Abstract
The -value or structured singular value is a prominent mathematical tool to analyze and synthesize both the robustness and performance of time-invariant systems. We establish and analyze new results concerning structured singular values for the Hadamard product of real square M-matrices. The new results are obtained for structured singular values while considering a set of block diagonal uncertainties. The targeted uncertainties are of two types, that is, pure real scalar block uncertainties and real full-block uncertainties. The eigenvalue perturbation result is utilized in order to determine the behavior of the spectrum of perturbed matrices and .
Keywords:
M-matrices; Hadamard product of matrices; dynamical system; perturbed eigenvalues; singular values; structured singular values MSC:
15A03; 15A18; 80M50
1. Introduction
The -value or structured singular value is a notable and prominent mathematical tool for analyzing both the robustness and performance of time-invariant dynamical systems appearing in control [1]. The notion of -value or structured singular value was first introduced and popularized by Doyle in his famous article [2]. The structured singular value quantifies the stability of time-invariant dynamical systems depending upon the structured and unstructured uncertainties, such as mixed real and complex, pure real, pure complex and a mixture of full real/complex and full real or full complex uncertainties. For practical usage of a structured singular value, we refer to [3,4,5,6,7,8,9,10,11,12] and references therein.
The computation of the definite value of an -value or structured singular value is very hard, in fact, NP-hard [4], and this allows the development of suitable and efficient numerical techniques for its approximation. The main objective of such numerical techniques is to approximate the computation of the -value or structured singular value from below or above more accurately and efficiently. The numerical approximation of a -value or structured singular value from below and above provides the most suitable and reliable conditions to guarantee stability and instability of time-invariant dynamical systems, respectively.
The numerical approximation of tightly structured singular values from below for the case of real uncorrelated parametric uncertainties was carried out by a numerical algorithm presented in [13], which is based on top of the simple matrix algebra operations. This new algorithm is much simpler than the already existing algorithm [14,15,16,17,18]. A non-linear programming methodology is introduced in [19] to determine the tight lower bounds when real structured uncertainties are present, and the obtained results are better than toolbox and GAMS optimization solvers.
A low-rank ODE-based numerical technique is presented in [20] to approximate the -value or structured singular values from below for LTV dynamical systems, and the obtained results match with those obtained with the MATLAB function mussv. The stability analysis of LTI dynamical systems while considering diagonal norm-bounded linear differential inclusions is studied by approximating the bounds of structured singular values [21].
In [22], it has been shown that five full block -values or structured singular values subject to real uncertainties are exactly equal to the computation of their upper bounds. The results are obtained by formulating the equality conditions and equality constraints as a feasibility semi-definite programming problem and invoking results on the existence of a low-rank solution. In [23], authors have given new results concerning the exact computation of the upper bounds of -values or structured singular values and skewed structured singular values. These results were obtained along with their dual characterizations and presented and analyzed while defining characterization in the sense that it acts as an application to the duality argument in the context of convex sets. A Newton-type method is developed in [24] to approximate the upper bounds of the largest structured singular value for a class of general mixed real and complex perturbations.
In [25], the asymptotic behavior of solution trajectories corresponding to dynamical systems is stated uniformly while introducing some new notions—”asymptotic equivalence” and ”asymptotic reduction of solution space dimension”. Furthermore, a new method to split the spaces provides an extension of the phenomenon of special solutions onto large classes of operator difference equations and provides new results for delay differential equations.
The maximal regularity properties of abstract differential operator equations corresponding to weighted spaces are studied in [26]. The idea of Fourier multiplier theorems for obtaining the coercive properties of convolution differential-operator equations (CDOEs) is applied while considering the unbounded operator coefficient in weight spaces.
A variable step size strategy to formulate a new step hybrid block method (VSHBM) to solve the rigid and stiff differential equations is presented in [27]. The proposed methodology is formulated by integrating the Lagrange polynomial with a limit of integration taken at some special points. The graphical illustration for the stability regions indicated that the method is suitable for dealing with dynamical systems involving rigid and stiff differential equations.
