Abstract
This paper investigates the fault-tolerant control problem for vehicular platoons with time-varying actuator fault directions and distance constraints. A bias constraint function is introduced to convert the asymmetric constraints into symmetric ones, based on which a unified barrier Lyapunov function (BLF) method is proposed to ensure distance constraints. Further, an adaptive fixed-time fault-tolerant controller in the context of a sliding mode control technique is proposed, wherein a new Nussbaum function is adopted to address the effects of unknown time-varying actuator fault directions. It is proved that both individual vehicle stability and string stability can all be guaranteed, and the effectiveness of the proposed algorithm is verified through numerical simulations.
Keywords:
vehicular platoon; fixed-time sliding mode control; distance constraints; Nussbaum function; symmetric barrier Lyapunov function; time-varying actuator fault directions MSC:
47N70
1. Introduction
Due to the good interaction between vehicles, vehicular platoon control, as an important part of an intelligent transportation system (ITS), has shown great potential to deal with various traffic issues, such as traffic congestion, air pollution, highway safety and so on [1,2,3]. Driving at a small distance can reduce the air resistance on the vehicle, which in turn reduces fuel consumption and increases road capacity [4]. Yet, it is known that small gaps between connected vehicles are the most likely to cause collisions. To this end, distance constraints, from the safety perspective, are issues that are worth investigating [5,6]. At present, there are two main effective methods proposed to deal with spacing constraints, namely, the prescribed performance control method [7,8] and the barrier Lyapunov function (BLF) method [9], among which the BLF method can satisfy stability and safety requirements at the same time, as described in [10,11], which promotes its application in vehicular platoon control. The work in [9] focuses on dealing with symmetric and asymmetric distance restrictions by utilizing symmetric and asymmetric BLF, respectively, and more similar results can be found in [12,13,14]. It is worth noting that the results above depend on the type (i.e., symmetric and asymmetric) of distance constraints, which are time-varying and not available previously, in some cases.
Actuator fault, as a common type of actuator nonlinearity, is an inevitable factor that may degrade system performance, and even lead to system instability for a practical physical system [15,16]. In recent years, researchers have made great contributions to the fault-tolerant control of vehicles [8,9,14,17,18,19]. However, most existing results are all based on the classical actuator fault model, and more attention has been paid to the loss of effectiveness and bias fault, yet the direction of the fault is ignored. As we all know, the direction of the fault varies with time and may be unknown in the actual operation. Therefore, it is of great theoretical and practical significance to achieve the fault tolerance of actuator fault with unknown directions. To handle an actuator fault with unknown directions, the Nussbaum function technique is adopted in [9,14], which is also used to in this paper but for a third-order nonlinear vehicular platoon system, and string stability is also considered.
Inspired by the aforementioned analysis, a novel adaptive fixed-time fault-tolerant control scheme is designed for a third-order vehicular platoon system with unknown actuator fault directions and distance constraints. The main contributions are summarized as follows:
- (1)
- A new Nussbaum function with smaller amplitudes is designed, with which the unknown time-varying actuator fault directions are dealt with, without depending on the precise boundary values for the efficiency loss factor.
- (2)
- A unified BLF method based on the bias constraint function is proposed, which can transform the asymmetric constraint into a symmetric one, making the control design simpler.
- (3)
- Together with the proposed Nussbaum function and BLF method, an adaptive fixed-time sliding mode control scheme is developed for a third-order platoon system, with which the individual vehicle stability and string stability can all be guaranteed within a settling time.
2. Preliminaries and Problem Formulation
2.1. Preliminaries
Lemma 1
([20]). For the continuous radially unbounded function such that
where , , , , if , then is globally fixed-time stable (GFxTS), and the settling time T is bounded as
otherwise, if , then the system is practically fixed-time stable (PFxTS). Moreover, the residual set of the system is
where is scalar and satisfies , and the settling time T is bounded as
Lemma 2
([21]). The following inequalities hold
when , , , , and .
Lemma 3
([22]). For positive parameters , one has
Lemma 4
([23]). For any positive constant ϵ, we have
Lemma 5
([24]). There exist two smooth functions, and , that are defined on , satisfying , , and is a smooth Nussbaum function. , , and must be bounded on , when the following inequality holds:
while is a constant and is a time-varying variable which takes a nonzero value from a closed interval.
