
Linearly Implicit Conservative Schemes for the Nonlocal Schrödinger Equation

Abstract
1. Introduction
2. Semi-Discrete Conservative System
2.1. Structure-Preserving Spatial Discretization
2.2. Semi-Discrete System
3. Equivalent System with ESAV Approach
4. Linearly Implicit Energy-Preserving Schemes
4.1. Symplectic RK Methods
4.2. Construction of the Linearly Implicit Schemes
- Obtaining convergence analysis results for high-dimensional problems is a challenging task.
- Incorporating a new variable and extrapolation techniques into the numerical schemes adds complexity to the system, making it harder to establish the convergence of the proposed schemes.
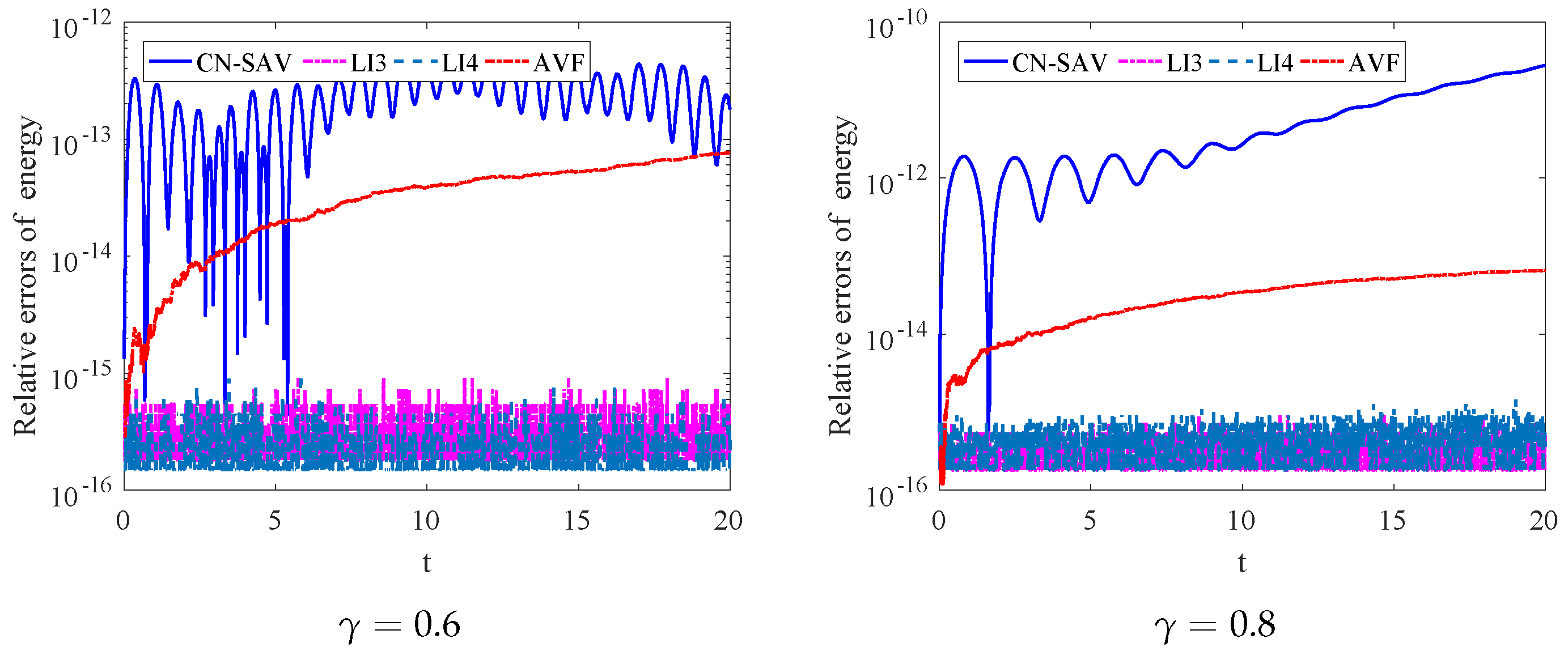
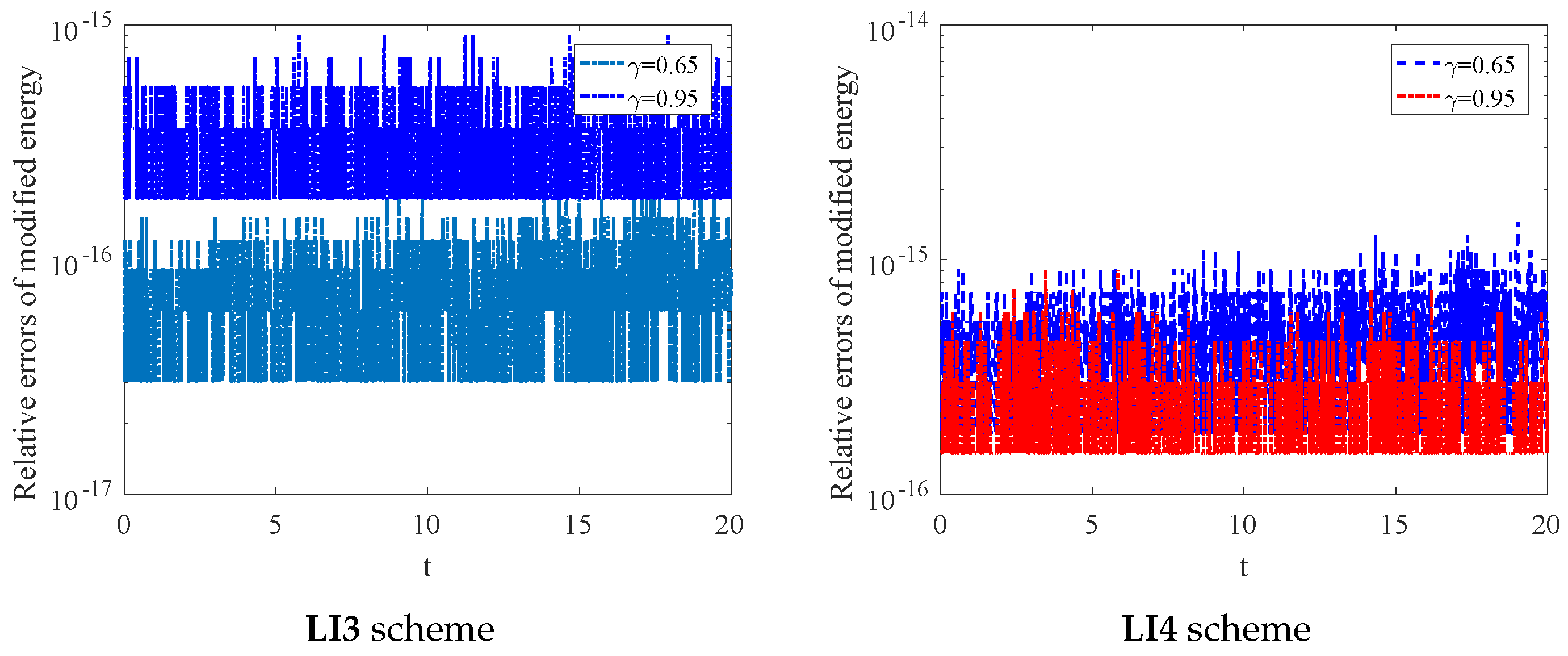
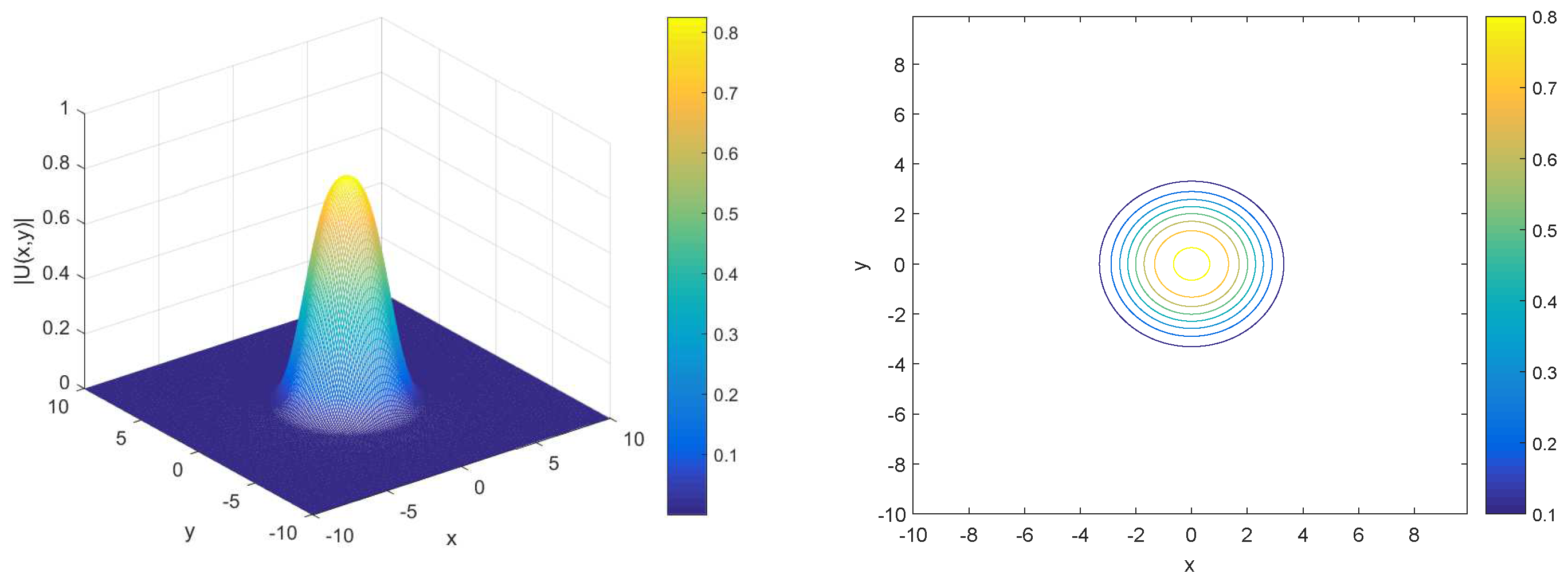
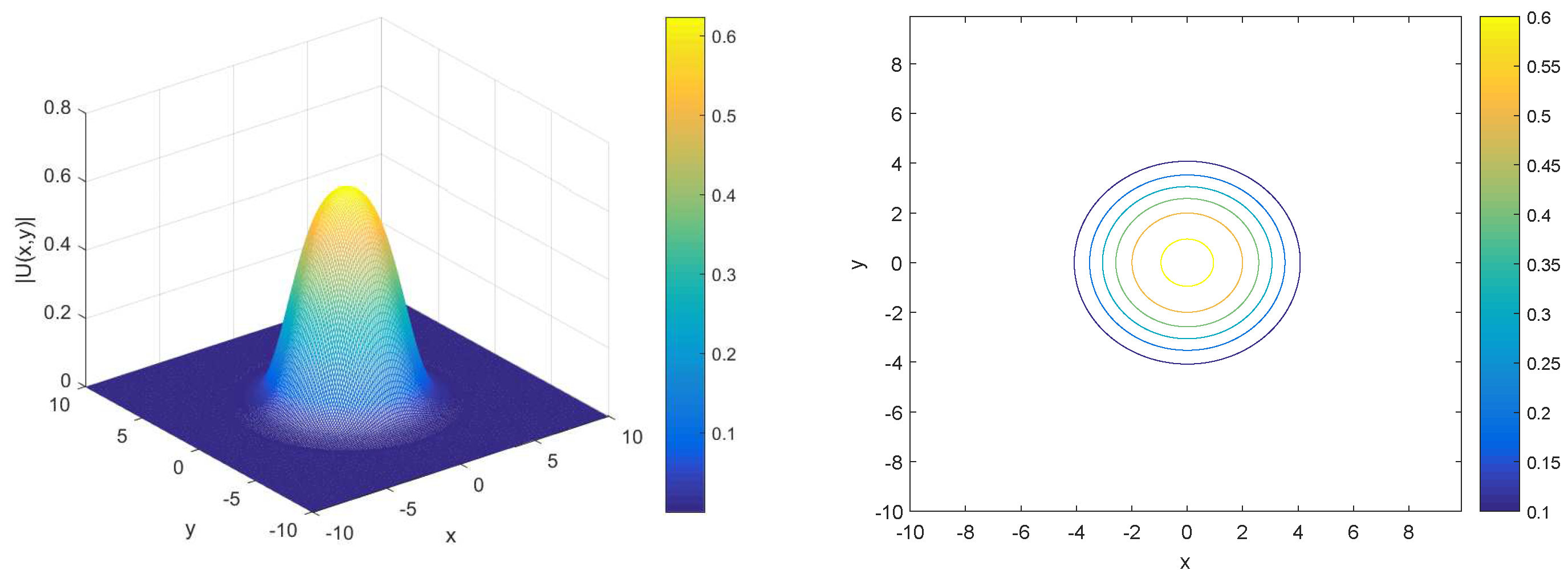
5. Numerical Examples
- CN-SAV: a second-order energy-preserving scheme for the nonlocal wave equation based on the SAV method.
