
Stress Estimation in Viscous Flows Using an Iterative Tikhonov Regularized Stokes Inverse Model

Abstract
1. Introduction
2. Stokes Inverse Model (SIM) Formulation
3. Existence, Uniqueness and Error Estimation
3.1. Existence and Uniqueness of the Solution for the Stokes Inverse Problem
3.2. Convergence Analysis for the Stokes Inverse Model
3.3. Error Estimation for the Perturbed Data
4. Numerical Approach
4.1. Variational Formulation
4.2. Finite Element Approximation
5. Stoke Inverse Model Validation
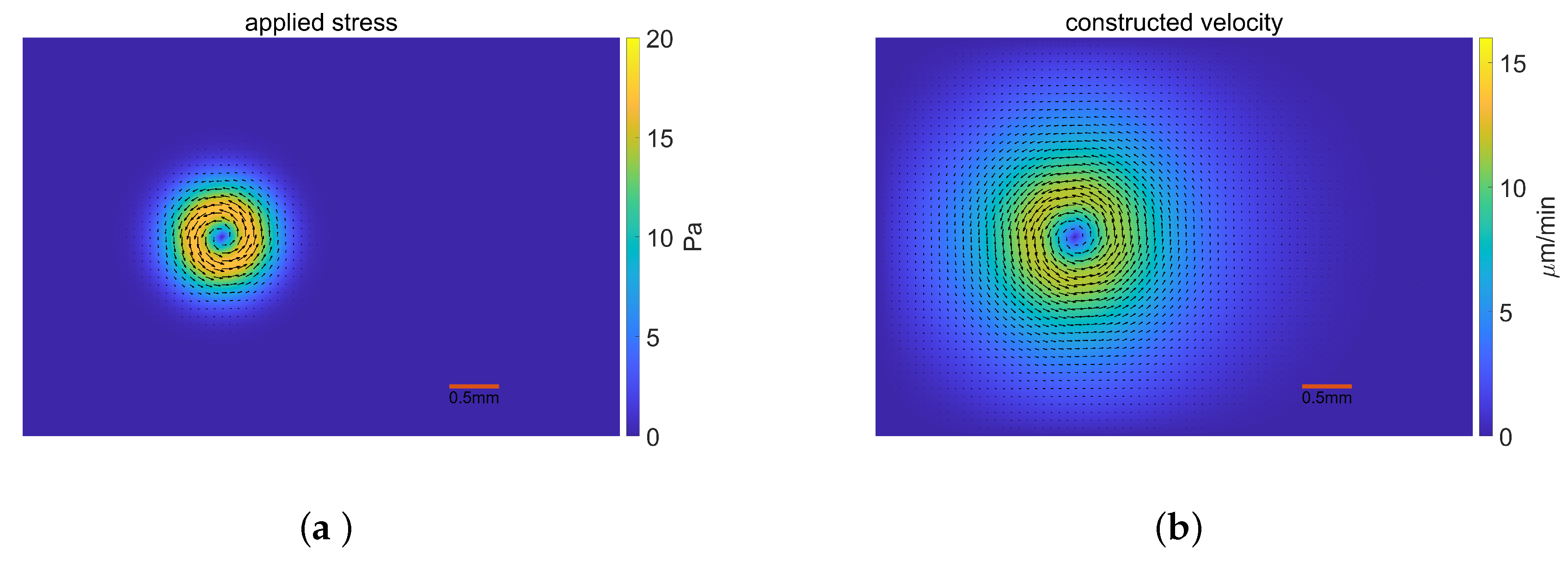
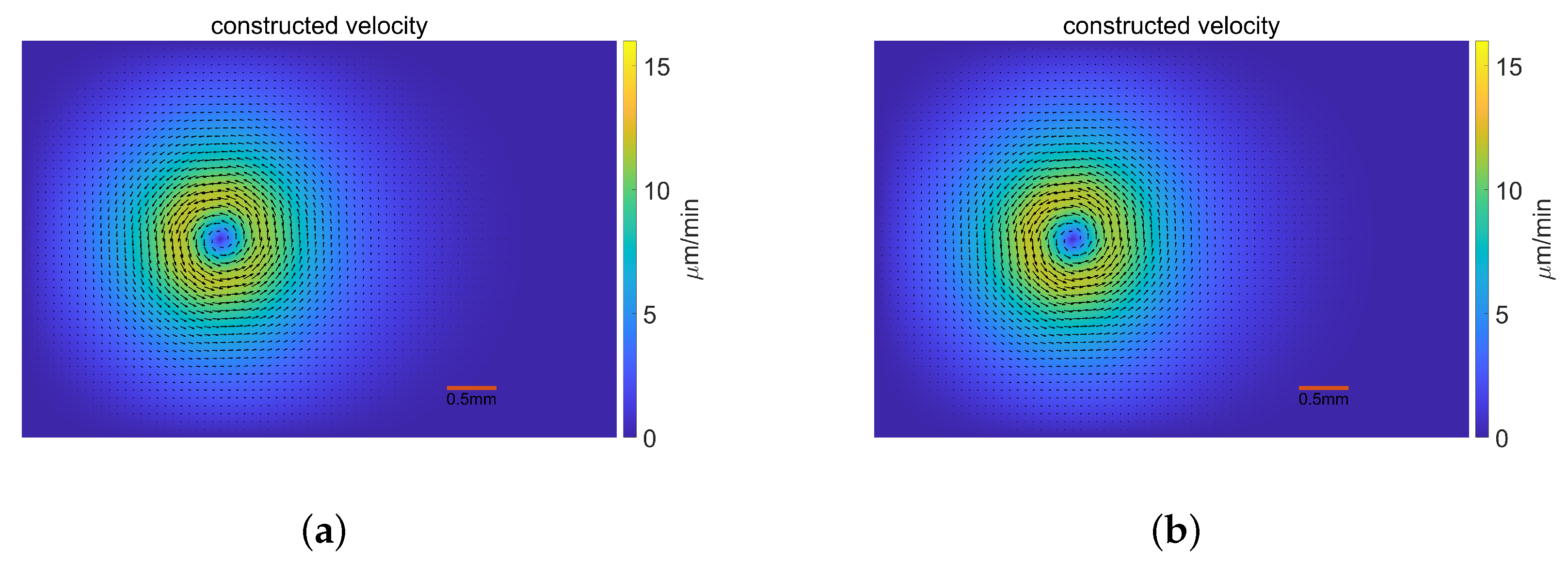
5.1. Velocity Construction
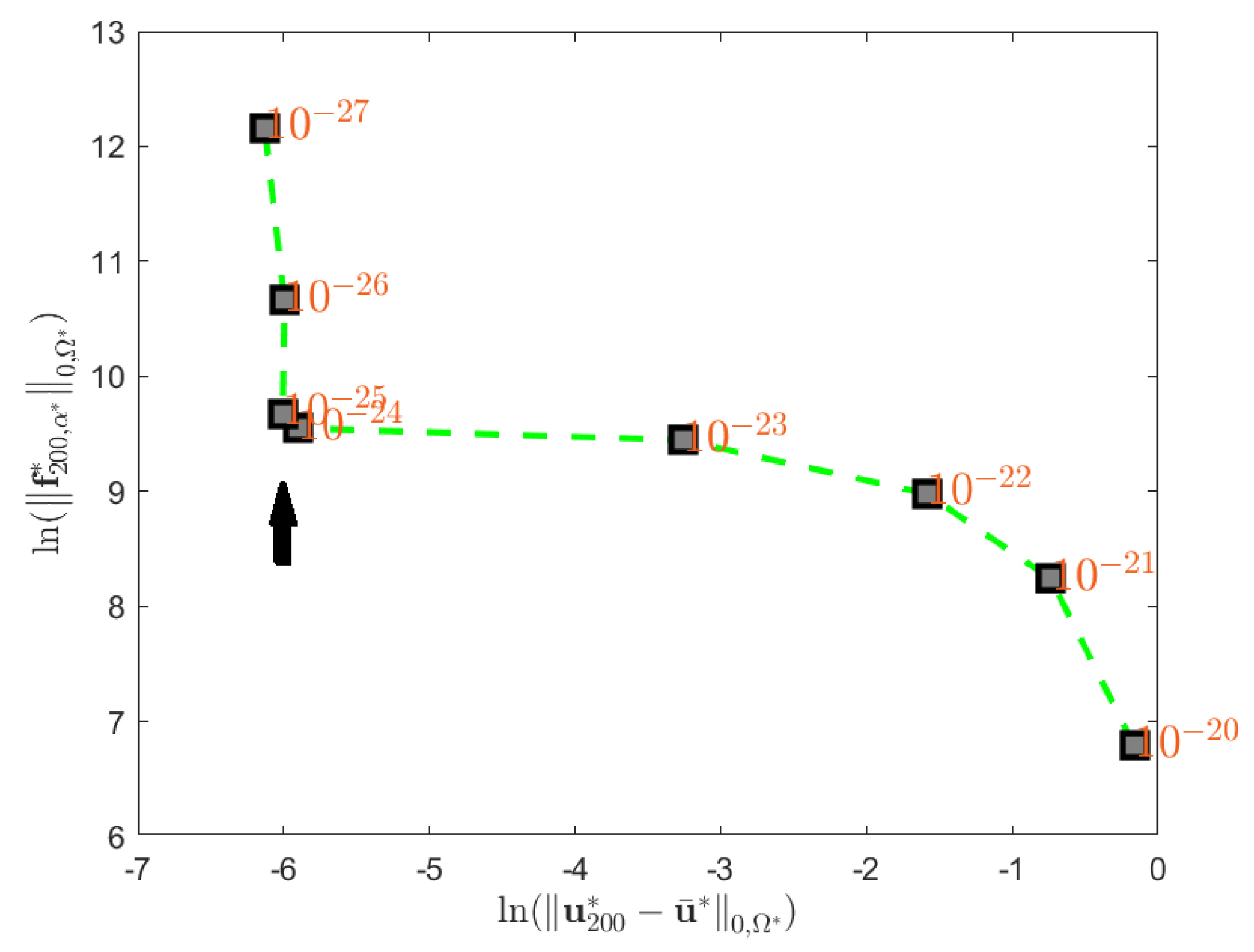
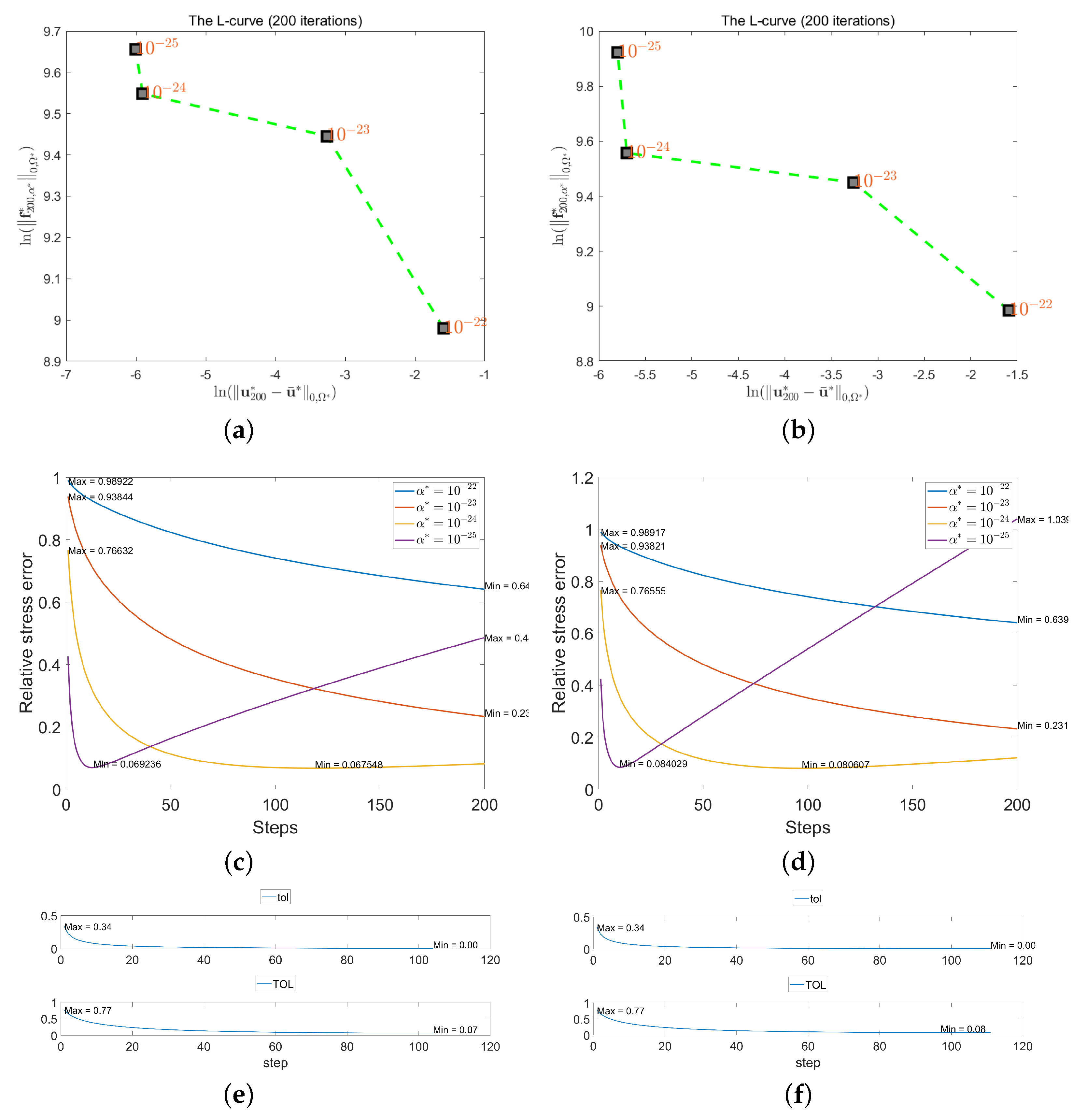
5.2. Determination of the Regularization Parameter
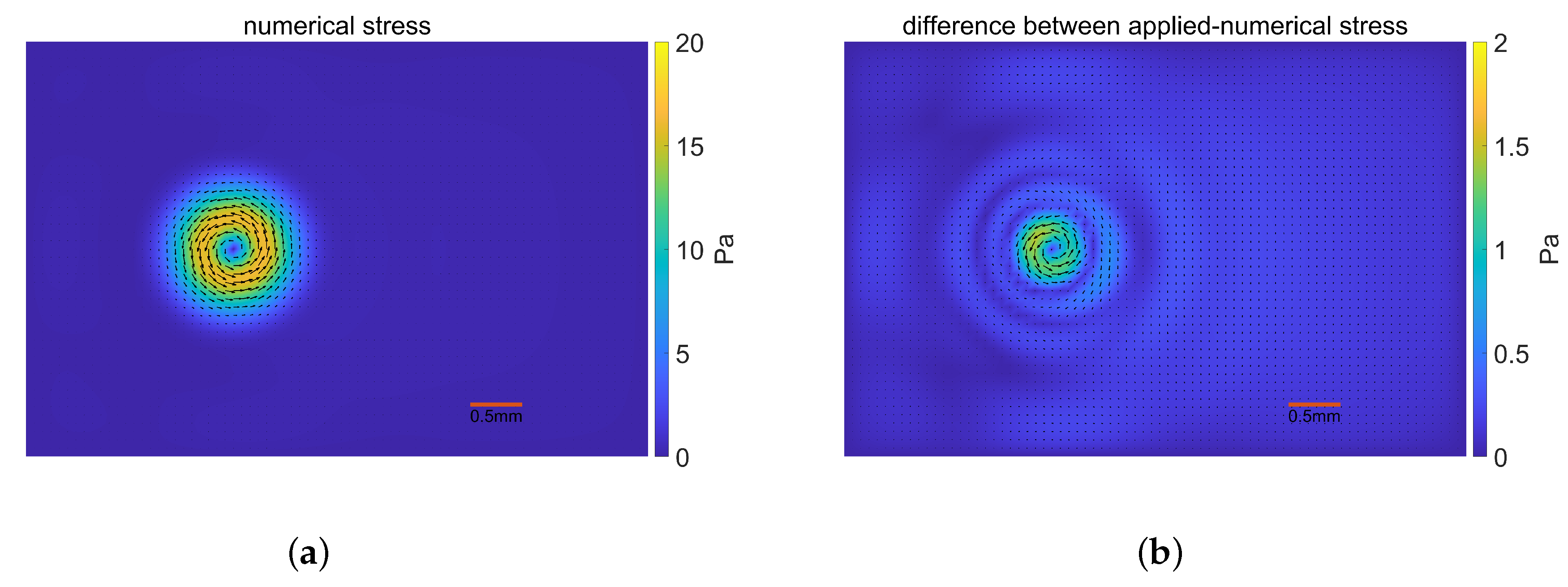
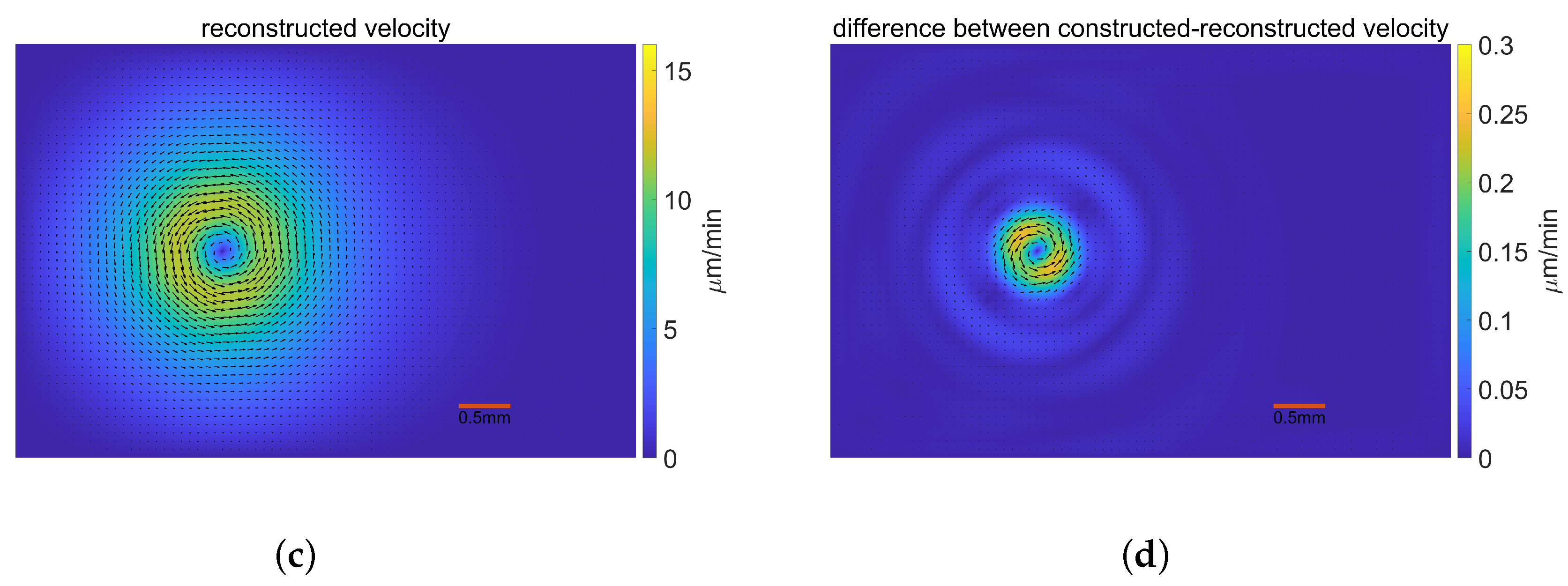
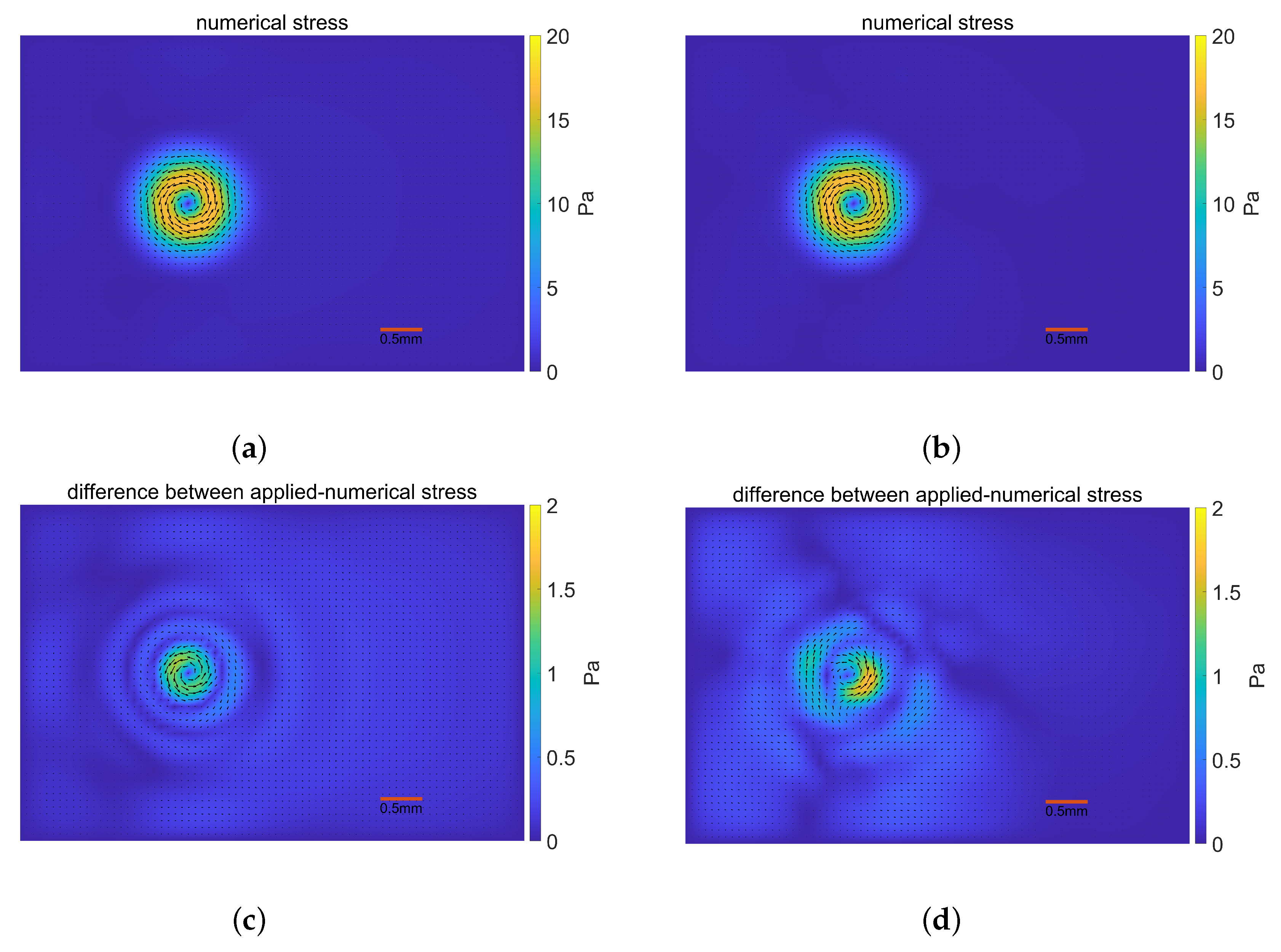
5.3. Model Validation Results
5.4. Model Validation for Perturbed Velocities
