Abstract
In this paper, we introduce a modified form of the G-variational inequality problem, called the combination of G-variational inequalities problem, within a Hilbert space structured by graphs. Furthermore, we develop an iterative scheme to find a common element between the set of fixed points of a G-nonexpansive mapping and the solution set of the proposed G-variational inequality problem. Under appropriate assumptions, we establish a strong convergence theorem within the framework of a Hilbert space endowed with graphs. Additionally, we present the concept of the G-minimization problem, which diverges from the conventional minimization problem. Applying our main results, we demonstrate a strong convergence theorem for the G-minimization problem. Finally, we provide illustrative examples to validate and support our theoretical findings.
Keywords:
the combination of G-variational inequality problems; fixed point problem; G-inverse strongly monotone mapping MSC:
47H09; 47H10; 90C99
1. Introduction
In this study, we explore the intersection of graph theory and functional analysis by considering a nonempty closed convex subset C within a real Hilbert space H, with the inner product . Let be a nonlinear mapping. A point is called a fixed point of T if . The set of fixed points of T is the set . Throughout this paper, we define the inverse function from H to C by . We utilize a directed graph , where represents the vertices and the edges, under the assumption that G has no parallel edges. The inverse graph , obtained by reversing the direction of each edge, is defined formally as
For vertices x and y in G, a path from x to y of length is a sequence of vertices such that , , and for . A graph G is termed connected if a directed path exists between any two vertices.
A set is defined as a dominating set if for every vertex , there exists a vertex such that . In this context, we say that x dominates v, or equivalently, v is dominated by x.
Fixed point theorems, an essential component of nonlinear analysis, find extensive applications in mathematics and various applied sciences. Researchers often utilize these theorems to approximate solutions to fixed point problems associated with nonlinear mappings. Furthermore, these methods extend to other domains, such as variational inequality problems and equilibrium problems, which are well documented in the literature [1,2,3].
The classical variational inequality problem (VIP) is to find a point such that
where A is a mapping from C to H. The set of the solutions of VIP, denoted by , has been extensively studied due to its diverse applications in optimization, control problems, and economics. Many researchers have investigated this problem, resulting in significant theoretical advancements and the development of efficient numerical methods. See [4,5,6,7].
Jachymski pioneered the integration of graph structures into fixed point theory within metric spaces. He introduced the concept of G-contraction, providing a generalization of the Banach contraction principle for single-valued G-contractions, as articulated in Definition 1.
Definition 1
([8]). Let be a metric space and let be a directed graph such that and contain loops, i.e., . A mapping is termed a G-contraction if it preserves edges of G, i.e.,
and there exists such that for any ,
In recent years, the concept of G-contraction has been refined and extended by numerous authors (see [8] and references cited therein). Consider C, a nonempty convex subset of a Banach space, and , a directed graph where . A mapping is referred to as G-nonexpansive if the following conditions are satisfied. (1) T is edge-preserving, i.e., for any such that , then ; and (2) , whenever for all .
This concept was introduced by Tiammee et al. [9] in 2015. They also presented Property G (see more details in the Preliminaries) and proposed the following Halpern iteration process for approximating the fixed points of G-nonexpansive mappings in Hilbert spaces endowed with a directed graph structure. Suppose C satisfies Property G. Let be a sequence defined by the iteration:
where and is a G-nonexpansive mapping. If the sequence is dominated by and in turn dominates , then converges strongly to under appropriate control conditions.
In 2017, Kangtunyakarn [10] introduced the G-S-mapping and a Halpern iteration process for solving the fixed point problem of a finite family of G-nonexpansive mappings in Hilbert spaces with graphs. Let be generated by and
where and S is a G-S-mapping. The sequence converges strongly to a point in under suitable conditions. During the last few years, there has been significant progress in developing iterative methods for solving the fixed point problem of G-nonexpansive mappings; for further details, see [11,12,13,14,15,16] and the references therein.
The variational inequality problem seeks a point such that
where are mappings. This problem, introduced by Kangtunyakarn [17], reduces to the standard variational inequality problem (1) when . This formulation has significant applications in economics, finance, engineering, optimization, and game theory [2,18,19,20].
Recently, Kangtunyakarn [21] introduced the concept of G-variational inequality problems, which differ from classical variational inequality problems in Hilbert spaces:
Definition 2
([21]). Let C be a nonempty closed convex subset of a real Hilbert H and let be a directed graph with . The G-variational inequality problems is to find a point such that
for all with and is a mapping. The set of all the solutions of (5) is denoted by .
Moreover, he introduced a Halpern iteration for solving G-variational inequality problems and the fixed point problem of a G-nonexpansive mapping in Hilbert spaces with graphs. Let be a sequence generated by and defined by
where , , and are sequences in such that and lies within the interval . The mapping is a G-nonexpansive mapping, and is a G--inverse strongly monotone operator with . Under appropriate conditions, the sequence converges strongly to a solution of the algorithm (5) in Hilbert spaces endowed with graphs.
