Abstract
In this paper, inertial neural networks are under investigation, that is, the second order differential equations. The recently introduced new type of motions, unpredictable oscillations, are considered for the models. The motions continue a line of periodic and almost periodic oscillations. The research is of very strong importance for neuroscience, since the existence of unpredictable solutions proves Poincaré chaos. Sufficient conditions have been determined for the existence, uniqueness, and exponential stability of unpredictable solutions. The results can significantly extend the role of oscillations for artificial neural networks exploitation, since they provide strong new theoretical and practical opportunities for implementation of methods of chaos extension, synchronization, stabilization, and control of periodic motions in various types of neural networks. Numerical simulations are presented to demonstrate the validity of the theoretical results.
1. Introduction
In recent decades, dynamicists have focused on the study of neural networks. Many results on stability, periodicity, synchronization analysis, and chaos in neural networks have been published. Some authors investigated neural networks by adding inertia. For example, inertial bidirectional associative memory (BAM) neural networks [1,2,3,4,5,6], inertial Cohen–Grossberg-type neural networks [7,8], electronic neural networks with inertia [9], and inertial memristive neural networks [10,11,12] have been studied.
Oscillations are in a focus of neuroscience, since they correlate with many cognitive tasks. For example, oscillatory neural networks are productive for investigation of image recognition [13,14], as well as activating network states associated with memory recall [15]. They became the core of interdisciplinary research which unites psychophysics, neuroscience, cognitive psychology, biophysics, and computational modeling [16,17]. Chaoticity in neural networks analysis is reflected by data related to experiments and observations [18,19,20].
Artificial neural networks are involved in computing systems and are designed to simulate the way the human brain analyzes and processes information. They are in the foundation of artificial intelligence and solves problems that would prove impossible or difficult by human or statistical standards. Artificial neural networks allow modeling of nonlinear processes, and they have turned into a very popular and useful tool for solving many problems such as classification, clustering, regression, pattern recognition, structured prediction, machine translation, anomaly detection, decision-making, and visualization [21,22,23,24,25,26].
In the present research, a new type of oscillation, which is described by the unpredictable functions, and was introduced in [27], is investigated. The line of periodic and almost periodic motions of neural networks is continued. The Poincaré chaos has already been approved by the existence of unpredictable solutions for a Hopfield type neural network [28] and shunting inhibitory cellular neural networks [29]. The notion of the unpredictable function is strictly connected to the concept of the unpredictable point [27,30,31]. This has been confirmed in papers by Miller [32], Thakur, and Dus [33] in which unpredictable points are very useful for analysis of Poincaré, strongly Ruelle–Takens and strongly Auslander–Yorke chaos in topological spaces. The unpredictable functions are introduced for the analysis of chaos through methods of differential and discrete equations [34,35]. The study of these functions indicates theoretical advantages and problems that apply to both oscillation theory and chaos theory, and this opens up many interesting perspectives in neuroscience.
Our main purpose is to give the conditions ensuring the existence, uniqueness, and asymptotic stability of the unpredictable oscillations in inertial neural networks.
2. Preliminaries
Throughout the paper, and will stand for the set of real and natural numbers, respectively. Additionally, the norm where will be used. The following definition is the main one in our study.
Definition 1
([27]). A uniformly continuous and bounded function is unpredictable if there exist positive numbers and sequences both of which diverge to infinity such that as uniformly on compact subsets of and for each and .
The convergence of the sequence is said to be Poisson stability of the unpredictable function or simply Poisson stability as well as existence of the numbers and the sequence allow the unpredictability property of the unpredictable function.
