
Joint Approach for Vehicle Routing Problems Based on Genetic Algorithm and Graph Convolutional Network

Abstract
1. Introduction
- (1)
- A new algorithm for solving large-scale VRPs with multiple distribution centers is proposed by integrating the ideas of GA and GCN. The proposed method uses GCN to directly extract features from the topology graph without the need for data preprocessing. Additionally, the solution process of the VRP does not rely on any manually designed heuristic operation methods. For VRP instances with the same or similar features, results can be obtained directly, leading to high-quality solutions in a short time.
- (2)
- In larger-scale instances, this method uses a genetic algorithm to divide complex problems, reducing the search space and effectively avoiding the issue of dimensional explosion.
- (3)
- In cases where the problem’s constraints change, a solution that satisfies the constraints can be obtained by simply modifying the encoding method of the genetic algorithm, fully leveraging the existing learning experience without the need for retraining.
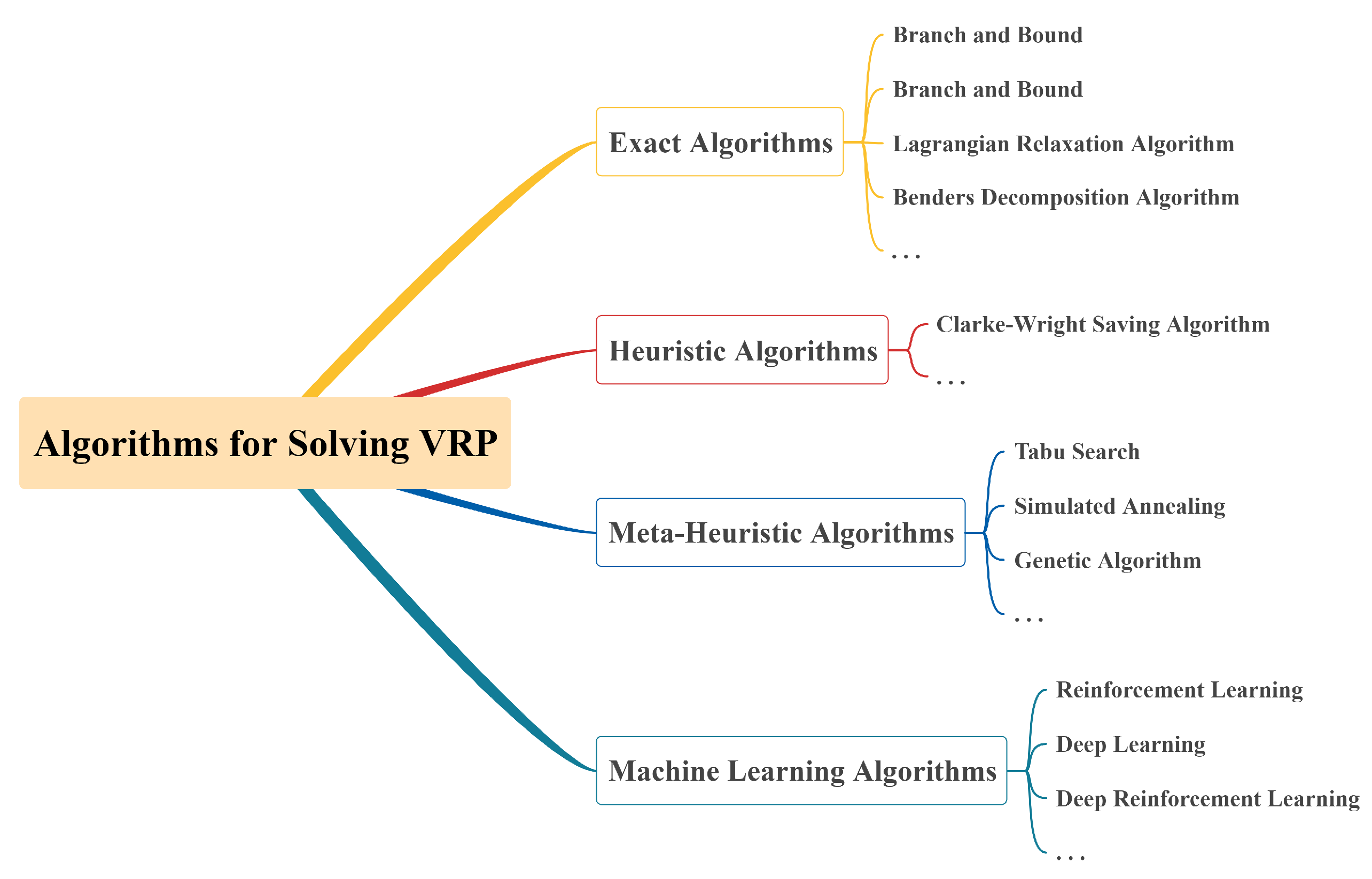
2. Related Work
3. Multi-Decoder Architecture for Solving VRPs
- (1)
- Node constraint: As shown in Equation (4), each node must be visited and visited only once.
