Abstract
The Skew-Reflected-Gompertz (SRG) distribution, introduced by Hosseinzadeh et al. (J. Comput. Appl. Math. (2019) 349, 132–141), produces two-piece asymmetric behavior of the Gompertz (GZ) distribution, which extends the positive to a whole dominion by an extra parameter. The SRG distribution also permits a better fit than its well-known classical competitors, namely the skew-normal and epsilon-skew-normal distributions, for data with a high presence of skewness. In this paper, we study information quantifiers such as Shannon and Rényi entropies, and Kullback–Leibler divergence in terms of exact expressions of GZ information measures. We find the asymptotic test useful to compare two SRG-distributed samples. Finally, as a real-world data example, we apply these results to South Pacific sea surface temperature records.
1. Introduction
The Skew-Reflected-Gompertz (SRG) distribution was recently introduced by [1] and corresponds to an extension of the Gompertz distribution [2], named after Benjamin Gompertz (1779–1865). It extends the positive dominion to the whole of by an extra parameter, , , and produces two-piece asymmetric behavior of Gompertz (GZ) density. The SRG distribution has as particular cases the Reflected-GZ and GZ distributions, when and , respectively. The SRG distribution family can also represent a suitable competitor against the skew-normal (SN, [3]) and epsilon-skew-normal (ESN, [4]) distributions as a way to fit asymmetrical datasets. Indeed, refs. [5,6] dealt with the frequentist and Bayesian inferences of ESN distribution. Contributions by [1] provided probability density function (pdf), cumulative distribution function (cdf), quantile function, moment-generating function (MGF), stochastic representation, the Expectation-Maximization (EM) algorithm for SRG parameter estimates and the Fisher information matrix (FIM).
Moreover, several recent investigations confirmed the usefulness of entropic quantifiers in the study of asymmetric distributions [3,7,8] and their applications to topics such as thermal wake [9], marine fish biology [3,8], sea surface temperature (SST), relative humidity measured in the Atlantic Ocean [10], and more. We build on the study of [3], which developed hypothesis testing for normality, i.e., if the shape parameter is close to zero. They considered the Kullback–Leibler (KL) divergence in terms of moments and cumulants of the modified SN distribution. Posteriorly, we consider a real-world data set of the anchovy condition factor for testing the shape parameter to decide if a food deficit produced by environmental conditions such as El Niño exists [11].
This work arose from a motivation to tackle the problem of determining the adequate pdf of SST [9,10]. Indeed, probabilistic modelling of SST is key for accurate predictions [9]. Therefore, we propose that the SRG model based on two-piece distributions could be more suitable for interpreting annual bimodal and asymmetric SST data. We also considered the existent results of Shannon and Rényi entropies, and KL divergence for GZ distributions for developed entropic quantifiers for SRG distributions. Posteriorly, we considered SST along the South Pacific and Chilean coasts from 2012 to 2014 to illustrate our results. Specifically, we introduced hypothesis testing developed by [12] for the SRG distribution, which is useful to compare two data sets with bimodal and asymmetric behavior such as SST.
2. The Skew-Reflected-Gompertz Distribution
The Gompertz (GZ, [2]) distribution is a continuous probability distribution with the following pdf
where and are the scale and shape parameters, respectively, and are denoted by . The mean and variance of X are
respectively; where , , is the Euler constant and
The SRG distribution is an extension of the GZ proposed by [1]. If Y follows, the SRG distribution is denoted by and has pdf
where is the location parameter and is the slant parameter. Note that SRG is the GZ distribution when and , GZ distribution with negative support when , and Reflected-GZ distribution when . Also, the Reflected-GZ distribution corresponds to a particular case of a more general class of two-piece asymmetric distributions proposed by [13,14]. The mean, variance and MGF of Y are
respectively; where . Jafari et al. [15] provide the MGF of X using expansion series. However, (4) is considered a clearer expression that depends only on integral . See Section 4.1 for some details of the MLE EM-based algorithm related to SRG parameters.
According to [1], the SRG distribution can be re-parametrized in terms of GZ and Reflected-GZ distributions as
where , , and . Let be an i.i.d sample from the SRG distribution with parameters and latent vectors , thus (5) can be equivalently represented as , , , where is a multinomial vector, , , and . Given that , the complete log-likelihood function is
Conditional expectations of latent variables are given by
The E- and M-steps on the th iteration of the EM algorithm are
- E-step. From (6)–(8), we haveand
- M-step. Update , by solving the following equation
Update by solving the following equation
Update by
The EM-algorithm must be iterated until the sufficient convergence rule is satisfied:
for a tolerance close to zero. The FIM for standard deviations of MLEs and additional details of the EM-algorithm are described in [1].
