1. Introduction
Over the past decade, the rapid development of multi-agent systems has been evident. Among various advancements, Euler–Lagrange dynamics have emerged as particularly notable due to their potential applications. The consensus problem in a multi-agent system refers to whether the state of the agents can reach a consensus state with or without a leader. This process involves an information exchange among agents, modeled by a communication graph that describes the connectivity of the agents. To address the issue of parametric uncertainty and a dynamic leader, a fixed-time robust controller was introduced in [
1] through the application of the backstepping control technique to guarantee the consensus of the Lagrange systems. Furthermore, an adaptive distributed output observer was designed to circumvent the need for the leader’s full state in [
2]. A novel fault-tolerant formation controller for a multi-agent system was developed in [
3] by considering the actuator failures. For a class of uncertain strict-feedback nonlinear systems, an adaptive leaderless consensus solution was given to ensure the system’s performance in [
4]. The key distinction between leader–follower and leaderless systems lies in the presence of a leader in the former, who informs the followers of the control target, whereas the latter relies on a distributed control algorithm to guide all agents towards a common state [
5].
It should be noted that the methods mentioned above do not account for the communication problems among agents. These approaches require instantaneous message transmission without delay, enabling agents to immediately receive messages from their neighbors. However, in real-world scenarios, challenges such as sensor malfunctions, network congestion, and unexpected environmental changes are common. To address this issue, recent research has concentrated on communication delays in the information exchange process. A robust sliding mode control consensus algorithm was proposed in [
6] that can handle the uncertain system nonlinearities in the presence of communication delays. Assuming the communication graph among agents is directed, the time delay and intermittent sampling were used to realize leader–follower consensus by using sufficient past position information in [
7]. Additionally, leveraging the theory of small gains, a novel synchronization mechanism that can achieve position synchronization despite the presence of communication delays and intermittent communications was developed in [
8].
While the above consensus algorithm accounts for communication delays between agents, the control input still operates within a time-triggered control framework. This framework necessitates the continuous updating of the controller, regardless of whether each agent needs an update to maintain the expected performance. Consequently, this may result in increased resource consumption and communication burden, posing challenges in light of practical energy and bandwidth limitations. Hence, it is essential to design an event-triggered strategy to avoid continuous control input updates [
9,
10]. In [
9], fixed threshold, relative threshold, and switching threshold strategies were applied to design event-triggered controllers. As mentioned in [
11], the event-triggered strategy results in better performance in balancing resource utilization and control effects. For leaderless systems, a dynamic event-triggered control strategy was proposed to solve the consensus problem of Euler–Lagrange systems in [
12]. An optimal algorithm in the sense of minimum global loss function was designed based on the event-triggered strategy in [
13] to minimize the communication burden further. For a general heterogeneous nonlinear multi-agent system, the event-triggered control algorithm was proposed within the framework of the prescribed performance control in [
14]. To address unknown nonlinear dynamics and avoid the need for prior global communication information, a distributed event-triggered method based on the fuzzy approximation technique was provided in [
15].
In this work, we design a new consensus algorithm for Euler–Lagrange systems that can tolerate delays or packet loss after information transmission. In these systems, each agent communicates with its neighbors at irregular discrete time intervals. Our algorithm utilizes an event-triggered mechanism for each agent. We demonstrate that this algorithm effectively avoids the Zeno phenomenon by guaranteeing a minimum time interval between events. The distinguishing feature of our proposed event-triggered scheme, compared to existing solutions, is its ability to decrease the controller’s update frequency in an aperiodic and irregular manner. This results in energy conservation and reduced communication bandwidth requirements despite the presence of delays and intermittent communication among agents.
The rest of this paper is organized as follows.
Section 2 provides preliminary knowledge of graph theory and elaborates on problem formulation.
Section 3 introduces the consensus scheme and stability analysis.
Section 4 presents simulation results for six Euler–Lagrange systems. Finally,
Section 5 concludes the paper and states future work.
