Abstract
We consider a new kind of helicoidal surface for natural numbers in the three-dimensional Euclidean space. We study a helicoidal surface of value , which is locally isometric to a rotational surface of value . In addition, we calculate the Laplace–Beltrami operator of the rotational surface of value .
1. Introduction
The notion of the finite-type immersion of submanifolds of a Euclidean space has been used in classifying and characterizing well-known Riemannian submanifolds [1]. Chen posed the problem of classifying the finite-type surfaces in the three-dimensional Euclidean space . Then, the theory of submanifolds of a finite type was studied by many geometers [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21].
Lawson [22] gave the general definition of the Laplace–Beltrami operator in his lecture notes. Takahashi [23] stated that minimal surfaces and spheres are the only surfaces in satisfying the condition Ferrandez, Garay and Lucas [10] proved that the surfaces of satisfying , are either minimal, or an open piece of a sphere, or of a right circular cylinder. Choi and Kim [5] characterized the minimal helicoid in terms of a pointwise one-type Gauss map of the first kind.
Dillen, Pas and Verstraelen [7] proved that the only surfaces in satisfying are the minimal surfaces, the spheres and the circular cylinders. Senoussi and Bekkar [24] studied helicoidal surfaces in , which are of the finite type in the sense of Chen with respect to the fundamental forms and .
The right helicoid (resp. catenoid) is the only ruled (resp. rotational) surface that is minimal in classical surface geometry in Euclidean space. If we focus on the ruled (helicoid) and rotational characters, we see Bour’s theorem in [25]. The French mathematician Edmond Bour used the semi-geodesic coordinates and found a number of new cases of the deformation of surfaces in 1862. He also gave in [25] a well-known theorem about the helicoidal and rotational surfaces.
Kenmotsu [26] focused on the surfaces of revolution with the prescribed mean curvature. Regarding helicoidal surfaces, do Carmo and Dajczer [3] proved that, by using a result of Bour [25], there exists a two-parameter family of helicoidal surfaces isometric to a given helicoidal surface. Hitt and Roussos [27] also studied the helicoidal surfaces with constant mean curvature. Ikawa [14,15] determined pairs of surfaces by Bour’s theorem. Güler [28] also studied the isometric helicoidal and rotational surfaces of value m. Güler and Yaylı [12] focused on the generalized Bour’s theorem in three-space.
We consider a new kind of helicoidal surface of value in Euclidean three-space in this paper. We give some basic notions of the three-dimensional Euclidean geometry in Section 2. In Section 3, we give the definition of a helicoidal surface of value and obtain isometric helicoidal and rotational surfaces of value (resp. of value in Section 4) via Bour’s theorem. We also calculate the mean curvature and the Gaussian curvature of the rotational surface of value in Section 4. Moreover, in Section 5, we calculate the Laplace–Beltrami operator of the rotational surface of value . Finally, we give the rotational surface satisfying in in the last section.
2. Preliminaries
We shall identify a vector (a,b,c) with its transpose. In this section, we will obtain the rotational and helicoidal surfaces in . The reader can find basic elements of differential geometry in [29,30].
We define the rotational surface and helicoidal surface in . For an open interval , let be a curve in a plane , and let ℓ be a straight line in . A rotational surface in is defined as a surface rotating the curve around the line ℓ (these are called the profile curve and the axis, respectively). Suppose that when a profile curve rotates around the axis ℓ, it simultaneously displaces parallel lines orthogonal to the axis ℓ, so that the speed of displacement is proportional to the speed of rotation. Then, the resulting surface is called the helicoidal surface with axis ℓ and pitch .
Let ℓ be the line spanned by the vector . The orthogonal matrix that fixes the above vector is given by
The matrix M is found by solving the following equations: simultaneously. When the axis of rotation is ℓ, there is a Euclidean transformation by which the axis is ℓ transformed to the z-axis of . The profile curve is given by where is a differentiable function for all . A helicoidal surface in three-dimensional Euclidean space which is spanned by the vector with pitch a is as follows
When , the helicoidal surface is just a rotational surface.