Building on Definition 2 and the variational inequality problem, we introduce the combination of G-variational inequality problem, which seeks a point such that
for all with and are mappings. The set of all the solutions of (7) is denoted by . If , it reduces to the G-variational inequality problem.
We present the following example to illustrate that the combination of the G-variational inequality problem is distinct from the standard variational inequality problem:
Example 1.
Let define by for all and , respectively.
Let and , where and . Then, but .
In this paper, motivated by the Definition 2 in [17] and Kangtunyakarn [21], we introduce a new combination of the G-variational inequality problem (7). We also propose a modified method, inspired by Kangtunyakarn [21], for solving problem (7) and the fixed point problem of G-nonexpansive mappings. Furthermore, we establish a strong convergence theorem to solve the combination of the G-variational inequality problem and the fixed point problem for G-nonexpansive mappings in a Hilbert space endowed with a graph structure. Additionally, we apply our main theorem to address the G-minimization problem, which involves finding a point in the convex set C that minimizes a certain objective function while respecting the graph structure imposed by G. This application illustrates the utility of our results in optimization contexts where graph-based constraints are significant.
Moreover, we present examples demonstrating the effectiveness of our approach, particularly in differentiating between G-variational inequality problems and standard variational inequality problems. These examples highlight the necessity of considering the graph structure when dealing with complex systems, where the relationships between elements (as represented by the graph’s edges) critically influence the problem’s solution.
Our findings extend existing theories in nonlinear analysis and provide new tools for tackling variational inequality and fixed point problems in settings where the underlying structure can be naturally represented by a graph. This work not only broadens the scope of potential applications in mathematics and applied sciences but also opens up new avenues for future research in areas such as network theory, optimization, and computational mathematics.
2. Preliminaries
In this section, we present essential definitions and lemmas that will be utilized in the subsequent analysis. Additionally, we introduce new lemmas that serve as crucial tools for proving our main results.
For every point , there exists a unique point in C such that
where . The mapping defined by is called metric projection onto C.
The following lemma highlights a fundamental property of the metric projection .
Lemma 1
([22]). Let and . Then, if and only if there holds the inequality
The next definitions and lemmas are vital for proving the strong convergence theorem in a Hilbert space endowed with a directed graph.
Definition 3
([9]). Let be a directed graph. A graph G is called transitive if for any with and are in , then .
The following property is crucial in proving the main result, as it facilitates the selection of an appropriate subsequence and ensures conditions related to the connectivity of the graph G. Consequently, it supports the convergence of the sequence in the proof.
Property G [9] Let C be a nonempty subset of a normed space X and let , where be a directed graph then C is said to have Property G if every sequence in C converging weakly to , there exists a subsequence of such that for all .
Definition 4
([21]). Let C be a nonempty closed convex subset of a real Hilbert space H and let be a directed graph with . The mapping is said to be -inverse strongly monotone (shortly, α-GISM) if there exists such that
for all with .
Lemma 2
([21]). Let C be a nonempty closed convex subset of a Hilbert space H and let be a directed graph with . Let is convex and G is transitive with and let be α-GISM operator with . Then, , for all .
The following lemma is essential for proving the main result. In establishing this lemma, Kangtunyakarn [21] utilized Property G as a fundamental component of the proof.
Lemma 3
([21]). Let H be a Hilbert space and C be a nonempty closed convex subset of H with C having a property G. Let be a directed graph where and is a convex set. Let be α-GISM mapping with for all . Then, is closed and convex.
Lemma 4
([9]). Let X be a normed space and C be a subset of X having Property G. Let be a directed graph such that and is convex. Suppose is a G-nonexpansive mapping and Then is closed and convex.
The following lemma establishes a critical connection between the solution set of the combination of the G-variational inequalities problem, the zero mapping, and the fixed point problem in a Hilbert space endowed with a graph.
Lemma 5.
Let C be a nonempty closed convex subset of Hilbert space H and let be a directed graph with . Let is convex and G is transitive with and let be α-GISM and β-GISM mappings with , respectively. Let . Then, , for all .
Proof.
Let and with
Since , we have
for all with
From the definition of , we have . As a consequence, we have
Let and .
From the definition of , we have
for all with
From (8) and , we have .
It follows that
for all with
Since and , we have .
Since and G is transitive, we have .
From , definitions of and (9), we have
So, we have It follows that .
From and is a nonexpansive mapping, we have
So, we have .
Therefore, it concludes that
Let and with
From Lemma 1, we have
It implies that
for all and
From (7), we have .
Since , we have .
Therefore, it concludes that
From (11) and (12), we have
□
The following lemma illustrates that the solution set of the combination of the G-variational inequalities problem is the intersection of the solution sets of two G-variational inequalities problems in a Hilbert space endowed with a graph.
Lemma 6.
Let C be a nonempty closed convex subset of Hilbert space H and let be a directed graph with . Let be α-GISM and β-GISM mappings with , respectively. Let Then, , .
