to
y in
, we mean a finite set
such that
and
are
k-adjacent if and only if
, where
and
[
13]. Then, the length of this set
is denoted by
.
By a simple closed
k-curve (or simple
k-cycle) with
l elements in
, denoted by
[
13,
16],
, we mean a set
such that
and
are
k-adjacent if and only if
. Then, the number
l of
depends on both the dimension
n of
and the
k-adjacency (for details, see the property (2) below). Hereafter, we use the notation
to abbreviate
.
As to the number
l of
, according to the
k-adjacency of
in (1), some properties of the number
l of
, are obtained, as follows [
4].
This is an improved version of (2) in [
4] because there is a misprint at the fourth line of (2) in [
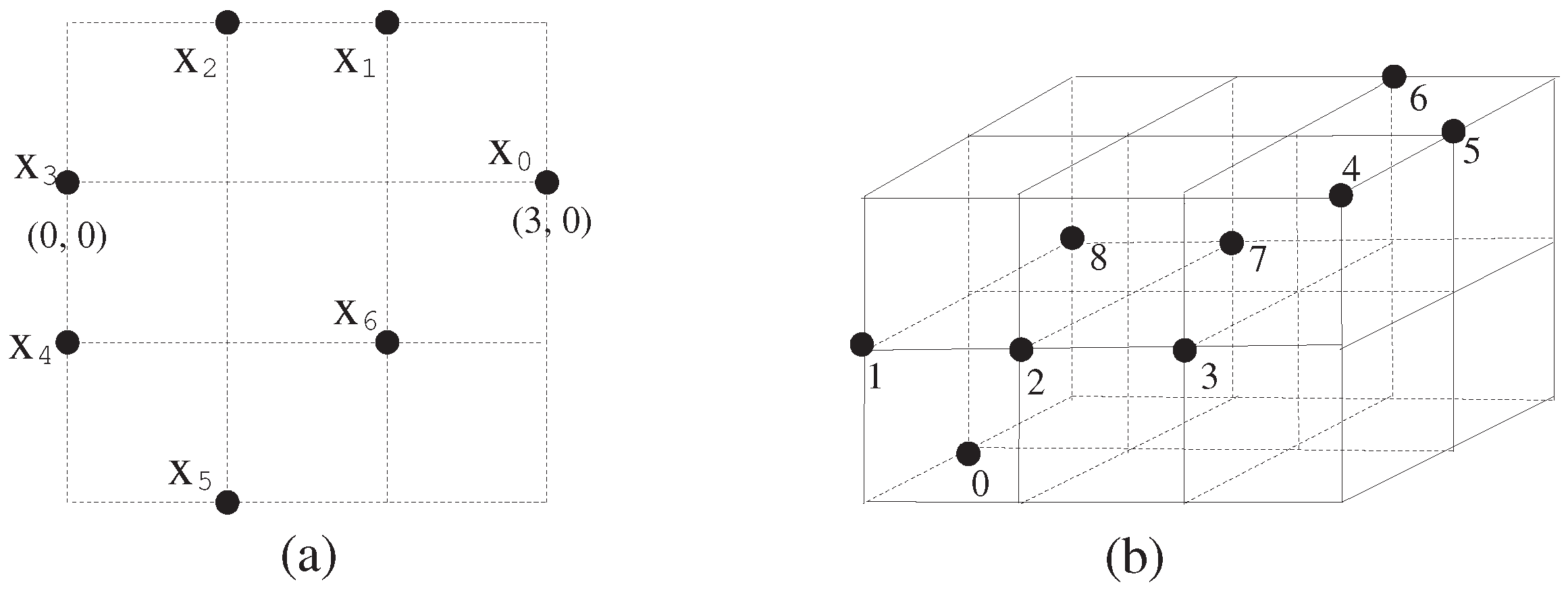
4]. For the cases of (3)–(4) of (2),
and
are considered (see
Figure 1). Hereafter, in terms of the number
l of
, we will follow the property (2).
As the notion of neighborhood plays an important role in digital topology and digital geometry, a digital
k-neighborhood of a point
p of a digital image
was established, as follows. Given
and a point
, the following notion of ‘digital
k-neighborhood of
p with radius 1’ is defined, as follows [
16].
By using the notion of (3), the digital
-continuity of a map
in [
15] was represented, as follows [
10,
16].
Proposition 1 ([
10,
16]).
A function is (digitally) -continuous if and only if for every , . In Proposition 1, in the case , the map f is called a “k-continuous” map to abbreviate the -continuity of the given map f. In some literature, as there is some confusion of the digital k-continuity of a map between digital images, we need to attention the following.
Theorem 1. Given a set , let us consider the two digital connectivities of X such as and with (see the property of (1)). Naively, assume the two digital images and . Further consider a -continuous self-map of and a -continuous self-map of . Then, neither of them implies the other.
Proof. Using Proposition 1, we prove the assertion. First, we prove that the
-continuity of a self-map of
need not imply the
-continuity of a self-map of
with the following counterexample. Let us consider the self-map of
such as
(see
Figure 2a) such that
. While the map
is obviously a 26-continuous map, it is neither 18- nor 6-continuous at the point
because
where
.
Similarly, taking a certain example similar to the map above, we can clearly prove that for a certain digital image an 18-continuous map need not imply a 6-continuous map at a certain point .