- (2)
- Path constraints: As shown in Equation (5), each vehicle’s path must start at node 0 and end at node 0.
- (3)
- Flow conservation constraints: As shown in Equation (6), for any node (including node 0), after the flow enters the node, an equal amount of flow must exit the node.
- (4)
- Binary constraint: .
- (5)
- For CVRP, there is a vehicle capacity constraint, as shown in Equation (7):where represents the demand of node j, and represents the capacity of vehicle k.
3.1. GCN
- (1)
- Feature Aggregation: For each node, the feature update is given by Equation (8):where is the node feature matrix at layer l, A is the adjacency matrix of the graph, D is the degree matrix, is the learnable weight matrix at layer l, and is the activation function (such as ReLU).
- (2)
- Input Feature Matrix: In the first layer of GCN, the input feature matrix is usually:where X is the feature matrix of the input nodes.
- (3)
- Multi-Layer Stacking: By stacking multiple layers, the final output feature matrix is shown in Equation (10):where L denotes the total number of layers.
- (4)
- Classification Output: Finally, the classification result output through the fully connected layer is:
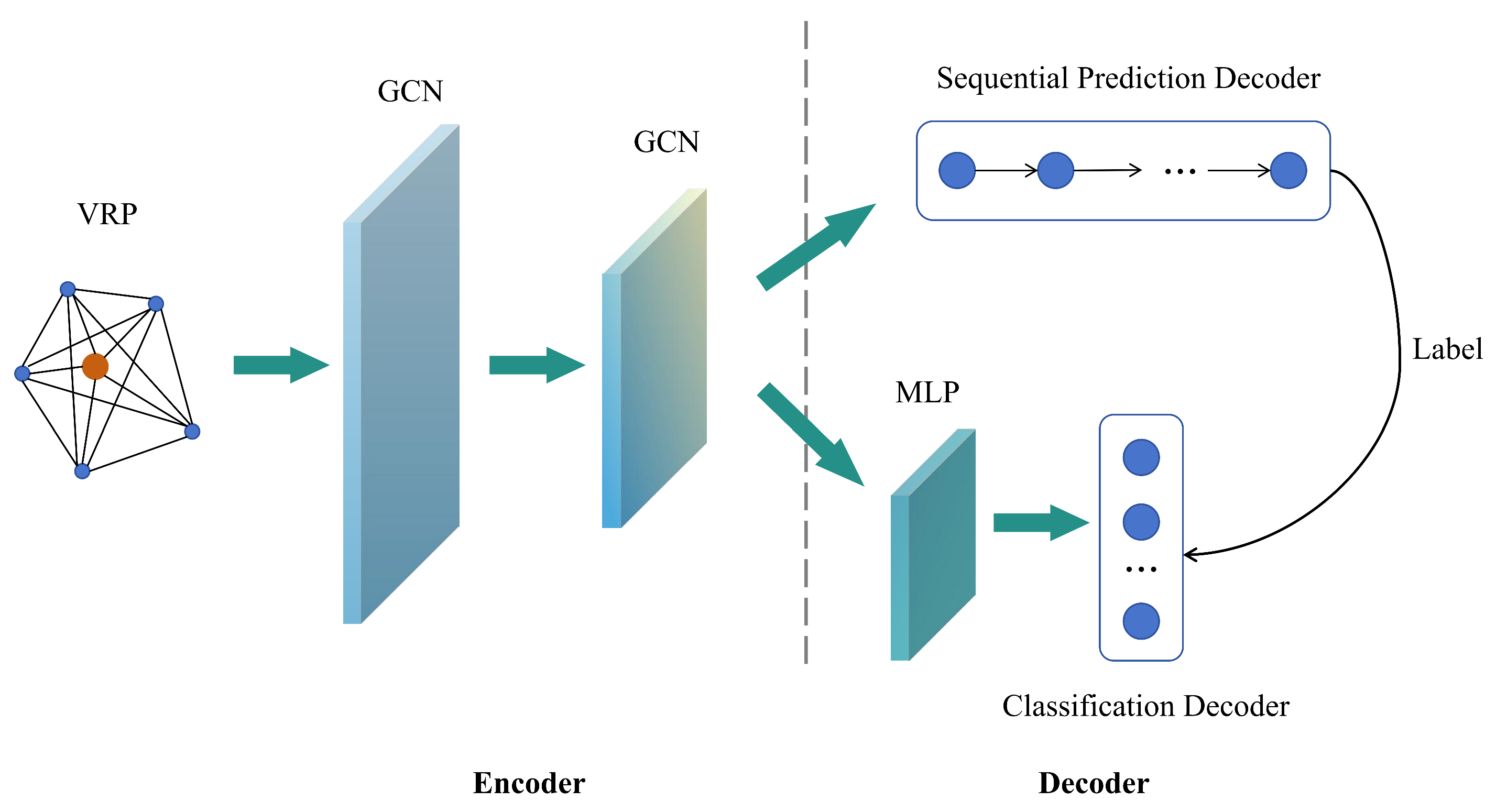
3.2. A New Solution Framework
3.3. REINFORCE Algorithm
4. A Joint Approach Based on GA and GCN
- (1)
- Use the heuristic method to allocate the customer nodes, in which a greedy approach is adopted. For any customer node , calculate the Euclidean distance between it and the distribution center node and assign it to the nearest distribution center.
- (2)
- Split the multi-distribution center VRP into p individual VRPs using the method above. Integer encoding is employed to represent the allocation of distribution vehicles, that is, a p-dimensional vector is encoded, where each component of the vector represents the number of vehicles allocated to the corresponding distribution center node.
- (3)
- Use the multi-decoder solution framework to solve the VRP with a fixed number of vehicles and output the optimal policy .
- (4)
- Calculate cost according to Equation (3). The fitness function f can be represented by the following formula:
- (5)