Proof.
Firstly, we show that .
Let .
From definition of and , we have
and
for all with .
Therefore, it concludes that .
Secondly, we show that
Let . It follows that
for all with .
Let It follows that
and
for all with .
For each , we have
and
for all with .
Since and , we have .
Since , and G is transitive, we have .
From , monotonicity of B, (17) and (19), we have
It implies that
From A is -GISM, , (18) and (21), we have
It implies that
Let with . From (18), (21), and (23), we have
So, we can conclude that
From and (17), it implies that
From (25), monotonicity of A, and (18), we have
From , we have
From B is -GISM, , (19), and (26), we have
It implies that
Let with . From (19), (26), and (27), we have
So, we can conclude that
From (24) and (28), we have .
Therefore,
Hence,
□
The following example demonstrates the potential application of Lemma 6.
Example 2.
Let define by
and
Let with and . Then, are 1-GISM and -GISM, respectively. It is obvious that , for all . From Lemma 6, we can conclude that
The following lemma is instrumental in demonstrating the convergence of the sequence in our main theorem.
Lemma 7
where is a sequence in and is a sequence such that
([23]). Let be a sequence of nonnegative real numbers satisfying
- (1)
- (2)
Then,
This lemma provides a critical tool for establishing the convergence of sequences in the context of our main results. It ensures that under the given conditions, the sequence converges to zero, which is fundamental in the analysis of iterative methods in variational inequality and fixed point problems.
Together, these preliminary results form the foundation for the more advanced theorems and proofs that follow, particularly in the context of G-variational inequality problems and G-nonexpansive mappings in Hilbert spaces. The combination of these elements facilitates a deeper understanding of the structure and solutions of such problems, especially when the underlying set is equipped with a graph structure, which adds a layer of complexity and richness to the analysis.
3. Main Result
We present the following theorem for solving the G-variational inequalities problem and the fixed point problem by utilizing a combination of G-variational inequality problem and Lemma 6.
Theorem 1.
Let C be a nonempty closed convex subset of Hilbert space H and let be a directed graph with has property G and is convex and G is transitive with . Let be G-nonexpansive mapping. Let be α-GISM and β-GISM mappings with , respectively. Let be a G-contraction mapping with coefficient Assume that with and , and there exists such that Let the sequence be generated by and
where , , , with , with and .
Suppose the following conditions hold,
- (i)
- (ii)
Then, converges strongly to , is dominated by , dominates , and is dominated by .
Proof.
We divide the proof into five steps:
Step 1. We show that the sequence is bounded.
From Lemmas 2, 3 and 6, we have which is closed and convex. From Lemma 4, we have which is closed and convex. Then, is closed and convex. Put . Since dominates by , we have for all . From Lemmas 5 and 6, we have
Since , we have and .
It follows that
where , for all .
From the definition of and (31), we have
where , for all .
From mathematical induction, we can conclude that
Therefore, is bounded and so are and .
Step 2. We show that .
Since and is convex, we have .
From dominates by , we have for all .
From f is G-contraction mapping, T is G-nonexpansive mapping and , we have and .
From transitivity of G and , , , we have and .
Since and is convex, we have .
From f is G-contraction mapping, T is G-nonexpansive mapping, we have , and .
From transitivity of G and , , we have and .
Suppose that , for all .
Since and is convex, we have .
From f is G-contraction mapping, T is G-nonexpansive mapping, we have and .
By transitivity of G and and , we have , .
By induction, we have and for all .
Since is convex and , we have , for all .
Since dominates , we have for all .
From , for all , and G is transitive, we have for all .
Step 3. We show that and Use a similar method to (31); it can conclude that
where , for all .
We now show that
From the definition of , and (32), we have
where .
Applying Lemma 7, conditions (i) and (ii), we have
From (31) and the definition of , we have
It implies that
From (34) and the condition (i), we have
From the definition of , we have
From the above inequality, condition (i), (34) and (35), we obtain
Since the sequence is bounded and G has , without loss of generality, we may assume that there is a sequence of such that as and .
Assume that .
Since a Hilbert space H has an Opial’s property, T is a G-nonexpansive mapping and (36), we have
This is a contradiction. Then . Hence, .
Assume that .
Use a similar method to (31); it can conclude that
where .
From (30), we have .
Therefore, .
From , we have
where .
Step 5. Finally, we show that , where .
From the definition of and (31), we have
It implies that
Applying Lemma 7 with condition (i) and Equation (39), it can be summarized that sequence converges strongly to . This completes the proof. □
The subsequence results can be established based on the main theorem. Hence, the proofs are not provide.
Corollary 1.
Let C be a nonempty closed convex subset of Hilbert space H and let be a directed graph with has property G and is convex and G is transitive with . Let be G-nonexpansive mapping, let be α-GISM mapping with . Let be a G-contraction mapping with coefficient Assume that with and , and there exists such that Let the sequence be generated by and
where , , , with , and .
