Abstract
Two iterative algorithms are suggested for approximating a solution of the split common fixed point problem involved in pseudo-contractive operators without Lipschitz assumption. We prove that the sequence generated by the first algorithm converges weakly to a solution of the split common fixed point problem and the second one converges strongly. Moreover, the sequence generated by Algorithm 3 strongly converges to which is the minimum-norm solution of problem (1). Numerical examples are included.
Keywords:
split common fixed point problem; iterative algorithms; pseudo-contractive operators; Lipschitz assumption MSC:
47H10; 49M37; 49K35; 90C25
1. Introduction
The split common fixed point problem was investigated in 2009 by Censor Y. and Segal A. [1]. Further research on this problem discussed in works by the authors of [2,3,4,5,6,7,8,9,10,11,12]. More specifically, given two Hilbert space and , nonlinear operators and and a bounded linear operator A: . Let be a solution of split common fixed point problem satisfying
where and mean the fixed point sets. If U and T are both metric projects, problem (1) is actually problem (2) [13,14], and further development of this topic made by [15,16,17,18,19]. To be more specific, given two nonempty closed convex sets and and A is above mentioned. Let be a solution of split feasibility problem satisfying
These two problems ((1) and (2)) have received much attention, and have been extensively investigated due to applications in signal processing, image reconstruction, [14], and intensity modulated radiation therapy [20]. Recently, Yen L. et al. [21] learn the problem (2) and applying it to a model in electricity production, they successfully established a Nash–Cournot equilibrium model with minimal environmental cost. Wang J. et al. [22] study the linear convergence of CQ algorithm for solving the problem (2) and investigate an application in gene regulatory network inference.
For solving the problem (1), Censor Y. and Segal A. [1] suggested the following scheme.
where is a fixed stepsize and is the adjoint operator of A. Algorithm (3) was originally designed to solved problem (1) for directed operators. Noting that if the stepsize is chosen in , then the iterative sequence generated by (3) weakly converges to a solution of the problem (1). Subsequently, iterative schemes and these variants [10,23] were explored to the demicontractive operators, quasi-nonexpansive operators and finite many directed operators.
Very recently, Wang F. [23] has been devoting himself to the study of problems (1). Accordingly, he proposed a new method for solving the problems (1) so that the variable stepsize does not need to compute the norm :
where is chosen such that
Wang obtained the weak convergence of algorithm (4).
In this paper, we extend a previous author’s results from the demicontractive operators [8,10,24], firmly-nonexpansive operators [25], quasi-nonexpansive operators [26], directed operators [1], nonexpansive operators [27], and strictly pseudo-contractive operators [28] to the more general pseudo-contractive operators. Subsequently, two algorithms are suggested based on (4) and (5) to solve the problem (1). Weak and strong convergence of the proposed algorithms are obtained.
2. Preliminaries
Let be a real Hilbert space equipped up its inner product and norm [8]. The notation means weak convergence and means strong one. The notation stands for the set of fixed points of the operator T. The symbol denotes the weak -limit set of , that is,
Let C be a nonempty closed convex subset of . Recall that the projection from onto C defined by
Propsition 1
([10]). Given and .
- (1)
- , for all .
- (2)
- for all .
- (3)
- for all , which hence implies that is nonexpansive.
Definition 1
([4]). Let be a nonlinear operator.
- T is called nonexpansive if
- T is called firmly nonexpansive ifor equivalentlyAlso, the mapping I − T is firmly nonexpansive.
- T is called strictly pseudo-contractive if there exists such that
- L-Lipschitzian if there exists such that
Definition 2
([24]). Let be a nonlinear operator with .
- T is called demicontractive if there exists a constant such thator equivalently
- T is called directed ifwhich is equivalent to
Definition 3
([4]). Let be a nonlinear operator.
T is called pseudo-contractive if
It is well known that T is a pseudo-contractive operator if and only if
Propsition 2
([29]). Let T be a pseudo-contractive operator with the nonempty fixed point set , then the following conclusion holds.
Generally speaking, pseudo-contractive operators are also assumed to be L-Lipschitzian with . Next, to overcome the L-Lipschitzian property, the authors of [29] assume that the pseudo-contractive operator T satisfies the following condition.
Definition 4
([23]). Let be a nonlinear operator with . Then, is said to be demiclosed at zero, if, for any in , there holds the following implication:
The demiclosedness for pseudo-contractive operators in the following will often be used.
Lemma 1
([29]). Let be a real Hilbert space, C a closed convex subset of . Let be a continuous pseudo-contractive operator. Then
- (1)
- is a closed convex subset of C,
- (2)
- is demiclosed at zero.