3. Helicoidal Surfaces of Value (m,n)
We define a new type of helicoidal surface. Using Bour’s theorem on the helicoidal surface, we obtain an isometric rotational surface in this section.
Definition 1.
A helicoidal surface of value is given by
where the rotating matrices and are
and
is the rotating axis, and the profile curves are
in in and the pitch Since the helicoidal surface is given by rotating the profile curves γ around the axis ℓ and simultaneously displacing parallel lines orthogonal to the axis ℓ, the speed of displacement is proportional to the speed of rotation.
Next, we give a theorem about locally isometric helicoidal-rotational surfaces of value
Theorem 1.
A helicoidal surface of value
is isometric to the rotational surface of value
by Bour’s theorem, where
and the pitch
Proof.
The line element of the the helicoidal surface is
Helices in are curves defined by Therefore curves in that are orthogonal to helices supply the orthogonality condition F Thus, we obtain where c is constant. Hence, if we put then curves orthogonal to helices are given by Substituting the equation into the line element (4), we have
where Setting (5) becomes
The rotational surface (3) has the line element
where
Again, setting then (7) becomes
Comparing (6) with (8), if we take then we have an isometry between and . Therefore, it follows that
Substituting the equation
into (9), we get the function ☐
4. Helicoidal Surface of Value (0,1)
We give the helicoidal surface of value using Bour’s theorem in this section.
Proposition 1.
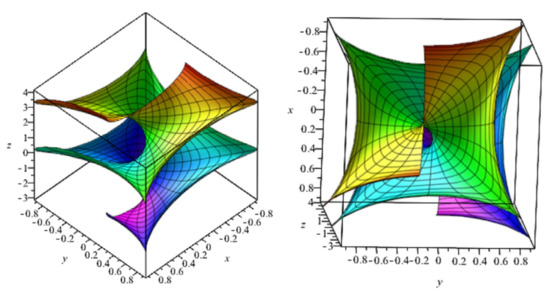
A helicoidal surface of value : (see Figure 1)
is isometric to the rotational surface of value
where
Figure 1.
Two views of the helicoidal surface of value .
Proof.
Taking in the previous theorem, we easily get the results. ☐
Corollary 1.
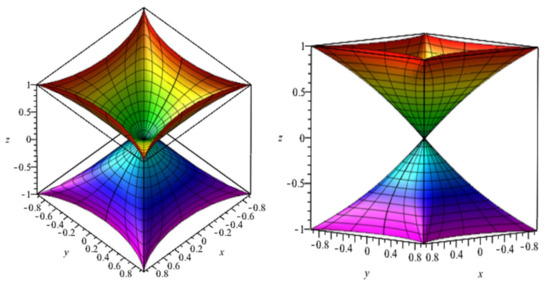
When in (10), we obtain a rotational surface of value (see Figure 2).
Figure 2.
Two views of the rotational surface of value .
Corollary 2.
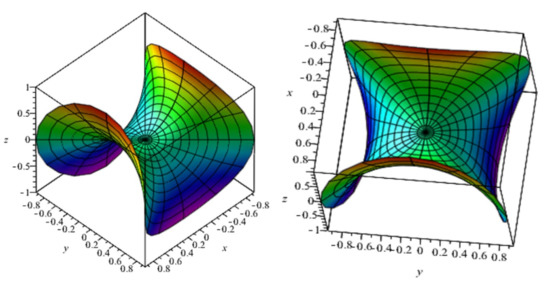
When and in (10), we have Enneper’s minimal surface (see Figure 3).
Figure 3.
Two views of the Enneper minimal surface of value .
Proposition 2.
Proof.