2.2. Vehicle Dynamics
In this paper, a concurrent vehicular platoon system, containing N vehicles driving on a straight road (see Figure 1), is considered, and the dynamics for vehicle i () are adopted [18]:
with
and
where , , and denote position, velocity, and acceleration, respectively. denotes the road slope function, and the definitions of the remaining parameters are given in Table 1.
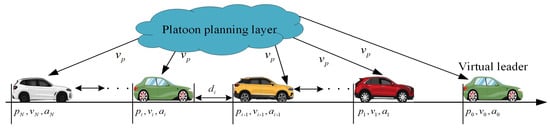
Figure 1.
The interaction structure of a vehicular platoon with a virtual leader.

Table 1.
The Definitions of the Model Parameters.
As a practical physical system, the actuator faults are inevitable. Thus, the actuator fault with time-varying direction is considered [18]:
where and denote the fault efficiency factor and bias fault, respectively, and are unknown fault time instants. The fault direction is determined by , i.e., if , the fault direction is forward, otherwise, the fault direction is in reverse.
As described in [18], the nonlinear function cannot be exactly determined due to parameter uncertainties, which will be approximated by RBFNN technique as:
where is the ideal parameter vector, is the Gaussian basis function vector, and denotes the approximation error satisfying with being an unknown positive constant.
Assumption 1.
The parameters , , and are bounded, i.e., , , with , , and as unknown nonnegative constants.
2.3. Distance Constraints
From Figure 1, it is obvious that vehicle 1 has no preceding car, which makes it difficult to design a controller for it directly. To this end, the virtual vehicle strategy is introduced, with which the controller for each vehicle can be designed under a unified framework. Here, the state of the virtual vehicle (label 0) is defined as with , , and , and can be obtained from the planning layer.
Assumption 2
([25]). The trajectories of , , and are smooth and bounded, where and are the first and second time derivatives of , respectively.
Based on the virtual leader, the distance between two adjacent vehicles is given by:
where is the length of vehicle i.
In practice, collision avoidance and communication connectivity maintenance are crucial performance indexes that, if violated, may lead to platoon system failure. Therefore, the following distance constraints are considered:
where is the minimum distance to prevent collision and is the maximum distance to maintain communication connectivity.
To achieve concurrent control, while avoiding large inter-vehicle distances at high speeds, and improving string stability, a new spacing policy is employed, and then the tracking error is defined as:
where is a desired distance between two adjacent vehicles and satisfies , is the headway time. Together with (16) and (17), the distance constraints are converted into the following error constraint:
where and .
Further, to better handle asymmetric error constraints (i.e., ), the following error transformation is introduced:
where is the bias constraint function.
- Then, the error constraints become
Remark 1.
Compared with the existing methods [9,12,13,14], the proposed bias state transformation-based method in this paper realizes the conversion of asymmetric constraints into symmetric constraints, based on which various types of distance constraints can be guaranteed by the symmetric BLF method. In addition, the given method relaxes the strict constraints on the sign of the constraint state in real time, and avoids the singularity problem that may arise in the derivation of the sign function.
2.4. Control Objectives
In this paper, we aim to develop an adaptive platoon control methodology, such that the following goals are achieved, despite the presence of dynamic uncertainties, unknown disturbances, time-varying actuator faults and distance constraints:
- (1)
- Fixed-time individual vehicle stability: A desired inter-vehicle distance can be maintained in a given time (i.e., and when ).
- (2)
- Fixed-time string stability: After a given time , the inter-vehicle spacing tracking error does not increase along the platoon, that iswhere denotes the Laplace transform of and .
3. Fixed-Time Sliding Mode Surface and Nussbaum Function
3.1. Sliding Mode Surface Design
To ensure that the objective can be realized with a given time, the fixed-time sliding mode surface is designed:
with
where , , and and are positive design constants.
To better guarantee the string stability of the platoon, the following coupled sliding mode surface is adopted [26]:
where is a positive parameter coupling the sliding surfaces and . Noted that the convergence of the sliding mode surface can guarantee the same for .
For subsequent controller design, taking the time derivative of yields
with .
3.2. Nussbaum Function
To solve the issue of unknown time-varying fault directions, the following Nussbaum function technique is adopted:
where . , and are positive constants.
From (28), we can see that is an odd function. Let ; it is obvious that is an even function. By calculation, we have
for , where .
Then, the Nussbaum-type function (28) has the following characteristics:
4. Controller Design and Stability Analysis
By combining the proposed sliding mode surface (22) and Nussbaum function (28), an adaptive fixed-time sliding mode controller (FxTSMC) is designed for following vehicles such that platoon objectives can be achieved in a predefined time.
