Abstract
In this paper, we propose a definition of block tensors and the real representation of tensors. Equipped with the simplification method, i.e., the real representation along with the M-P inverse, we demonstrate the conditions that are necessary and sufficient for the system of dual split quaternion tensor equations , when its solution exists. Furthermore, the general expression of the solution is also provided when the solution of the system exists, and we use a numerical example to validate it in the last section. To the best of our knowledge, this is the first time that the aforementioned tensor system has been examined on dual split quaternion algebra. Additionally, we provide its equivalent conditions when its Hermitian solution and -Hermitian solutions exist. Subsequently, we discuss two special dual split quaternion tensor equations. Last but not least, we propose an application for encrypting and decrypting two color videos, and we validate this algorithm through a specific example.
Keywords:
dual split quaternion tensor equation; Einstein product; real representation; η-Hermitian solution; Moore–Penrose inverse MSC:
11R52; 15A09; 15A69
1. Introduction
The Irish mathematician W.R. Hamilton pioneered research on the concept of quaternions in 1843 [1]. There has been a rapid development in quaternions during recent years. There exist various kinds of related work about quaternions that achieve valuable results [2,3]. Most recently, researchers have focused on the theories for solving quaternion matrix equations, i.e., general and special solutions of quaternion matrix equations [4]. Quaternions and quaternion matrices have been comprehensively applied to multiple areas including algebra, analysis, topology, and physics. In particular, they are crucial in several fields, such as signal processing [5], image processing [6], and quantum physics [7].
In 1849, building upon Hamilton’s work, James Cockle further introduced “split quaternions” [8]. The set of split quaternions is denoted as follows:
where
As a derivative version of quaternions, its form is similar to the original definition of quaternions, but they are indeed two different algebras. The definition proposed by James Cockle has a more complex algebraic structure. Split quaternions play a significant role in various fields, e.g., physics, quantum mechanics, signal processing, and deep learning. Split quaternions have been applied to denote Lorentz rotations, and Lorentz transformations can be represented as unitary matrices of split quaternions, which reveals the geometric and physical importance of split quaternions [9,10,11,12,13,14,15].
Clifford [16] later proposed dual numbers and dual quaternions in 1873, and they have already become the basis for handling some typical engineering problems [17]. Dual split quaternions, like dual quaternions, expand the idea of dual numbers to include split quaternions. Building on the principles of split quaternions, dual split quaternions have been applied to diverse disciplines including algebra, geometry, and physics [18,19,20,21].
Below is a typical matrix equation system, which we will mainly focus on. There exists some related work providing solutions to it, but we will explore this equation system as defined in the domain of dual split quaternion tensors.
Due to its wide applications in fields such as biology, inverse problems in vibration theory, and linear programming, system (1) has been extensively studied. Rao and Mitra [22] established the criteria for the solvability of system (1) and also presented their general solutions. Khatri and Mitra [23] examined their Hermitian solutions within the complex field. Wang [24] derived conditions for solvability and provided solutions for bi-symmetric cases of system (1) in the quaternion skew field. Li and others [25] examined generalized reflexive solutions for complex system (1). Yuan [26] used spectral decomposition to investigate least squares solutions for system (1). Xie [27] applied the M-P inverse, as well as the rank of quaternion matrices, to determine the equivalent conditions when there existed solutions, and then proposed the general solution. Si and others [15] used real representations to establish various solutions of system (1) and their equivalent conditions over split quaternion field.
Tensors are useful in engineering and science, and there are some papers focusing on the solutions of tensor equations [28,29,30,31,32,33]. With dual split quaternions that can represent rotations and translations commonly used in artificial intelligence [18], tensors over dual split quaternions can be further applied to more scenarios. For instance, using dual split quaternion tensors allows for the simultaneous encryption of two videos, enhancing the efficiency of encryption and decryption. Moreover, due to the complexity of the mathematical structure of dual split quaternions, videos encrypted with dual split quaternion tensors are not easily decrypted. Considering these advantages, tensors over dual split quaternions should be explored both in theory and in reality for better applications.