In this paper, we consider the following inertial neural networks:
where denotes the number of neurons in the network, with corresponds to the state of the unit i at time are constants, with denote the measures of activation to its incoming potentials of the unit i at time t, for all are constants, which denote the connection strength between ith neuron and jth neuron, are external inputs on the ith neuron at the time We assume that the coefficients are real, the activations are continuous functions that satisfy the following condition:
- (C1)
- for all where are Lipschitz constants, for and
According to the results in [36], the couple is a bounded solution of (3), if and only if the next integral equations are satisfied:
where
The following conditions will be needed throughout the paper:
- (C2)
- the functions in system (1) are unpredictable; they belong to and there exist positive numbers and the sequence as such that for all and
- (C3)
- there exists a positive number such that
There exist positive real numbers such that the following inequalities are valid:
- (C4)
- (C5)
- for each ;
- (C6)
- H is a positive number, ;
- (C7)
- (C8)
3. Main Results
In this section, we will use the norm for dimensions p and Denote by the set of vector-functions, , such that:
- (K1)
- functions are uniformly continuous;
- (K2)
- there exists a positive number H such that for all
- (K3)
- there exists a sequence, as such that uniformly converges to on each bounded interval of the real line.
Define on an operator such that where
Lemma 1.
The operator Π is invariant in
Proof.
For a function and fixed we have that
Conditions (C5), (C6) imply that for each —thus that Thus, condition (K2) is valid.
Let us fix a positive number and a section We will show that, for sufficiently large n, it is true that on One can find that
Choose numbers and satisfying the following inequalities:
Consider the number n sufficiently large such that and on . Then, for all it is true that
Lemma 2.
The operator Π is a contraction mapping on Σ.
Proof.
For any one can attain that
The last inequality yields Hence, in accordance with conditions (C4),(C7), the operator is contractive. □
Theorem 1.
Assume that conditions (C1)–(C8) are fulfilled. Then, the system (1) admits a unique asymptotically stable unpredictable solution.
Proof.
Let us check the completeness of the space . Consider a Cauchy sequence in , which converges to a limit function on . Since conditions (K1) and (K2) are easy to verify, it suffices to show that satisfies condition (K3). Fix a closed and bounded interval We obtain that
If n and k are sufficiently large, then each term on the right-hand side of (11) is smaller than for an arbitrary and . This means that uniformly converges to on The completeness of space is verified. From Lemmas 1, 2 and contraction mapping theorem, it follows that there exists a unique solution of Equation (1).
Next, we prove the unpredictability property. It is true that
There exist a positive number and integers l and k such that, for each the following inequalities are valid:
Let the numbers and k as well as numbers and be fixed.
Firstly, consider the following two alternatives for : (i) (ii) such that the remaining proof falls naturally into two parts.
(i) For the case , by (15), we get that
if and
(ii) From (15), it follows that
if
Now, using inequalities (13), (14), (17) and relation (12), we have that
for and Thus, we have obtained that
for
That is, one can conclude that is an unpredictable solution.
Now, we will discuss the stability of the solution . Let us define the 2p-dimensional function
and rewrite system (3) in the vector form
where is a diagonal matrix, is a vector-function such that
It is true that
Let be another solution of system (1). One can write
We denote by and
Then, we have that
Applying the Gronwall–Bellman Lemma, one can attain that
and condition (C8) implies that is a uniformly exponentially stable solution of system (1). The theorem is proved. □
In the next section, the following lemmas is necessary.
Lemma 3
([34]). If the function is unpredictable, then the function , where C is a constant, is also unpredictable.
Lemma 4
([34]). Suppose that is an unpredictable function. Then, the function is unpredictable.
4. Examples
According to results in [27], the logistic map
where and has an unpredictable solution. Let be a piecewise constant function which is defined by for where is the unpredictable solution of system (21).
As a function of external inputs, we will use an unpredictable function [28]:
Let us take into account the system
where
and The function is unpredictable in accordance with Lemmas 3 and 4. The conditions (C1)–(C8) hold for the network (23) with It is not difficult to calculate that Consequently, there exists the unpredictable solution, of the system. Since it is not possible to indicate the initial value of the solution, we apply the property of asymptotic stability, since any solution from the domain ultimately approaches the unpredictable oscillation. That is, to visualize the behavior of the unpredictable oscillation, we consider the simulation of another solution. We shall simulate the solution with initial conditions
Utilizing (20), we have that
Thus, if then and we can say that the graphs of the functions match visually, since they have technical conditions [37]. In other words, what is seen in Figure 1 and Figure 2 for a sufficiently large time can be accepted as parts of the graph and trajectory of the unpredictable solution. Both of the figures reveal the irregular dynamics of system (23).