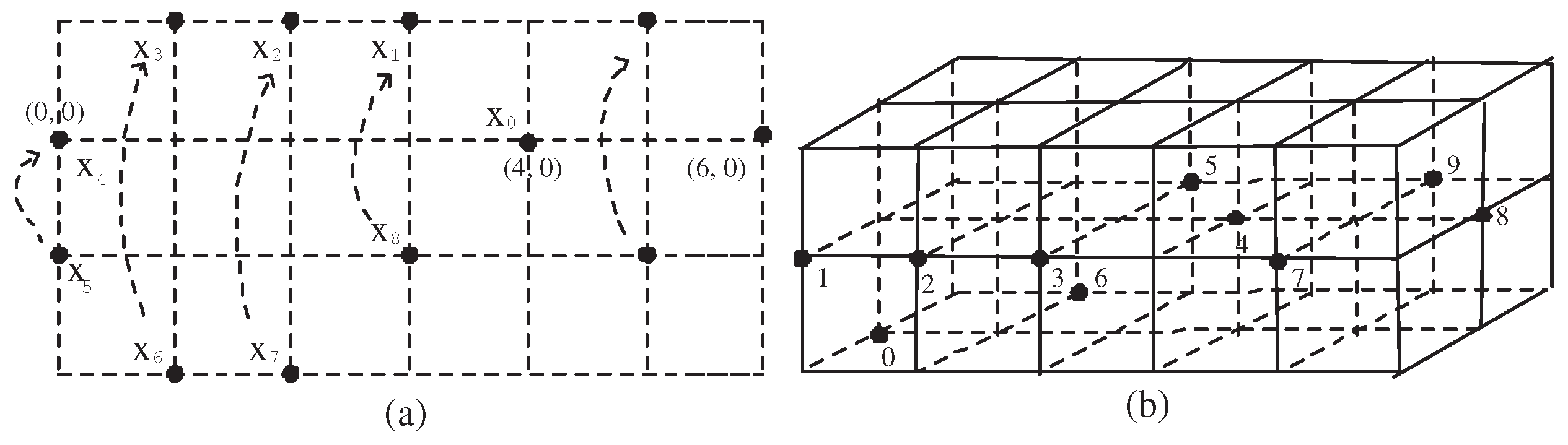
Conversely, we prove that the
-continuity of a self-map of
need not imply the
-continuity of a self-map of
with the following counterexample. Let us consider the self-map of
such as
(see
Figure 2b) such that
While the map
is a 6-continuous map, it is neither 18- nor 26-continuous at the point
because
and similarly we obtain
where
.
As another example, let us consider the self-map of
such as
(see
Figure 2c) such that
While the map
is an 18-continuous map, it is not 26-continuous at the point
because
where
. □
In view of Theorem 1, we observe that not every -continuous self-map of implies a -continuous self-map of if . Namely, we observe that a -continuous self-map of is different from a -continuous self-map of if .
Using the digital continuity of maps between two digital images, let us recall the category
DTC consisting of the following two pieces of data [
16], called the “digital topological category”, as follows.
The set of , where , as objects of DTC denoted by ;
For every ordered pair of objects , the set of all -continuous maps between them as morphisms of DTC, denoted by .
In
DTC, for the case
, we will use the notation
DTC(k) [
18].
To compare digital images
[
22] up to similarity, we often use the notion of
-isomorphism (or
k-isomorphism) as in [
22]), as follows.
Definition 1 ([
22]).
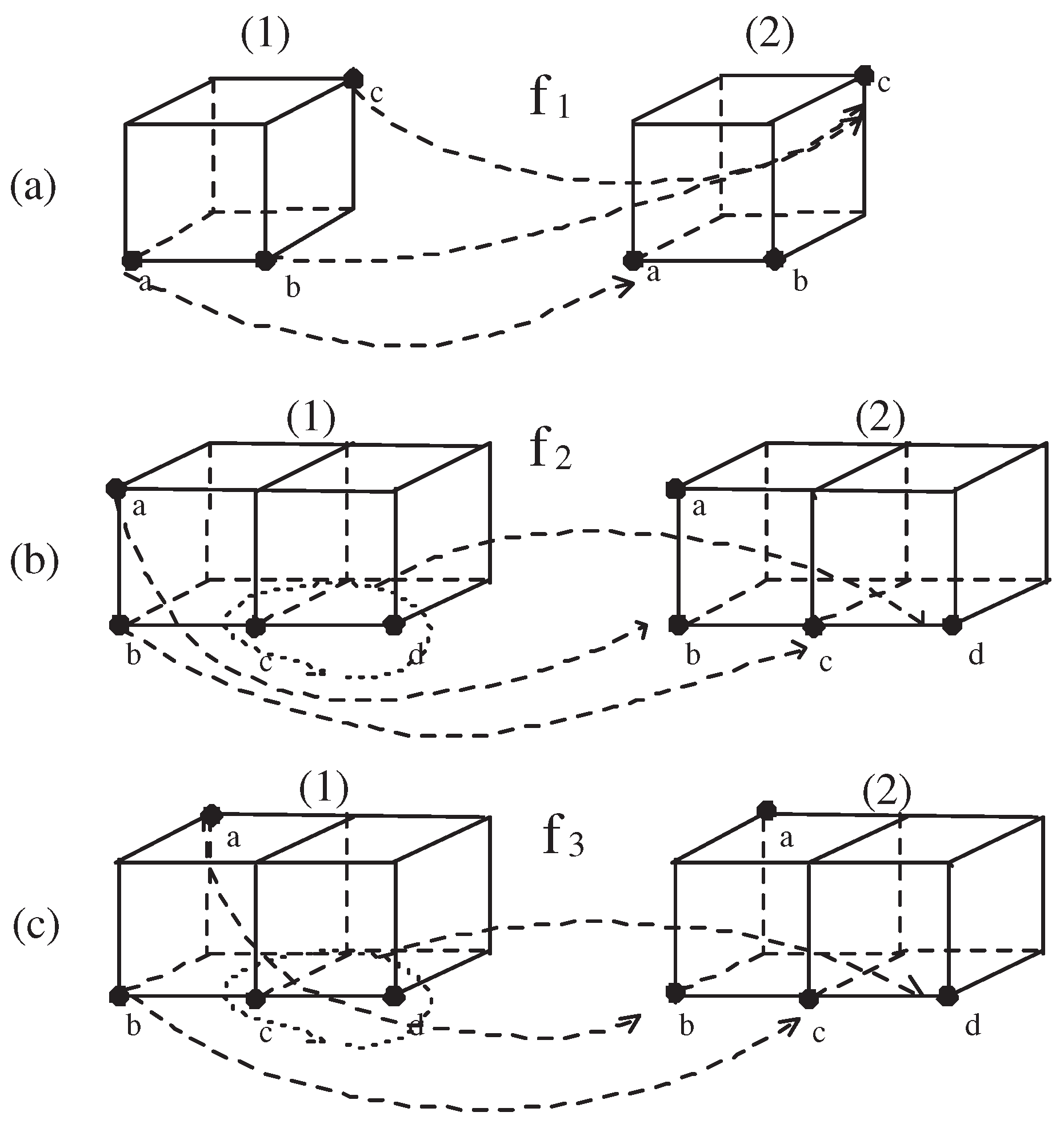
(-homeomorphism in [23]) Consider two digital images and in and , respectively. Then, a map is called a -isomorphism if h is a -continuous bijection and further, is -continuous. Then, we use the notation . In the case , the map h is called a k-isomorphism. Let us now recall the notions of a digital wedge which can be used in studying fixed point sets from the viewpoint of digital geometry. Given two digital images
and
, a
digital wedge of them, denoted by
, is initially defined [
16,
18] as the union of the digital images
and
(for more details see
Figure 3a), where
- (1)
is a singleton, say ;
- (2)
and
are not
k-adjacent, where two sets
and
are said to be
k-adjacent if
and there are at least two points
and
such that
a is
k-adjacent to
b [
20]; and
- (3)
is k-isomorphic to and is k-isomorphic to (see Definition 1).
In view of this feature, we may consider
to be
. When studying digital wedges in a digital topological setting, we are strongly required to follow this approach. Indeed, this digital wedge is quite different from the classical one point union (or wedge) in typical topology [
24] and standard graph theory [
25] by the
k-adjacency referred to in (2) above. Based on the property (2), given
such that
and
, we observe the following properties.
In the case , depending on the numbers t and n of , we can take or . Hereafter, as to , of , we will follow the property of (4). In relation to (4), we may similarly consider the cases and because is k-isomorphic to .
3. Formulation of and Its Digital Topological Properties
This section explores some conditions that make an alignment of fixed point sets of a digital image 2-connected (or perfect) in a
setting. As some reasons why we take the notation of
were referred to in [
4], the usage of the notation
indeed has some advantages of highlighting the set of