To attain weak convergence result, the following result is useful.
Lemma 2
([10]). Let be a Hilbert space and be a bounded sequence in such that there exists a nonempty closed convex set satisfying
- (1)
- for every , exists;
- (2)
- each weak cluster point of the sequence is in C.
Then converges weakly to a point in C. More specifically, .
To attain strong convergence result, we need to use the following lemmas.
Lemma 3
([8]). Let be a sequence of nonnegative real numbers satisfying the property
where (0,1) and are such that
- (1)
- ;
- (2)
- either or .
Then converges to zero.
Lemma 4
([4]). Let be a sequence of real numbers. Assume does not decrease at infinity, that is, there exists at least a subsequence of such that for all . For every , define an as
Then as and for all ,
In the following two sections, we consider the problem (1) for pseudo-contractive operators without Lipschitz assumption. For problem (1), the standard assumptions are usually the following.
- the problem (1) is consistent, notation S means the solution set;
- both T and U are continuous pseudo-contractive operators without Lipschitz assumption.
3. Weak Convergence Theorem
Next come the iterative scheme for approximating a solution of the problem (1) involved in pseudo-contractive operators without Lipschitz assumption.
Algorithm 1.
Initial guess is arbitrary chosen and assume that has been constructed. If
then stop (i.e., solves the problem (1)); otherwise, calculate the next by the formula [23]:
where the stepsize sequence is chosen as
We need two lemmas to complete the convergence analysis of our proposed algorithm. The first lemma shows that the proposed algorithm is well defined.
Proof.
For any and (6), we have
Hence, and , and the proof is thus complete. □
Lemma 6.
Assume that the sequence satisfies
then it follows that
Proof.
By our hypothesis, we have
Hence, the desired assertion follows. □
The second lemma analyzes the convergence of the proposed algorithm. Now the weakly convergence of Algorithm 1 presented below.
Theorem 1.
Let be the sequence generated by Algorithm 1. Then, converges weakly to a solution of problem (1), where .
Proof.
For any , by the expression of , from (6), we obtain
Consequently,
In particular, , so is Féjer-monotone w.r.s. S.
Since is Féjer-monotone, so is nonincreasing. Hence, is bounded, and so is the sequence . Moreover,
In particular, we have
By Lemma 6, this yields From Lemma 1 and Lemma 2, sequence weakly converges to of problem (1). □
Now, we use the result to solve the problem (2).
Algorithm 2.
An initial guess is arbitrarily chosen and we assume that has been constructed. If
then stop (i.e., solves the problem (2)); otherwise, calculate the next by the formula [23]
where the stepsize sequence is chosen as
4. Strong Convergence Theorem
We proposed a damped algorithm so that the strong convergence is obtained.
Algorithm 3.
Initial guess is arbitrarily chosen and we assume has been constructed. If
then stop (i.e., solves the problem (1)); otherwise, calculate the next by the formula:
where the stepsize sequence is chosen as
Theorem 3.
Assume the parameters satisfy the following conditions.
- (i)
- , ;
- (ii)
Then the sequence generated by Algorithm 3 strongly converges to which is the minimum-norm solution of problem (1).
Proof.
Let . Analogously,
Two possible cases are considered.
Case one. Suppose and such that is nonincreasing. So, we have the existence of . This, together with (11) and conditions and , such that
By Lemma 6, this yields . As shown in Theorem 1, we can get succession of such that .
By the definition of , we deduce that
Let , . Then
Furthermore, we obtain from and the properties of that
This together with implies that . So,
Case two. Suppose , we have
Setting , then we have
For all , we now describe
So is non-decresing satisfying
As shown in Case 1, we get
This implies that
Thus, we obtain
By (15),
Using the above inequality and (17), we have
By Lemma 4, this yields
therefore, , i.e., . □
Algorithm 4.
Initial guess is arbitrarily chosen and we assume has been constructed. If
then stop (i.e., solves problem (2)); otherwise, calculate the next by the formula
where the stepsize sequence is chosen as
5. Numerical Example
Now, we illustrate the theoretical result by numerical examples.
Let , inner product , and norm Let , and . Clearly, Fix(U) = 3. It now
for all . Hence, U is a pseudo-contractive operator. So is . Truly, both U and T are satisfy the condition (6). For more detail of condition (6), please see the work by the authors of [29].
Let , , , , , then 3 is the approximation point of the Algorithm 1. Obviously, , , and . Next, we rewrite Algorithm 1:
Choosing initial values and , respectively, we can see from Figure 1 and the numerical results in Table 1 that the theoretical result of Theorem 1 was demonstrated.
