






Finite-Time Bounded Tracking Control for a Class of Neutral Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
2.1. Problem Statements
2.2. Some Related Assumptions and Lemmas
3. Main Results
3.1. Construction of an Error System
3.2. Finite-Time Bounded Tracking Control of the Error System
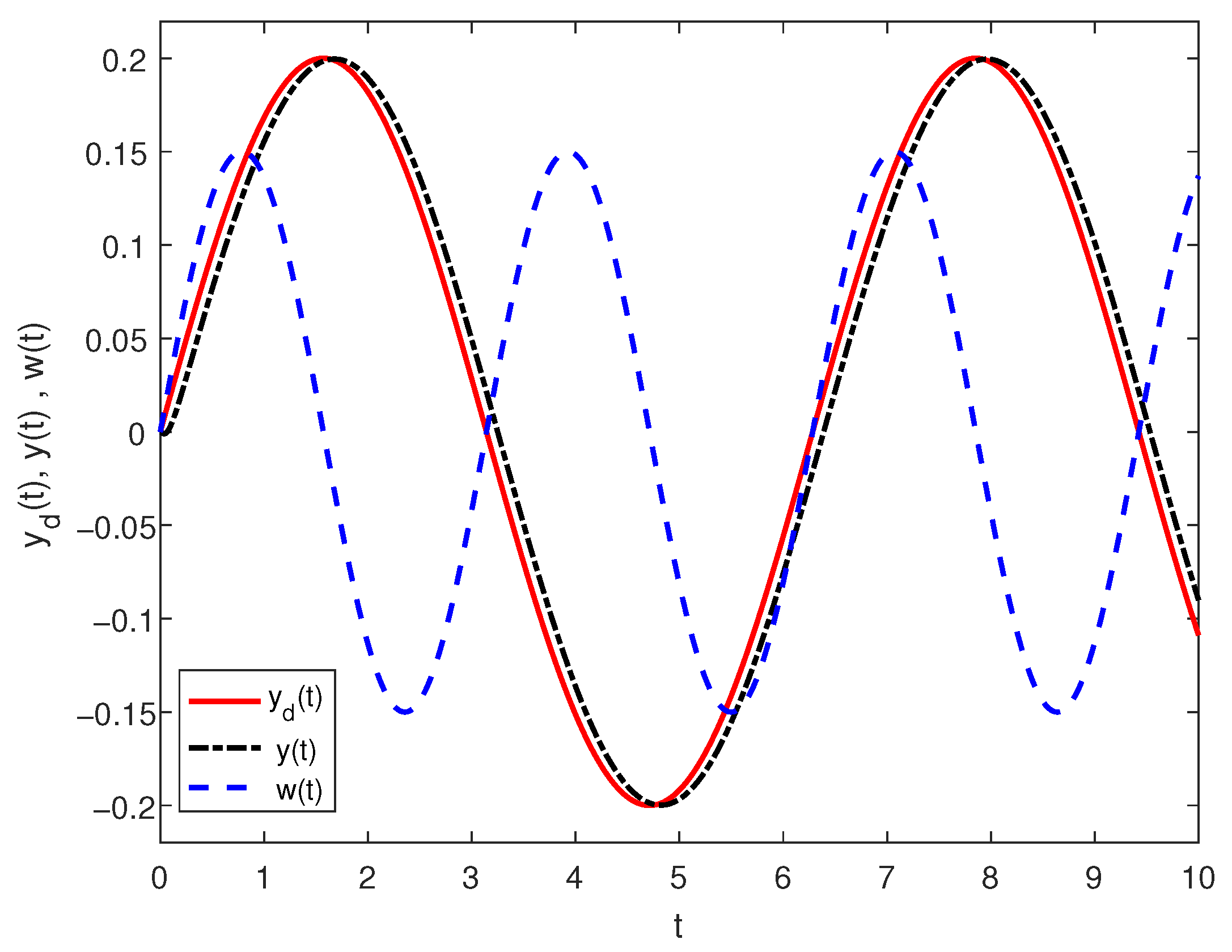
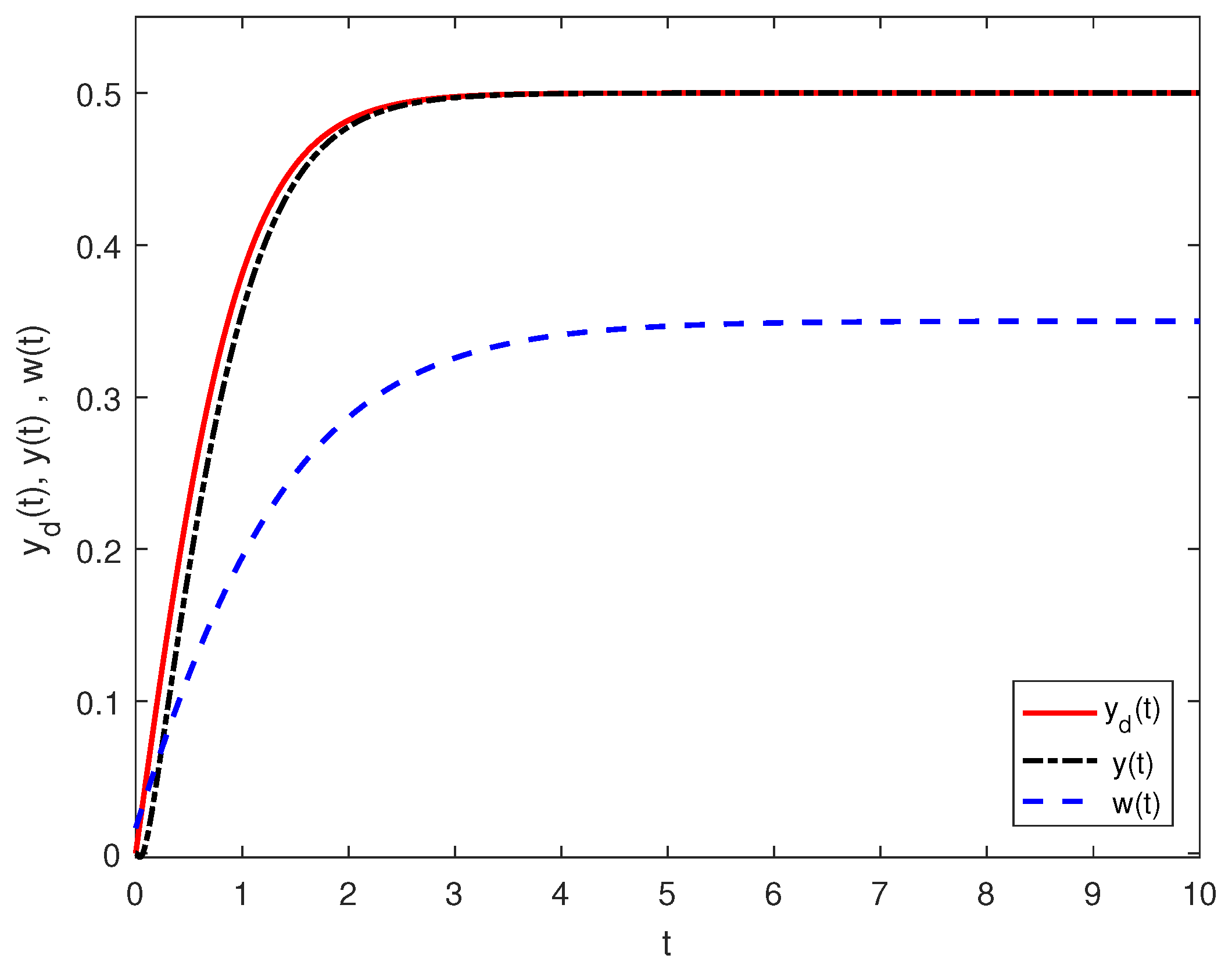
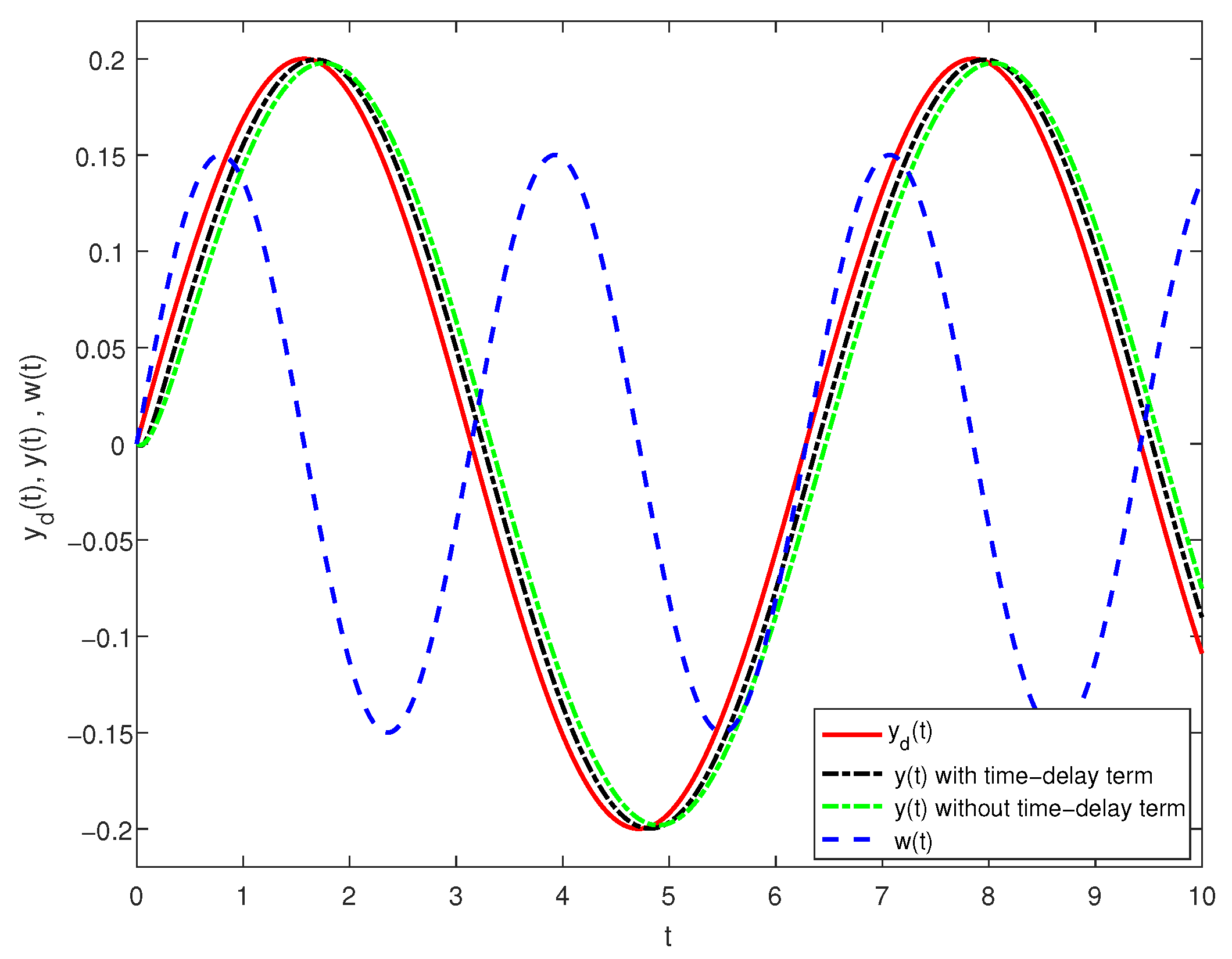
4. Numerical Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Clarke, F.H.; Ledyaev, Y.S.; Stern, R.J. Asymptotic stability and smooth Lyapunov functions. J. Differ. Equ. 1998, 149, 69–114. [Google Scholar] [CrossRef]
- Clarke, F.H.; Ledyaev, Y.S.; Sontag, E.D.; Subbotin, A.I. Asymptotic controllability implies feedback stabilization. IEEE Trans. Autom. Control 1997, 42, 1394–1407. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Amato, F.; Ariola, M.; Cosentino, C. Finite-time stability of linear time-varying systems: Analysis and controller design. IEEE Trans. Autom. Control 2010, 55, 1003–1008. [Google Scholar] [CrossRef]
- Lee, J.; Haddad, W.M. On finite-time stability and stabilization of nonlinear hybrid dynamical systems. AIMS Math. 2021, 6, 5535–5562. [Google Scholar] [CrossRef]
- Kussaba, H.T.; Borges, R.A.; Ishihara, J.Y. A new condition for finite time boundedness analysis. J. Frankl. Inst. 2015, 352, 5514–5528. [Google Scholar] [CrossRef]