3. Entropic Quantifiers
In the next section, we present the main results of entropic quantifiers for SRG distribution.
3.1. Shannon Entropy
The Shannon entropy (SE), introduced by [16] in the context of univariate continuous distributions, quantifies the information contained in a random variable X with pdf through the expression
The SE concept is attributed to the uncertainty of the information presented in X [17]. Propositions 1 and 2 present the SE for GZ and SRG distributions, respectively.
Proposition 1.
Substituting and into (4) (i.e., reducing SRG to its special case GZ), we obtain . Therefore, in Proposition 1 is reduced to
i.e., the SE of the GZ random variable only depends on shape parameter .
Proposition 2.
The SE of is
where and are obtained using Proposition 1.
From (10), given that only depends on shape parameter , we obtain , and only depends on and parameters. Therefore,
Figure 1 illustrates SE behavior for random variable Y. We observed that SE increases when decreases. For each , SE is maximized and minimized at (Reflected-GZ) and (Truncated-GZ and GZ), respectively. More details appear in [3,8] for the SE expressions of other asymmetric distributions.
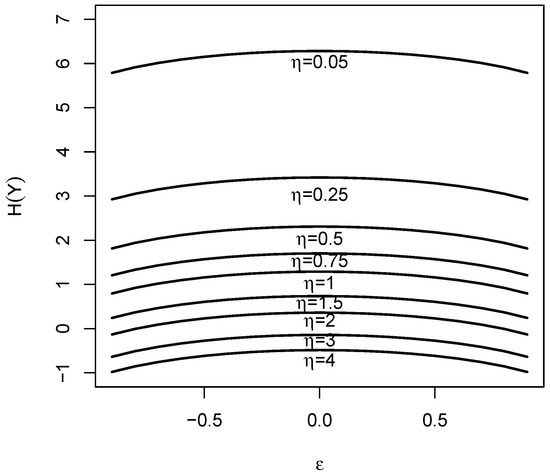
Figure 1.
Shannon entropy of Skew-Reflected-Gompertz (SRG) distributions for and several values of .
3.2. Rényi Entropy
The th-order Rényi entropy (RE), introduced by [18] in the context of univariate continuous distributions, extends the concept of SE information contained in a random variable X with pdf through a level , , , and the expression
RE information can be negative and is ordered with respect to , i.e., for any (see, e.g., [7] and other properties of RE). From (12), the SE is obtained by the limit of by applying l’Hôpital’s rule to with respect to (see e.g., [7]). The RE of the GZ and SRG distributions is presented in Propositions 3 and 4, respectively.
Proposition 3.
[15,19]. The RE of with , , is
where is the gamma function.
Proposition 4.
The RE of with , , is
where and are obtained using Proposition 3.
Figure 2a illustrates the behavior of RE for random variable Y when (quadratic RE). As in the SE case, we also observed that RE increases when decreases and reaches maximum and minimum at (Reflected-GZ) and (Truncated-GZ and GZ), respectively. When (or ) (see Figure 2b), RE decays faster than in the quadratic RE case as . More details appear in [7] for the RE expressions of other asymmetric distributions.
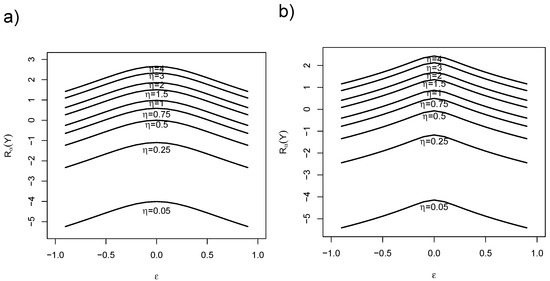
Figure 2.
Rényi entropy of SRG distributions for , , several values of and (a) and (b) values.
3.3. Kullback–Leibler Divergence
The Kullback–Leibler (KL) divergence introduced by [20] in the context of univariate continuous distributions, extends the concept of SE between two random variables and with pdfs and , respectively, through the expression
The KL divergence measures the disparity between the pdfs of and , and is non-negative, non-symmetric and zero only if in distribution. Also, the KL divergence does not satisfy the triangular inequality (see, e.g., [8,17] for other properties of KL and other divergences). The KL divergence for two GZ and two SRG distributions are presented in Propositions 5 and 6.