- Use the GA to optimize the allocation plan and output the optimum policy under the optimal allocation plan.
| Algorithm 1 Joint Approach Based on GA and GCN |
|
5. Experimental Results
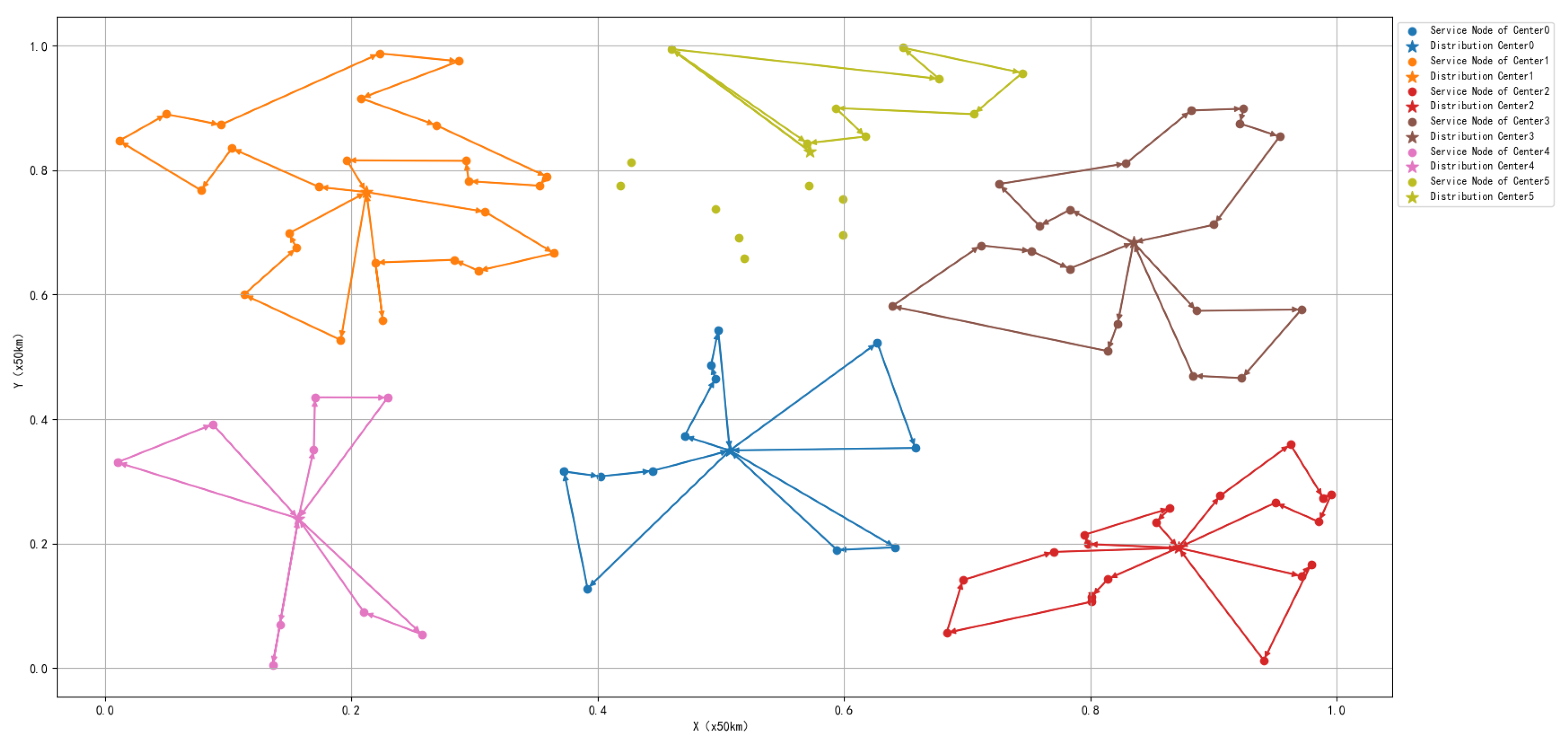
- (1)
- Minimum constraint: Each center is assigned at least one team.
- (2)
- Capacity constraint: Each team is required to perform distribution tasks but is responsible for a maximum of 10 service nodes.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Toth, P.; Vigo, D. The Vehicle Routing Problem; SIAM: Philadelphia, PA, USA, 2002. [Google Scholar]
- Dantzig, G.B.; Ramser, J.H. The truck dispatching problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Ralphs, T.K.; Kopman, L.; Pulleyblank, W.R.; Trotter, L.E. On the capacitated vehicle routing problem. Math. Program. 2003, 94, 343–359. [Google Scholar] [CrossRef]
- Tan, K.C.; Lee, L.H.; Zhu, Q.; Ou, K. Heuristic methods for vehicle routing problem with time windows. Artif. Intell. Eng. 2001, 15, 281–295. [Google Scholar] [CrossRef]
- Archetti, C.; Speranza, M.G. The split delivery vehicle routing problem: A survey. In The Vehicle Routing Problem: Latest Advances and New Challenges; Springer: Boston, MA, USA, 2008; pp. 103–122. [Google Scholar]
- Song, H.; Triguero, I.; Özcan, E. A review on the self and dual interactions between machine learning and optimisation. Prog. Artif. Intell. 2019, 8, 143–165. [Google Scholar] [CrossRef]
- Ni, Q.; Tang, Y. A bibliometric visualized analysis and classification of vehicle routing problem research. Sustainability 2023, 15, 7394. [Google Scholar] [CrossRef]
- Laporte, G.; Nobert, Y. Exact algorithms for the vehicle routing problem. In North-Holland Mathematics Studies; Elsevier: Amsterdam, The Netherlands, 1987; Volume 132, pp. 147–184. [Google Scholar]
- Kokash, N. An Introduction to Heuristic Algorithms; Department of Informatics and Telecommunications: Trento, Italy, 2005; pp. 1–8. [Google Scholar]
- Beheshti, Z.; Shamsuddin, S.M.H. A review of population-based meta-heuristic algorithms. Int. J. Adv. Soft Comput. Appl. 2013, 5, 1–35. [Google Scholar]
- Dietterich, T.G. Machine learning. Annu. Rev. Comput. Sci. 1990, 4, 255–306. [Google Scholar] [CrossRef]