Notations: For a vector y, represents the two-norm of y. The norms and are defined as for , and , respectively. if exists and is finite and if . is the maximum eigenvalue of matrix A and is the minimum eigenvalue of matrix A.
3. Proposed Solution
Firstly, we introduce velocity tracking error
where reference velocity
can be designed as [
8]
where
is an estimate of the desired velocity of the
ith agent and
is a term designed for consensus purpose.
and
are designed in detail below.
The most recent information of agent
j that transmits to agent
i successfully is at
defined as
where
T is sample period and
is the delay that agent
j sent information at instant
,
and the information is received by agent
i after
. Hence, the information is available to agent
i at instant
.
The desired velocity
is only available to leader
, and the other agents
excludes
can only estimate the velocity with respect to their neighbors through the following discrete time algorithm for
,
where the consensus algorithm updates at instants
with
.
is the desired velocity and each leader can obtain it directly.
,
j: (
j,
i),
is the set of the neighbors of the
ith followers. We let
where
represents the integer part of
x, and
and
are positive gains.
The consensus term
is updated by
where
,
and
are positive gains, and vector
is the current position of the
jth agent which is obtained by the
ith agent at the most recent instant,
t.
Now, we design an event-triggered scheme for control input
such that velocity error
converges to zero asymptotically. Usually, control input vector
for (
1) is chosen as
where
is defined in (
2),
and
are symmetric positive definite matrices, and
is defined in Property P5. Inspired by [
18], to decrease the controller’s update frequency, we consider the following event-triggered form of (
12):
According to Property P6 and by using (
14) and (
15), Dynamic Model (
1) can be rewritten as
We let
and
represent the error caused by the event-triggered scheme:
Then, the event-triggered strategy is designed as
where
is a positive constant less than one, and
with
and
.
Theorem 1. Consider the multi-agent system described in (1). Suppose Assumption 1 and 2 hold. Then, the control objective can be achieved, that is, and → as under the proposed Event-Triggered Controller (14). In addition, the Zeno phenomenon can be avoided. Proof. We consider the Lyapunov function as
where
denotes the estimation error. Then, the derivative of (
19) is
Substituting (
16) into (
20), we obtain
From Property P3, we can conclude that
,
. After substituting (
15) and (
17) into (
21), we have
Form Event-Triggered Strategy (
18), we have
It is easy to verify that
Hence, (
23) can be rewritten as
It can be inferred from (
25)
We can know from (
26) that
is bounded. Hence, we can conclude that
. We can determine from [
8] that
and
are bounded. From System Model (
1) and definition of P6, we have
Combining with properties P1, P2, and P4, we can deduce that
is upper-bounded by a positive constant. Then, we can infer from (
16) that
is bounded. From (
26), we can further conclude that
is bounded and thus
. According to Lemma 1 and
,
,
, we have
as
. If
as
and by Theorem 1 in [
8], we can conclude that
→ 0,
→
as
for all
i,
. □
Zeno Behavior
The solution exhibits Zeno behavior if an infinite number of controller updates occur in a finite time period. Zeno behavior presents a significant challenge for the practical implementation of real-time systems, as it effectively requires the controller to process an infinite number of updates in a finite time period. To circumvent this issue, Event-Triggered Condition (
18) is employed. In this subsection, we show that the Zeno phenomenon can be excluded by our proposed method, i.e., there exists a positive instant
satisfying
. We can determine from the event-triggered mechanism (
18) that
Recalling from the definition of
and
, we have
From Assumption 1, we know that
is bounded.
,
, and
are bounded as we can determine from the above analysis. Hence, we can infer from (
13) that
is bounded. Therefore, we can conclude that
and
are bounded. Defining
and
as the upper bound of
and
, we can obtain
Noting that
, while satisfying the trigger condition at the
instant, we can conclude that
Hence, there exists a positive lower bound
between two consecutive executions of
. As a result, the proposed controller avoids the Zeno phenomena successfully.