An ordinary differential-equations-based technique is developed in [28] to analyze the quadratic stability of non-linear dynamical systems. The norm-bounded linear differential inclusions are used to model the non-linear dynamical systems. Furthermore, the existence of a symmetric positive definite matrix to study the stability of non-linear dynamical systems is demonstrated by means of the Lyapunov function.
A new controller for UPQC in order to perform the power quality conditioning in microgrid is presented in [29]. This new controller improves the stability and performance towards the power quality problems.
A reduced order model is utilized to deal with the problem involving the designing of interval observer for the system described by a linear discrete-time model subject to some external disturbances and the measurement noises, for more details we refer [30].
In [31], an uncertainty and disturbance estimator UDE-based control is employed in order to ensure the finite-time tracking and disturbance rejection performance for a class of Takagi-Sugero fuzzy switched systems involving the unknown time-varying uncertainties.
Motivated by the above results, in this article, we present the computation of structured singular values for the Hadamard product of the given matrices A and B. The structure of is taken such that and and for and . The set of block diagonal-structured uncertainties is of two types, that is,
1. The set of block diagonal uncertainties contains only pure real full-blocks, that is,
2. The set of real/complex scalar blocks uncertainties contains blocks that are real/complex scalar multiple of an identity matrix, that is,
The novelty of this paper is providing algorithms for the computation of structured singular values and admissible perturbations for M-matrices . The proposed algorithms allow us to check the behavior of the spectrum of perturbed matrices and . To the best of our observation, no result exists in the literature in this regard.
Overview of article. Section 2 of the article provides definitions of -values or structured singular values for pure real repeated scalar blocks and a number of real full blocks. Furthermore, the definitions of real/complex scalar block uncertainties and real full block uncertainties and four fundamental properties of -values or structured singular values are presented.
In Section 3, we give definitions of the spectral radius of a given matrix. Furthermore, the definition and results on the spectrum of M-matrices are presented.
In Section 4, we present some new results on -values or structured singular values for the Hadamard product of real squared M-matrices. The new results are presented with suitable examples with numerical tests.
Applications of structured singular values to discuss the stability of dynamical systems containing M-matrices are presented in Section 5. Furthermore, we provide Algorithm 1 for the computation of an admissible perturbation level to determine the lower bounds of structured singular values.
| Algorithm 1: Approximate the perturbation level to approximate structured singular values |
procedure Given(A(M-matrix), BLK, , (given lower bound), (given lower bound) , (given upper bound), (starting number of eigenvalues)) for i ← 1 solve the system of ODEs (4.10) in [20] corresponding to each case start from initial choice . Let be a stationary solution and be the smallest eigenvalue corresponding to perturbed matrix Set Set , , , the eigenvectors Compute by one step Newton Iteration Set While solve ODEs (4.10) in [20] with starting from Let be a stationary solution of (4.10) in [20]. Let be smallest eigenvalue of perturbed matrix if then Set Compute with one step Newton Iteration. end procedure |
2. Structured Singular Values
This section of our article is devoted to defining the structured singular value, which in fact is a map and is defined below:
Definition 1.
For any , the structured singular value is defined
The set denotes the set of uncertainties, that is, a set of block diagonal matrices. Furthermore, we use the convention that the minimum over an empty set is The is a positively homogeneous function, that is,
Definition 2.
The set of pure real full blocks is defined
Definition 3.
The set of real scalar blocks is defined
We give some basic but important properties of an -value or structured singular values deducted from the definition of an -value or structured singular value. For given with , and and and . Let and be the set of block diagonal uncertainties, then
Property 1.
for and . Furthermore, it holds true that for and .
Property 2.
, for . Here, represent the maximum singular value of . Furthermore, .
Property 3.
, for and denotes the spectral radius of . Furthermore, .
Property 4.
For and let . Then, for , we have
Furthermore,
3. M-Matrices
The concept of M-matrices was introduced by Ostrowski in 1937. These matrices appear in a variety of scientific areas such as finite difference methods for partial differential equations, Markov chains in stochastic processes etc. M-matrices are helpful for establishing the bounds of the spectrum of given matrices [32]. Furthermore, such a class of matrices is helpful in providing convergence criteria for numerical algorithms to approximate the suitable and more accurate solution for large-scale sparse systems of linear equations.