Proposition 5.
[21]. The KL divergence between and is
where is the upper incomplete gamma function.
Proposition 6.
The KL divergence between and is
where , , and are obtained using Proposition 5.
More details appear in [3,8] for the KL divergence expressions of other asymmetric distributions. Using Proposition 6, the asymptotic KL divergence between and is
as . However, we see that as and is not finite. However, from Proposition 6 the asymptotic KL divergence between and is
as , where . Therefore, while is not finite, is finite and can be used to study the disparity of from −1. Thus, hypothesis testing for can be addressed. Besides, we further study hypothesis testing for scale and shape parameters between two SRG distributions in Section 3.4. From (14), we also took that as , with .
Figure 3 illustrates the KL divergence between two SRG distributions. We observed that for the critical points of , the KL divergence reaches the highest values and is close to zero in the other values [panels (a) and (b)]. For large ’s [panel (c)], the KL divergence is zero for a concentrated region of the dominion where .
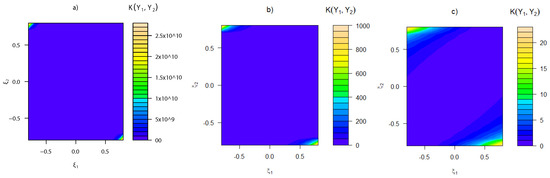
Figure 3.
Plots of Kullback–Leibler (KL) divergence between and for values and (a) ; (b) ; and (c) .
All information quantifiers and the EM algorithm for SRG distribution were implemented in [22].
3.4. Asymptotic Test
Consider two independent samples of sizes and from and , respectively; where , and and have pdfs and , respectively; with , . Suppose partition , and assume , so that . Let be the MLE of for , which corresponds to the MLE of the full model parameters under the null hypothesis . Thus, part b) of Corollary 1 in [12] establishes that if the null hypothesis holds and , with , then
where is the number of parameters of the SRG distribution (location parameter is not considered for KL divergence). Thus, a test of level for the above homogeneity null hypothesis consists of rejecting if , where is the th percentile of the -distribution.
As [3] stated, the proposed asymptotic test is only valid for regular conditions of the SRG distribution, in particular for a non-singular FIM. Therefore, given that the SRG distributions’ FIM is singular at [1], the SRG model does not serve for testing the null hypothesis using (15) when is close to −1 or 1.
4. Application
4.1. Sea Surface Temperature Data
The spatial information and SST data analyzed in this study were recorded by a scientific observer (whose labor concerns biological sampling of fishes, incidental captures of birds, turtles and marine mammals. Biological sampling was complemented with information such as time, longline and hook features, number of buoys, baits, etc.) (SO) in the Chilean longline fleet (industrial and artisanal), which was oriented to capture swordfish (Xiphias gladius, [23]) from 2012 to 2014 (obtaining a sampling of 83% in 2012, 55% in 2013, 90% in 2014, and 75% in 2012–2014). The covered area of the study was at 31′–39′ LS and 08′–52′ LW (see Figure 4).
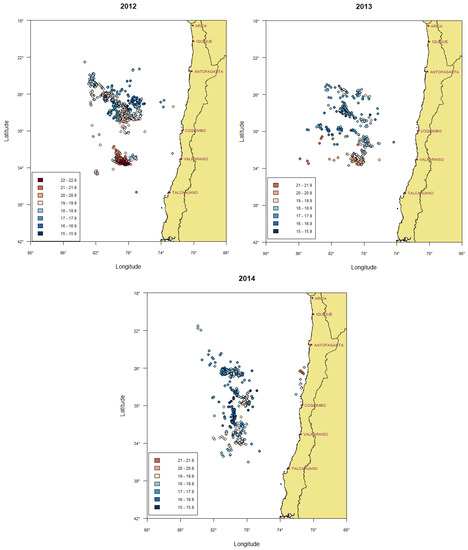
Figure 4.
Spatial distribution of Sea Surface Temperature (SST) observations by year (31′–39′ LS, 08′–52′ LW).