In this paper, we focus on solving system (1), defined in the space of dual split quaternion tensors. To the best of our knowledge, it is the first exploration of the above system within the dual split quaternion tensor algebra. Specifically, it aims to solve the following system of dual split quaternion tensor equations:
This paper is designed with the following structure: Section 2 describes essential definitions and corollaries that are essential to our subsequent analysis. Section 3 investigates the conditions that are equivalent for system (2) when there exist solutions. In this section, we further demonstrate its general solution in cases where solutions are attainable. Furthermore, we present the sufficient and necessary criteria when system (2) have -Hermitian solutions. Based on these results, we introduce the equivalent condition for the Hermitian solution, along with the general expressions of solutions for two specific dual split quaternion tensor equations. Ultimately, we present a specific numerical example and an encryption and decryption algorithm as an application.
In this paper, the dual number field, quaternion field, split quaternion field, dual quaternion field, and dual split quaternion field are represented by , , , , and , respectively. All tensors over are represented using .
2. Preliminary
In this section, there are three parts that provide fundamental knowledge for the subsequent demonstration of this paper. In the first part, we will give the definition of dual split quaternion tensors. The second part will cover some definitions and propositions about tensors. Lastly, we will present various real representations of split quaternion tensors.
2.1. Dual Split Quaternion Tensors
is a multidimensional array tensor with entries. Let , , and , respectively, represent the sets of the order M tensors with dimensions over the real field , real quaternion algebra , and real split quaternion algebra .
For , . When , is referred to as the transpose of and is denoted by . When , is the conjugate transpose of , represented as . A diagonal tensor has all zero entries, except for the elements . When all diagonal elements of are equal to 1, is referred to as a unit tensor, expressed as . Specifically, if , it is expressed as . denotes the zero tensor whose elements are all zero.
Definition 1
([16,34]). The field of dual numbers is expressed as follows:
where ϵ is the infinitesimal unit.
By extending quaternions and split quaternions to include dual numbers, we derive the definitions of dual quaternions and dual split quaternions as follows:
The sets of dual quaternion tensors and dual split quaternion tensors [18,34] are represented as follows:
For , means that and , and vice versa. is called the conjugate transpose of . are called the -conjugate transposes of , where .
For , is uniquely identified as , where , and . The conjugate transpose of satisfies . Additionally, for , the -conjugates and -conjugate transposes [35] of have the following forms:
and
Definition 2.
Let . Provided that fulfills the following criteria:
we refer to as a η-Hermitian tensor.
For ; then, we can derive that and . Furthermore, means that and , and vice versa.
2.2. Basic Theory with Einstein Product
Definition 3
([36]). Let and . Then, we can define the Einstein product of tensors and through the operation as follows:
Proposition 1.
Let and . Then, the following are true:
- 1.
- ;
- 2.
- and .
Definition 4
([33,37]). Let and . is referred to as the Moore–Penrose inverse of , expressed as , if the following conditions are all fulfilled:
- 1.
- ;
- 2.
- ;
- 3.
- ;
- 4.
- .
Furthermore, projectors and have the following forms:
Similar to block matrices, reference [37] provides the definition of block tensors and reference [38] provides the definition of block tensors when their sizes are the same. Next, we extend the definitions from references [37,38] to split quaternion tensors to give the definition of block tensors with the same size.
Definition 5.
Let and . Then, the following are true:
- 1.
- The ’row block tensor’ formed by and is , andwhere .
- 2.
- The ’column block tensor’ formed by and is , andwhere .
In particular, let , , and . Then, the following is true:
Remark 1.
is the tensor located at row i, column in the aforementioned block tensor, and it will be used in the following statement.
Lemma 1
([37]). Let , , , and , . Then, the following are true:
- 1.
- 2.
Next, we will introduce the definition of the transformation t between a tensor and a matrix within split quaternion algebra [33,39]. Under this definition, we can simplify the tensor into a matrix.