Suppose the following conditions hold
- (i)
- (ii)
Then, converges strongly to , is dominated by , dominates , and is dominated by .
Remark 1.
Our results of this paper improve and extend the work of Kangtunyakarn [21] and Tiammee et al. [9] in the following ways:
- 1.
- Under the conditions of Theorem 1, if we select the contraction mapping f as the constant function and set in our algorithm (29), we deriveThis is exactly the same as the Halpern iteration (6) described in [21]. Therefore, the result of Kangtunyakarn [21] is a specific case of Theorem 1.
- 2.
- By setting and in our algorithm (29), under the conditions of Theorem 1, we haveThis implies that the above algorithm coincides with the Halpern iteration (2) presented in [9]. Consequently, the result of Tiammee et al. [9] is a special case of Theorem 1.
4. Application
We are the first to study the G-minimization problem and we have also applied our main theorem to solve such a problem.
Let be a convex, lower semi-continuous function. The G-minimization problem is to find such that
for all and . A point is G-minimizer of f. We denote the set of solution of (42) by . The minimizers of the objective convex functionals in spaces with nonlinearity play a crucial role in the branch of analysis and geometry. Numerous applications in computer vision, machine learning, electronic structure computation, system balancing, and robot manipulation can be considered as solving optimization problems (see [24,25,26,27]).
We provide an example to illustrate the difference between a G-minimizer and a minimizer of function f.
Example 3.
Let be a function define by for all and let be such that , . Then we can see that is a G-minimizer of f, but is not a minimizer of function f.
Let be a proper convex function. The subdifferential of f is defined by
for all . Let f be a convex, lower semi-continuous function of C into .
For each , the resolvent operator of f is defined by for all .
Let be a set-valued mapping. Then, A is called accretive if for any , If there exist such that , then A is called m-accretive.
Theorem 2
([22]). Let C be nonempty closed convex subset of Hilbert space H and let be a convex, lower semi-continuous function. Then, the subdifferential of f is m-accretive.
Lemma 8.
Let C be nonempty closed convex subset of Hilbert space H and let be a convex, lower semi-continuous function. Let be a directed graph with . Let be the resolvent of for , i.e., . Then, for any ,
for all with . Moreover, we have is a G-nonexpansive mapping.
Proof.
For each , define a function by
for all .
For each . Let and for all .
Consequently, we can conclude that for all with
Next, we show that is a G-nonexpansive mapping.
Let , . From (43), we have with and Since and , we have .
Since and G is transitive, we have . Thus, is edge-preserving. Since , we have . So, we get .
Similarly, since , we have . So, we get .
Since and is m-accretive, we have
Using (44), we obtian
Hence is a G-nonexpansive mapping. □
Lemma 9.
Let C be a nonempty closed convex subset of Hilbert space H and let be a directed graph with . Let is convex and G is transitive with and let be a convex, lower semi-continuous function. Let be the resolvent mapping of f such that . Then, for , we have if and only if is a G-minimizer of f.
Proof.
First, we show that if then is a G-minimizer of f.
Let and for all .
From Lemma, we obtain that
for all and .
Let with and let for all . Since and is convex, we have .
From (45), and the convexity of f, we obtain
It implies that
for all with .
Taking limit at , we have
for all with .
Therefore, we conclude that is a G-minimizer of f.
Next, we show that if is a G-minimizer of f, then .
Let be a minimizer of f, we have
for all with .
From Lemma, we obtain that
for all with .
Let for all . Since and , we have .
Since and G is transitive, we have .
Since and is convex, we have .
From (46), and the convexity of f, we obtain that
the last inequality is determined from is a G-minimizer of f, i.e., .
It implies that
Hence . □
To apply our main result, we need the following lemma.
Lemma 10
([21]). Let C be a nonempty closed convex subset of Hilbert space H and let be a directed graph with dominates z for all . Let be convex and G be a transitive with . Let be a G-nonexpansive mapping with and . Then
- (i)
- is -GISM.
- (ii)
- .
Theorem 3.
Let C be a nonempty closed convex subset of Hilbert space H and let be a directed graph with has property G and is convex and G is transitive with . Let be G-nonexpansive mapping, let be a proper convex lower semi-continuous function, let be the resolvent of for and let be a G-contraction mapping with coefficient Assume that with and , and there exists such that Let the sequence be generated by and
where , , , with and .
Suppose the following conditions hold
- (i)
- (ii)
Then, converge strongly to , is dominated by , dominates , and is dominated by .
Proof.
From Lemma 10 and is a G-nonexpansive, we have
From Corollary 1 and (47), we can conclude the desired results. □
Next, we give examples to support our main result.
Example 4.
for all .
Let be a directed graph, where and .
Let the mappings be defined by
Suppose that the sequence is generated by and
for all . Then, the sequence converges strongly to .
Solution:
It is obvious that and .
First, we show that S is a G-nonexpansive mapping.
Let with . Then, it follows that with .