Remark 1. Detailed comparisons with the existing consensus controllers for Euler–Lagrange systems are highlighted as follows: (1) In [19], a distributed consensus approach for a group of Euler–Lagrange systems was proposed. However, this approach did not consider communication delays among systems, and continuous information exchange was required. In contrast, our proposed approach is versatile and can be applied to a wider range of communication scenarios. (2) In [8], a synchronization method was developed for Euler–Lagrange systems with communication delays and intermittent information exchange. However, the above results rely on the classic time-triggered control paradigm, where the update of the control signal is periodic even when the system is performing well. In our paper, we introduce an event-triggered approach that reduces the controller’s update frequency. Remark 2. This paper considers relaxed communication conditions, which can be intermittent and subject to time-varying communication delays and information losses. Therefore, it can be applied to ideal situations where information exchange is continuous and there is no communication delay, such as in [19]. Intuitively, control performance may be improved under ideal communication conditions. However, a rigorous analysis of this case requires further investigation. 4. Simulation
We perform a simulation to verify the effectiveness of our developed algorithm. Specifically, we consider a multi-agent system comprising six Euler–Lagrange systems. The dynamic model for each agent is in the form of (
1) with
,
, and
. The inertial matrix
, the Coriolis and centrifugal torque matrix
, and the vector of gravitational force
are given as
where
with
kg,
m,
m,
kg/m
2.
where
m/
. The regressor matrix
is given as
where
,
,
,
,
,
,
,
,
, and
.
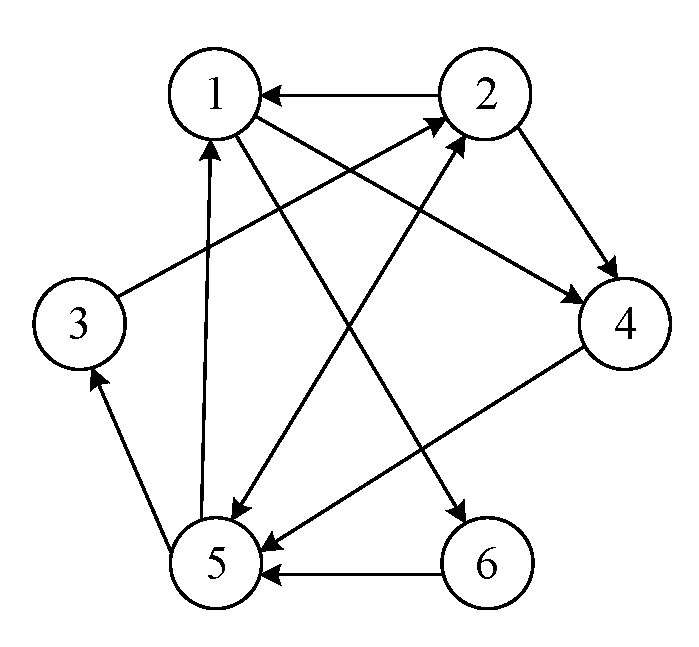
The communication among agents is represented by a directed graph that contains a spanning tree, as shown in
Figure 1. We define
, which indicates that only Agent 1 has direct access to the desired velocity of
m/s. As shown in
Figure 1, the remaining agents can also obtain
indirectly through Agent 1. Sampling period
T is set as
s, i.e., agent
j can send information to agent
i at the
instant, and the message is received by agent
i after a delay of
s. The control gains of observer (
9) can be arbitrary positive numbers and are chosen as
and
in this simulation.
and
in (
10) are set as 19 and
, respectively. The parameters in Event-Triggered Strategy (
18) are chosen as
,
, and
.
The initial states of the six agents are chosen as
Other variable initial states are set to 0. The simulation of Event-Triggered Strategy (
14) applied to (
1) over the time interval of 0–20 s is performed in MATLAB (solver: dde23).