Definition 4.
A real-valued square matrix can be expressed as where and , then A is called an M-matrix.
Definition 5.
For a given matrix with eigenvalues of X and is called spectral radius.
Theorem 1.
A non-singular matrix with is an M-matrix if and only if .
Theorem 2.
Let be a real-value-squared M-matrix, that is, with and . Then
with , the spectrum.
and .
4. Main Results
Lemma 1.
([11]). Let be a smooth matrix family and let be a continuous branch of eigenvalues of corresponding to a simple eigenvalue of as . Then is analytic near with
where and , are the right and left eigenvectors of corresponding to that is, and .
Theorem 3.
([33]). Any matrix can be factorized as the product of an orthogonal matrix U, a diagonal matrix Σ and an orthogonal matrix V such that
Theorem 4.
Let
and assume that has a simple and maximum eigenvalue in terms of its absolute value, that is, , . Let . Assume that . Then, , .
Proof.
For
it is not possible to have the negative singular values, that is, . Let with , . This can be seen by making use of a singular value decomposition algorithm on , which yields , where T represents the transpose. Hence , a diagonal matrix is obtained as follows, that is,
where , the singular values. By making use eigenvalue perturbation results [11], we obtain
Since, , and .
Therefore, , where . Since , which is true and in turn implies that
which leads clearly to a contradiction to the fact that cannot exceed 1 . As , and from above, it is evident that , which is impossible. Finally, we have that for each , . □
Example 1.
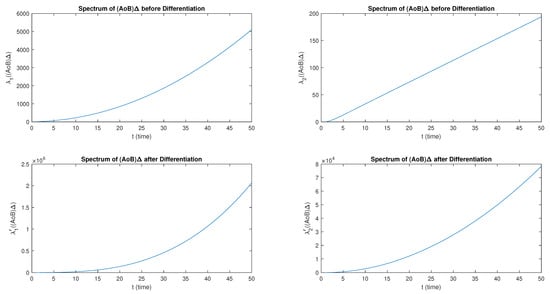
Let and are M-matrices and let , be the admissible perturbation. The spectrum of the perturbed matrix is obtained as non-negative, as shown in Figure 1. Furthermore, it can be seen that and have a smooth growth as . The spectrum of after differentiation is also positive and has a smooth growth as . Furthermore, and satisfies the condition that for all .
Figure 1.
Spectrum of before and after differentiation.
Theorem 5.
Let the set of block diagonal uncertainties contain only pure repeated real scalar blocks, that is,
where , .
Assume that has simple and maximum eigenvalues in terms of absolute value, that is, , . Let and . Furthermore, assume that . Then, .
Proof.
Since can have negative eigenvalues depending on , our aim is to transform all the negative eigenvalues such that , . Secondly, we restrict , because of the extremality condition of . In this direction, we aim to construct an admissible perturbation matrix (say) , , and then we determine the direction , where dot operator stands for the differentiation. The computation of the derivative of shows how fast the negative eigenvalues move so that , . For this purpose, we make use of the following eigenvalue problem of the form
where is a small parameter to adjust the perturbation, and is the perturbation matrix. In Equation (1), is an eigenvector corresponding to eigenvalue . Furthermore, we assume that , . Upon differentiation with respect to t, Equation (1) takes the form,
Equation (2) can also be written as
Take in Equation (3) and , which results into the following mathematical optimization problem of the form
The solution of the above optimization problem yields that , . This is against the extremality condition of , and hence, , , . □
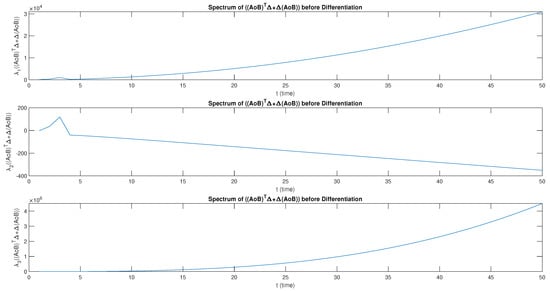
Example 2.