Since , , and is a convex set, we have
and
Similarly, we can conclude that T is a G-nonexpansive mapping.
Since , S is a G-nonexpansive mapping and Lemma 10, we have A is -GISM. It is obvious that B is 4-GISM and f is a G-contraction with .
From convexity of , we have
for all .
It follows that
for all .
Since , definitions of f and T, we have
and
So, we get .
From (54), we obtain
From (54) and (57), we have .
Since , (54) and (53), we have
From the convexity of , we have . Continue the method of (86), we have for all .
From , we have .
From and , we have
and
for all .
It follows that and .
From (54) and , we have
for all .
From and (57), we have
for all .
It follows that . Then we can conclude that is dominated by , dominates , and is dominated by .
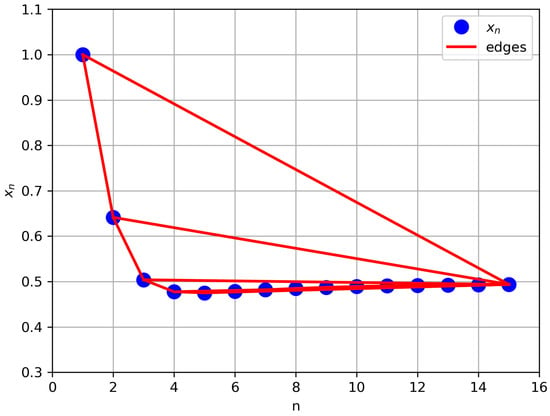
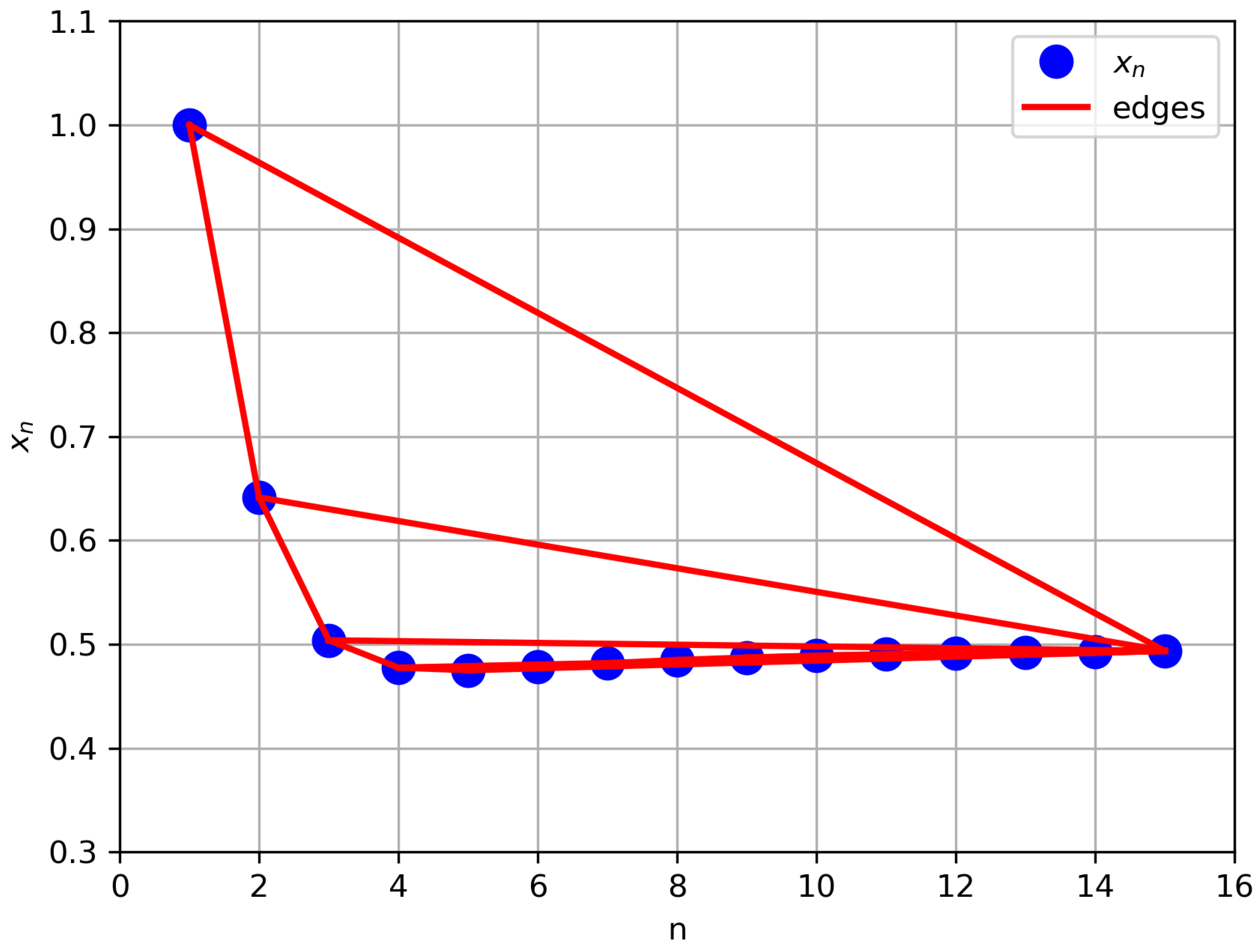
All conditions of Example 4 satisfies Theorem 1, so we can conclude that sequence converges strongly to The numerical results for the sequences is shown in Figure 1.