- Lawler, E.L.; Wood, D.E. Branch-and-bound methods: A survey. Oper. Res. 1966, 14, 699–719. [Google Scholar] [CrossRef]
- Vanderbeck, F. Branching in branch-and-price: A generic scheme. Math. Program. 2011, 130, 249–294. [Google Scholar] [CrossRef]
- Fisher, M.L. An applications oriented guide to Lagrangian relaxation. Interfaces 1985, 15, 10–21. [Google Scholar] [CrossRef]
- Geoffrion, A.M. Generalized benders decomposition. J. Optim. Theory Appl. 1972, 10, 237–260. [Google Scholar] [CrossRef]
- Lysgaard, J.; Letchford, A.N.; Eglese, R.W. A new branch-and-cut algorithm for the capacitated vehicle routing problem. Math. Program. 2004, 100, 423–445. [Google Scholar] [CrossRef]
- Barnhart, C.; Johnson, E.L.; Nemhauser, G.L.; Savelsbergh, M.W.; Vance, P.H. Branch-and-price: Column generation for solving huge integer programs. Oper. Res. 1998, 46, 316–329. [Google Scholar] [CrossRef]
- Fukasawa, R.; Longo, H.; Lysgaard, J.; Aragão, M.P.d.; Reis, M.; Uchoa, E.; Werneck, R.F. Robust branch-and-cut-and-price for the capacitated vehicle routing problem. Math. Program. 2006, 106, 491–511. [Google Scholar] [CrossRef]
- Luo, Z.; Qin, H.; Zhu, W.; Lim, A. Branch and price and cut for the split-delivery vehicle routing problem with time windows and linear weight-related cost. Transp. Sci. 2017, 51, 668–687. [Google Scholar] [CrossRef]
- Li, J.; Qin, H.; Baldacci, R.; Zhu, W. Branch-and-price-and-cut for the synchronized vehicle routing problem with split delivery, proportional service time and multiple time windows. Transp. Res. Part E Logist. Transp. Rev. 2020, 140, 101955. [Google Scholar] [CrossRef]
- Ropke, S.; Cordeau, J.F. Branch and cut and price for the pickup and delivery problem with time windows. Transp. Sci. 2009, 43, 267–286. [Google Scholar] [CrossRef]
- Clarke, G.; Wright, J.W. Scheduling of vehicles from a central depot to a number of delivery points. Oper. Res. 1964, 12, 568–581. [Google Scholar] [CrossRef]
- Altınel, İ.K.; Öncan, T. A new enhancement of the Clarke and Wright savings heuristic for the capacitated vehicle routing problem. J. Oper. Res. Soc. 2005, 56, 954–961. [Google Scholar] [CrossRef]
- Li, H.; Chang, X.; Zhao, W.; Lu, Y. The vehicle flow formulation and savings-based algorithm for the rollon-rolloff vehicle routing problem. Eur. J. Oper. Res. 2017, 257, 859–869. [Google Scholar] [CrossRef]