Definition 6.
The transformation with is defined as follows:
where and .
Lemma 2
([33]). Let and . Then, t satisfies the following properties:
- 1.
- The map t is bijective and its inverse map exists as follows:
- 2.
- t satisfies: and .
Example 1.
Let be defined by the following:
Then,
Consequently, there is a one-to-one correspondence between the elements of the split quaternion matrix and the split quaternion tensor. Thus, we can make use of the above definition to transform the tensor into a matrix for further calculations.
2.3. Real Representations of Split Quaternion Tensors
In this section, we will provide various real representations using the definition of block tensors in the above section.
Let , where , . We will define three kinds of real representations of based on the real representation in [11], as follows:
Definition 7
([15,35]). Let , where , , , , . Then, we define the following:
where , and .
As shown in the next proposition, we present the relevant characteristics of real representations discussed previously. These properties will play a crucial role in subsequent sections and can be easily obtained through simple calculations. Let the following be true:
Proposition 2.
For , let , and . Then, the following is true:
- 1.
- ;
- 2.
- 3.
- ;
- 4.
- (a) ;(b) ;(c) ;
- 5.
- ;
- 6.
- (a) ;(b) ;(c) ;
- 7.
- .
3. The General Solution to System (2)
Using the definitions and lemmas outlined above, this part will examine the solutions to system (2). At the beginning of this section, we present two lemmas. Utilizing Definition 6, we can transform tensors into matrices. Consequently, the subsequent lemmas can be readily proven using matrix proof techniques found in references [27,40], so this paper will not delve into the details. Building on these lemmas, split quaternion tensors’ real representations are used for obtaining the necessary and sufficient criteria when system (2) has solutions, as well as the general solution expression.
Lemma 3
([40]). Let , , and . Set the following:
Then,
is consistent if and only if the following is true:
Building on this, the general solution for system (3) is stated in the following form:
where are arbitrary tensors of appropriate size defined on .
Lemma 4
([27]). Suppose that , , , and . Set the following:
Then, the following descriptions are equivalent:
- 1.
- 2.
Based on these, the general solution for system (2) is represented as , where the following is true:
and are random tensors with suitable dimensions.
Remark 2.
Note that the set of real tensors is included within the set of quaternion tensors, since real numbers are special cases of quaternions with all imaginary parts set to 0. Thus, the conclusions above also hold in the field of real tensors.
Theorem 1.
Suppose that , , , and . Set the following:
Then, the following descriptions are equivalent:
- 1.
- 2.
- The system of real tensor equations, namelyis consistent.
- 3.
Based on these circumstances, the general solution of system (2) can be represented as , where
and are random tensors with proper dimensions.
Proof.
(1) ⇔ (2)
If condition (1) holds, it indicates that system (2) possesses a solution. Thus, we can express the solution for system (2) as , where . By substituting into system (2), we obtain the following split quaternion tensor equations:
Let and . Apply the real representation to the system, and, using (2) and (3) of Proposition 2, we then obtain the following:
i.e.,
Thus, is a pair of solutions to system (4).
On the other hand, let be the solutions for system (4). Using 4a of Proposition 2, we obtain the following:
i.e.,
Thus, represent solutions to the system of real tensor equations. Likewise, and are also solutions to the system. Then, we define the following:
Set the following:
Using direct computation, we obtain the following:
and
where
and
Then, we let the following be true:
and
where and .
Due to 6a of Proposition 2, and . Thus, the following is true:
Due to the above, we can obtain as the solution of system (5). Furthermore, it is clear that system (2) and system (5) are equivalent. Therefore, when system (2) has solutions, system (4) also has solutions, and vice versa. In addition, we can deduce the general solution of system of dual split quaternion tensor equations using Lemma 4 as , where the following is true:
and are random tensors with suitable size.
Additionally, (2) and (3) are equivalent to each other, which can be easily proven using Lemmas 3 and 4. We will not elaborate further on these points here. □
In the following section, we will propose equivalent conditions required when system (2) has -Hermitian solutions.