Figure 1.
The convergence behaviors of with and .
Example 5.
for all .
Let be a convex set and let be a directed graph, where . Let the mappings be defined by
Suppose that the sequence is generated by , where , and
where for all . Then, the sequence converges strongly to .
Solution:
It is obvious that , and .
From (60)–(63) and the definition of , it is easy to see that T is G-nonexpansive mapping, are -GISM, -GISM, respectively, and f is G-contraction with .
From convexity of , we have
for all .
Since C is half-space, we have
for all .
From (65) and (74), we have
for all .
Since and (67), we have and .
Since and (64), we have
Since is convex, then we have . Continue the method of (68), we have for all .
From (67), we have . Since , we have .
Since , and the definition of , we have
and
We can conclude that is dominated by , dominates , and is dominated by .
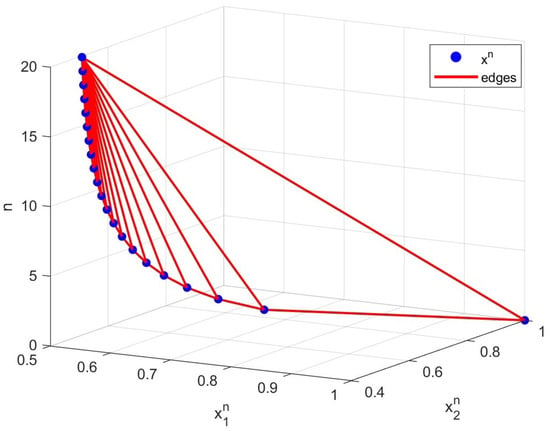
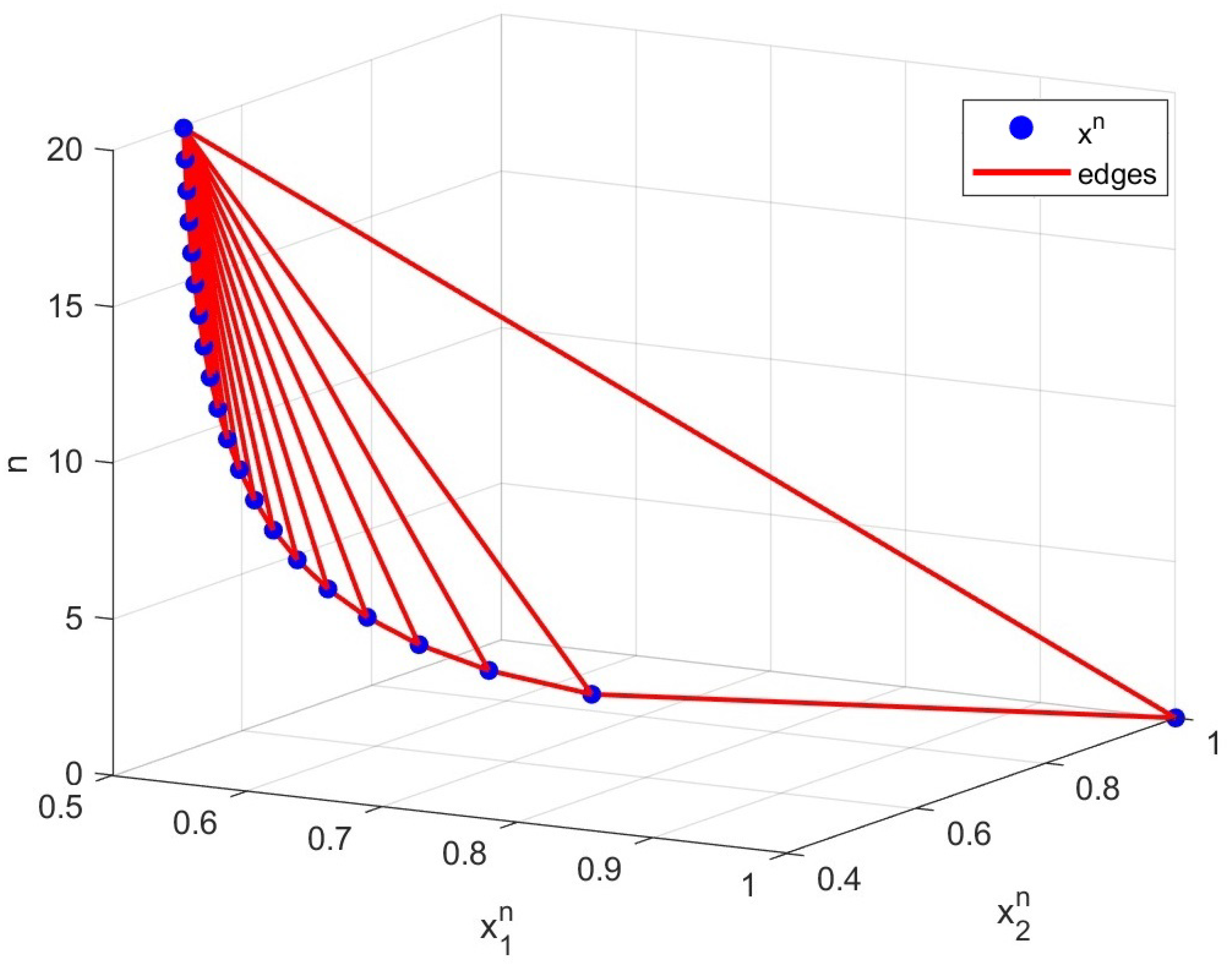
All conditions of Example 5 satisfies Theorem 1, so we can conclude that sequence converges strongly to The numerical results for the sequences is shown in Figure 2.