k-continuous self-maps of
, as follows,
where
. Then, using the set in (5), we define the following:
Definition 2 ([
3]).
Given , is said to be an alignment of fixed point sets of . In Definition 2, we called an alignment of fixed point sets to abbreviate the term “alignment of cardinalities of fixed point sets of all k-continuous self-map of ”. Besides, we remind that the pair is assumed to be a digital image with 2-adjacency as a subset of .
Definition 3 ([
3]).
Given , if , then (or for brevity) is said to be perfect. As usual, we say that a digital topological property is a property of a digital image which is invariant under digital k-isomorphisms.
Theorem 2 ([
2,
3]).
In , is a digital topological property. Regarding Theorem 2, for
while the papers [
2,
3] only consider the case
, a recent paper [
4] studied
without any limitations of
l, i.e.,
or
(for more details see the property (2)). Besides, the digital topological property referred to in Theorem 2 also holds even for the case of
,
.
For , having in mind the property of (2), we obviously obtain the following.
Lemma 1. (1) Given of , [2]. (2) For of and , [4]. (3) , where .
In view of Lemma 1, for
without any limitation of
l of
related to the choice of odd or even number, it is clear that [
4,
26]
because in the case
, we take
, and in the case
, we can consider
depending on the numbers
t and
n of
(see the property (2) and Lemma 1(3)).
Remark 1. In Lemma 1, while is independent from the k-adjacency, it only depends on the number l of .
For
, the paper [
3] already proved the following.
Let us now investigate some properties of for the case of an odd number l of , which remains open. After recalling the property of (4), by Lemma 1(2), we obtain the following.
Theorem 3. For and ,
Proof. With the given hypothesis, to characterize , although there are many kinds of k-continuous self-maps of , it suffices to consider certain maps fulfilling the properties.
- (a)
; or
- (b)
; or
- (c)
and ; or
- (d)
f does not support any fixed point of .
First, from (a) and Lemma 1(2), we obtain
More precisely, from the condition (a), we obtain and further, owing to the self-map of f associated with the other part of , we obtain . Thus, considering both these two steps, we finally obtain the set in (7).
Second, from (b), using the method similar to the process of (7), we have
Third, from (c) and (d), using the method similar to the process of (7), we have
After comparing the following three numbers,
l of (8),
of (7), and
of (9), with the hypothesis, as
, from (7) and (9), we always obtain
Thus, by (7), (8), (9), and (10), we obtain . □
Corollary 1. For and , is perfect if and only if .
Proof. Based on Theorem 3, count on the difference between
and
l, i.e.,
In view of (11), if , for , we obtain the following: is perfect if and only if . □
Example 1. As shown in Figure 3a, we obtain the following. - (a)
.
Similarly, we obtain the following (see Figure 3a,b). - (b)
(see Figure 3a). - (c)
(see Figure 3b).
With the property of (4), to make Theorem 3 and Corollary 1 useful, we remark the following.
Remark 2. which is perfect. For instance, .
The authors of [
3] proved that
. As no
exists, if
and
,
and
. With the property (4), given
and
, we obtain the following.