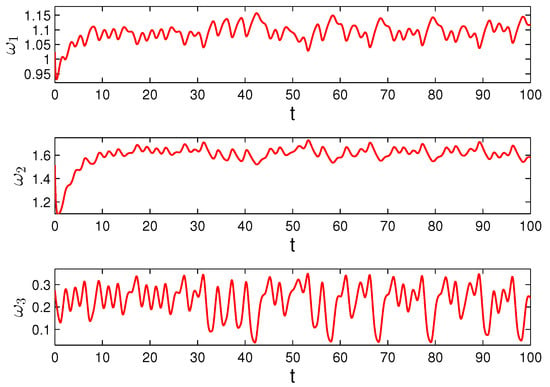
Figure 1.
The coordinates of the function which exponentially converge to the coordinates of the unpredictable solution of Equation (23).
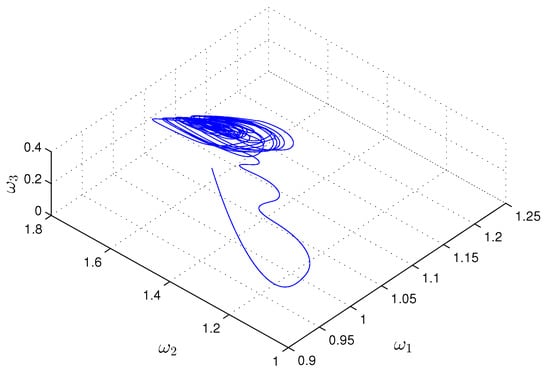
Figure 2.
The irregular trajectory of the solution
5. Conclusions
We believe that the theorem that has been proved in the paper creates new circumstances in neuroscience, when extension, control, synchronization, and stabilization of periodic motions in chaotic dynamics can be realized more effectively than by conservative methods. The results are suitable for numerical simulations, and the dynamics can be subdued for more extended numerical analysis similar to the Lyapunov exponents evaluation and bifurcation diagram construction. The huge area of applications for the present research suggestions are nonlinear neural networks. For these models, the averaging method and different types of fixed point theorems can be utilized.
Application of the approach suggested in the present research can be effective with respect to different inertial mechanisms for dynamical systems and artificial neural networks. One can consider the applicability in the light of fractional human models [21] as well as artificial neural networks for uncertainly prediction [24], modeling the human driver [25], decision-making [26], classification [22], and machine translation [23].