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lekka, M.; Gnanachandran, K.; Kubiak, A.; Zieliński, T.; Zemła, J. Traction force microscopy—Measuring the forces exerted by cells. Micron 2021, 150, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Rothenberger, S.M.; Brindise, M.C.; Markl, M.; Rayz, V.L.; Vlachos, P.P. Wall Shear Stress Estimation for 4D Flow MRI Using Navier-Stokes Equation Correction. Ann. Biomed. Eng. 2022, 50, 1810–1825. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Raiola, M.; Discetti, S. Pressure from data-driven estimation of velocity fields using snapshot PIV and fast probes. Exp. Therm. Fluid Sci. 2022, 136, 1–13. [Google Scholar] [CrossRef]
- Kabanikhin, S. Definitions and examples of inverse and ill-posed problems. J. Inverse -Ill-Posed Probl. 2008, 16, 317–357. [Google Scholar] [CrossRef]
- Kirsch, A. An Introduction to the Mathematical Theory of Inverse Problems; Springer: Cham, Switzerland, 1996. [Google Scholar]
- Siraj-ul-Islam; Ahsan, M.; Hussian, I. A multi-resolution collocation procedure for time-dependent inverse heat problems. Int. J. Therm. Sci. 2018, 128, 160–174. [Google Scholar] [CrossRef]
- Tikhonov, A.N. On the solution of ill-posed problems and the method of regularization. Dokl. Akad. Nauk. Sssr 1963, 151, 501–504. [Google Scholar]