Remark 3. For any and , we obtain .
Proof. With the hypothesis, we will prove the assertion with two cases, as follows:
(Case 1) Using the property of (6), we obtain
(Case 2) By Theorem 3, we obtain
Owing to the sets of (12) and (13), the proof is completed. □
Given a digital image
with
, we need to check if there is the number
. Indeed, the authors of [
2] studied this property with the following lemma (see Lemma 4.8 of [
2]). The following lemma also holds for the case of
as stated in Example 1 which is an improvement of Lemma 4.8 of [
2].
Lemma 2 ([
2]).
Let be k-connected with . Then, if and only if there are distinct points with . By Lemma 1, it is clear that
is perfect if and only if
[
3,
4]. In relation to Lemma 1, we obtain the following result which can play an important role in exploring the perfectness of
. When investigating the perfectness of a given digital image, we can use the following.
Theorem 4 ([
4]).
Let be k-connected and . Assume there are three or four distinct points such that , and furtherThen, .
Given , i.e., , motivated by Lemma 1, Remarks 2 and 3, and Theorem 3, we obtain the following.
Theorem 5. Given , we obtain the following.
- (1)
In the case is perfect if and only if [3]. - (2)
In the case , is perfect if and only if .
- (3)
In the case , is perfect if and only if .
- (4)
In the case , is perfect if and only if .
Before proving the assertion, we need to recall the properties in (2) and (4).
Proof. (1) In the case
, by Lemma 1(1), we complete the proof (see also [
3]).
(2)–(4) Based on the properties (2) and (4), by Lemma 1, Remarks 2 and 3, and Theorem 3, the proofs are completed. □
4. Alignments of Fixed Point Sets of
Given two
and
, it is clear that
is
k-isomorphic to
. As mentioned in the previous part, when studying
, we always have in mind the properties of (2) and (4). By Theorem 2, it is obvious that
. In the case
with
, or
, the study of
was already done in [
3,
4]. Besides, in the case
and
, the study of
was also already done in Theorem 3 and Remark 1. Thus, with the properties of (2) and (4), in the case
(see Theorem 6 and Remark 5) and
, the study of
remains open. Therefore, this section addresses this issue. As a generalized version of
in Theorem 3, we obtain the following.
Theorem 6. Assume , such that and . .
Proof. For convenience, let
,
. With the given hypothesis, to characterize
, though we can consider many types of
k-continuous self-map
f of
, motivated by the approach of Theorem 3, it is sufficient to consider the maps
with the following four cases.
First, according to (15)(1), by Lemma 1(2), we have
Second, according to (15)(2), by Lemma 1(1), we obtain
Third, according to (15)(3) and (4), by Lemma 1, we have
Therefore, we need to count on the above five numbers in (16), (17), and (18), say
Then, owing to the hypothesis
and the quantities of (19), we obviously obtain
which implies that from (16), (17), and (20)
Then, we further need to count on the two gaps between the two numbers in each of (a) and (b) of (22) below
In view of (20), (21), and (22), we obtain
□
To support Theorem 6, with the property (4), we give the next example, .
Example 2.
- (1)
.
- (2)
.
- (3)
.
Comparing Examples 2(1) and (3), we observe that while has two 2-components and has three 2-components.
Thus, we observe the following.
Remark 4. With (20), (21), and (23), with the hypothesis of Theorem 6, take the difference between and , i.e., Then, we always have because .
However, let us consider the difference between and , i.e., the quantity Then, the number of (25) can invoke 2-disconnectedness of depending on the situation because not every is always greater than or equal to 2 (two).
Motivated by Remark 4, we obtain the following.
Theorem 7. In Theorem 6, we obtain the following.
- (1)
has three 2-components if and only if .
- (2)
has two 2-components if and only if .
Proof. Using the formula referred to in (23), let us point out the difference as mentioned in (24)
Indeed, this quantity
plays an important role in finding some elements that make the set
2-disconnected around the element
. Indeed, owing to the hypothesis of
, there is certainly a nonempty set
C around the number
(see also Lemma 2), where
Next, we are also required to further check the difference between the two numbers in (22)(a) as referred to in (25), i.e.,
As mentioned in Remark 4, in the case
this quantity
does not invoke the 2-disconnectedness of
around the element
.
However, in the case
there is a certain non-empty subset of
, which leads to 2-disconnectedness of
around the element
. More precisely, in the case
in (26), there is certainly a set
D, where
such that
Unlike the set , the existence of the set depends on the situation according to the number in (25)(see Remark 4 and (26)). Furthermore, in the case , the set D makes 2-disconnected around the number (see (23)).
Indeed, the quantities of both of (24) and of (25) also determine the sizes of 2-disconnected parts of around the numbers and (see (23)). □
To support our results, motivated by Example 2, we give the next example.
Example 3. (1) has two 2-components.
(2) has three 2-components.
Corollary 2. (1) For , we obtain Thus, in the case , has one 2-component, i.e., .
(2) If , then we obtain , where .
Remark 5. For , .
Remark 6. In view of Theorems 6 and 7, digital topological properties of of Theorem 6 only depends on the numbers and instead of the k-adjacency.
Regarding (Q5)–(Q6), using the two quantities of (24) and (25), we obtain the following.
Theorem 8. With the hypothesis of Theorem 6, is perfect if , where and d is the length of a simple k-path .
Proof. Based on the numbers
from (24) and (25), respectively, take the number
If , then the part with the length d added on makes the set in (23) 2-connected (see the processes from (15) to (22)). Thus, is perfect. □
Based on Example 3, by Theorem 8, we obtain the following.
Example 4. - (1)
which is perfect, where is a simple k-path with length 1 (one).
- (2)
which is perfect, where is a simple k-path with length 1 (one).