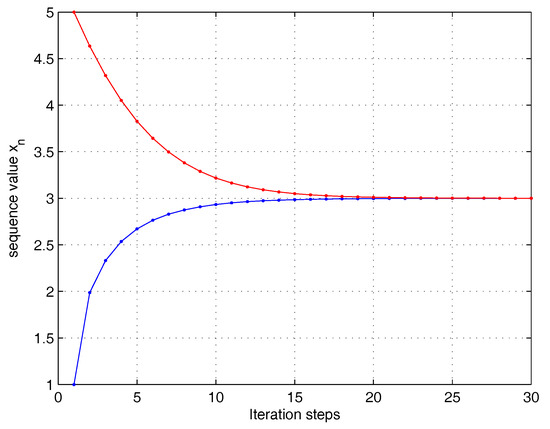
Figure 1.
Weak convergence of .

Table 1.
The values of the sequence .
Analogously, we now rewrite Algorithm 3 as follows.
Also, choosing initial values and , respectively, we can see from Figure 2 and the numerical results in Table 2 that the theoretical result of Theorem 3 was demonstrated.
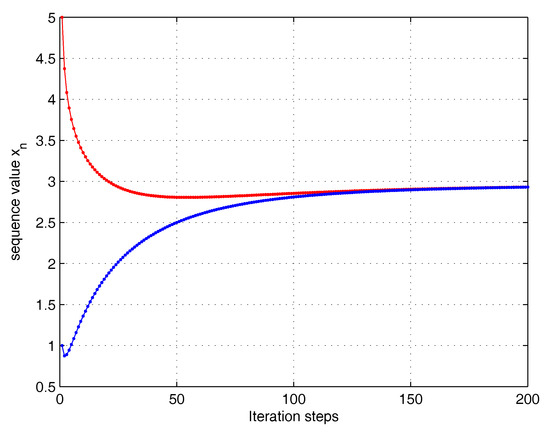
Figure 2.
Strong convergence of .
Table 2.
The values of the sequence .
6. Conclusions
In this paper, we investigated the problem (1) involved in pseudo-contractive operators without Lipschitz assumption. By extending someone’s results from [1,8,10,24,25,26,27,28] to the more general pseudo-contractive operators, we constructed two algorithm for solving the problem (1). Weak and strong convergence theorems are obtained under some mild hypotheses. Besides, we get the minimum-norm solution of problem (1); this is another interesting point. The results of this paper can be applied to engineering, network, and biotechnology.
Author Contributions
All authors participated in the conceptualization, validation, formal analysis, investigation, writing—original draft preparation, and writing—review and editing.
Funding
This work was supported by the Key Subject Program of Lingnan Normal University (Grant No. 1171518004), the Natural Science Foundation of Guangdong Province (2018A0303070012), and the Young Innovative Talents Project in Guangdong Universities (2017KQNCX125). Li-Jun Zhu was supported by the grants NXJG2017003, NXYLXK2017B09 and Advanced Intelligent Perception & Control Technology Innovative Team of NingXia.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Censor, Y.; Segal, A. The split common fixed point problem for directed operators. J. Convex Anal. 2009, 16, 587–600. [Google Scholar]
- Ansari, Q.; Rehan, A.; Wen, C. Implicit and explicit algorithm for split common fixed point problems. J. Nonlinear Convex Anal. 2016, 17, 1381–1397. [Google Scholar]
- Cegielski, A. General method for solving the split common fixed point problem. J. Optim. Theory Appl. 2015, 165, 385–404. [Google Scholar] [CrossRef]
- Yao, Y.; Agarwal, P.; Postolache, M.; Liou, Y. Algorithms with strong convergence for the split common solution of the feasibility problem and fixed point problem. Fixed Point Theory Appl. 2014, 2014, 183. [Google Scholar] [CrossRef]
- Yao, Y.; Liou, Y.; Yao, J. Iterative algorithms for the split variational inequality and fixed point problems under nonlinear transformations. J. Nonlinear Sci. Appl. 2017, 10, 843–854. [Google Scholar] [CrossRef]
- Yao, Y.; Leng, L.; Postolache, M.; Zheng, X. Mann-type iteration method for solving the split common fixed point problem. J. Nonlinear Convex Anal. 2017, 18, 875–882. [Google Scholar]
- Yao, Y.; Shahzad, N. Strong convergence of a proximal point algorithm with general errors. Optim. Lett. 2012, 6, 621–628. [Google Scholar] [CrossRef]
- Yao, Y.; Yao, J.; Liou, Y.; Postolache, M. Iterative algorithms for split common fixed points of demicontractive operators without priori knowledge of operator norms. Carpathian J. Math. 2018, 34, 459–466. [Google Scholar]
- Zegeye, H.; Shahzad, N.; Yao, Y. Minimum-norm solution of variational inequality and fixed point problem in banach spaces. Optimization 2012, 64, 453–471. [Google Scholar] [CrossRef]
- Yao, Y.; Liou, Y.; Postolache, M. Self-adaptive algorithms for the split problem of the demicontractive operators. Optimization 2018, 67, 1309–1319. [Google Scholar] [CrossRef]