Author Contributions
M.A.: Conceptualization; Methodology; Investigation. M.T.: Investigation; Supervision; Writing—review and editing. A.Z.: Software; Investigation; Writing—original draft. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
M.A. and has been supported by a grant (118F161) from TÜBİTAK, the Scientific and Technological Research Council of Turkey. M.T. and A.Z. have been supported by the MES RK Grant No. AP05132573 “Cellular neural networks with continuous/discrete time and singular perturbations” (2018–2020) of the Ministry of Education and Science of the Republic of Kazakhstan.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ge, J.; Xu, J. Weak resonant double Hopf bifurcations in an inertial four-neuron model with time delay. Int. J. Neural Syst. 2012, 22, 22–63. [Google Scholar] [CrossRef]
- Ke, Y.Q.; Miao, C.F. Stability analysis of BAM neural networks with inertial term and time delay. WSEAS Trans. Syst. 2011, 10, 425–438. [Google Scholar]
- Ke, Y.Q.; Miao, C.F. Stability and existence of periodic solutions in inertial BAM neural networks with time delay. Neural Comp. Appl. 2013, 23, 1089–1099. [Google Scholar]
- Qi, J.; Li, C.; Huang, T. Stability of inertial BAM neural network with time-varying delay via impulsive control. Neurocomputing 2015, 161, 162–167. [Google Scholar] [CrossRef]
- Zhang, Z.; Quan, Z. Global exponential stability via inequality technique for inertial BAM neural networks with time delays. Neurocomputing 2015, 151, 1316–1326. [Google Scholar] [CrossRef]
- Zhang, W.; Huang, T.; Li, C.; Yang, J. Robust Stability of Inertial BAM Neural Networks with Time Delays and Uncertainties via Impulsive Effect. Neural Process. Lett. 2018, 44, 245–256. [Google Scholar] [CrossRef]
- Ke, Y.Q.; Miao, C.F. Stability analysis of inertial Cohen–Grossberg-type neural networks with time delays. Neurocomputing 2013, 117, 196–205. [Google Scholar] [CrossRef]
- Yu, S.; Zhang, Z.; Quan, Z. New global exponential stability conditions for inertial Cohen–Grossberg neural networks with time delays. Neurocomputing 2015, 151, 1446–1454. [Google Scholar] [CrossRef]
- Babcock, K.L.; Westervelt, R.M. Stability and dynamics of simple electronic neural networks with added inertia. Phys. D Nonlinear Phenom. 1986, 23, 464–469. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Premalatha, S.; Chandrasekar, A.; Cao, J. Stability and synchronization analysis of inertial memristive neural networks with time delays. Cogn. Neurodyn. 2016, 10, 437–451. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Gayathri, D.; Velmurugan, G.; Cao, J. Exponential Synchronization of Inertial Memristor-Based Neural Networks with Time Delay Using Average Impulsive Interval Approach. Neural Process. Lett. 2019, 50, 2053–2071. [Google Scholar] [CrossRef]
- Qin, S.; Gu, L.; Pan, X. Exponential stability of periodic solution for a memristor-based inertial neural network with time delays. Neural Comp. Appl. 2020, 32, 3265–3281. [Google Scholar] [CrossRef]
- Ramya, C.; Kavitha, G.; Shreedhara, K.S. Recalling of images using Hopfield neural network model. arXiv 2011, arXiv:1105.0332. [Google Scholar]
- Raiko, T.; Valpola, H. Oscillatory neural network for image segmentation with based competition for attention. Adv. Exp. Med. Biol. 2011, 718, 75–85. [Google Scholar] [PubMed]
- Schmidt, H.; Avitabile, D.; Montbrio, E.; Roxin, A. Network mechanisms underlying the role of oscillations in cognitive tasks. PLoS Comput. Biol. 2018, 14, e1006430. [Google Scholar] [CrossRef] [PubMed]
- Koepsell, K.; Wang, X.; Hirsch, J.; Sommer, F. Exploring the function of neural oscillations in early sensory systems, second edition. Front. Neurosci. 2010, 4, 53. [Google Scholar]