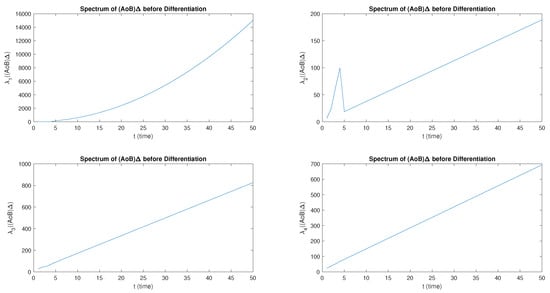
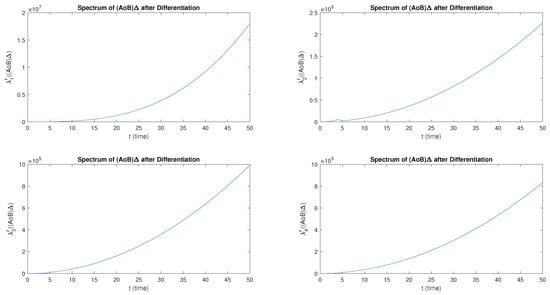
Let and be M-matrices. Consider , as the set of block-diagonal matrices. The eigenvalue before and after differentiation has a smooth growth as t increases. The eigenvalue before differentiation is obtained as positive but for it first grows rapidly and then decays. Furthermore, has a linear growth for . However, after the differential has a non-linear growth and , first grows monotonically with a small magnitude, then there is a sharp decay. The eigenvalues of and have a positive linear growth before differentiation but a smooth non-linear growth after differentiation, as shown in Figure 2. Furthermore, both and satisfy , . The behavior of the spectrum of after differentiation is shown in Figure 3.
Figure 2.
Spectrum of before differentiation.
Figure 3.
Spectrum of after differentiation.
Theorem 6.
Let with , and , and let with , and , be real and squared valued matrices. Let be the Hadamard product, and then there exists with such that is a positive definite matrix, that is,
Proof.
Assume that has a block diagonal structure, that is,
and further assume that is the simple eigenvalue of , and let , and , where x and y are partitioned according to the structure of and act as left and right eigenvectors, respectively. By making use of the eigenvalue perturbation result, we obtain the following result for the behavior of the maximum eigenvalue,
with , .
In Equation (5), are positive parameters, and furthermore, and possess a unit 2-norm, that is, . Since with for and for and with for and for , in turn, this implies that has positive eigenvalues, that is,
□
Example 3.
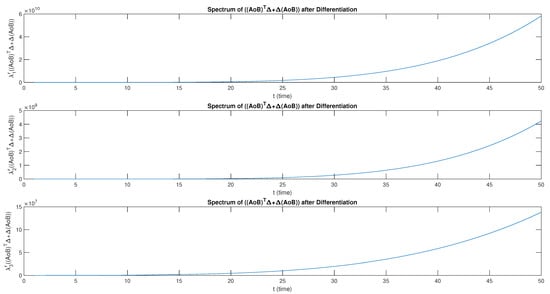
Let and be M-matrices, and let , be an admissible perturbation.
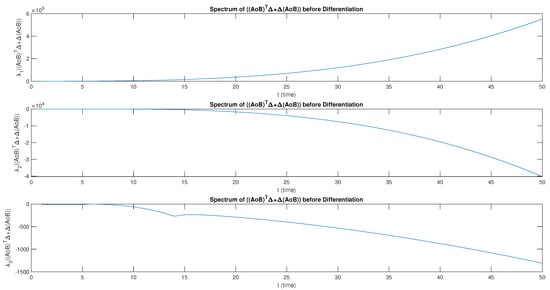
The eigenvalue before and after differentiation has a smooth non-linear growth for , as shown in Figure 4. The eigenvalues and infinitely appear to be almost zero but then become negative as t increases. Both and have a decreasing monotonic behavior before differentiation. However, after the differentiation, and become strictly positive and possess monotonically increasing behavior, as shown in Figure 5.