- Ceng, L.; Petrusel, A.; Yao, J. Relaxed extragradient methods with regularization for general system of variational inequalities with constraints of split feasibility and fixed point problems. Abstr. Appl. Anal. 2013, 891232. [Google Scholar] [CrossRef]
- Wachirapong, J.; Poom, K.; Cho, Y.; Kanokwan, S. A general algorithm for the split common fixed point problem with its applications to signal processing. Mathematics 2019, 7, 226. [Google Scholar]
- Censor, Y.; Elfviing, T. A multuprojection algorithms using Bregman project in a product space. Numer. Algor. 1994, 8, 221–239. [Google Scholar] [CrossRef]
- Byrne, C. Iterative oblique projection onto convex subsets and the split feasibility problem. Inverse Probl. 2012, 18, 441–453. [Google Scholar] [CrossRef]
- Ceng, L.; Wong, M.; Petrusel, A.; Yao, J. Relaxed implicit extragradient-like methods for finding minimum-norm solutions of the split feasibility problem. Fixed Point Theory 2009, 2, 327–344. [Google Scholar]
- Ceng, L.; Ansari, Q.; Yao, J. Relaxed extragradient methods for finding minimum-norm solutions of the split feasibility problem. Nonlinear Anal. 2012, 75, 2116–2125. [Google Scholar] [CrossRef]
- Ceng, L.; Ansari, Q.; Yao, J. An extragradient method for split feasibility and fixed point problems. Comput. Math. Appl. 2012, 64, 633–642. [Google Scholar] [CrossRef]
- Yao, Y.; Liou, Y.; Shahzad, N. A strongly convergent method for the split feasibility problem. Abstr. Appl. Anal. 2012, 125046. [Google Scholar] [CrossRef]
- Yao, Y.; Yang, P.; Shin, K. Composite projection algorithms for the split feasibility problem. Math. Comput. Model. 2013, 57, 693–700. [Google Scholar] [CrossRef]
- Censor, Y.; Bortfeld, T.; Martin, B.; Trofimov, A. A unified approach for inversion problems in intensity-modulated radiation therapy. Phys. Med. Biol. 2006, 51, 2353–2365. [Google Scholar] [CrossRef]
- Yen, L.; Muu, L.; Huyen, N. An algorithm for a class of split feasibility problems: application to a model in electricity production. Math. Meth. Oper. Res. 2016, 84, 549–565. [Google Scholar] [CrossRef]
- Wang, J.; Hu, Y.; Li, C.; Yao, J. Linear convergence of CQ algorithms and applications in gene regulatory network inference. Inverse Probl. 2017, 33, 055017. [Google Scholar] [CrossRef]
- Wang, F. A new iterative method for the split common fixed point in Hilbert spaces. Optimization 2017, 66, 407–415. [Google Scholar] [CrossRef]
- Cui, H.; Ceng, L.; Wang, F. Weak convergence theorems on the split common fixed point problem for demicontractive continuous mappings. J. Funct. Space 2018, 9610257. [Google Scholar] [CrossRef]
- Wang, F. A new method for split common fixed point problem without priori knowledge of operator norms. J. Fixed Point Theory Appl. 2017, 19, 2427–2436. [Google Scholar] [CrossRef]
- Moudafi, A. A note on the split common fixed-point problem for quasi-nonexpansive operators. Nonlinear Anal. 2011, 74, 4083–4087. [Google Scholar] [CrossRef]
- Wang, F.; Xu, H. Weak and strong convergence of two algorithms for the split fixed point problem. Numer. Math. Theory Meth. Appl. 2018, 11, 770–781. [Google Scholar]
- Cui, H.; Ceng, L. Iterative solutions of the split common fixed point problem for strictly pseudo-contractive mappings. J. Fixed Point Theory Appl. 2017, 20, 92. [Google Scholar] [CrossRef]
- Chen, J.; Ceng, L.; Qiu, Y.; Kong, Z. Extra-gradient methods for solving split feasibility and fixed point problems. Fixed Point Theory Appl. 2015, 2015, 192. [Google Scholar] [CrossRef][Green Version]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).