4.1. Controller Design
In order to ensure the error constraint of , the symmetric BLF is adopted:
where is a positive parameter of the design; when and , ; when and , .
Here, the following reach law is considered:
where , and are positive design constants.
Substituting (31) into (27), the control law is designed as:
with
and
where and are the estimated values and , which can be defined as:
and . is given by:
The adaptation laws of the parameters are designed as follows:
where , and are positive parameters, and is a small positive constant.
4.2. Stability Analysis
We now give the main result in the following theorems and remarks.
Theorem 1.
Consider the vehicle platoon system (13) with time-varying actuator fault directions (12), distance constraints (20), and dynamic uncertainties. By using the Nussbaum function (28) and the symmetric BLF (30), the proposed FxTSMC (32) with the adaptive laws in (34) ensures that the error state transformation and all signals of the closed-loop system (i.e., , , , and ) can be driven near the origin within a fixed time. This approach guarantees the stability of each individual vehicle.
Proof.
The proof consists of the following two steps.
Step 1: Stability analysis in the reaching phase: Consider the following Lyapunov function:
where is the estimation error.
Taking the time derivative of yields:
Based on (23) and (32), can be obtained as:
Further, by left multiplying , we have:
where
Then,
Similarly, together with (34), we have:
According to the Lemma 2, we have:
From (22), is derived as:
Using Lemma 4, we can obtain:
Then we can obtain:
Further, we can have
where
Integrating (55) over , we have
According to Lemma 1 and 5, , and are bounded in , and it can be concluded that the system (55) is PFxTS.
Using Lemma 1, there exists a constant such that can converge to the following region within a fixed time:
and the convergence time satisfies the following conditions:
Step 2: Stability analysis in the sliding phase: When , (22) can be rewritten as
Consider the Lyapunov function:
Taking the derivative of yields
with
which implies that the system is fixed-time stable, and the settling time is estimated as
Consequently, the fixed-time convergence of the error state transformation is guaranteed to reach the origin for all .
Therefore, we can conclude that all the states (i.e., , , , and ) of the closed-loop system are practically stability in fixed-time. In addition, according to the definition (22) and Lemma 1, the error state transformation is also fixed-time stable, which means that the tracking error can converge to a region nearby zero within the settling time, i.e., the fixed-time individual vehicle stability. □
Theorem 2.
The fixed-time string stability (21) of the vehicular platoon system in Theorem 1 can be guaranteed under the developed control law in (32) for all .
Proof.
The proof is similar to Theorem 1 in [27], such that fixed-time string stability can be guaranteed when . □
Remark 2.
Compared with [9,14], the proposed Nussbaum function method in this paper not only removes the adverse effects of unknown time-varying faults directions, but also improves the system performance by selecting an appropriate constant λ. In addition, the proposed control algorithm guarantees the fixed-time stability of the platoon system rather than the asymptotic stability in [9,14].
5. Simulation Studies
In the simulation, a platoon with five vehicles is considered, and the parameters of each vehicle are given in Table 2. The desired distance between two adjacent vehicles is , the minimum safety distance is , the maximum effective communication distance is , the bias constraint function is , and the prescribed constraint function is = 4.5. The specific trajectories of the virtual leader are given in Figure 2 with , and the initial positions and velocities of the vehicles in the platoon are chosen as follows: , and with zero initial tracking errors. The external disturbances are , and the controller parameters are listed in Table 3.
Table 2.
Model Parameters for Each Vehicle.
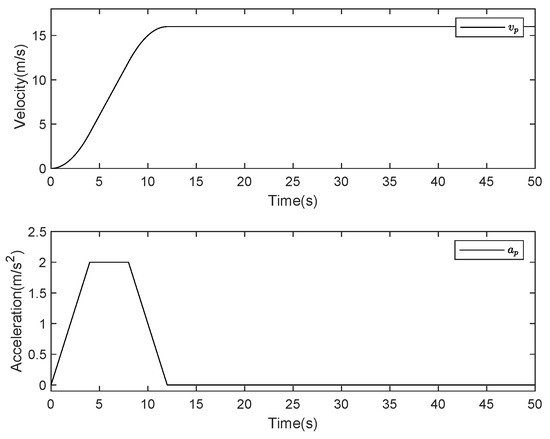
Figure 2.
Profile of the platoon velocity and acceleration.
Table 3.