Theorem 9. For in Theorem 6, is perfect if , where of (28).
Proof. If , as , the part added on makes the set in (23) 2-connected by using the processes from (15) to (22), where . Thus, is perfect. □
Example 5.
- (1)
, which is perfect.
- (2)
.
5. Digital Topological Properties of Alignments of Fixed Point Sets of
As mentioned in (2), it turns out that no
exists,
. However,
exists. Unlike the case
stated in
Section 4, this section investigates some properties of alignments of fixed points of
in the case
, which remains open. In particular, we also deal with
for a certain
k-adjacency. Comparing to the obtained results in
Section 4, this section focuses on finding some new results on
with the hypothesis, as follows.
Theorem 10. Assume , such that and . .
Before proving this assertion, we can observe some difference between Theorems 6 and 10. Besides, Lemma 1(2) is strongly used in proving this assertion.
Proof. For convenience, let
and
. With the given hypothesis, to characterize
, though we can consider many types of
k-continuous self-maps
f of
, motivated by the approach of Theorem 6, it is sufficient to consider the maps
with the following four cases.
First, according to (29)(1), by Lemma 1(2), we obtain
Second, in view of (29)(2), by Lemma 1(2), we have
Third, according to (31)(3) and (4), by Lemma 1(2), we obtain
Therefore, we need to count on the five numbers in (30), (31), and (32), say
Then, owing to the hypothesis
and the quantities of (33), we obviously obtain
which implies that from (30), (31), and (34)
Then, we need to further count on the two gaps between the two numbers in each of (a) and (b) of (36) below
In view of (34), (35), and (36), we obtain that
□
Example 6.
- (1)
.
- (2)
.
- (3)
.
Remark 7. With (34), (35), (37), and the hypothesis of Theorem 10, take the difference between and , i.e., Then, we always have because .
However, let us consider the difference between and , i.e., the quantity Then, the number of (39) can invoke 2-disconnectedness of depending on the situation because not every is always greater than or equal to 2 (two).
Unlike the case of Example 6(1), in Example 6(3) we observe that has three 2-components. This feature is due to the difference between and . Motivated by Remark 7, we obtain the following.
Theorem 11. In Theorem 10, we obtain the following.
- (1)
has three 2-components if and only if .
- (2)
has two 2-components if and only if .
Proof. From (37), as stated in (38), let us point out the difference as referred to in (38)
Indeed, this quantity
plays an important role in finding some elements that make the set
2-disconnected around the element
. Indeed, owing to the hypothesis of
, there is certainly a nonempty set
C around the number
, where
Next, we are also required to further count on the difference between the two numbers in (39)(a), i.e.,
in (39). As mentioned in Remark 7, in the case
this quantity
does not invoke 2-disconnectedness of
around the element
.
However, in the case
there is a certain non-empty subset of
, which leads to 2-disconnectedness of
around the element
. More precisely, in the case
in (40), there is certainly a set
D, where
such that
Unlike the existence of the set C, the existence of the set D depends on the situation according to the difference (see Remark 7 and (40)). Furthermore, in the case , the set D makes 2-disconnected around the number . Indeed, the quantities of both of (38) and of (39) also determine the sizes of 2-disconnected parts of around the numbers and (see (37)). □
In view of Theorem 11, we observe that of Theorem 10 has at most three 2-components. To support our result, we give the next example.
Example 7. For the case of l with the property (4), we obtain the following.
- (1)
has two 2-components.
- (2)
has two 2-components.
- (3)
has three 2-components.
Remark 8. In view of Theorems 10 and 11, digital topological properties of in Theorem 10 only depends on the numbers and instead of the k-adjacency.
Using the method used in Theorem 10, let us explore for the case of . After recalling the properties (2) and (4), we obtain the following.
Remark 9.
- (1)
.
- (2)
Given , , we obtain , which is not perfect.
Regarding (Q5)–(Q6), using a method similar to the proof of Theorem 8, we obtain the following.
Theorem 12. For in Theorem 10, is perfect if , where and d is the length of a simple k-path .
Proof. Based on the numbers
from (38) and (39) respectively, take the number
If , then is perfect. □
In view of Example 6, we obtain the following:
Example 8.
- (1)
, where is a simple k-path with length 2.
- (2)
, where is a simple k-path with length 3.
Using a method similar to the proof of Theorem 9, we obtain the following.
Theorem 13. For in Theorem 10, is perfect if , where of (42).
Proof. As has , if , then is perfect, where . □
Example 9. .
(2) .
6. Digital Topological Properties of Alignments of Digital -Surfaces
Several types of minimal simple closed
k-surfaces in
, e.g.,
,
,
and
[
10,
11], play important roles in the fields of digital surface theory, fixed point theory, digital homotopy one [
10,
11], and so on. Thus, this section is devoted to exploring some properties of alignments of fixed point sets of some digital
k-surfaces and digital wedges of them. In particular, we calculate
,
, and
This approach is motivated by the typical and standard digital
k-surfaces introduced in the papers [
7,
8,
9,
12,
27]. With this approach, first of all, we will intensively explore the alignments of fixed point sets of these digital surfaces. Up to now, the study of fixed point sets of
k-digital surfaces was partially preceded in several papers including the papers [
11].
Definition 4 - (1)
is 6-isomorphic to , where , i.e., , where (see Figure 4a). - (2)
, where (see Figure 5b(1)), d is the Euclidean distance in . - (3)
(see Figure 5a(1)), where [10,11], , and . - (4)
.
Remark 10 - (1)
is not 6-contractible.
- (2)
and are considered in the digital pictures and , respectively. Besides, each of them is 18-contractible.
- (3)
is 26-contractible [10,11] and is a minimal simple closed 26-surface (see Figure 5b(1)).