- Bauer, J.; Lysgaard, J. The offshore wind farm array cable layout problem: A planar open vehicle routing problem. J. Oper. Res. Soc. 2015, 66, 360–368. [Google Scholar] [CrossRef]
- Glover, F. Heuristics for integer programming using surrogate constraints. Decis. Sci. 1977, 8, 156–166. [Google Scholar] [CrossRef]
- Glover, F. Tabu search—Part I. ORSA J. Comput. 1989, 1, 190–206. [Google Scholar] [CrossRef]
- Glover, F. Tabu search—Part II. ORSA J. Comput. 1990, 2, 4–32. [Google Scholar] [CrossRef]
- Zachariadis, E.E.; Tarantilis, C.D.; Kiranoudis, C.T. A guided tabu search for the vehicle routing problem with two-dimensional loading constraints. Eur. J. Oper. Res. 2009, 195, 729–743. [Google Scholar] [CrossRef]
- Metropolis, N.; Rosenbluth, A.W.; Rosenbluth, M.N.; Teller, A.H.; Teller, E. Equation of state calculations by fast computing machines. J. Chem. Phys. 1953, 21, 1087–1092. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D., Jr.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Li, B.; Yang, X.; Xuan, H. A hybrid simulated annealing heuristic for multistage heterogeneous fleet scheduling with fleet sizing decisions. J. Adv. Transp. 2019, 2019, 5364201. [Google Scholar] [CrossRef]
- Mu, D.; Wang, C.; Wang, S.; Zhou, S. Solving TDVRP based on parallel-simulated annealing algorithm. Comput. Integr. Manuf. Syst. 2015, 21, 1626–1636. [Google Scholar]
- Li, X.; Chen, N.; Ma, H.; Nie, F.; Wang, X. A Parallel Genetic Algorithm With Variable Neighborhood Search for the Vehicle Routing Problem in Forest Fire-Fighting. IEEE Trans. Intell. Transp. Syst. 2024, 15, 14359–14375. [Google Scholar] [CrossRef]
- Stodola, P.; Kutěj, L. Multi-Depot Vehicle Routing Problem with Drones: Mathematical formulation, solution algorithm and experiments. Expert Syst. Appl. 2024, 241, 122483. [Google Scholar] [CrossRef]
- Wu, Q.; Xia, X.; Song, H.; Zeng, H.; Xu, X.; Zhang, Y.; Yu, F.; Wu, H. A neighborhood comprehensive learning particle swarm optimization for the vehicle routing problem with time windows. Swarm Evol. Comput. 2024, 84, 101425. [Google Scholar] [CrossRef]