Control Parameters of Each Vehicle.
5.1. The Results of the Proposed Control Scheme without Actuator Faults
In this section, actuator faults are not considered, so the fault efficiency factor and the bias fault are given as: , , and .
Figure 3 shows the simulation results, which illustrate that better control performance can be obtained under the proposed control scheme (i.e., Theorem 1 and 2) in this paper. Figure 3a–c show the position, velocity and acceleration of each vehicle, from which it is obvious that all the followers can follow the speed and acceleration of the virtual leader, while ensuring that the distance constraint is not violated. Figure 3d and Figure 3e describe the control input of the vehicles and sliding mode surfaces, respectively. From Figure 3f, it can be seen that the tracking error converges to a small region near zero in a fixed time under the effect of the proposed method, that is, individual vehicle stability is ensured. In addition, string stability can also be guaranteed, i.e., . In conclusion, the given scheme is effective for the platoon system under distance constraints without actuator faults.
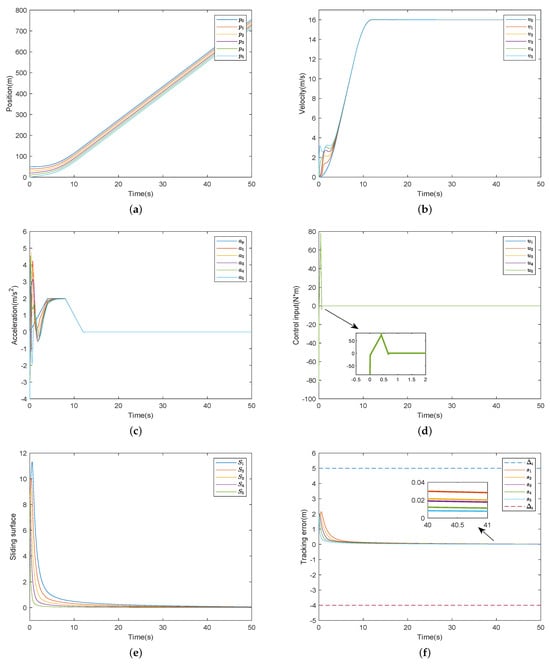
Figure 3.
Simulation results without faults. (a) Position. (b) Velocity. (c) Acceleration. (d) Control input. (e) Sliding surface. (f) Tracking error.
5.2. The Effect of Unknown Actuator Fault Directions
Case 1: (With the Nussbaum function). To account for actuator faults with unknown directions, we randomly set the fault efficiency factor and bias fault to make the system more aligned with reality:
The results of Case 1 are shown in Figure 4. It is obvious that the platoon control is also achieved under the given control scheme. Note that when the direction of the fault is unknown, the impact of a reverse fault on the vehicle is more pronounced. As shown in Figure 4f, the tracking errors appear as reverse faults around , the acceleration curves in Figure 4c, the control input in Figure 4d, and the sliding surface in Figure 4e also have peaks but quickly converge to near zero, and ensure system stability, string stability and collision avoidance, which show the effectiveness of the method proposed in Theorems 1 and 2.
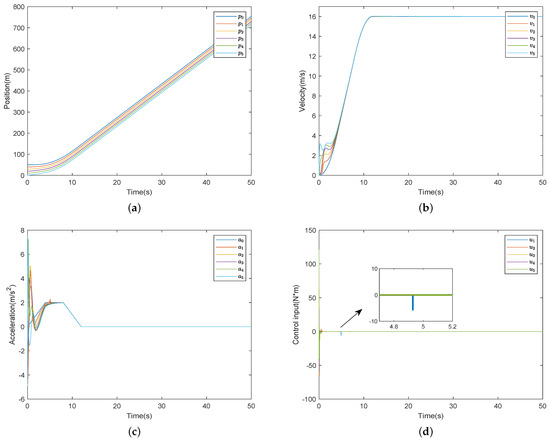
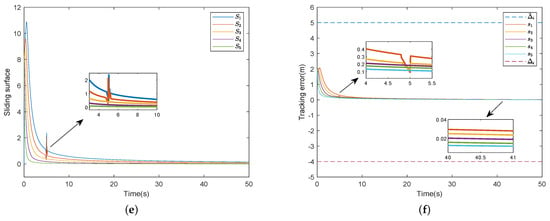
Figure 4.
Simulation results in Case 1. (a) Position. (b) Velocity. (c) Acceleration. (d) Control input. (e) Sliding surface. (f) Tracking error.