- Li, M.; Wang, L.; Luo, C.; Wu, H. A new improved fractional Tikhonov regularization method for moving force identification. Structures 2024, 60, 1–15. [Google Scholar] [CrossRef]
- Lauga, E.; Powers, T.R. The Hydrodynamics of Swimming Microorganisms. Rep. Prog. Phys. 2009, 72, 1–52. [Google Scholar] [CrossRef]
- Nashed, M.Z. The theory of Tikhonov regularization for Fredholm equations of the first kind (C. W. Groetsch). Siam Rev. 1986, 28, 116–118. [Google Scholar] [CrossRef]
- Kryanev, A.V. An iterative method for solving incorrectly posed problems. Ussr Comput. Math. Math. Phys. 1974, 14, 24–35. [Google Scholar] [CrossRef]
- Engl, H.W.; Hanke, M.; Neubauer, A. Regularization of Inverse Problems; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1996. [Google Scholar]
- Vainikko, G.M.; Veretennikov, A.Y. Iteration Procedures in Ill-Posed Problems; Nauka: Moscow, Russia, 1986. [Google Scholar]
- Gerth, D. A new interpretation of (Tikhonov) regularization. Inverse Probl. 2021, 37. [Google Scholar] [CrossRef]
- Hanke, M.; Groetsch, C. Nonstationary iterated Tikhonov regularization. J. Optim. Theory Appl. 1998, 98, 37–53. [Google Scholar] [CrossRef]
- Chang, W.; D’Ascenzo, N.; Xie, Q. A relaxed iterated tikhonov regularization for linear ill-posed inverse problems. J. Math. Anal. Appl. 2024, 530. [Google Scholar] [CrossRef]
- White, F.M.; Hess, J.L.; Gibson, C.H. Equations for Fluid Statics and Dynamics. In Handbook of Fluid Dynamics and Fluid Machinery; Wiley: Hoboken, NJ, USA, 1996; pp. 1–90. [Google Scholar]
- Nakayama, Y. Chapter 10—dimensional analysis and law of similarity. In Introduction to Fluid Mechanics, 2nd ed.; Butterworth-Heinemann: Oxford, UK, 2018; pp. 203–214. [Google Scholar]
- Durbin, P.A.; Medic, G. Creeping flow. In Fluid Dynamics with a Computational Perspective; Cambridge University Press: Cambridge, UK, 2007; pp. 108–131. [Google Scholar]
- Mathé, P.; Hofmann, B. How general are general source conditions? Inverse Probl. 1993, 24, 015009. [Google Scholar]
- Temam, R. Une méthode d’approximation de la solution des équations de navier-stokes. Bull. Soc. Math. Fr. 1968, 96, 115–152. [Google Scholar] [CrossRef]