- Khoo, S.; Yin, J.; Man, Z.; Yu, X. Finite-time stabilization of stochastic nonlinear systems in strict-feedback form. Automatica 2013, 49, 1403–1410. [Google Scholar] [CrossRef]
- Hei, X.; Wu, R. Finite-time stability of impulsive fractional-order systems with time-delay. Appl. Math. Model. 2016, 40, 4285–4290. [Google Scholar] [CrossRef]
- Wu, G.C.; Baleanu, D.; Zeng, S.D. Finite–time stability of discrete fractional delay systems: Gronwall inequality and stability criterion. Commun. Nonlinear Sci. 2018, 57, 299–308. [Google Scholar] [CrossRef]
- Dorato, P. Short-Time Stability in Linear Time-Varying Systems; Polytechnic Institute of Brooklyn: Ann Arbor, MI, USA, 1961. [Google Scholar]
- Weiss, L.; Infante, E.F. Finite time stability under perturbing forces and on product spaces. IEEE Trans. Autom. Control 1967, 12, 54–59. [Google Scholar] [CrossRef]
- Moulay, E.; Dambrine, M.; Yeganefar, N.; Perruquetti, W. Finite-time stability and stabilization of time-delay systems. Syst. Control Lett. 2008, 57, 561–566. [Google Scholar] [CrossRef]
- Chen, X.; Hu, M. Finite-time stability and controller design of continuous-Time polynomial fuzzy systems. Abstr. Appl. Anal. 2017, 2017, 3273480. [Google Scholar] [CrossRef]
- Zimenko, K.; Efimov, D.; Polyakov, A. Adaptive finite-time and fixed-time control design using output stability conditions. Int. J. Robust Nonlinear Control 2022, 32, 6361–6378. [Google Scholar] [CrossRef]