Taking the differential with respect to to we have
and
The coefficients of the first fundamental form of the surface are
Then, we get
Using the second differentials
and the Gauss map (the unit normal)
of the surface , we have the coefficients of the second fundamental form of the surface as follows
Therefore, we can see the results easily. ☐
Corollary 3.
If the helicoidal surface of value is minimal, then we get the differential equation as follows
The helicoidal surface of value is the same surface for value three in [28].
5. Laplace–Beltrami Operator
The Laplace–Beltrami operator of a smooth function of class with respect to the first fundamental form of surface is the operator , which is defined as follows
where and Clearly, we write as follows
Using a more transparent notation, we get
where
Now, we consider the rotational surface
The first fundamental matrix of the surface is as follows
The inverse matrix of I is as follows
where
The Laplace–Beltrami operator of a rotational surface is given by
where
Then, we obtain the following results
Using differentials of on respectively, we get
where
Remark 1.
When the rotational surface has the equation we have to solve the system of equations as follows
here, finding the function φ is a problem.
Corollary 4.
When then we get
6. Rotational Surface Satisfying in 𝔼3
Theorem 2.
Let : ⟶ be an isometric immersion given by (15). Then, if and only if has zero mean curvature.
Proof.
The Gauss map of the rotational surface is
where
We use
where is a matrix. The equation by means of
and give rise to the following system of ODEs
where Differentiating the ODEs with respect to we have
From (17), we get
here, cos and sin are linearly independent functions of , then we have that . From , we obtain . Finally, is a minimal rotational hypersurface. ☐
Author Contributions
The author gave the idea for the isometric deformation problem of an -type helicoidal surface in three-space. Then, he checked and polished the draft.
Funding
This research received no external funding.
Conflicts of Interest
The author declares that there is no conflict of interest regarding the publication of this paper.
References
- Chen, B.Y. Total Mean Curvature and Submanifolds of Finite Type; World Scientific: Singapore, 1984. [Google Scholar]
- Arslan, K.; Kılıç Bayram, B.; Bulca, B.; Öztürk, G. Generalized Rotation Surfaces in 𝔼4. Results Math. 2012, 61, 315–327. [Google Scholar] [CrossRef]
- Do Carmo, M.; Dajczer, M. Helicoidal surfaces with constant mean curvature. Tohoku Math. J. 1982, 34, 351–367. [Google Scholar] [CrossRef]
- Chen, B.Y.; Choi, M.; Kim, Y.H. Surfaces of revolution with pointwise 1-type Gauss map. Korean Math. Soc. 2005, 42, 447–455. [Google Scholar] [CrossRef]
- Choi, M.; Kim, Y.H. Characterization of the helicoid as ruled surfaces with pointwise 1-type Gauss map. Bull. Korean Math. Soc. 2001, 38, 753–761. [Google Scholar]
- Choi, M.; Yoon, D.W. Helicoidal surfaces of the third fundamental form in Minkowski 3-space. Bull. Korean Math. Soc. 2015, 52, 1569–1578. [Google Scholar] [CrossRef]
- Dillen, F.; Pas, J.; Verstraelen, L. On surfaces of finite type in Euclidean 3-space. Kodai Math. J. 1990, 13, 10–21. [Google Scholar] [CrossRef]
- Dursun, U.; Turgay, N.C. Minimal and pseudo-umbilical rotational surfaces in Euclidean space 𝔼4. Mediterr. J. Math. 2013, 10, 497–506. [Google Scholar] [CrossRef]