- Lin, P. A sequential regularization method for time-dependent incompressible navier-stokes equations. Siam J. Numer. Anal. 1997, 34, 1051–1071. [Google Scholar] [CrossRef]
- Hecht, F. New development in freefem++. J. Numer. Math. 2012, 20, 251–265. [Google Scholar] [CrossRef]
- Gao, Y. Developing Stokes Inverse Models that Estimate Stresses Driving Tissue Flows during Gastrulation in Chick Embryos; University of Dundee: Dundee, UK, 2023. [Google Scholar]
- Hansen, P.C. Rank-Deficient and Discrete Ill-Posed Problems: Numerical Aspects of Linear Inversion; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 1998. [Google Scholar]
- Morozov, V.A. Regularization of incorrectly posed problems and the choice of regularization parameter. Ussr Comput. Math. Math. Phys. 1966, 6, 242–251. [Google Scholar] [CrossRef]
- Engl, H.W. Discrepancy principles for Tikhonov regularization of ill-posed problems leading to optimal convergence rates. J. Optim. Theory Appl. 1987, 52, 209–215. [Google Scholar] [CrossRef]
- Bakushinskii, A.B. Remarks on choosing a regularization parameter using the quasi-optimality and ratio criterion. USSR Comput. Math. Math. Phys. 1984, 24, 181–182. [Google Scholar] [CrossRef]
- Fenu, C.; Reichel, L.; Rodriguez, G. GCV for Tikhonov regularization via global Golub–Kahan decomposition. Numer. Linear Algebra Appl. 2016, 23, 467–484. [Google Scholar] [CrossRef]
- Hansen, P.C. Analysis of discrete ill-posed problems by means of the L-curve. Siam Rev. 1992, 34, 561–580. [Google Scholar] [CrossRef]
- Lawson, C.L.; Hanson, R.J. Solving Least Squares Problems; Prentice-Hall: Hoboken, NJ, USA, 1974. [Google Scholar]
- Hansen, P.C.; O’Leary, D.P. The use of the L-curve in the regularization of discrete ill-posed problems. Siam J. Sci. Comput. 1993, 14, 1487–1503. [Google Scholar] [CrossRef]
- Hanke, M. Limitations of the L-curve method in ill-posed problems. Bit Numer. Math. 1996, 36, 287–301. [Google Scholar] [CrossRef]
- Rezghi, M.; Hosseini, S.M. A new variant of L-curve for Tikhonov regularization. J. Comput. Appl. Math. 2009, 231, 914–924. [Google Scholar] [CrossRef]