Indeed, each
and
are 18-contractible [
10,
11]. In addition, we see that
is simply 6-connected [
10].
When studying
,
, we should assume
,
in the binary digital picture such as
, where
and
are assumed. For instance,
Finally, we assume the following
,
,
, and
[
11].
Let us now investigate the number of 2-components of .
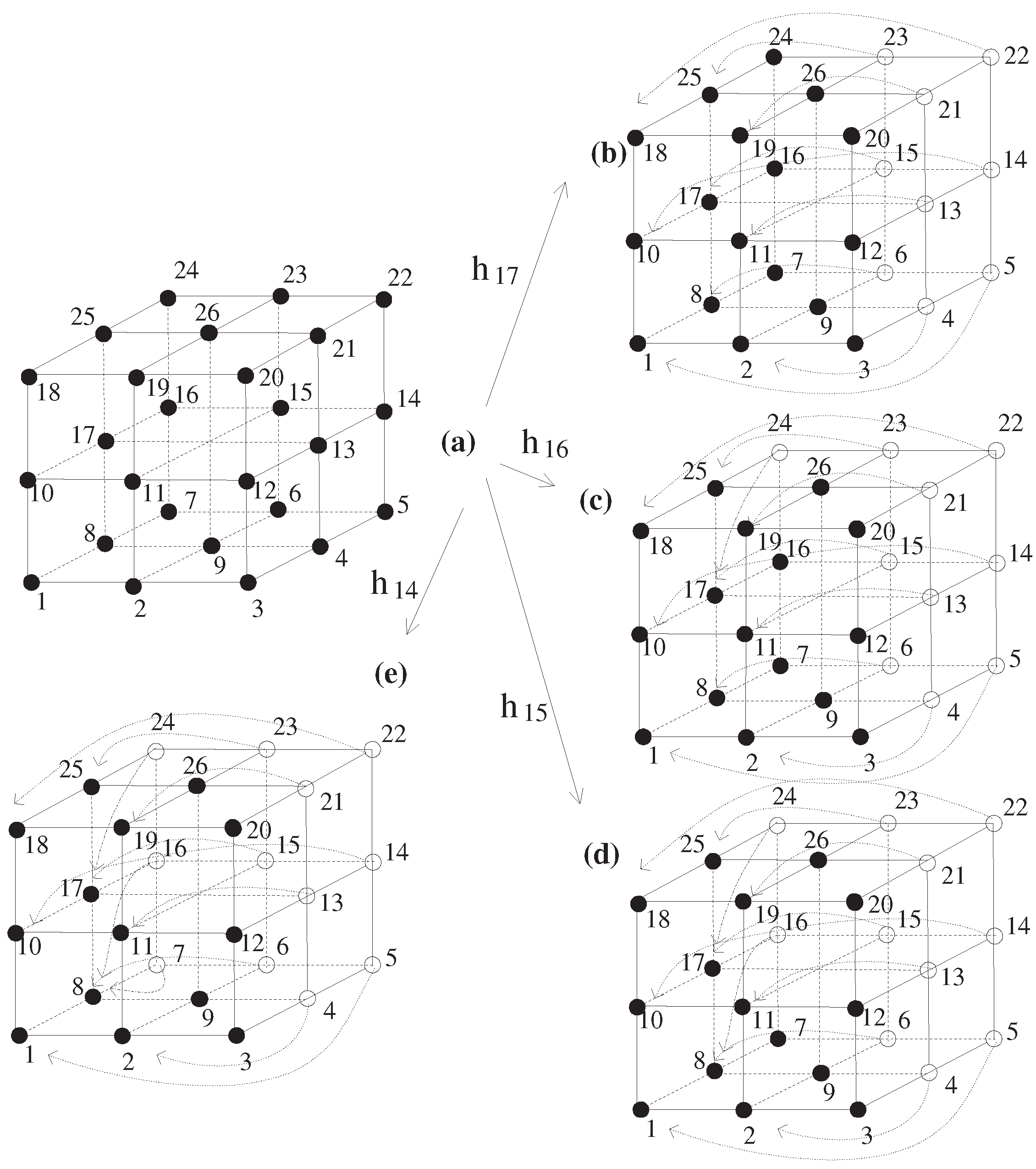
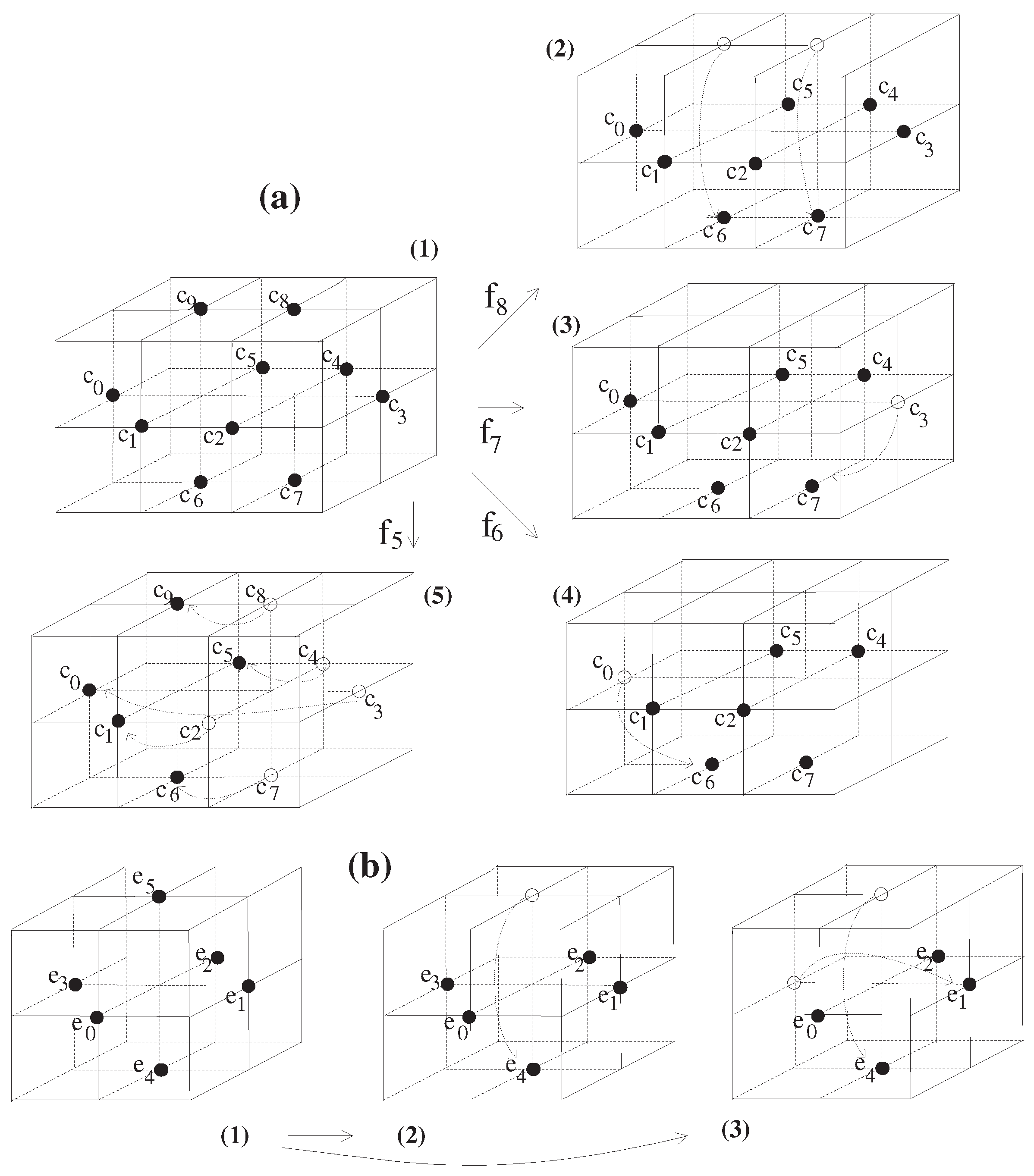
Theorem 14. is not perfect, i.e., , which has two 2-components.
Proof. Let
in
Figure 4 (for convenience,
is described by using the number
). Further consider a 6-continuous self-map
f such that
(see the map described in
Figure 4((a) → (b)). In view of Proposition 1, we observe that there is no
such that
. However, there are many 6-continuous self-maps
of
such that
, where
. To be precise, as shown in
Figure 4 (see (a) →(b)), consider the following 6-continuous self-map
of
such that
. To be specific,
Similarly, we also have 6-continuous self-maps
of
such that
such that
, as follows (see
in
Figure 4((a)→(c),
in
Figure 4((a)→(d),
in
Figure 4((a)→(e), and so on): To be specific,
Therefore, we obtain . □
Let us now recall the 18-contractibility of
and
(see also Theorem 6 and
Figure 2 of [
11]), as follows.
Lemma 3 ([
11]).
Each and are 18-contractible. Let us now examine if each of and is perfect, where .
Theorem 15. - (1)
is not perfect, i.e., , which has two 2-components.
- (2)
is perfect.
- (3)
is perfect.
Proof. (1) It is clear that
because there is no 18-continuous self-map
f of
(see