Figure 4.
Spectrum of before differentiation.
Figure 5.
Spectrum of after differentiation.
Theorem 7.
Let with , and , and with , and , . Let be the Hadamard product of A and B. Then there exists a block diagonal structured matrix Δ with structure
where are real numbers and are identity matrices, such that ,
The Algorithm 2 computes the derivatives for the spectrum of for the given M-matrices A and B and a set of pure real uncertainties The Algorithm 2 demands the input arguments as the M-matrices A, B, the set of pure real uncertainties in the form of block diagonal matrices, and a suitable choice for the parameter . The output of Algorithm 2 is spectrum before and after differentiation for the modified matrices and spectrum has a monotonically increasing behavior for all values of time t.
| Algorithm 2: Compute the derivative of the spectrum of . |
Data: , M-Matrix , M-Matrix _, uncertainty Result: Spectrum before and after Differentiation _, eigenvalues before Differentiation _, eigenvalues after Differentiation for i in 1 to for j in 1 to diff_ _ diff_t[i,j] _ end for end for AB S_ S× delta_t(t) _S_delta S_delta Sy i×thetay_) for i in 1 to _[i] × (transpose(z) ×_t×_) end for |
Proof.
The proof is similar to the proof of Theorem 6. □
Example 4.
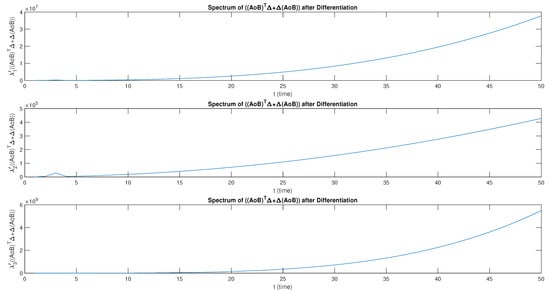
Let and be M-matrices, and let , be an admissible perturbation.
The eigenvalues and are obtained as positive and having smooth non-linear behavior before and after differentiation, as shown in Figure 6. The eigenvalue remains positive for , but then it has negative linear growth. However, the eigenvalue , as shown in Figure 7, becomes positive, possesses a positive smooth non-linear growth after the differentiation and satisfies the criterion, that is, for all .
Figure 6.
Spectrum of before differentiation.
Figure 7.
Spectrum of after differentiation.
The Algorithm 3 computes the derivatives for the spectrum of for the given M-matrices A and B and a set of pure real uncertainties The Algorithm 2 demands the input arguments as the M-matrices A, B, the set of pure real uncertainties in the form of block diagonal matrices, and a suitable choice for the parameter . The output of Algorithm 2 is spectrum before and after differentiation for the modified matrices and spectrum has a monotonically increasing behavior for all values of time t.
| Algorithm 3: Compute derivative of spectrum of |
Data: A, M-Matrix B, M-Matrix ⟵ _ , uncertainty Result: Spectrum before and after Differentiation _, eigenvalues before Differentiation _, eigenvalues after Differentiation for i in 1 to for j in 1 to diff_⟵ derivative of _ diff_t[i,j] ⟵ diff_ end for end for S A and B S___ _⟵ eigen vectors of S_ ⟵ eigen values of S_ y⟵ 0 y[1] ⟵ 1 z ⟵ transpose(S)×y r ⟵ exp(i×)× (_) for i in 1 to _[i] ⟵× (transpose(z) ×_t×_) end for |
5. Applications
In this section, we discuss the stability of dynamical systems. The bounds of structured singular values act as tools to study the stability of the dynamical system under consideration. For this purpose, we present the numerical testing for the computation of lower bounds of structured singular values for M-matrices.
Example 5.