- Desale, S.; Rasool, A.; Andhale, S.; Rane, P. Heuristic and meta-heuristic algorithms and their relevance to the real world: A survey. Int. J. Comput. Eng. Res. Trends 2015, 351, 2349–7084. [Google Scholar]
- Adamo, T.; Gendreau, M.; Ghiani, G.; Guerriero, E. A review of recent advances in time-dependent vehicle routing. Eur. J. Oper. Res. 2024, 319, 1–15. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J.; Hastie, T.; Tibshirani, R.; Friedman, J. Overview of supervised learning. In The Elements of Statistical Learning: Data Mining, Inference, and Prediction; Springer: New York, NY, USA, 2009; pp. 9–41. [Google Scholar]
- Barlow, H.B. Unsupervised learning. Neural Comput. 1989, 1, 295–311. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement learning: An introduction. Robotica 1999, 17, 229–235. [Google Scholar] [CrossRef]
- Abiodun, O.I.; Jantan, A.; Omolara, A.E.; Dada, K.V.; Mohamed, N.A.; Arshad, H. State-of-the-art in artificial neural network applications: A survey. Heliyon 2018, 4, e00938. [Google Scholar] [CrossRef]
- Lipton, Z.C.; Berkowitz, J.; Elkan, C. A critical review of recurrent neural networks for sequence learning. arXiv 2015, arXiv:1506.00019. [Google Scholar]
- Vinyals, O.; Fortunato, M.; Jaitly, N. Pointer networks. Adv. Neural Inf. Process. Syst. 2015, 28, 2692–2700. [Google Scholar]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Philip, S.Y. A comprehensive survey on graph neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4–24. [Google Scholar] [CrossRef]
- Bello, I.; Pham, H.; Le, Q.V.; Norouzi, M.; Bengio, S. Neural combinatorial optimization with reinforcement learning. arXiv 2016, arXiv:1611.09940. [Google Scholar]
- Nazari, M.; Oroojlooy, A.; Snyder, L.; Takác, M. Reinforcement learning for solving the vehicle routing problem. Adv. Neural Inf. Process. Syst. 2018, 31, 9861–9871. [Google Scholar]
- Scarselli, F.; Gori, M.; Tsoi, A.C.; Hagenbuchner, M.; Monfardini, G. The graph neural network model. IEEE Trans. Neural Netw. 2008, 20, 61–80. [Google Scholar] [CrossRef] [PubMed]
- Ma, Q.; Ge, S.; He, D.; Thaker, D.; Drori, I. Combinatorial optimization by graph pointer networks and hierarchical reinforcement learning. arXiv 2019, arXiv:1911.04936. [Google Scholar]