- Maguire, M.; Abel, A. What changes in neural oscillations can reveal about developmental cognitive neuroscience: Language development as a case in point. Develop. Cogn. Neurosci. 2013, 6, 125–136. [Google Scholar] [CrossRef]
- Hart, J.; Roy, R.; Muller-Bender, D.; Otto, A.; Radons, G. Laminar chaos in experiments: Nonlinear systems with time-varying delays and noise. Phys. Rev. Lett. 2019, 123, 154101. [Google Scholar] [CrossRef]
- Korn, H.; Faure, P. Is there chaos in the brain? II. Experimental evidence and related models. Neurosci. C. R. Biol. 2003, 326, 787–840. [Google Scholar] [CrossRef]
- Lassoued, A.; Boubaker, O.; Dhifaoui, R.; Jafari, S. Experimental observations and circuit realization of a jerk chaotic system with piecewise nonlinear function. In Recent Advances in Chaotic Systems and Synchronization; Boubaker, O., Jafari, S., Eds.; Elsevier: San Diego, CA, USA, 2019; pp. 3–21. [Google Scholar]
- Martínez-García, M.; Zhang, Y.; Gordon, T. Memory Pattern Identification for Feedback Tracking Control in Human–Machine Systems. Hum. Factors 2019. [Google Scholar] [CrossRef]
- Sharma, N.; Gedeon, T. Artificial Neural Network Classification Models for Stress in Reading. In ICONIP 2012: Neural Information Processing; Springer: Berlin/Heidelberg, Germany, 2012; pp. 388–395. [Google Scholar]
- Costa-juss‘a, M.R. From Feature to Paradigm: Deep Learning in Machine Translation. J. Artif. Intell. Res. 2018, 61, 947–974. [Google Scholar] [CrossRef]
- Kasiviswanathan, K.S.; Sudheer, K.P.; He, J. Quantification of prediction uncertainty in artificial neural network models. In Artificial Neural Network Modelling; Shanmuganathan, S., Samarasinghe, S., Eds.; Springer: Cham, Switzerland, 2016; pp. 145–159. [Google Scholar]
- MacAdam, C.C. Understanding and modeling the human driver. Veh. Syst. Dyn. 2003, 40, 101–134. [Google Scholar] [CrossRef]
- Hui, P.C.L.; Choi, T.-M. Using artificial neural networks to improve decision-making in apparel supply chain systems. In Information Systems for the Fashion and Apparel Industry; Choi, T.-M., Ed.; Woodhead Publishing: Sawston, UK, 2016; pp. 97–107. [Google Scholar]
- Akhmet, M.; Fen, M.O. Poincaré chaos and unpredictable functions. Commun. Nonlinear Sci. Nummer. Simul. 2017, 48, 85–94. [Google Scholar] [CrossRef]
- Akhmet, M.; Fen, M.O. Non-autonomous equations with unpredictable solutions. Commun. Nonlinear Sci. Nummer. Simul. 2018, 59, 657–670. [Google Scholar] [CrossRef]
- Akhmet, M.; Seilova, R.D.; Tleubergenova, M.; Zhamanshin, A. Shunting inhibitory cellular neural networks with strongly unpredictable oscillations. Commun. Nonlinear Sci. Numer. Simul. 2020, 89, 105287. [Google Scholar] [CrossRef]
- Akhmet, M.; Fen, M.O. Unpredictable points and chaos. Commun. Nonlinear Sci. Nummer. Simul. 2016, 40, 1–5. [Google Scholar] [CrossRef]
- Akhmet, M.; Fen, M.O. Existence of unpredictable solutions and chaos. Turk. J. Math. 2017, 41, 254–266. [Google Scholar] [CrossRef]
- Miller, A. Unpredictable points and stronger versions of Ruelle–Takens and Auslander—Yorke chaos. Topol. Appl. 2019, 253, 7–16. [Google Scholar] [CrossRef]
- Thakur, R.; Das, R. Strongly Ruelle-Takens, strongly Auslander-Yorke and Poincaré chaos on semiflows. Commun. Nonlinear. Sci. Numer. Simul. 2019, 81, 105018. [Google Scholar] [CrossRef]
- Akhmet, M.; Fen, M.O.; Tleubergenova, M.; Zhamanshin, A. Unpredictable solutions of linear differential and discrete equations. Turk. J. Math. 2019, 43, 2377–2389. [Google Scholar] [CrossRef]
- Akhmet, M.; Tleubergenova, M.; Zhamanshin, A. Poincare chaos for a hyperbolic quasilinear system. Miskolc Math. Notes 2019, 20, 33–44. [Google Scholar] [CrossRef]
- Driver, R.D. Ordinary and Delay Differential Equations; Springer Science Business Media: New York, NY, USA, 2012. [Google Scholar]
- Moor, H. MATLAB for Engineers, 3rd ed.; Pearson: London, UK, 2012. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).