Consider the two-dimensional convection–diffusion equation
where and represent the boundary of and q is a positive constant and p is a real number. The five-point finite difference scheme for diffusion terms and central difference scheme for connective terms, with the equidistant size for , yields the following linear system of equations with matrix A of order . The matrix
with
Here, is the mesh Reynolds number. For we have that
The very first column of the table given below represents the block diagonal structure . The notation represents the i-th block, which is an r-by-r repeated, diagonal real scalar perturbation. The notation represents the i-th block, which is an r-by-r repeated, diagonal complex scalar perturbation. The second and third columns represent the approximation of upper and lower bounds of structured singular values with a mussv function, available in the MATLAB Control Toolbox. The last column represents the computation of the lower bounds of structured singular values with Algorithm 1. In most cases, the lower bounds of structured singular values approximated by Algorithm 1 are sharper than those approximated by the mussv function.
| The approximation of bounds of structured singular values for M-matrices | |||
| BLK | mussv (u.b) | mussv (l.b) | Algorithm 1 (l.b) |
| 15.4142 | 15.1218 | 15.1218 | |
| 15.4142 | 15.0607 | 15.0213 | |
| 15.4142 | 15.4142 | 15.1025 | |
| 15.4142 | 15.4142 | 15.4142 | |
Example 6.
The positive definite matrices play an important role in discussing the stability of dynamical systems. We consider an M-matrix, which is a-symmetric, acts as a Stieltjes matrix, and is a positive definite matrix. The four-dimensional M-matrix is taken as
The very first column of the table below represents the block diagonal structure . The notation represents the i-th block, which is an r-by-r repeated, diagonal real-scalar perturbation. The notation represents the i-th block, which is an r-by-r repeated, diagonal complex scalar perturbation. The second and third columns represent the approximation of upper and lower bounds of structured singular values with the mussv function, available in the MATLAB Control Toolbox. The last column represents the computation of the lower bounds of structured singular values with Algorithm 1. In most cases, the lower bounds of structured singular values approximated by Algorithm 1 are sharper than those approximated by the mussv function.
| The approximation of bounds of structured singular values for M-matrices | |||
| BLK | mussv (u.b) | mussv (l.b) | Algorithm 1 (l.b) |
| 3.6180 | 3.6180 | 3.6180 | |
| 3.6180 | 3.6180 | 3.6153 | |
| 3.6180 | 3.5615 | 3.5518 | |
| 3.5180 | 3.5180 | 13.5180 | |
Example 7.
Consider the system of linear equations
where the matrix with The M-matrix is with
The very first column of the table below represents the block diagonal structure . The notation represents the i-th block, which is an r-by-r repeated, diagonal real-scalar perturbation. The notation represents the i-th block, which is an r-by-r repeated, diagonal complex scalar perturbation. The second and third columns represent the approximation of upper and lower bounds of structured singular values with the mussv function, available in the MATLAB Control Toolbox. The last column represents the computation of the lower bounds of structured singular values with Algorithm 1. In most cases, the lower bounds of structured singular values approximated by Algorithm 1 are sharper than those approximated by the mussv function.
| The approximation of bounds of structured singular values for M-matrices | |||
| BLK | mussv (u.b) | mussv (l.b) | Algorithm 1 (l.b) |
| 12 | 11.7724 | 11.7724 | |
| 12 | 11.8125 | 11.8041 | |
| 12 | 12 | 11.9532 | |
| 12 | 12 | 11.9532 | |
6. Conclusions
In this article, we have conferred the computation of structured singular values for M-matrices. The numerical approximation of lower bounds of structured singular values for M-matrices with respect to a set of pure real scalar blocks and full blocks are presented and analyzed. New algorithms are presented to observe the behaviors of the spectrum of perturbed M-matrices and . The numerical testing for the various examples on M-matrices agrees with the fact that:
1. The behaviors of the spectrum of and follow the extremality conditions of for .
2. The spectrum of and remains smooth and possesses monotonically increasing behavior after differentiation.
3. The spectrum of and does contain negative values before making use of the eigenvalue perturbation results of differentiation for all .
4. The spectrum of and becomes non-negative after differentiation for all .
The computation of upper bounds of M-matrices corresponding to dynamical systems via a low-rank ordinary differential-equations-based technique is the focus of future work.