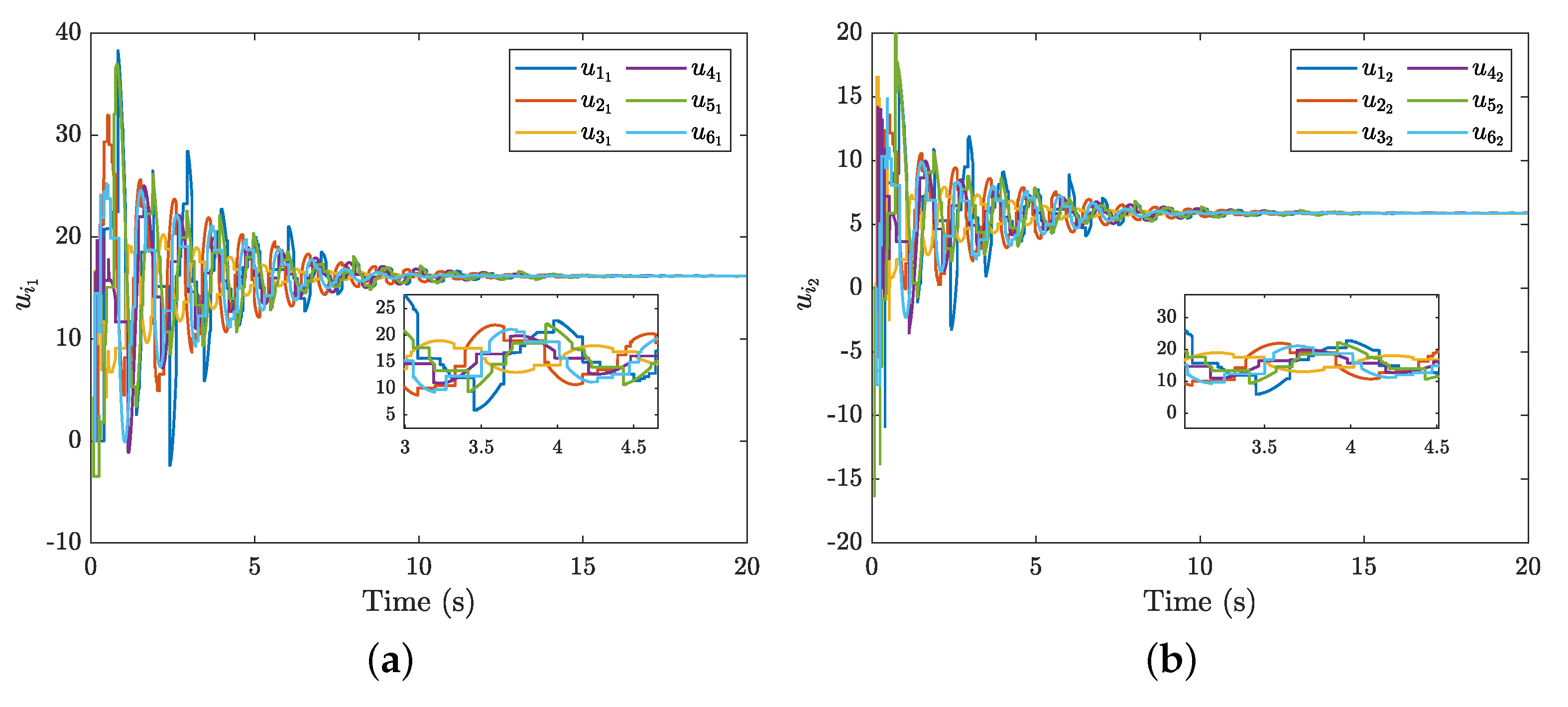
Figure 2 and
Figure 3 illustrate that the consensus of positions and velocities of all agents can be achieved using our developed event-triggered input
, despite the delayed communication and intermittent exchange of information between agents.
Figure 4 shows that the algorithm effectively reduces the number of controller updates while maintaining system performance. The trigger times for
are significantly reduced, as shown in
Figure 5. The trigger times for the six agents are reduced from 238990 to 12454, 13053, 13492, 13196, 12408, and 12994, respectively. These results confirm that our event-triggered control method achieves consensus, significantly reducing the number of control signal updates and conserving computational and communication resources.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}