Theorem 2.
Suppose that , , , and .
Set the following:
Proof.
It is only necessary to demonstrate the situation for ; the other situations are identical to it, so we omit them. Let us assume that , which is a j-Hermitian solution of system (2), where . Then, we obtain the following:
Let . Apply the real representation to the system, and, using 2 and 3 of Proposition 2, we then obtain the following:
i.e.,
According to 7 of Proposition 2 and the definition of real representation, we obtain the following:
Thus, the above system can be expressed as follows:
i.e.,
Using 5 in Proposition 2, we obtain the following:
Consequently,
i.e.,
On the other hand, if system (4) has a pair of solutions that satisfies and , then the system (4) can be denoted as follows:
and
As indicated by 4b in Proposition 2,
are also solutions to the system. Next, we define the following:
Set the following:
Using direct computation, we obtain the following:
and
where
and
Then, we let the following be true:
and
where and .
Due to 6b of Proposition 2, and . Thus, the following is true:
That is, is a pair of solutions of system (4). Then, the following is true:
According to 7 of Proposition 2 and Definition 7, we obtain the following:
i.e.,
and
Based on the above theorems and lemmas, we will next present the equivalent condition when system (2) possesses a Hermitian solution. Additionally, we will put forward the equivalent criteria when two specific equations, and , have solutions, along with their general solution expressions.
Corollary 1.
Let , , , and . Set the following:
Then, system (2) has a Hermitian solution, , and it means that the following system of real tensor equations has a pair of symmetric solutions , and vice versa:
Corollary 2.
Let and , where . Set the following:
Then, the subsequent descriptions correspond to each other as follows:
- 1.
- Dual split quaternion tensor equation is solvable.
- 2.
- The following system of real tensor equations is consistent:
- 3.
- .
Based on these circumstances, the general solution of tensor equation is represented as , where the following is true:
where
and and are arbitrary real tensors with appropriate dimensions.
Corollary 3.
Suppose that and . Let the following be true:
Then, the descriptions below correspond to each other:
- 1.
- The dual split quaternion tensor equation is solvable.
- 2.
- The following system of real tensor equations is consistent:
- 3.
- .
Based on these situations, the general solution of tensor equation can be expressed as , where the following is true:
where
and and denote random tensors over with suitable dimensions.
4. Numerical Example
This segment will give an example to substantiate Theorem 1 and an example as an application of Theorem 1.
Example 2.
Let , , , and , where the following is true:
Using MATLAB 7.0, it can be proven that part (3) of Theorem (1) in this paper holds, as follows:
and
i.e.,
Then, it can be deduced that the system of dual split quaternion tensor Equation (2) is solvable, and a solution for this system can be expressed as , as follows:
and
Example 3.

In this section, we propose a method for video encryption and decryption using Theorem 1 and provide a specific example to demonstrate this method.
Similar to quaternions [6], it has been demonstrated that split quaternions can represent color images [41]. Split quaternion tensors can represent color videos, as long as the video is segmented into multiple image slices. Therefore, the dual split quaternion tensor can represent two color videos.
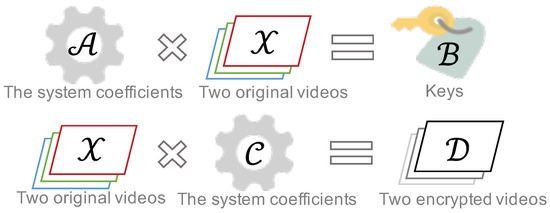
We can encrypt two color videos through system (2), and the following model is the encryption process based on system (2) (Figure 1):
Figure 1.
The model for encrypting two videos.
It is clear that system (2) and the following system are equivalent, so we can use system (22) to encrypt and decrypt videos.
