

A Method with Double Inertial Type and Golden Rule Line Search for Solving Variational Inequalities

 and
and
Abstract
1. Introduction
2. Preliminaries
- (a)
- L-Lipschitz continuous with if
- (b)
- monotone if
- (c)
- pseudomonotone if
- (i)
- ,
- (ii)
- (iii)
3. Main Result
- (L1)
- H is a Hilbert space and C is a nonempty, closed and convex subset of H.
- (L2)
- is pseudomonotone and uniformly continuous on H.
- (L3)
- G is weakly sequentially continuous, that is for any , we have implies .
| Algorithm 1: Double inertial PCM-type method for solving pseudomonotone VIP |
Initialization: Given , , , , . Let be given starting points. Set . Iterative Steps:
Calculate as follows:
|
- (a)
- (b)
- An alternate strategy for solving variational inequalities is provided by the modified projection and contraction method with the new line-search rule (11). This algorithm uses the golden ratio to efficiently estimate the step size, in contrast to earlier methods (see [34,35,36]), which employed a different line-search method. Its efficacy is shown by numerical experiments, which makes it a promising substitute for solving variational inequalities with non-Lipschitz mappings in real Hilbert spaces.
- (c)
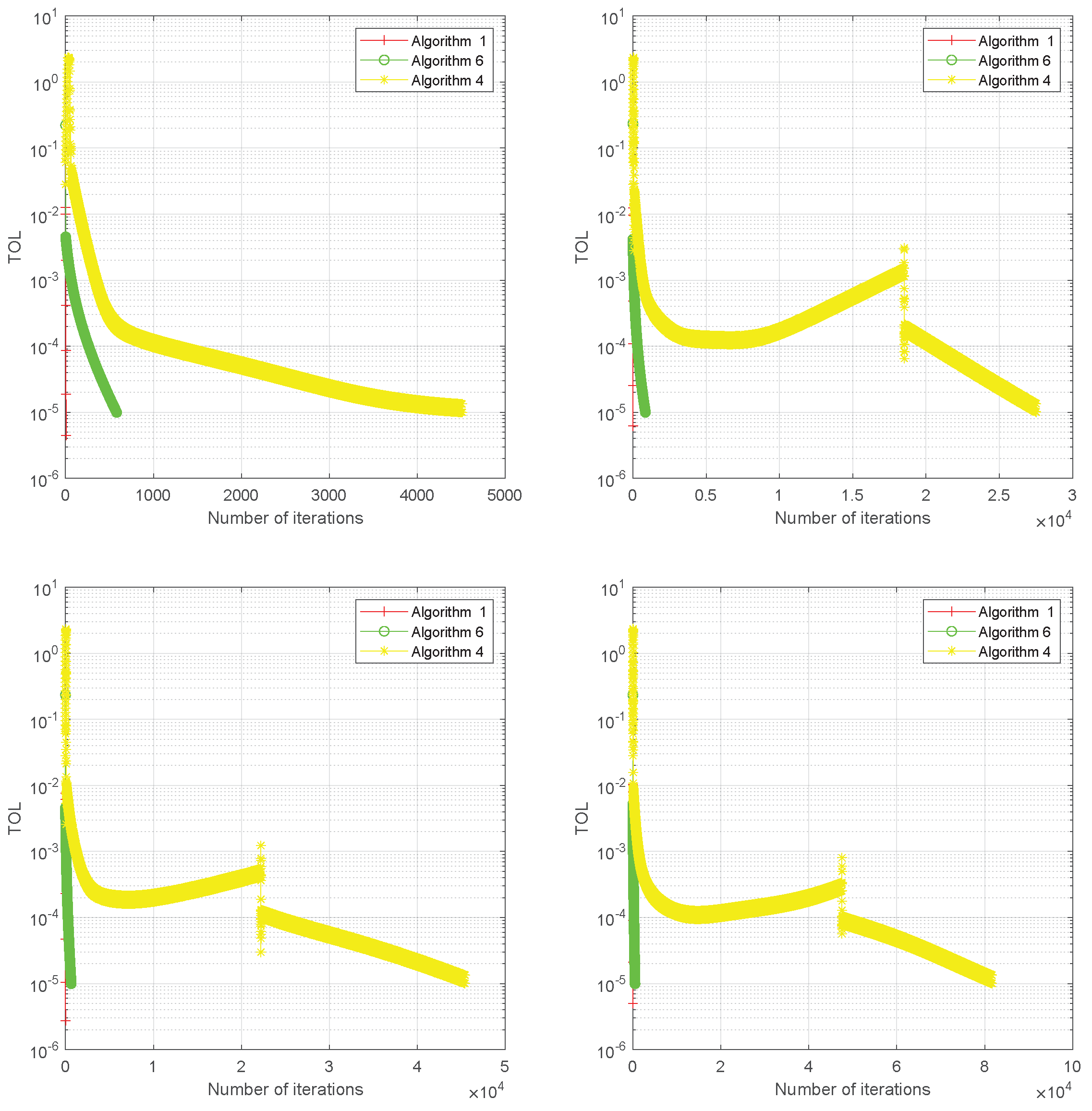
4. Numerical Example
- Case 1:
- and .