- Xu, Y.; Pei, Y.; Dong, F. An extended L-curve method for choosing a regularization parameter in electrical resistance tomography. Meas. Sci. Technol. 2016, 27, 1–6. [Google Scholar] [CrossRef]
- Yu, D.; Hwang, C.; Zhu, H.; Ge, S. The Tikhonov-L-curve regularization method for determining the best geoid gradients from SWOT altimetry. J. Geod. 2023, 97, 1–13. [Google Scholar] [CrossRef]
- Calvetti, D.S.; Morigi, S.; Reichel, L.; Sgallari, F. Tikhonov regularization and the L-curve for large discrete ill-posed problems. J. Comput. Appl. Math. 2000, 123, 423–446. [Google Scholar] [CrossRef]
- Johnston, P.R.; Gulrajani, R.M. Selecting the corner in the L-curve approach to Tikhonov regularization. IEEE Trans. Biomed. Eng. 2000, 47, 1293–1296. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic Variables | Description | Primary Units |
|---|---|---|
| L | Characteristic length | |
| U | Characteristic velocity | |
| Characteristic force | ||
| Characteristic pressure | ||
| Characteristic regularization parameter |
| Noise Level | Proper | Iterations | Stress Error | Numerical Velocity Error | Reconstructed Velocity Error |