We use two original videos, and , each composed of 51 slices of color images, which are pixels in size, denoted by [42]. That is, . and are the system coefficients. For simplicity, we select all , , , and as real matrices, and they are invertible. Furthermore, we use and to denote the keys. and represent two encrypted videos. The process of encryption is described below (Algorithm 1):
| Algorithm 1 Encryption process |
|
For the decryption process, we use two encrypted videos, and , obtained from the encryption process, along with keys and , as well as the system coefficients , , , and , to recover the two original color videos. The decryption algorithm is represented as follows (Algorithm 2):
| Algorithm 2 Decryption process |
|
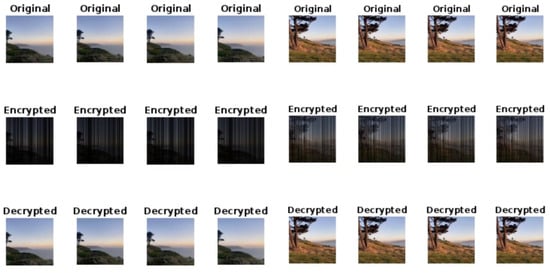
The encryption’s CPU time is 59.2300 s and the decryption’s CPU time is 145.9600 s. The figure below illustrates a portion of slices from the encrypted and decrypted videos’ results (Figure 2).
Figure 2.
The original, encrypted, and decrypted images of randomly selected slices from color videos and .
To assess the quality of the encryption and decryption algorithm for color videos, we utilize the peak signal-to-noise ratio (PSNR), the structural similarity index measure (SSIM) and the feature similarity index measure (FSIM), the results of which are presented in Table 1 and Table 2. A higher PSNR value usually indicates smaller errors, meaning that the quality of the processed image is higher. The results show that the PSNR values are all greater than 30 and that all SSIM and FSIM values are equal to 1, indicating a high degree of similarity between the decrypted videos and the original videos. This further demonstrates the effectiveness of our encryption and decryption algorithms.
Table 1.
PSNR, SSIM, and FSIM of Video 1.
Table 2.
PSNR, SSIM, and FSIM of Video 2.
5. Conclusions
We use the real representations of split quaternions to simplify the system of dual split quaternion tensor equations into real tensor equations. Based on this, we put forward the equivalent conditions for this system’s solvability and the general expression of solutions. Subsequently, this proposed theorem is applied to two specific cases of dual split quaternion tensor equations. Furthermore, the paper presents the equivalent conditions when the Hermitian solution (denoted as ) and -Hermitian solutions (denoted as ) of system (2) exist, using various real representations. Additionally, we provide a numerical example using MATLAB to validate the correctness of the key theorem presented in this paper. Finally, we use Theorem 1 to present a method for encrypting and decrypting two color videos, along with a specific example. The algorithm’s efficacy is demonstrated by PSNR, SSIM, and FSIM.
Author Contributions
Methodology, L.Y. and Q.-W.W.; Software, Z.K.; Investigation, Q.-W.W.; Writing—original draft, L.Y.; Writing—review & editing, Q.-W.W.; Supervision, Q.-W.W.; Funding acquisition, Q.-W.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research is supported by the National Natural Science Foundation of China (No. 12371023).