SST records in swordfish captures are crucial for distributional analysis and fish abundance. Specifically, variations in SST are physical factors that control productivity, growth and migration of species [24]. In addition, SST is strongly correlated with atmospheric pressure at sea level and thus climatic time scales. Therefore, changes in SST overlap with ecosystem changes [25]. However, SST influence on ecosystems is not clear because other physical processes such as superficial warming, horizontal advection of currents, upwelling, etc. [11], modify SST. Therefore, SST anomalies could be symptomatic rather than causal.
4.1.1. SRG Parameter Estimates
Considering the smallest Akaike (AIC) and Schwarz (BIC) information criteria, we observed in Table 1 that SRG performs better than the SN and ESN models (see Appendix A and Appendix B, respectively). In addition, Table 1 shows the estimated parameters (based on the EM algorithm presented in Section 2) for SST datasets by year assuming SRG distribution. In 2012, a negative estimate corresponds to asymmetry to the right, and in 2013 and 2014 negative and close to zero produce a two-piece distribution to fit “cold” and “warm” temperatures (Figure 5).

Table 1.
Parameter estimates and their respective standard deviations (SD) for SST by year based on SRG, epsilon-skew-normal (ESN) and skew-normal (SN) models. For each model, log-likelihood function , , Akaike’s (AIC) and Bayesian (BIC) information criteria, and goodness-of-fit tests (Kolmogorov–Smirnov (K–S), Anderson–Darling (A–D), and Cramer–von Mises, (C–V)) are also reported with respective p-values in parentheses.
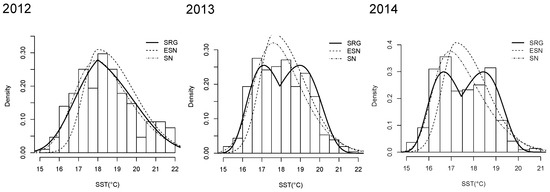
Figure 5.
MLE fit of SRG, ESN and SN models for SST data by year.
To evaluate the goodness-of-fit test, the Kolmogorov–Smirnov (K–S), Anderson–Darling (A–D), and Cramer–von Mises (C–V) tests were considered for all models, commonly used to analyze the goodness-of-fit test of a particular distribution see, e.g., [26]). Considering a 95% confidence level, SRG fits perform well for 2012 and 2013, and on a 90% confidence level, the SRG fit performs well for 2014.
4.1.2. Information Quantifiers and Asymptotic Test
Parameters estimated from the SRG model and presented in Table 1 are used to perform the quantifiers of Section 3.1–Section 3.3 for SST in each year and for the asymptotic test of Section 3.4 for comparing SST between two years. The results of these analyses are shown in Table 2. In Table 2, represents the KL divergence between the years (column) and (row).
The first quantifiers (SE and RE) illustrate that the highest information of SST is obtained by SE and increases with the increment of years. For all RE, the highest information of SST is obtained in 2012 and is negative for 2013 and 2014 and similar during that period. Differences in information between SE and RE are produced by the independency of SE with parameter , while RE depends on three parameters as in Proposition 4.
In addition, the asymptotic test presented in Table 2 is analogous for all the years in both groups. In fact, the null hypothesis is rejected at a 95% confidence level. This rejection is reinforced by high values of statistics , produced by a high sample size of both groups ( and ).
5. Conclusions
We have presented a methodology to compute the Shannon and the Rényi entropy and the Kullback–Leibler divergence for the family of Skew-Reflected-Gompertz distributions. Our methods consider the information quantifiers previously computed for the Gompertz distribution. Explicit formulas for Shannon and Rényi entropies (in terms of the Gompertz, Shannon and Rényi entropies, respectively), and the Kullback–Leibler divergence (using incomplete gamma function) facilitate easy computational implementation. Additionally, given the regularity conditions accomplished by the Skew-Reflected-Gompertz distribution, specifically by the Fisher information matrix convergence when is in , an asymptotic test for comparing two groups of datasets was developed.
The statistical application to South Pacific sea surface temperature was given. We first carried out SRG goodness-of-fit tests in samples over three years, where we find strong evidence (a 95% confidence level) for 2012, and moderate evidence (a 90% confidence level) for 2013 and 2014. The results show that the proposed methodology serves to compare two sets of samples, Skew-Reflected-Gompertz distributed. The proposed asymptotic test is therefore useful to detect anomalies in sea surface temperature, linked to extreme events influenced by environmental conditions [11,24,25]. We encourage researchers to consider the proposed methodology for further investigations related to environmental datasets [1].