Figure 2.
The convergence behaviors of with and .
Example 6.
for all . Assume the sequence is generated by and
for all . We shall now demonstrate the computation , , and .

Let , and consider the directed graph , where the edge set is defined as . Define the mappings by
Solution:
We first show that T is a G-nonexpansive mapping. Let with . Then, with . From definition of T, it follows that
and
From Equation (70), we obtain
Thus, , proving that T is a G-nonexpansive mapping. It is easy to verify that f is a G-contraction.
Next, we choose . By the definition of , we have
for all . Consequently,
for all .
Given that and using the definitions of f and T, we have
and
Thus, .
From Equation (74), we obtain
Combining Equations (74) and (77), we conclude .
Since , using Equation (73), we compute
Similarly, we compute and as follows: since , definitions of f and T, we have
and
So, we get .
From (74), we obtain
From (74) and (81), we have .
Since and (73), we have
Finally, for : since , definitions of f and T, we have
and
So, we get .
From (74), we obtain
From (74) and (85), we have .
Since and (73), we have
We have presented a summary of the numerical calculations as shown in Table 1 and Table 2.
Table 1.
Explanation of .
Table 2.
Explanation of Members in .
5. Conclusions
This research explores the integration of G-variational inequality problems and fixed point theory within a Hilbert space endowed with a graph structure. The main contributions include the development of a new iterative method and a strong convergence theorem, which demonstrate the convergence of sequences to solutions that are part of the intersection of the solution sets for G-variational inequalities and fixed point problems. The study provides new lemmas that are essential for understanding G-nonexpansive mappings and G-inverse strongly monotone operators.
The research extends existing theories in nonlinear analysis and functional analysis, particularly those involving graph structures in metric spaces. By doing so, it broadens the scope of applications to optimization problems where constraints can be naturally represented by graphs, thus making the theory applicable to network theory, computational mathematics, and various applied sciences.
The paper also differentiates the combination of the G-variational inequality problems from the combination of the classical variational inequality problems, highlighting the necessity of incorporating graph structures when dealing with complex systems. The provided examples effectively demonstrate how G-variational inequality problems can be distinguished from standard variational inequality problems. Additionally, the assumptions of transitivity and convexity of are crucial for ensuring the validity of the convergence results. Transitivity maintains consistent connections between points on the graph, supporting the effectiveness of the iterative methods, while convexity preserves the geometric properties of the solution sets, which is essential for proving the convergence theorems.
Overall, this work lays a solid foundation for future research and applications in areas that require advanced mathematical tools and frameworks, particularly those involving graph-based constraints.
Author Contributions
A.K. (Atid Kangtunyakarn) dealt with the conceptualization, formal analysis, supervision, writing—review and editing. A.K. (Araya Kheawborisut) writing—original draft, formal analysis, writing—review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by King Mongkut’s Institute of Technology Ladkrabang [KREF146703], and this research is a result of the project entitled “The development of search engine by using the approximation method for solving the fixed point problem (Year1) No. RE-KRIS/FF67/041” by King Mongkut’s Institute of Technology Ladkrabang (KMITL), which has been received funding support from the NSRF.