- Xu, J.; Wang, L.; Liu, Y.; Sun, J.; Pan, Y. Finite-time adaptive optimal consensus control for multi-agent systems subject to time-varying output constraints. Appl. Math. Comput. 2022, 427, 127176. [Google Scholar] [CrossRef]
- Jin, X. Adaptive finite-time tracking control for joint position constrained robot manipulators with actuator faults. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 6018–6023. [Google Scholar]
- Zhang, J.; Xia, J.; Sun, W.; Zhuang, G.; Wang, Z. Finite-time tracking control for stochastic nonlinear systems with full state constraints. Appl. Math. Comput. 2018, 338, 207–220. [Google Scholar] [CrossRef]
- Jing, Y.; Liu, Y.; Zhou, S. Prescribed performance finite-time tracking control for uncertain nonlinear systems. J. Syst. Sci. Complex. 2019, 32, 803–817. [Google Scholar] [CrossRef]
- Fu, M.; Xu, Y. Finite-time tracking control for a class of MIMO nonlinear systems with unknown asymmetric saturations. Math. Probl. Eng. 2017, 2017, 9452171. [Google Scholar]
- Huang, S.; Xiang, Z. Finite-time output tracking for a class of switched nonlinear systems. Int. J. Robust Nonlinear Control 2017, 27, 1017–1038. [Google Scholar] [CrossRef]
- Xie, H.; Liao, F.; Chen, Y.; Zhang, X.; Li, M.; Deng, J. Finite-time bounded tracking control for fractional-order systems. IEEE Access 2021, 9, 11014–11023. [Google Scholar] [CrossRef]
- Gui, H.; Vukovich, G. Finite-time angular velocity observers for rigid-body attitude tracking with bounded inputs. Int. J. Robust Nonlinear Control 2017, 27, 15–38. [Google Scholar] [CrossRef]