Author Contributions
Conceptualization: M.-U.R. and J.A.; methodology: M.-U.R. and S.K.; investigation: J.A. and N.F.; resources: N.F. and S.K.; writing—original draft preparation: M.-U.R. and J.A.; writing—review and editing: N.F.. and S.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
This not applicable to our article as we have not used and collected any data.
Acknowledgments
The authors appreciate the anonymous reviewers’ insightful comments and recommendations. J. Alzabut and N. Fatima express their sincere thanks to Prince Sultan University and OSTIM Technical University for their endless support.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Doyle, J.C.; Wall, J.; Stein, G. Performance and robustness analysis for structured uncertainty. In Proceedings of the 1982 21st IEEE Conference on Decision and Control, Orlando, FL, USA, 8–10 December 1982; pp. 629–636. [Google Scholar]
- Doyle, J. Analysis of feedback systems with structured uncertainties. IEE Proc. Control Theory Appl. 1982, 129, 242–250. [Google Scholar] [CrossRef]
- Bernhardsson, B.; Rantzer, A.; Qiu, L. Real perturbation values and real quadratic forms in a complex vector space. Linear Algebra Appl. 1998, 270, 131–154. [Google Scholar] [CrossRef]
- Braatz, R.P.; Young, P.M.; Doyle, J.C.; Morari, M. Computational complexity of μ calculation. IEEE Trans. Automat. Control 1994, 39, 1000–1002. [Google Scholar] [CrossRef]
- Butta, P.; Guglielmi, N.; Noschese, S. Computing the structured pseudospectrum of a Toeplitz matrix and its extreme points. SIAM J. Matrix Anal. Appl. 2012, 33, 1300–1319. [Google Scholar] [CrossRef]
- Chen, J.; Fan, M.K.; Nett, C.N. Structured singular values with nondiagonal structures. I. Characterizations. IEEE Trans. Automat. Control 1996, 41, 1057–1511. [Google Scholar]
- Guglielmi, N.; Kressner, D.; Lubich, C. Computing extremal points of symplectic pseudospectra and solving symplectic matrix nearness problems. SIAM J. Matrix Anal. Appl. 2014, 35, 1407–1428. [Google Scholar] [CrossRef]
- Guglielmi, N.; Kressner, D.; Lubich, C. Low rank differential equations for Hamiltonian matrix nearness problems. Numer. Math. 2015, 129, 279–319. [Google Scholar] [CrossRef]
- Guglielmi, N.; Lubich, C. Differential equations for roaming pseudospectra: Paths to extremal points and boundary tracking. SIAM J. Numer. Anal. 2011, 49, 1194–1209. [Google Scholar] [CrossRef]
- Guglielmi, N.; Manetta, M. Approximating real stability radii. IMA J. Numer. Anal. 2015, 35, 1402–1425. [Google Scholar] [CrossRef]
- Kato, T. Perturbation Theory for Linear Operators; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- Packard, A.; Doyle, J.C. The complex structured singular value. Automatica 1993, 29, 71–109. [Google Scholar] [CrossRef]
- Dailey, R.L. A new algorithm for the real structured singular value. In Proceedings of the 1990 American Control Conference, San Diego, CA, USA, 23–25 May 1990; pp. 3036–3040. [Google Scholar]
- de Gaston, R.R.E. Non-Conservative Calculation of the Multi-Loop Stability Margin. Ph.D. Thesis, University of Southern California, Los Angeles, CA, USA, 1985. [Google Scholar]
- de Gaston, R.R.E.; Safonov, M.G. Exact calculation of the multitop stability margin. IEEE Trans. Autom. Control 1988, 33, 156–171. [Google Scholar] [CrossRef]
- Sideris, A.; de Gaston, R.R.E. Multi variable stability calculation with uncertain correlated parameters. In Proceedings of the IEEE Conference on Decision and Control, Athens, Greece, 10–12 December 1986; pp. 766–771. [Google Scholar]