Figure 5a(1) and Lemma 2 and Theorem 4) such that
(see also Proposition 1). Naively, it is clear that there is no
such that
for a point
contrary to Proposition 1 so that there is no 18-continuous self-map
f of
such that
. However, there are many 18-continuous self-maps of
such that
and further,
.
To be specific, first, consider the 18-continuous self-map
of
in
Figure 5a such that
(see
Figure 5a (1) → (2)), i.e.,
Second, consider the 18-continuous self-map
of
in
Figure 6a such that
(see
Figure 5a (1) → (3)), i.e.,
Third, consider the 18-continuous self-map
of
in
Figure 5a such that
(see
Figure 5a (1) → (4)), i.e.,
Fourth, consider the 18-continuous self-map
of
in
Figure 5a such that
(see
Figure 5a(1) → (5)), i.e.,
Fifth, based on this map
, further consider the 18-continuous self-map
of
in
Figure 6a such that
, i.e.,
Similarly, motivated by the establishment of
, we obtain an 18-continuous self-map
of
in
Figure 5a satisfying
. Furthermore, as only a digital image with a singleton has the fixed point property [
11,
15,
26], it is clear that
. Based on these cases, we obtain
, which completes the proof.
(2) We prove the assertion using Theorem 4. First, consider the 18-continuous self-map
of
in
Figure 5b such that
, i.e.,
Second, motivate by the maps
in (1) above, we easily establish certain 18-continuous self-maps
of
in
Figure 5b(see (1) →(2) and (1) →(3)) such that
.
Finally, we obtain .
(3) Motivated by the proof of (2) above, using Theorem 4, we complete the proof. □
By Lemma 3 and Theorem 15(1), the following is obtained.