- Case 2:
- and .
- Case 3:
- and .
- Case 4:
- and .
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brnabic, A.; Hess, L.M. Systematic literature review of machine learning methods used in the analysis of real-world data for patient-provider decision making. BMC Med. Inform. Decis. Mak. 2021, 21, 54. [Google Scholar] [CrossRef] [PubMed]
- Salazar-Reyna, R.; Gonzalez-Aleu, F.; Granda-Gutierrez, E.M.; Diaz-Ramirez, J.; Garza-Reyes, J.A.; Kumar, A. A systematic literature review of data science, data analytics and machine learning applied to healthcare engineering systems. Manag. Decis. 2022, 60, 300–319. [Google Scholar] [CrossRef]
- Abass, H.A.; Ugwunnadi, G.C.; Narain, O.K.; Darvish, V. Inertial extrapolation method for solving variational inequality and fixed point problems of a Bregman demigeneralized mapping in a reflexive Banach space. Numer. Funct. Anal. Optim. 2022, 43, 933–960. [Google Scholar] [CrossRef]
- Alansari, M.; Ali, R.; Farid, M. Strong convergence of an inertial iterative algorithm for variational inequality problem, generalized equilibrium problem and fixed point problem in a Banach space. J. Inequal. Appl. 2020, 2020, 42. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. Algorithms for the split variational inequality problem. Numer. Algor. 2012, 59, 301–323. [Google Scholar] [CrossRef]
- Ali, B.; Ugwunnadi, G.C.; Lawan, M.S.; Khan, A.R. Modified inertial subgradient extragradient method in reflexive Banach spaces. Bol. Soc. Mat. Mex. 2021, 27, 30. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. The subgradient extragradient method for solving variational inequalities in Hilbert space. J. Optim. Theory Appl. 2011, 148, 318–335. [Google Scholar] [CrossRef]
- Cholamjiak, P.; Shehu, Y. Inertial forward-backward splitting method in Banach spaces with application to compressed sensing. Appl. Math. 2019, 64, 409–435. [Google Scholar] [CrossRef]
- Shehu, Y.; Vuong, P.T.; Cholamjiak, P. A self-adaptive projection method with an inertial technique for split feasibility problems in Banach spaces with applications to image restoration problems. J. Fixed Point Theory Appl. 2019, 21, 50. [Google Scholar] [CrossRef]
- Suantai, S.; Cho, Y.J.; Cholamjiak, P. Halpern’s iteration for Bregman strongly nonexpansive mappings in reflexive Banach spaces. Comput. Math. Appl. 2012, 64, 489–499. [Google Scholar] [CrossRef]
- Suantai, S.; Pholasa, N.; Cholamjiak, P. The modified inertial relaxed CQ algorithm for solving the split feasibility problems. J. Ind. Manag. Optim. 2018, 14, 1595–1615. [Google Scholar] [CrossRef]
- Korpelevich, G.M. The extragradient method for finding saddle points and other problems. Ekonom. Mate. Metod. 1976, 12, 747–756. [Google Scholar]
- Antipin, A.S. On a method for convex programs using a symmetrical modification of Lagrange function. Ekonom. I Mate. Metod. 1976, 12, 1164–1173. [Google Scholar]
- He, B.S. A class of projection and contraction methods for monotone variational inequalities. Appl. Math. Optim. 1997, 35, 69–76. [Google Scholar] [CrossRef]
- Dong, Q.L.; Cho, Y.J.; Rassias, T.M. The projection and contraction methods for finding common solutions to variational inequality problems. Optim. Lett. 2018, 12, 1871–1896. [Google Scholar] [CrossRef]
- Dong, Q.L.; Jiang, D.; Gibal, A. A modified subgradient extragradient method for solving the variational inequality problem. Numer. Algor. 2018, 9, 927–940. [Google Scholar] [CrossRef]
- Dong, Q.L.; Cho, Y.J.; Zhong, L.L.; Rassias, T.M. Inertial projection and contraction algorithms for variational inequalities. J. Glob. Optim. 2018, 70, 687–704. [Google Scholar] [CrossRef]
- Tian, M.; Xu, G. Improved inertial projection and contraction method for solving pseudomonotone variational inequality problems. J. Inequal. Appl. 2021, 2021, 107. [Google Scholar] [CrossRef]
- Alvarez, F.; Attouch, H. An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping. Set-Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Cioranescu, I. Geometry of Banach Spaces, Duality Mappings and Nonlineqar Problems; Kluwer Academic: Dordrecht, The Netherlands, 1990. [Google Scholar]
- Maluleka, R.; Ugwunnadi, G.C.; Aphane, M. Inertial subgradient extragradient with projection method for solving variational inequality and fixed point problems. AIMS Math. 2023, 8, 30102–30119. [Google Scholar] [CrossRef]
- Li, X.-H. A strong convergence theorem for solving variational inequality problems with pseudo-monotone and Lipschitz mappings. J. Nonlinear Funct. Anal. 2022, 2022, 4. [Google Scholar]