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
Zuliang Kou was employed by the Shanghai Newtouch Software Co., Ltd. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Hamilton, W.R. Lectures on quaternions. In Landmark Writings in Western Mathematics 1640–1940; Elsevier: Amsterdam, The Netherlands, 1853. [Google Scholar] [CrossRef]
- Zhang, F.Z. Quaternions and matrices of quaternions. Linear Algebra Its Appl. 1997, 251, 21–57. [Google Scholar] [CrossRef]
- Kösal, H.; Tosun, M. Commutative quaternion matrices. Adv. Appl. Clifford Algebr. 2014, 24, 769–779. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Q.W.; Xie, L.M. The Hermitian solution to a new system of commutative quaternion matrix equations. Symmetry 2024, 16, 361. [Google Scholar] [CrossRef]
- Cyrus, J.; Clive, C.T.; Danilo, P.M. A class of quaternion valued affine projection algorithms. Signal Process. 2013, 93, 1712–1723. [Google Scholar] [CrossRef]
- Miao, J.; Kou, K.I. Color image recovery using low-rank quaternion matrix completion algorithm. IEEE Trans. Signal Process. 2021, 31, 190–201. [Google Scholar] [CrossRef]
- Adler, S.L. Quaternionic Quantum Mechanics and Quantum Fields. International Series of Monographs on Physics; Oxford University Press: Oxford, UK, 1995; Volume 88. [Google Scholar] [CrossRef]
- Cockle, J. On systems of algebra involving more than one imaginary and on equations of the fifth degree. Philos. Mag. 1849, 36, 434–437. [Google Scholar] [CrossRef]
- Alagöz, Y.; Oral, K.H.; Yüce, S. Split quaternion matrices. Miskolc Math. Notes 2012, 13, 223–232. [Google Scholar] [CrossRef]
- Erdoğdu, M.; Özdemir, M. On eigenvalues of split quaternion matrices. Adv. Appl. Clifford Algebras. 2013, 23, 615–623. [Google Scholar] [CrossRef]
- Erdoğdu, M.; Özdemir, M. On complex split quaternion matrices. Adv. Appl. Clifford Algebras. 2013, 23, 625–638. [Google Scholar] [CrossRef]
- Kula, L.; Yaylı, Y. Split quaternions and rotations in semi Euclidean space . J. Korean Math. Soc. 2007, 44, 1313–1327. [Google Scholar] [CrossRef]
- Özdemir, M.; Ergin, A.A. Rotations with unit timelike quaternions in Minkowski 3-space. J. Geom. Phys. 2006, 56, 326–332. [Google Scholar] [CrossRef]
- Si, K.W.; Wang, Q.W. The general solution to a classical matrix equation AXB = C over the dual split quaternion algebra. Symmetry 2024, 16, 491. [Google Scholar] [CrossRef]
- Si, K.W.; Wang, Q.W.; Xie, L.M. A classical system of matrix equations over the split quaternion algebra. Adv. Appl. Clifford Algebras. 2024, 34, 51. [Google Scholar] [CrossRef]
- Clifford, W.K. Preliminary sketch of bi-quaternions. Proc. Lond. Math. Soc. 1873, 4, 381–395. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Q.W.; Xie, L.M. Dual quaternion matrix equation AXB = C with applications. Symmetry 2024, 16, 287. [Google Scholar] [CrossRef]
- Kula, L.; Yaylı, Y. Dual split quaternions and screw motions in Minkowski 3-space. Iran. J. Sci. Technol. Trans. A Sci. 2006, 30, 245–258. [Google Scholar] [CrossRef]
- Diatta, A.; Manga, B.; Sy, F. On dual quaternions, dual split quaternions and Cartan-Schouten metrics on perfect Lie groups. arXiv 2023, arXiv:2310.02114. [Google Scholar] [CrossRef]
- Erdoğdu, M.; Özdemir, M. Split quaternion matrix representation of dual split quaternions and their matrices. Adv. Appl. Clifford Algebr. 2015, 13, 787–798. [Google Scholar] [CrossRef]
- Atasoy, A.; Ata, E.; Yayli, Y.; Kemer, Y. A new polar representation for split and dual split quaternions. Adv. Appl. Clifford Algebras. 2017, 27, 2307–2319. [Google Scholar] [CrossRef]
- Rao, C.R.; Mitra, S.K. Further contributions to the theory of generalized inverse of matrices and its applications. Sankhyā Indian J. Stat. 1971, 33, 289–300. Available online: http://www.jstor.org/stable/25049740 (accessed on 7 November 2024).