Data Availability Statement
No new data were created.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Censor, Y.; Gibali, A.; Reich, S. The subgradient extragradient method for solving variational inequalities in Hilbert space. J. Optim. Theory Appl. 2011, 148, 318–335. [Google Scholar] [CrossRef] [PubMed]
- Dafermos, S.C. Traffic equilibrium and variational inequalities. Transp. Sci. 1980, 14, 42–54. [Google Scholar] [CrossRef]
- Ferrentino, R. Variational Inequalities and Optimization Problems. Appl. Math. Sci. 2007, 1, 2327–2343. [Google Scholar]
- Shehu, Y. Iterative methods for family of strictly pseudocontractive mappings and system of generalized mixed equilibrium problems and variational inequality problem. Fixed Point Theory Appl. 2001, 2001, 852789. [Google Scholar] [CrossRef]
- Bertsekas, D.P.; Gafni, E.M. Projection methods for variational inequalities with applications to the traffic assignment problem. Math. Program. Stud. 1982, 17, 139–159. [Google Scholar]
- Gibali, A.; Reich, S.; Zalas, R. Outer approximation methods for solving variational inequalities in Hilbert space. Optimization 2017, 66, 417–437. [Google Scholar] [CrossRef]
- Hieu, D.V.; Thong, D.V. A new projection method for a class of variational inequalities. Appl. Anal. 2018, 98, 2423–2439. [Google Scholar] [CrossRef]
- Jachymski, J. The contraction principle for mappings on a metric space with a graph. Proc. Am. Math. Soc. 2008, 136, 1359–1373. [Google Scholar] [CrossRef]
- Tiammee, J.; Kaewkhao, A.; Suantai, S. On Browder’s convergence theorem and Halpern iteration process for G-nonexpansive mappings in Hilbert spaces endowed with graphs. Fixed Point Theory Appl. 2015, 2015, 187. [Google Scholar] [CrossRef]
- Kangtunyakarn, A. Modified Halpern’s iteration for fixed point theory of a finite family of G-nonexpansive mappings endowed with graph. Rev. R. Acad. Cienc. Exactas Fís. Nat. Ser. A Mat. 2018, 112, 437–448. [Google Scholar] [CrossRef]
- Tripak, O. Common fixed points of G-nonexpansive mappings on Banach spaces with a graph. Fixed Point Theory Appl. 2016, 2016, 87. [Google Scholar] [CrossRef]
- Suparatulatorn, R.; Cholamjiak, W.; Suantai, S. A modified S-iteration process for G-nonexpansive mappings in Banach spaces with graphs. Numer. Algorithms 2018, 77, 479–490. [Google Scholar] [CrossRef]
- Suantai, S.; Donganont, M.; Cholamjiak, W. Hybrid methods for a countable family of G-nonexpansive mappings in Hilbert spaces endowed with graphs. Mathematics 2019, 7, 936. [Google Scholar] [CrossRef]
- Suantai, S.; Kankam, K.; Cholamjiak, W.; Yajai, W. Parallel hybrid algorithms for a finite family of G-nonexpansive mappings and its application in a novel signal recovery. Mathematics 2022, 10, 2140. [Google Scholar] [CrossRef]
- Wattanataweekul, R.; Janngam, K. An accelerated common fixed point algorithm for a countable family of G-nonexpansive mappings with applications to image recovery. J. Inequal. Appl. 2022, 2022, 68. [Google Scholar] [CrossRef]
- Khuangsatung, W.; Singta, A.; Kangtunyakarn, A. A regularization method for solving the G-variational inequality problem and fixed-point problems in Hilbert spaces endowed with graphs. J. Inequal. Appl. 2024, 2024, 15. [Google Scholar] [CrossRef]
- Kangtunyakarn, A. new iterative scheme for fixed point problems of infinite family of κi-pseudo contractive mappings, equilibrium problem, variational inequality problems. J. Glob. Optim. 2013, 56, 1543–1562. [Google Scholar] [CrossRef]
- Blum, E.; Oettli, W. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Aubin, J.P.; Ekeland, I. Applied Nonlinear Analysis; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Dafermos, S.C.; Mckelvey, S.C. Partitionable variational inequalities with applications to network and economic equilibrium. J. Optim. Theory Appl. 1992, 73, 243–268. [Google Scholar] [CrossRef]
- Kangtunyakarn, A. The variational inequality problem in Hilbert space endowed with graphs. J. Fixed Point Theory Appl. 2020, 22, 4. [Google Scholar] [CrossRef]
- Takahashi, W. Nonlinear Functional Analysis; Yokohama Publishers: Yokohama, Japan, 2000. [Google Scholar]
- Xu, H.K. An iterative approach to quadratic optimization. J. Optim. Theory Appl. 2003, 116, 659–678. [Google Scholar] [CrossRef]
- Bruck, R.E.; Reich, S. Nonexpansive projections and resolvents of accretive operators in Banach spaces. Houst. J. Math. 1977, 3, 459–470. [Google Scholar]
- Guler, O. On the convergence of the proximal point algorithm for convex minimization. SIAM J. Control Optim. 1991, 29, 403–419. [Google Scholar] [CrossRef]
- Kamimura, S.; Takahashi, W. Approximating solutions of maximal monotone operators in Hilbert spaces. J. Approx. Theory 2000, 106, 226–240. [Google Scholar] [CrossRef]
- Marino, G.; Xu, H.K. Convergence of generalized proximal point algorithm. Commun. Pure Appl. Anal. 2004, 3, 791–808. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).