- AVF: a second-order energy-preserving scheme for the nonlocal wave equation based on the averaged vector field (AVF) method.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kittel, C. Introduction to Solid State Physics; Wiley: New York, NY, USA, 2005. [Google Scholar]
- Boyd, R.W. Nonlinear Optics; Academic Press: New York, NY, USA, 2008. [Google Scholar]
- Pethick, C.J.; Smith, H. Bose-Einstein Condensation in Dilute Gases; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Laskin, N. Fractional Schrödinger equation. Phys. Rev. E 2002, 66, 056108. [Google Scholar] [CrossRef] [PubMed]
- Zeng, W.; Xiao, A.; Li, X. Error estimate of Fourier pseudo-spectral method for multidimensional nonlinear complex fractional Ginzburg-Landau equations. Appl. Math. Lett. 2019, 93, 40–45. [Google Scholar] [CrossRef]
- Hassan, A.H. Comparison differential transformation technique with Adomian decomposition method for linear and nonlinear initial value problems. Chaos Solitons Fract. 2008, 36, 53–65. [Google Scholar] [CrossRef]
- Shah, S.; Singh, R. Evolution of singular surface and interaction with a strong shock in reacting polytropic gases using Lie group theory. Int. J. Non-Linear Mech. 2019, 116, 173–180. [Google Scholar] [CrossRef]
- Salkuyeh, D.K.; Ghehsareh, H.R. Convergence of the variational iteration method for the telegraph equation with integral conditions. Numer. Methods Partial Differ. Equ. 2011, 27, 1442–1455. [Google Scholar] [CrossRef]
- Bhrawy, A.H.; Doha, E.H.; Ezz-Eldien, S.S.; Van Gorder, R.A. A new Jacobi spectral collocation method for solving 1+1 fractional Schrödinger equations and fractional coupled Schrödinger systems. Eur. Phys. J. Plus 2014, 129, 260. [Google Scholar] [CrossRef]
- Li, M.; Gu, X.; Huang, C.; Fei, M.; Zhang, G. A fast linearized conservative finite element method for the strongly coupled nonlinear fractional Schrödinger equations. J. Comput. Phys. 2018, 358, 256–282. [Google Scholar] [CrossRef]
- Wang, D.; Xiao, A.; Yang, W. A linearly implicit conservative difference Scheme for the space fractional coupled nonlinear Schrödinger equations. J. Comput. Phys. 2014, 272, 644–655. [Google Scholar] [CrossRef]
- Fu, Y.; Cai, W.; Wang, Y. Structure-preserving algorithms for the two-dimensional fractional Klein-Gordon-Schrödinger equation. Appl. Numer. Math. 2020, 156, 77–93. [Google Scholar] [CrossRef]
- Macías-Díaz, J. Numerical study of the process of nonlinear supratransmission in Riesz space-fractional sine-gordon equations. Commun. Nonlinear Sci. Numer. Simul. 2017, 46, 89–102. [Google Scholar] [CrossRef]
- Wang, P.; Huang, C. A conservative linearized difference Scheme for the nonlinear fractional Schrödinger equation. Numer. Algorithms 2015, 69, 625–641. [Google Scholar] [CrossRef]
- Fu, Y.; Hu, D.; Zhang, G. Arbitrary high-order exponential integrators conservative schemes for the nonlinear Gross-Pitaevskii equation. Comput. Math. Appl. 2022, 121, 102–114. [Google Scholar] [CrossRef]