- Khatri, C.G.; Mitra, S.K. Hermitian and nonnegative definite solutions of linear matrix equations. SIAM J. Appl. Math. 1976, 31, 579–585. [Google Scholar] [CrossRef]
- Wang, Q.W. Bisymmetric and centrosymmetric solutions to systems of real quaternion matrix equations. Comput. Math. Appl. 2005, 49, 641–650. [Google Scholar] [CrossRef]
- Li, F.L.; Hu, X.Y.; Zhang, L. The generalized reflexive solution for a class of matrix Equations (AX = B,XC = D). Acta Math. Sci. 2008, 28, 185–193. [Google Scholar] [CrossRef]
- Yuan, Y. Least-squares solutions to the matrix equations AX = B, XC = D. Appl. Math. Comput. 2010, 216, 3120–3125. [Google Scholar] [CrossRef]
- Xie, L.M.; Wang, Q.W. A system of dual quaternion matrix equations with its applications. arXiv 2023, arXiv:2312.10037. [Google Scholar] [CrossRef]
- Wang, Q.W.; Lv, R.Y.; Zhang, Y. The least-squares solution with the least norm to a system of tensor equations over the quaternion algebra. Linear Multilinear Algebra 2020, 70, 1942–1962. [Google Scholar] [CrossRef]
- Wang, Q.W.; Xu, X. Iterative algorithms for solving some tensor equations. Linear Multilinear Algebra 2018, 67, 1325–1349. [Google Scholar] [CrossRef]
- Liang, M.L.; Zheng, B.; Zhao, R.J. Tensor inversion and its application to tensor equation with Einstein product. Linear Multilinear Algebra. 2018, 67, 843–870. [Google Scholar] [CrossRef]
- Xie, M.; Wang, Q.W. Reducible solution to a quaternion tensor equation. Front. Math. China 2020, 15, 1047–1070. [Google Scholar] [CrossRef]
- Xie, M.; Wang, Q.W.; Zhang, Y. The minimum-norm least squares solutions to quaternion tensor systems. Symmetry 2022, 14, 1460. [Google Scholar] [CrossRef]
- He, Z.H.; Navasca, C.; Wang, Q.W. Tensor decompositions and tensor equations over quaternion algebra. arXiv 2017, arXiv:1710.07552. [Google Scholar] [CrossRef]
- Qi, L.Q.; Ling, C.; Yan, H. Dual quaternions and dual quaternion Vectors. Commun. Appl. Math. Comput. 2022, 4, 1494–1508. [Google Scholar] [CrossRef]
- Liu, X.; He, Z.H. On the split quaternion matrix equation. Banach J. Math. Anal. 2020, 14, 228–248. [Google Scholar] [CrossRef]
- Einstein, A. The Formal Foundation of the General Theory of Relativity. Sitzungsber. Preuss. Akad. Wiss. Berlin (Math. Phys.) 1914, 1030–1085. Available online: https://inspirehep.net/literature/42607 (accessed on 7 November 2024).
- Sun, L.; Zheng, B.; Bu, C.; Wei, Y. Moore-penrose inverse of tensors via einstein product. Linear Multilinear Algebra 2015, 64, 686–698. [Google Scholar] [CrossRef]
- Chen, C.; Surana, A.; Bloch, A.; Rajapakse, I. Multilinear time invariant system theory. arXiv 2019, arXiv:1905.07427. [Google Scholar] [CrossRef]
- Brazell, M.; Li, N.; Navasca, C.; Tamon, C. Solving multilinear systems via tensor inversion. SIAM J. Matrix Anal. Appl. 2013, 34, 542–570. [Google Scholar] [CrossRef]
- He, Z.H.; Wang, Q.W. The general solutions to some systems of matrix equations. Linear Multilinear Algebra 2015, 63, 2017–2032. [Google Scholar] [CrossRef]
- Eduardo, B.C.; Zuleima, V.F.; Ulises, U.L. The lorentz group using conformal geometric algebra and split quaternions for color image processing: Theory and practice. IEEE Access 2023, 11, 56785–56800. [Google Scholar] [CrossRef]
- Zhang, X.F.; Li, T.; Ou, Y.G. Iterative solutions of generalized Sylvester quaternion tensor equations. Linear Multilinear Algebra 2023, 72, 1259–1278. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).