Remark 11. Although is 18-contractible, is not perfect
As proven in Theorem 15(1), though is not perfect, we obtain the following:
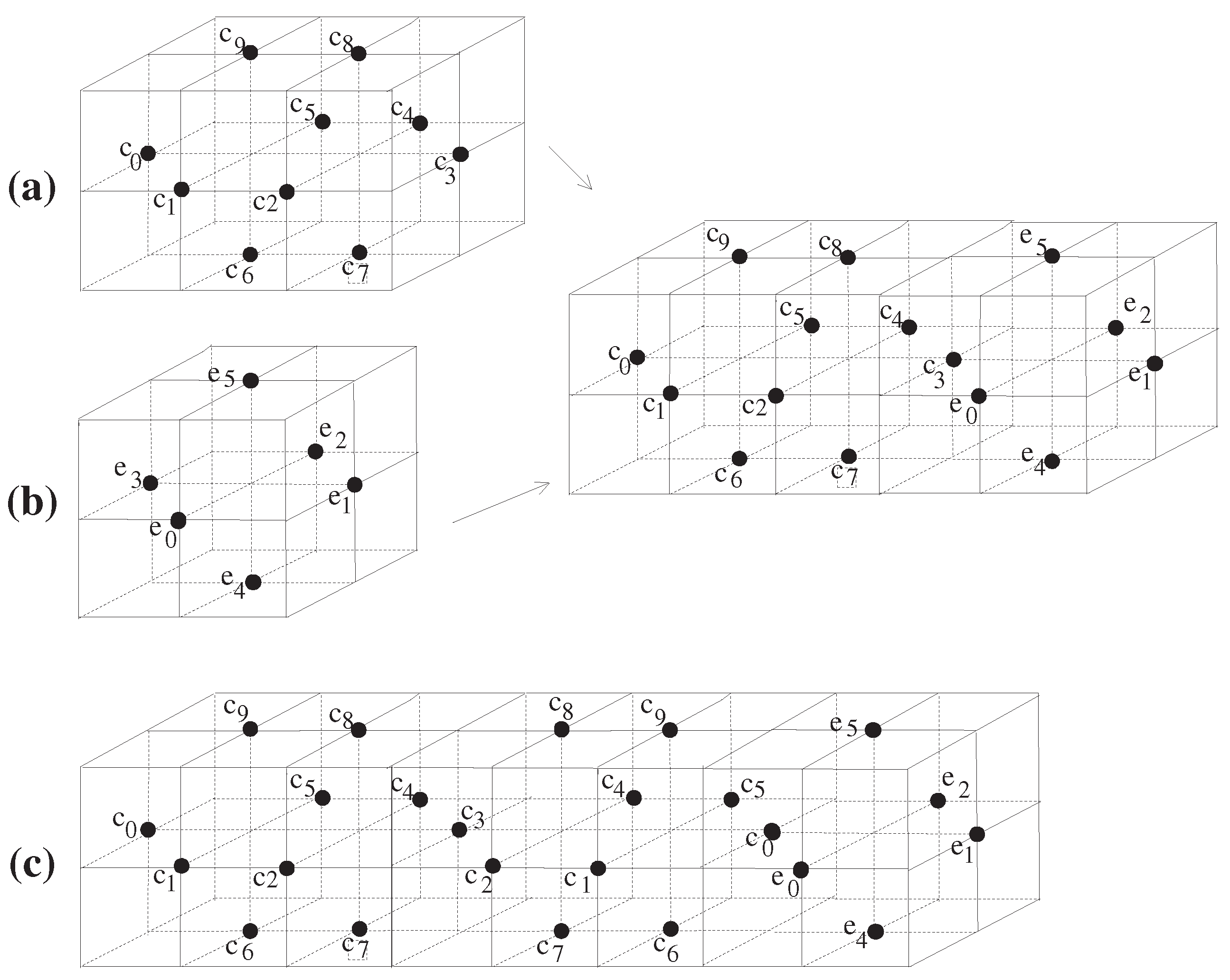
Theorem 16. is perfect.
Proof. Let
and
and
, i.e.,
(see
Figure 6a(1),b(1)). Regarding
, it is sufficient to consider the following 18-continuous self-maps of
such that
According to (44), we now investigate with the following four cases.
First, according to (44)(1), we obtain
Second, according to (44)(2), we have
Third, according to (44)(3), we obtain
Fourth, according to (44)(4), we obtain
Therefore, by these four quantities from (45), (46), (47), and (48) as subsets of
, we obtain
Owing to Theorem 16, it turns out that while is not perfect, is perfect. □
Theorem 17. is not perfect and has two 2-components.
Proof. Using a method similar to the approach of (44), we consider the following 18-continuous self-maps
f of
such that
From (49)(1), we obtain the following,
From (49)(2)–(3), and further, motivated by the map
of
Figure 5 we obtain the following,
In view of (50) and (51), by
Lemma 2, we obtain
which implies that
is not perfect because
. □
Corollary 3. is perfect.
Proof. From Theorem 17, as
after joining
onto
(see
Figure 6c), we produce the digital wedge
. Finally, by Theorem 4, we have
which is perfect. □
7. Conclusions
As conclusions, given
, we formulated
without any limitation of the numbers
, which are either odd or even. In one of the key works, we were able to explore some properties of several types of digital
k-surfaces motivated by the digital
k-surfaces [
8,
10,
11,
27] and study some properties of fixed point sets of them. Eventually, it turns out that there are non-perfectness of
and
and perfectness of
, which can be used in studying both fixed point theory in a
setting and digital geometry.
The study of a certain connection between fixed point sets of typical topological spaces
X in the
n-dimensional Euclidean space and those of the digitized space (or digital image) of
X plays an important role in both pure topology and digital topology. Based on the study of fixed point sets in the present paper, we can recognize the quantity of fixed points of a given digital object and classify digital objects because the alignment is a digital topological invariant. The obtained results in the
setting can be applied to the fields of chemistry, physics, computer sciences, and so on. In particular, this approach can be extremely useful in the fields of classifying molecular structures, computer graphics, image processing [
28], approximation theory, game theory, mathematical morphology [
29], fractal image compression [
30], digitization, robotics [
31], rough set theory, and so forth.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