- Khalil, E.; Dai, H.; Zhang, Y.; Dilkina, B.; Song, L. Learning combinatorial optimization algorithms over graphs. Adv. Neural Inf. Process. Syst. 2017, 30, 6351–6361. [Google Scholar]
- Mittal, A.; Dhawan, A.; Medya, S.; Ranu, S.; Singh, A. Learning heuristics over large graphs via deep reinforcement learning. arXiv 2019, arXiv:1903.03332. [Google Scholar]
- Hu, Y.; Zhang, Z.; Yao, Y.; Huyan, X.; Zhou, X.; Lee, W.S. A bidirectional graph neural network for traveling salesman problems on arbitrary symmetric graphs. Eng. Appl. Artif. Intell. 2021, 97, 104061. [Google Scholar] [CrossRef]
- Díaz de León-Hicks, E.; Conant-Pablos, S.E.; Ortiz-Bayliss, J.C.; Terashima-Marín, H. Addressing the algorithm selection problem through an attention-based meta-learner approach. Appl. Sci. 2023, 13, 4601. [Google Scholar] [CrossRef]
- Singgih, I.K.; Singgih, M.L. Regression Machine Learning Models for the Short-Time Prediction of Genetic Algorithm Results in a Vehicle Routing Problem. World Electr. Veh. J. 2024, 15, 308. [Google Scholar] [CrossRef]
- Fitzpatrick, J.; Ajwani, D.; Carroll, P. A scalable learning approach for the capacitated vehicle routing problem. Comput. Oper. Res. 2024, 171, 106787. [Google Scholar] [CrossRef]
- Lagos, F.; Pereira, J. Multi-armed bandit-based hyper-heuristics for combinatorial optimization problems. Eur. J. Oper. Res. 2024, 312, 70–91. [Google Scholar] [CrossRef]
- Kim, G.; Ong, Y.S.; Heng, C.K.; Tan, P.S.; Zhang, N.A. City vehicle routing problem (city VRP): A review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1654–1666. [Google Scholar] [CrossRef]
- Medsker, L.R.; Jain, L. Recurrent neural networks. Des. Appl. 2001, 5, 2. [Google Scholar]
- Graves, A.; Graves, A. Long short-term memory. In Supervised Sequence Labelling with Recurrent Neural Networks; Springer: Berlin/Heidelberg, Germany, 2012; pp. 37–45. [Google Scholar]
- Tang, J.; Deng, C.; Huang, G.B. Extreme learning machine for multilayer perceptron. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 809–821. [Google Scholar] [CrossRef] [PubMed]
- Cho, K. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Google. Google or-Tools. Available online: https://developers.google.com/optimization/ (accessed on 2 October 2024).