- Pefia, R.S.S.; Sideris, A. A general program to compute the multivariable stability margin for systems with parametric uncertainty. In Proceedings of the American Control Conference, Atlanta, GA, USA, 15–17 June 1988. [Google Scholar]
- Chang, B.C.; Ekdal, O.; Yeh, H.H.; Banda, S.S. Computation of the real structured singular value via polytopic polynomials. In Proceedings of the AIAA Conference on Guidance Navigation and Control, Boston, MA, USA, 14–16 August 1989. [Google Scholar]
- Yazıcı, A.; Karamancıoğlu, A.; Kasimbeyli, R. A nonlinear programming technique to compute a tight lower bound for the real structured singular value. Optim. Eng. 2011, 12, 445–458. [Google Scholar] [CrossRef]
- Rehman, M.U.; Alzabut, J.; Brohi, J.H. Computing µ-values for LTI Systems. AIMS Math 2021, 6, 304–313. [Google Scholar] [CrossRef]
- Rehman, M.U.; Iqbal, S.; Alzabut, J.; El-Nabulsi, R.A. Stability Analysis of LTI System with Diagonal Norm Bounded Linear Differential Inclusions. Symmetry 2021, 13, 152. [Google Scholar] [CrossRef]
- Troeng, O. Five-Full-Block Structured Singular Values of Real Matrices Equal Their Upper Bounds. IEEE Control Syst. Lett. 2020, 5, 583–586. [Google Scholar] [CrossRef]
- Rehman, M.U.; Alzabut, J.; Ateeq, T.; Kongson, J.; Sudsutad, W. The Dual Characterization of Structured and Skewed Structured Singular Values. Mathematics 2022, 10, 2050. [Google Scholar] [CrossRef]
- Chen, K.C.; Wang, C.S.; Yen, C.C. Numerical algorithms for the largest structured singular value of μ–synthesis control system. Taiwan. J. Math. 2010, 14, 973–998. [Google Scholar] [CrossRef]
- Pankov, P.S.; Zheentaeva, Z.K.; Shirinov, T. Asymptotic reduction of solution space dimension for dynamical systems. Twms J. Pure Appl. Math. 2021, 12, 243–253. [Google Scholar]
- Musaev, H.K. The Cauchy problem for degenerate parabolic convolution equation. Twms J. Pure Appl. Math. 2021, 12, 278–288. [Google Scholar]
- Sunday, J.; Shokri, A.; Marian, D. Variable step hybrid block method for the approximation of Kepler problem. Fractal Fract. 2022, 6, 343. [Google Scholar] [CrossRef]
- Rehman, M.U.; Alzabut, J.; Hyder, A. Quadratic stability of non-linear systems modeled with norm bounded linear differential inclusions. Symmetry 2020, 12, 1432. [Google Scholar] [CrossRef]
- Iqbal, A.; Waqar, A.; Madurai Elavarasan, R.; Premkumar, M.; Ahmed, T.; Subramaniam, U.; Mekhilef, S. Stability assessment and performance analysis of new controller for power quality conditioning in microgrids. Int. Trans. Electr. Energy Syst. 2021, 6, e12891. [Google Scholar] [CrossRef]
- Sergiyenko, O.; Zhirabok, A.; Ibraheem, I.K.; Zuev, A.; Filaretov, V.; Azar, A.T.; Hameed, I.A. Interval Observers for Discrete-Time Linear Systems with Uncertainties. Symmetry 2022, 14, 2131. [Google Scholar] [CrossRef]
- Sakthivel, R.; Harshavarthini, S.; Almakhles, D.J.; Kavikumar, R. Design of uncertainty and disturbance estimator based tracking control for fuzzy switched systems. IET Control. Theory Appl. 2021, 15, 1804–1817. [Google Scholar] [CrossRef]
- Plemmons, R.J. M-matrix characterizations. I—nonsingular M-matrices. Linear Algebra Its Appl. 1977, 18, 175–188. [Google Scholar] [CrossRef]
- Strang, G. Linear Algebra and Its Applications; Thomson, Brooks/Cole: Belmont, CA, USA, 2006. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).