Case 2: (Without the Nussbaum function). In this part, to further illustrate the effectiveness of the given method, a control scheme without the Nussbaum function is considered. The simulation result is shown in Figure 5. It shows the tracking error curve for the control scheme that does not handle actuator faults with unknown directions. The tracking error is within the set constraints, but the curve keeps oscillating and the system becomes unstable. These all illustrate the necessity and advantages of the control scheme proposed in this paper.
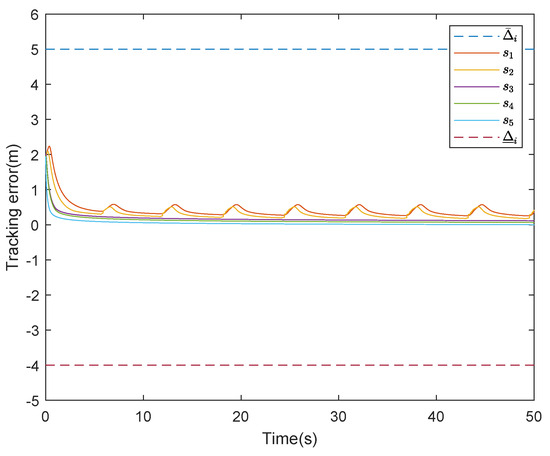
Figure 5.
The tracking error without the Nussbaum function.
In summary, the effectiveness of the proposed control scheme is well demonstrated, i.e., individual vehicle stability and string stability can be guaranteed in the conditions of time-varying actuator faults, uncertain parameters and unknown disturbances.
6. Conclusions
In this paper, fault-tolerant control of vehicle platoons with time-varying actuator fault directions and distance constraints is investigated. A novel Nussbaum function is introduced to handle unknown time-varying actuator fault directions. By incorporating a bias constraint function to modify the distance constraints, a new BLF mechanism is proposed, with which symmetric and asymmetric distance constraints can all be dealt with under the same framework. Further, a fixed-time fault-tolerant vehicle platoon control scheme is given, capable of guaranteeing individual vehicle stability and string stability within a fixed time.
Author Contributions
Conceptualization, W.L. and Z.G.; methodology, W.L., Z.W. and Z.G.; software, Y.L.; validation, W.L., Y.L. and Z.W.; formal analysis, Y.L. and Z.W.; investigation, W.L. and Z.W.; resources, Z.W.; data curation, Y.L.; writing—original draft preparation, W.L.; writing—review and editing, Z.W., Y.L. and Z.G.; visualization, Y.L.; supervision, Z.G.; project administration, Z.G.; funding acquisition, Z.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (62303101) and the Natural Science Foundation of Hebei Province (F2023501001).
Data Availability Statement
No new data were created or analyzed in this study.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Chu, S.; Majumdar, A. Opportunities and challenges for a sustainable energy future. Nature 2012, 488, 294–303. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Li, S.E.; Li, K.; Wang, L. Stability margin improvement of vehicular platoon considering undirected topology and asymmetric control. IEEE Trans. Control Syst. Technol. 2016, 24, 1253–1265. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.-L.; Wang, J.; Zhang, X.M. A scalable adaptive approach to multi-vehicle formation control with obstacle avoidance. IEEE/CAA J. Autom. Sin. 2022, 9, 990–1004. [Google Scholar] [CrossRef]
- Rödönyi, G. An adaptive spacing policy guaranteeing string stability in multi-brand ad hoc platoons. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1902–1912. [Google Scholar] [CrossRef]
- Wang, J.; Luo, X.; Wong, C.; Guan, X. Specified-time vehicular platoon control with flexible safe distance constraint. IEEE Trans. Veh. Technol. 2019, 68, 10489–10503. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhu, F.; Xu, D.; Guo, S.; Dai, Y. Event-triggered multi-lane fusion control for 2-D vehicle platoon systems with distance constraints. IEEE Trans. Intell. Veh. 2023, 8, 1498–1511. [Google Scholar] [CrossRef]
- Guo, G.; Li, D. Adaptive sliding mode control of vehicular platoons with prescribed tracking performance. IEEE Trans. Veh. Technol. 2019, 68, 7511–7520. [Google Scholar] [CrossRef]
- Guo, X.; Wang, J.; Liao, F.; Teo, R.S.H. Distributed adaptive integrated-sliding-mode controller synthesis for string stability of vehicle platoons. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2419–2429. [Google Scholar] [CrossRef]