- Kool, W.; Van Hoof, H.; Welling, M. Attention, learn to solve routing problems! arXiv 2018, arXiv:1803.08475. [Google Scholar]
- Helsgaun, K. An extension of the Lin-Kernighan-Helsgaun TSP solver for constrained traveling salesman and vehicle routing problems. Rosk. Rosk. Univ. 2017, 12, 966–980. [Google Scholar]
- Duan, L.; Zhan, Y.; Hu, H.; Gong, Y.; Wei, J.; Zhang, X.; Xu, Y. Efficiently solving the practical vehicle routing problem: A novel joint learning approach. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Online, 6–10 July 2020; pp. 3054–3063. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| greedy learning rate | 0.9 |
| learning rate | 0.01 |
| max epochs | 10,000 |
| discount factor | 0.9 |
| batch size | 32 |
| normalization parameters | 50 |
| population size | 300 |
| maximum number of iterations | 500 |
| crossover probability | 0.5 |
| mutation probability | 0.1 |
| Distribution | Single Decoder Approach | Multi-Decoder Approach | Joint Approach | |||
|---|---|---|---|---|---|---|
| (×50 km) | /s | (×50 km) | /s | (×50 km) | /s | |
| 1 | F | 15.29 | 85.38 | 16.56 | 11.52 | 37.73 |
| 2 | F | 17.66 | 114.18 | 19.12 | 11.68 | 37.71 |
| 3 | F | 12.48 | 73.46 | 19.06 | 11.85 | 37.16 |
| 4 | F | 14.28 | 101.55 | 16.51 | 13.14 | 38.52 |
| 5 | 12.60 | 16.36 | 96.11 | 16.63 | 12.47 | 38.26 |
| 6 | F | 13.27 | 104.11 | 19.20 | 12.31 | 36.96 |
| 7 | F | 14.17 | 87.49 | 18.71 | 11.71 | 37.55 |
| 8 | F | 15.66 | 64.50 | 19.55 | 11.16 | 36.61 |
| 9 | 12.08 | 13.42 | 130.70 | 22.81 | 11.98 | 37.35 |
| 10 | F | 15.75 | 90.41 | 16.39 | 11.80 | 36.76 |
| 11 | F | 12.99 | 105.62 | 20.43 | 11.46 | 36.49 |
| 12 | F | 15.69 | 90.89 | 17.46 | 11.60 | 37.46 |
| 13 | F | 14.10 | 175.63 | 19.58 | 11.78 | 37.65 |
| 14 | F | 12.39 | 100.54 | 16.33 | 10.67 | 37.27 |
| 15 | F | 13.51 | 74.37 | 19.50 | 11.99 | 37.66 |
| Instance Sets | Number of Service Nodes | Vehicle Capacities | Data Size (Train/Test) |
|---|---|---|---|
| VRP50 | 50 | 40 | 50,000/10,000 |
| VRP200 | 200 | 60 | 25,600/5000 |
| VRP400 | 400 | 80 | 25,600/5000 |
| Instance Sets | Methods | ||||
|---|---|---|---|---|---|
| OR-Tools | PRL | AM | GCN-NPEC | GCN-GA | |
| VRP50 | 7.61 (0.00%) | 7.79 (2.37%) | 7.64 (0.39%) | 7.67 (0.79%) | 7.71 (1.31%) |
| VRP200 | 18.01 (0.00%) | 20.12 (11.71%) | 18.86 (4.72%) | 17.81 (−1.11%) | 17.89 (−0.67%) |
| VRP400 | 28.13 (0.00%) | 30.25 (7.54%) | 29.78 (5.87%) | 27.05 (−3.84%) | 26.89 (−4.41%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, D.; Zhao, Y.; Wang, Z.; Wang, W.; Pi, L.; Li, L. Joint Approach for Vehicle Routing Problems Based on Genetic Algorithm and Graph Convolutional Network. Mathematics 2024, 12, 3144. https://doi.org/10.3390/math12193144
Qi D, Zhao Y, Wang Z, Wang W, Pi L, Li L. Joint Approach for Vehicle Routing Problems Based on Genetic Algorithm and Graph Convolutional Network. Mathematics. 2024; 12(19):3144. https://doi.org/10.3390/math12193144
Chicago/Turabian StyleQi, Dingding, Yingjun Zhao, Zhengjun Wang, Wei Wang, Li Pi, and Longyue Li. 2024. "Joint Approach for Vehicle Routing Problems Based on Genetic Algorithm and Graph Convolutional Network" Mathematics 12, no. 19: 3144. https://doi.org/10.3390/math12193144
APA StyleQi, D., Zhao, Y., Wang, Z., Wang, W., Pi, L., & Li, L. (2024). Joint Approach for Vehicle Routing Problems Based on Genetic Algorithm and Graph Convolutional Network. Mathematics, 12(19), 3144. https://doi.org/10.3390/math12193144