- Liu, L. A stochastic projection and contraction algorithm with inertial effects for stochastic variational inequalities. J. Nonlinear Var. Anal. 2023, 7, 995–1016. [Google Scholar]
- Thong, D.V.; Vuong, P.T. Modified Tseng’s extragradient methods for solving pseudo-monotone variational inequalities. Optimization 2019, 68, 2207–2226. [Google Scholar] [CrossRef]
- Yao, Y.; Iyiola, O.S.; Shehu, Y. Subgradient Extragradient Method with Double Inertial Steps for Variational Inequalities. J. Sci. Comput. 2022, 90, 71. [Google Scholar] [CrossRef]
- Li, H.Y.; Wang, X.F. Subgradient extragradient method with double inertial steps for quasi-monotone variational inequalities. Filomat 2023, 37, 9823–9844. [Google Scholar] [CrossRef]
- Li, H.Y.; Wang, X.F.; Wang, F.H. Projection and contraction method with double inertial steps for quasi-monotone variational inequalities. Optimization 2024, 1–31. [Google Scholar] [CrossRef]
- Ofem, A.E.; Mebawondu, A.A.; Ugwunnadi, G.C.; Cholamjiak, P.; Narain, O.K. Relaxed Tseng splitting method with double inertial steps for solving monotone inclusions and fixed point problems. Numer. Algor. 2024, 96, 1465–1498. [Google Scholar] [CrossRef]
- Thong, D.V.; Li, X.H.; Dung, V.T.; Huyen, P.T.; Tam, H.T. Using Double Inertial Steps Into the Single Projection Method with Non-monotonic Step Sizes for Solving Pseudomontone Variational Inequalities. Netw. Spat. Econ. 2024, 24, 1–26. [Google Scholar] [CrossRef]
- Wang, K.; Wang, Y.H.; Iyiola, O.S.; Shehu, Y. Double inertial projection method for variational inequalities with quasi-monotonicity. Optimization 2024, 73, 707–739. [Google Scholar] [CrossRef]
- Chidume, C.E. Geometric properties of Banach spaces and nonlinear iterations. In Springer Verlag Series; Lecture Notes in Mathematics; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 978-1-84882-189-7. [Google Scholar]
- Saejung, S.; Yotkaew, P. Approximation of zeroes of inverse strongly monotone operators in Banach spaces. Nonlinear Anal. 2012, 75, 742–750. [Google Scholar] [CrossRef]
- Tan, B.; Qin, X. Modified inertial projection and contraction algorithms for solving variational inequality problems with non-Lipschitz continuous operators. Anal. Mathl. Phys. 2022, 12, 26. [Google Scholar]
- Iusem, A.N. An iterative algorithm for the variational inequality problem. Comput. Appl. Math. 1994, 13, 103–114. [Google Scholar]
- Khobotov, E.N. Modifications of the extragradient method for solving variational inequalities and certain optimization problems. USSR Comput. Math. Math. Phys. 1987, 27, 120–127. [Google Scholar] [CrossRef]
- Marcotte, P. Application of Khobotov’s algorithm to variational inequalities and network equilibrium problems. Inf. Syst. Oper. Res. 1991, 29, 258–270. [Google Scholar] [CrossRef]
- Long, X.J.; Yang, J.; Cho, Y.J. Modified Subgradient Extragradient Algorithms with A New Line-Search Rule for Variational Inequalities. Bull. Malays. Math. Sci. Soc. 2023, 46, 140. [Google Scholar] [CrossRef]
- Thong, D.V.; Shehu, Y.; Iyiola, O.S. Weak and strong convergence theorems for solving pseudo-monotone variational inequalities with non-Lipschitz mappings. Numer. Algor. 2019, 84, 795–823. [Google Scholar] [CrossRef]
- He, H.; Ling, C.; Xu, H.K. A relaxed projection method for split variational inequalities. J. Optim. Theory Appl. 2015, 166, 213–233. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ezeafulukwe, U.A.; Akuchu, B.G.; Ugwunnadi, G.C.; Aphane, M. A Method with Double Inertial Type and Golden Rule Line Search for Solving Variational Inequalities. Mathematics 2024, 12, 2203. https://doi.org/10.3390/math12142203
Ezeafulukwe UA, Akuchu BG, Ugwunnadi GC, Aphane M. A Method with Double Inertial Type and Golden Rule Line Search for Solving Variational Inequalities. Mathematics. 2024; 12(14):2203. https://doi.org/10.3390/math12142203
Chicago/Turabian StyleEzeafulukwe, Uzoamaka Azuka, Besheng George Akuchu, Godwin Chidi Ugwunnadi, and Maggie Aphane. 2024. "A Method with Double Inertial Type and Golden Rule Line Search for Solving Variational Inequalities" Mathematics 12, no. 14: 2203. https://doi.org/10.3390/math12142203
APA StyleEzeafulukwe, U. A., Akuchu, B. G., Ugwunnadi, G. C., & Aphane, M. (2024). A Method with Double Inertial Type and Golden Rule Line Search for Solving Variational Inequalities. Mathematics, 12(14), 2203. https://doi.org/10.3390/math12142203