- Liao, F.; Wu, Y. Finite-time bounded tracking control for linear continuous systems with time-delay. J. Control Decis. 2019, 34, 2095–2104. [Google Scholar]
- Amato, F.; Ambrosino, R.; Cosentino, C.; Tommasi, G. Technical communique input-output finite time stabilization of linear systems. J. Control Decis. 2019, 34, 2095–2104. [Google Scholar]
- Amato, F.; Carannante, G.; Tommasi, G.D. Input–output finite-time stabilisation of a class of hybrid systems via static output feedback. Int. J. Control 2011, 84, 1055–1066. [Google Scholar] [CrossRef]
- Amato, F.; Tommasi, G.D.P.A. Necessary and sufficient conditions for input-output finite-time stability of impulsive dynamical systems. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 5998–6003. [Google Scholar]
- Amato, F.; Tommasi, G.D.; Pironti, A. Input–output finite-time stabilization of impulsive linear systems: Necessary and sufficient conditions. Nonlinear Anal. Hybrid Syst. 2016, 19, 93–106. [Google Scholar] [CrossRef]
- Amato, F.; Carannante, G.; Tommasi, G.D.; Pironti, A. Input-output finite-time stabilisation of linear systems with input constraints. IET Control Theory Appl. 2014, 8, 1429–1438. [Google Scholar] [CrossRef]
- Haotian, W.; Yanqian, W.; Guangming, Z. Asynchronous H∞ controller design for neutral singular Markov jump systems under dynamic event-triggered schemes. J. Frankl. Inst. Eng. Appl. Math. 2021, 358, 494–515. [Google Scholar]