Author Contributions
J.E.C.-R. and M.M. wrote the paper and contributed reagents/analysis/materials tools; J.E.C.-R. and D.D.C. conceived, designed and performed the experiments and analyzed the data. All authors have read and approved the final manuscript.
Funding
This research received no external funding.
Acknowledgments
We are grateful to the Instituto de Fomento Pesquero (IFOP) for providing access to the data used in this work. Special thanks to Fernando Espíndola for his helpful insights and discussion on an early version of this paper. The SST datasets and R codes used in this work are available upon request to the corresponding author. The authors thank the editor and two anonymous referees for their helpful comments and suggestions.
Conflicts of Interest
The authors declare that there is no conflict of interest in the publication of this paper.
Abbreviations
The following abbreviations are used in this manuscript:
| A–D | Anderson–Darling |
| AIC | Akaike’s information criterion |
| BIC | Bayesian information criterion |
| C–V | Cramer–von Mises |
| CDF | Cumulative distribution function |
| EM | Expectation maximization |
| ESN | Epsilon-skew-normal |
| FIM | Fisher information matrix |
| GZ | Gompertz |
| K–S | Kolmogorov–Smirnov |
| KL | Kullback–Leibler |
| MGF | Moment-generating function |
| MLE | Maximum Likelihood Estimator |
| Probability density function | |
| RE | Rényi entropy |
| SD | Standard deviation |
| SE | Shannon entropy |
| SN | Skew-normal |
| SRG | Skew-Reflected-Gompertz |
| SST | Sea surface temperature |
Appendix A. The Epsilon-Skew-Normal Distribution
The epsilon-skew-normal distribution [4,27] in its location-scale version is denoted as . It can be derived from a more general class of two-piece asymmetric distributions proposed by [14], by considering the standardized normal kernel (zero mean and variance 1), denoted as , as the density f and the functions and . If , thus Z has pdf given by
where for location and scale parameters. The mean and variance of Z are
and the MGF of X is given by
where is the cdf of standardized Gaussian distribution.
Appendix B. The Skew-Normal Distribution
Let X be a skew-normal (SN, [28]) random variable denoted as . The pdf of X is given by
with . The SN model with the density (A2) is explained by its stochastic representation
where , X is represented as a linear combination of Gaussian U and a half-Gaussian variable, and and are independent (Theorem 1 of [29]). From (A3), the mean and variance of X are and , respectively.
References
- Hoseinzadeh, A.; Maleki, M.; Khodadadi, Z.; Contreras-Reyes, J.E. The Skew-Reflected-Gompertz distribution for analyzing symmetric and asymmetric data. J. Comput. Appl. Math. 2019, 349, 132–141. [Google Scholar] [CrossRef]
- Gompertz, B. On the nature of the function expressive of the law of human mortality, and on a new mode of determining the value of life contingencies. Philos. Trans. R. Soc. Lond. 1825, 115, 513–583. [Google Scholar] [CrossRef]
- Arellano-Valle, R.B.; Contreras-Reyes, J.E.; Stehlík, M. Generalized skew-normal negentropy and its application to fish condition factor time series. Entropy 2017, 19, 528. [Google Scholar] [CrossRef]
- Mudholkar, G.S.; Hutson, A.D. The epsilon-skew-normal distribution for analyzing near-normal data. J. Stat. Plan. Inference 2000, 83, 291–309. [Google Scholar] [CrossRef]
- Maleki, M.; Mahmoudi, M.R. Two-Piece Location-Scale Distributions based on Scale Mixtures of Normal family. Commun. Stat. Theor. Meth. 2017, 46, 12356–12369. [Google Scholar] [CrossRef]
- Moravveji, B.; Khodadai, Z.; Maleki, M. A Bayesian Analysis of Two-Piece distributions based on the Scale Mixtures of Normal Family. Iran. J. Sci. Technol. Trans. A 2019, 43, 991–1001. [Google Scholar] [CrossRef]