- Guo, X.G.; Xu, W.D.; Wang, J.L.; Park, J.H.; Yan, H. BLF-based neuroadaptive fault-tolerant control for nonlinear vehicular platoon with time-varying fault directions and distance restrictions. IEEE Trans. Intell. Transp. Syst. 2022, 23, 12388–12398. [Google Scholar] [CrossRef]
- Aaron, D.; Xu, X.; Grizzle, W.; Tabuada, P. Control barrier function based quadratic programs for safety critical systems. IEEE Trans. Autom. Control 2017, 62, 3861–3876. [Google Scholar]
- Wu, Z.; Albalawi, F.; Zhang, Z.; Zhang, J.; Durand, H.; Panagiotis, D. Control Lyapunov-barrier function-based model predictive control of nonlinear systems. Automatica 2019, 109, 108508. [Google Scholar] [CrossRef]
- Wei, H.; Liu, J.; Chen, H.; Liu, L. Fuzzy adaptive control for vehicular platoons with constraints and unknown dead-zone input. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4403–4412. [Google Scholar] [CrossRef]
- Lei, Y.; Li, X.; Tong, C. Distributed adaptive asymptotic tracking of 2-D vehicular platoon systems with actuator faults and spacing constraints. IEEE/CAA J. Autom. Sin. 2023, 10, 1352–1354. [Google Scholar] [CrossRef]
- Guo, X.G.; Xu, W.D.; Wang, J.L.; Park, J.H. Distributed neuroadaptive fault-tolerant sliding-mode control for 2-D plane vehicular platoon systems with spacing constraints and unknown direction faults. Automatica 2021, 129, 109–675. [Google Scholar] [CrossRef]
- Li, L.; Luo, H.; Ding, X.; Yang, Y.; Peng, X. Performance-based fault detection and fault-tolerant control for automatic control systems. Automatica 2019, 99, 308–316. [Google Scholar] [CrossRef]
- Xiao, Y.; Dong, X. Distributed fault-tolerant containment control for nonlinear multi-agent systems under directed network topology via hierarchical approach. IEEE/CAA J. Autom. Sin. 2021, 8, 806–816. [Google Scholar] [CrossRef]
- Pan, C.; Chen, Y.; Liu, Y.; Ali, I. Adaptive resilient control for interconnected vehicular platoon with fault and saturation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 10210–10222. [Google Scholar] [CrossRef]
- Guo, G.; Li, P.; Hao, L.Y. A new quadratic spacing policy and adaptive fault-tolerant platooning with actuator saturation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 1200–1212. [Google Scholar] [CrossRef]
- Gao, Z.Y.; Zhang, Y.; Guo, G. Finite-time fault-tolerant prescribed performance control of connected vehicles with actuator saturation. IEEE Trans. Veh. Technol. 2023, 72, 1438–1448. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, F.; Liu, Z.; Zhang, Y.; Chen, C.L.P. Fixed-time fuzzy control for a class of nonlinear systems. IEEE Trans. Cybern. 2022, 52, 3880–3887. [Google Scholar] [CrossRef]
- Yang, H.; Ye, D. Adaptive fixed-time bipartite tracking consensus control for unknown nonlinear multi-agent systems: An information classification mechanism. Inf. Sci. 2018, 459, 238–254. [Google Scholar] [CrossRef]
- Zuo, Z. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica 2015, 54, 305–309. [Google Scholar] [CrossRef]
- Ren, B.; Ge, S.S.; Tee, K.P.; Lee, T.H. Adaptive neural control for output feedback nonlinear systems using a barrier Lyapunov function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar] [PubMed]
- Shahvali, M.; Shojaei, K. Distributed adaptive neural control of nonlinear multi-agent systems with unknown control directions. Nonlinear Dyn. 2016, 83, 2213–2228. [Google Scholar] [CrossRef]
- Li, D.; Guo, G. Prescribed performance concurrent control of connected vehicles with nonlinear third-order dynamics. IEEE Trans. Veh. Technol. 2020, 69, 14793–14802. [Google Scholar] [CrossRef]
- Kwon, J.W.; Chwa, D. Adaptive bidirectional platoon control using a coupled sliding mode control method. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2040–2048. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, Y.; Guo, G. Adaptive fixed-time prescribed performance control of vehicular platoons with unknown dead-zone and actuator saturation. Int. J. Robust Nonlinear Control 2023, 33, 1231–1253. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).