- Aghayan, Z.S.; Alfi, A.; Mousavi, Y.; Kucukdemiral, I.B.; Fekih, A. Guaranteed cost robust output feedback control design for fractional-order uncertain neutral delay systems. Chaos Solitons Fractals 2022, 163, 112523. [Google Scholar] [CrossRef]
- Aghayan, Z.S.; Alfi, A.; Machado, J.T. Guaranteed cost-based feedback control design for fractional-order neutral systems with input-delayed and nonlinear perturbations. ISA Trans. 2022, 131, 95–107. [Google Scholar] [CrossRef]
- Aghayan, Z.S.; Alfi, A.; Tenreiro Machado, J. Observer-based control approach for fractional-order delay systems of neutral type with saturating actuator. Math. Methods Appl. Sci. 2021, 44, 8554–8564. [Google Scholar] [CrossRef]
- Ghadiri, H.; Khodadadi, H.; Mobayen, S.; Asad, J.H.; Rojsiraphisal, T.; Chang, A. Observer-based robust control method for switched neutral systems in the presence of interval time-varying delays. Mathematics 2021, 9, 2473. [Google Scholar] [CrossRef]
- Yali, D.; Wanjun, L.; Tianrui, L.; Shuang, L. Finite-time boundedness analysis and H∞ control for switched neutral systems with mixedtime-varying delays. J. Frankl. Inst. 2017, 354, 787–811. [Google Scholar]
- Hongfei, L. Robust Control for Neutral Delay Systems; Northwestern Polytechnical University Press: Xi’an China, 2006. [Google Scholar]
- Qing-Long, H. Improved stability criteria and controller design for linear neutral systems. Automatica 2009, 45, 1948–1952. [Google Scholar]