- Contreras-Reyes, J.E. Rényi entropy and complexity measure for skew-gaussian distributions and related families. Physica A 2015, 433, 84–91. [Google Scholar] [CrossRef]
- Contreras-Reyes, J.E. Analyzing fish condition factor index through skew-gaussian information theory quantifiers. Fluct. Noise Lett. 2016, 15, 1650013. [Google Scholar] [CrossRef]
- Wang, Y.Q.; Derksen, R.W. The confirmation of the α–β model and the maximum entropy formulation in a thermal wake. Environmetrics 1998, 9, 269–282. [Google Scholar] [CrossRef]
- De Queiroz, M.M.; Silva, R.W.; Loschi, R.H. Shannon entropy and Kullback–Leibler divergence in multivariate log fundamental skew-normal and related distributions. Can. J. Stat. 2016, 44, 219–237. [Google Scholar] [CrossRef]
- Di Lorenzo, E.; Combes, V.; Keister, J.E.; Strub, P.T.; Thomas, A.C.; Franks, P.J.; Ohman, M.D.; Furtado, J.C.; Bracco, A.; Bograd, S.J.; et al. Synthesis of Pacific Ocean climate and ecosystem dynamics. Oceanography 2013, 26, 68–81. [Google Scholar] [CrossRef]
- Salicrú, M.; Menéndez, M.L.; Pardo, L.; Morales, D. On the applications of divergence type measures in testing statistical hypothesis. J. Multivar. Anal. 1994, 51, 372–391. [Google Scholar] [CrossRef]
- Maleki, M.; Contreras-Reyes, J.E.; Mahmoudi, M.R. Robust Mixture Modeling Based on Two-Piece Scale Mixtures of Normal Family. Axioms 2019, 8, 38. [Google Scholar] [CrossRef]
- Arellano-Valle, R.B.; Gómez, H.W.; Quintana, F.A. Statistical inference for a general class of asymmetric distributions. J. Stat. Plan. Inference 2005, 128, 427–443. [Google Scholar] [CrossRef]
- Jafari, A.A.; Tahmasebi, S.; Alizadeh, M. The beta-Gompertz distribution. Rev. Colomb. Estad. 2014, 37, 141–158. [Google Scholar] [CrossRef]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Cover, T.M.; Thomas, J.A. Elements of Information Theory; Wiley & Son, Inc.: New York, NY, USA, 2006. [Google Scholar]
- Rényi, A. Probability Theory; Dover Publications: New York, NY, USA, 2012. [Google Scholar]
- Abu-Zinadah, H.H.; Aloufi, A.S. Some characterizations of the exponentiated Gompertz distribution. Int. Math. Forum 2014, 9, 1427–1439. [Google Scholar] [CrossRef][Green Version]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Bauckhage, C. Characterizations and Kullback–Leibler Divergence of Gompertz Distributions. arXiv 2014, arXiv:1402.3193. [Google Scholar]
- R Core Team. A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2018; ISBN 3-900051-07-0. [Google Scholar]
- Barría, P.; González, A.; Cortés, D.D.; Mora, S.; Miranda, H.; Cerna, F.; Cid, L.; Ortega, J.C. Seguimiento Pesquerías Recursos Altamente Migratorios, 2016. Convenio de Desempeño 2016; Informe Final, Subsecretaría de Economía y EMT; Instituto de Fomento Pesquero: Valparaíso, Chile, 2017. [Google Scholar]
- Alheit, J.; Bernal, P. Effects of physical and biological changes on the biomass yield of the Humboldt Current ecosystem. In Large Marine Ecosystems—Stress, Mitigation and Sustainability; American Association for the Advancement of Science: Washington, DC, USA, 1993; pp. 53–68. [Google Scholar]
- Oerder, V.; Bento, J.P.; Morales, C.E.; Hormazabal, S.; Pizarro, O. Coastal Upwelling Front Detection off Central Chile (36.5–37°S) and Spatio-Temporal Variability of Frontal Characteristics. Remote Sens. 2018, 10, 690. [Google Scholar] [CrossRef]
- Lenart, A.; Missov, T.I. Goodness-of-fit tests for the Gompertz distribution. Commun. Stat. Theor. Meth. 2016, 45, 2920–2937. [Google Scholar] [CrossRef]
- Bondon, P. Estimation of autoregressive models with epsilon-skew-normal innovations. J. Multivar. Anal. 2009, 100, 1761–1776. [Google Scholar] [CrossRef]
- Azzalini, A. A Class of Distributions which includes the Normal Ones. Scand. J. Stat. 1985, 12, 171–178. [Google Scholar]
- Henze, N. A probabilistic representation of the ‘skew-normal’ distribution. Scand. J. Stat. 1986, 13, 271–275. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).