- Ran, M.; Zhang, C. A conservative difference scheme for solving the strongly coupled nonlinear fractional Schrödinger equations. Commun. Nonlinear Sci. Numer. Simul. 2016, 41, 64–83. [Google Scholar] [CrossRef]
- Wang, P.; Huang, C. Structure-preserving numerical methods for the fractional Schrödinger equation. Appl. Numer. Math. 2018, 129, 137–158. [Google Scholar] [CrossRef]
- Zhao, J.; Li, Y.; Xu, Y. An explicit fourth-order energy-preserving scheme for Riesz space fractional nonlinear wave equations. Appl. Math. Comput. 2019, 351, 124–138. [Google Scholar] [CrossRef]
- Brugnano, L.; Zhang, C.; Li, D. A class of energy-conserving Hamiltonian boundary value methods for nonlinear Schrödinger equation with wave operator. Commun. Nonlinear Sci. Numer. Simul. 2018, 60, 33–49. [Google Scholar] [CrossRef]
- Li, H.; Wang, Y.; Qin, M. A sixth order averaged vector field method. J. Comput. Math. 2016, 34, 479–498. [Google Scholar]
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations; Springer Science: New York, NY, USA, 2006. [Google Scholar]
- Cheng, Q.; Liu, C.; Shen, J. Generalized SAV approaches for gradient systems. J. Comput. Appl. Math. 2021, 3, 113532. [Google Scholar] [CrossRef]
- Shen, J.; Xu, J. Convergence and error analysis for the scalar auxiliary variable (SAV) schemes to gradient flows. J. Comput. Phys. 2018, 56, 2895–2912. [Google Scholar] [CrossRef]
- Shen, J.; Xu, J.; Yang, J. The scalar auxiliary variable (SAV) approach for gradient flows. J. Comput. Phys. 2018, 353, 407–416. [Google Scholar] [CrossRef]
- Shen, J.; Xu, J.; Yang, J. A new class of efficient and robust energy stable schemes for gradient flows. SIAM Rev. 2019, 61, 474–506. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rate | Rate | Rate | Rate | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 0.6 | 0.01 | 4.15 × 10−4 | - | 4.72 × 10−6 | - | 6.47 × 10−7 | - | 5.68 × 10−4 | - |
| 0.005 | 1.06 × 10−4 | 1.97 | 7.33 × 10−7 | 2.69 | 4.99 × 10−8 | 3.69 | 1.46 × 10−4 | 1.96 | |
| 0.0025 | 2.68 × 10−5 | 1.98 | 1.02 × 10−7 | 2.85 | 3.43 × 10−9 | 3.86 | 3.68 × 10−5 | 1.99 | |
| 0.8 | 0.01 | 2.24 × 10−5 | - | 1.53 × 10−7 | - | 1.56 × 10−8 | - | 1.79 × 10−3 | - |
| 0.005 | 5.95 × 10−6 | 1.91 | 2.25 × 10−8 | 2.76 | 1.14 × 10−9 | 3.78 | 4.61 × 10−4 | 1.95 | |
| 0.0025 | 1.53 × 10−6 | 1.96 | 3.05 × 10−9 | 2.89 | 7.68 × 10−11 | 3.89 | 1.17 × 10−4 | 1.97 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Li, B.; Fei, M. Linearly Implicit Conservative Schemes for the Nonlocal Schrödinger Equation. Mathematics 2024, 12, 3339. https://doi.org/10.3390/math12213339
Zhang Y, Li B, Fei M. Linearly Implicit Conservative Schemes for the Nonlocal Schrödinger Equation. Mathematics. 2024; 12(21):3339. https://doi.org/10.3390/math12213339
Chicago/Turabian StyleZhang, Yutong, Bin Li, and Mingfa Fei. 2024. "Linearly Implicit Conservative Schemes for the Nonlocal Schrödinger Equation" Mathematics 12, no. 21: 3339. https://doi.org/10.3390/math12213339
APA StyleZhang, Y., Li, B., & Fei, M. (2024). Linearly Implicit Conservative Schemes for the Nonlocal Schrödinger Equation. Mathematics, 12(21), 3339. https://doi.org/10.3390/math12213339