- Kwon, O.; ParkJu, H.; Lee, S. Augmented Lyapunov functional approach to stability of uncertain neutral systems with time-varying delays. Appl. Math. Comput. 2009, 207, 202–212. [Google Scholar] [CrossRef]
- Fucheng, L.; Jiang, W.; Tomizuka, M. An improved delay-dependent stability criterion for linear uncertain systems with multiple time-varying delays. Int. J. Control 2014, 87, 861–873. [Google Scholar]
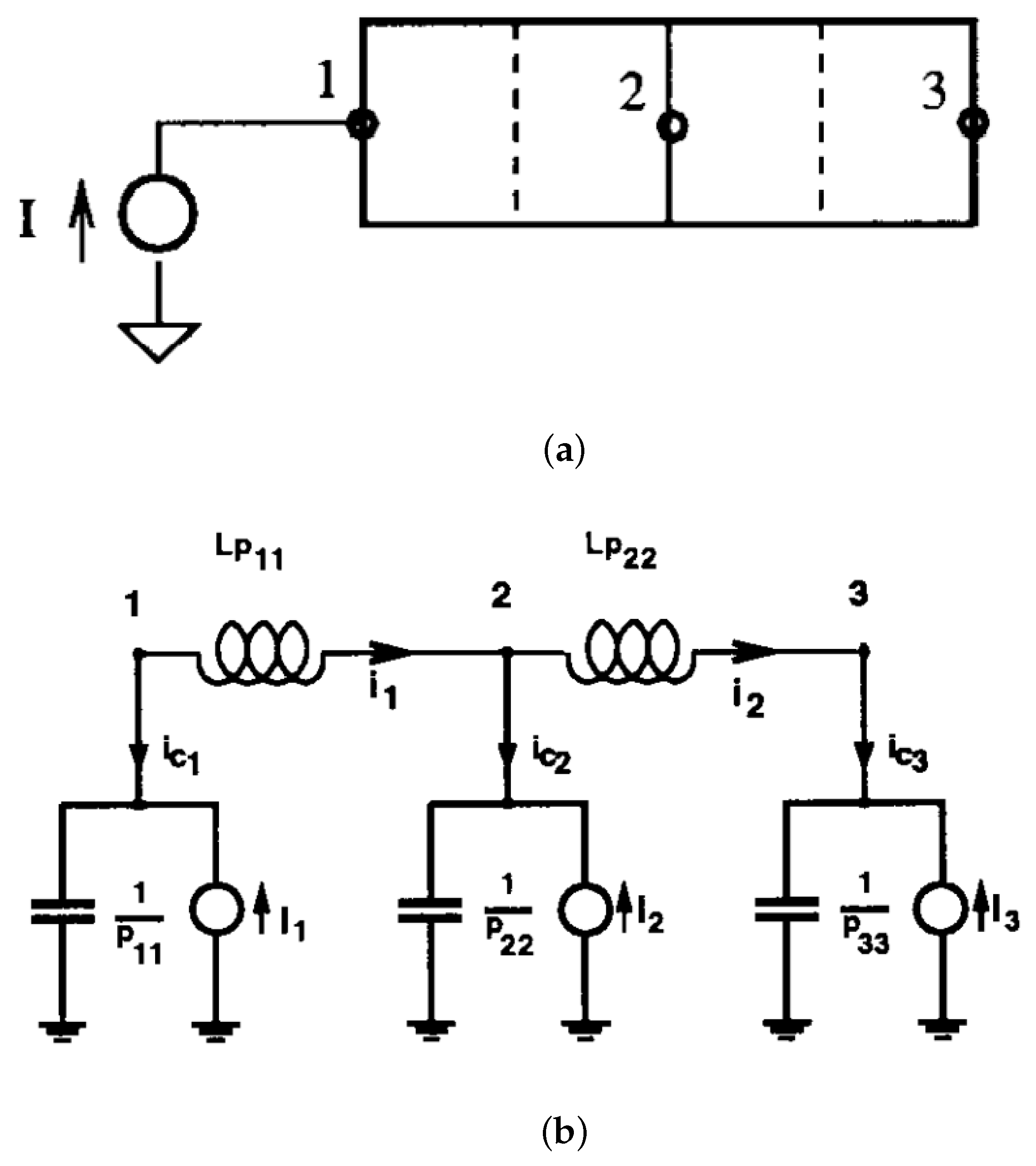
- Bellen, A.; Guglielmi, N.; Ruehli, A.E. Methods for linear systems of circuit delay differential equations of neutral type. IEEE Trans. Autom. Control 1999, 46, 212–216. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Xu, Y.; Xie, H.; Zou, Y. Finite-Time Bounded Tracking Control for a Class of Neutral Systems. Mathematics 2023, 11, 1199. https://doi.org/10.3390/math11051199
Wu J, Xu Y, Xie H, Zou Y. Finite-Time Bounded Tracking Control for a Class of Neutral Systems. Mathematics. 2023; 11(5):1199. https://doi.org/10.3390/math11051199
Chicago/Turabian StyleWu, Jiang, Yujie Xu, Hao Xie, and Yao Zou. 2023. "Finite-Time Bounded Tracking Control for a Class of Neutral Systems" Mathematics 11, no. 5: 1199. https://doi.org/10.3390/math11051199
APA StyleWu, J., Xu, Y., Xie, H., & Zou, Y. (2023). Finite-Time Bounded Tracking Control for a Class of Neutral Systems. Mathematics, 11(5), 1199. https://doi.org/10.3390/math11051199