- Kim, Y.H.; Turgay, N.C. Surfaces in 𝔼3 with L1-pointwise 1-type Gauss map. Bull. Korean Math. Soc. 2013, 50, 935–949. [Google Scholar] [CrossRef]
- Ferrandez, A.; Garay, O.J.; Lucas, P. On a Certain Class of Conformally at Euclidean Hypersurfaces. In Global Analysis and Global Differential Geometry; Springer: Berlin, Germany, 1990; pp. 48–54. [Google Scholar]
- Güler, E.; Turgut Vanlı, A. Bour’s theorem in Minkowski 3-space. J. Math. Kyoto Univ. 2006, 46, 47–63. [Google Scholar] [CrossRef]
- Güler, E.; Yaylı, Y. Generalized Bour theorem. Kuwait J. Sci. 2015, 42, 79–90. [Google Scholar]
- Güler, E.; Yaylı, Y.; Hacı salihoğlu, H.H. Bour’s theorem on the Gauss map in 3-Euclidean space. Hacettepe J. Math. Stat. 2010, 39, 515–525. [Google Scholar]
- Ikawa, T. Bour’s theorem and Gauss map. Yokohama Math. J. 2000, 48, 173–180. [Google Scholar]
- Ikawa, T. Bour’s theorem in Minkowski geometry. Tokyo J. Math. 2001, 24, 377–394. [Google Scholar] [CrossRef]
- Ji, F.; Kim, Y.H. Mean curvatures and Gauss maps of a pair of isometric helicoidal and rotation surfaces in Minkowski 3-space. J. Math. Anal. Appl. 2010, 368, 623–635. [Google Scholar] [CrossRef]
- Ji, F.; Kim, Y.H. Isometries between minimal helicoidal surfaces and rotation surfaces in Minkowski space. Appl. Math. Comput. 2013, 220, 1–11. [Google Scholar] [CrossRef]
- The Hieu, D.; Ngoc Thang, N. Bour’s theorem in 4-dimensional Euclidean space. Bull. Korean Math. Soc. 2017, 54, 2081–2089. [Google Scholar]
- Ganchev, G.; Milousheva, V. General rotational surfaces in the 4-dimensional Minkowski space. Turk. J. Math. 2014, 38, 883–895. [Google Scholar] [CrossRef]
- Güler, E.; Magid, M.; Yaylı, Y. Laplace Beltrami operator of a helicoidal hypersurface in four space. J. Geom. Sym. Phys. 2016, 41, 77–95. [Google Scholar] [CrossRef]
- Güler, E.; Hacısalihoğlu, H.H.; Kim, Y.H. The Gauss Map and the third Laplace–Beltrami operator of the rotational hypersurface in 4-Space. Symmetry 2018, 10, 398. [Google Scholar] [CrossRef]
- Lawson, H.B. Lectures on Minimal Submanifolds, 2nd ed.; Mathematics Lecture Series, 9; Publish or Perish, Inc.: Wilmington, NC, USA, 1980; Volume I. [Google Scholar]
- Takahashi, T. Minimal immersions of Riemannian manifolds. J. Math. Soc. Jpn. 1966, 18, 380–385. [Google Scholar] [CrossRef]
- Senoussi, B.; Bekkar, M. Helicoidal surfaces with ΔJr = Ar in 3-dimensional Euclidean space. Stud. Univ. Babeş-Bolyai Math. 2015, 60, 437–448. [Google Scholar]
- Bour, E. Théorie de la déformation des surfaces. J. Êcole Imperiale Polytech. 1862, 22–39, 1–148. [Google Scholar]
- Kenmotsu, K. Surfaces of revolution with prescribed mean curvature. Tohôku Math. J. 1980, 32, 147–153. [Google Scholar] [CrossRef]
- Hitt, L.; Roussos, I. Computer graphics of helicoidal surfaces with constant mean curvature. An. Acad. Brasil. Ciênc. 1991, 63, 211–228. [Google Scholar]
- Güler, E. A new kind helicoidal surface of value m. Int. Elec. J. Geom. 2014, 7, 154–162. [Google Scholar]
- Eisenhart, L. A Treatise on the Differential Geometry of Curves and Surfaces; Palermo 41 Ginn and Company: Orland, MA, USA, 1909. [Google Scholar]
- Spivac, M. A Comprehensive Introduction to Differential Geometry III; Interscience: New York, NY, USA, 1969. [Google Scholar]
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).