|---|---|---|---|---|---|
| 7 | |||||
| 12 |
| Noise Level | Proper | Iterations | Stress Error | Numerical Velocity Error | Reconstructed Velocity Error |
|---|---|---|---|---|---|
| 104 | |||||
| 111 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Wang, Y.; Zhang, J. Stress Estimation in Viscous Flows Using an Iterative Tikhonov Regularized Stokes Inverse Model. Mathematics 2025, 13, 1884. https://doi.org/10.3390/math13111884
Gao Y, Wang Y, Zhang J. Stress Estimation in Viscous Flows Using an Iterative Tikhonov Regularized Stokes Inverse Model. Mathematics. 2025; 13(11):1884. https://doi.org/10.3390/math13111884
Chicago/Turabian StyleGao, Yuanhao, Yang Wang, and Jizhou Zhang. 2025. "Stress Estimation in Viscous Flows Using an Iterative Tikhonov Regularized Stokes Inverse Model" Mathematics 13, no. 11: 1884. https://doi.org/10.3390/math13111884
APA StyleGao, Y., Wang, Y., & Zhang, J. (2025). Stress Estimation in Viscous Flows Using an Iterative Tikhonov Regularized Stokes Inverse Model. Mathematics, 13(11), 1884. https://doi.org/10.3390/math13111884