
Adaptive Controller for Bus Voltage Regulation on a DC Microgrid Using a Sepic/Zeta Battery Charger/Discharger
 , , , and
, , , and 
Abstract
:1. Introduction
2. Modeling and Design of the Power Stage
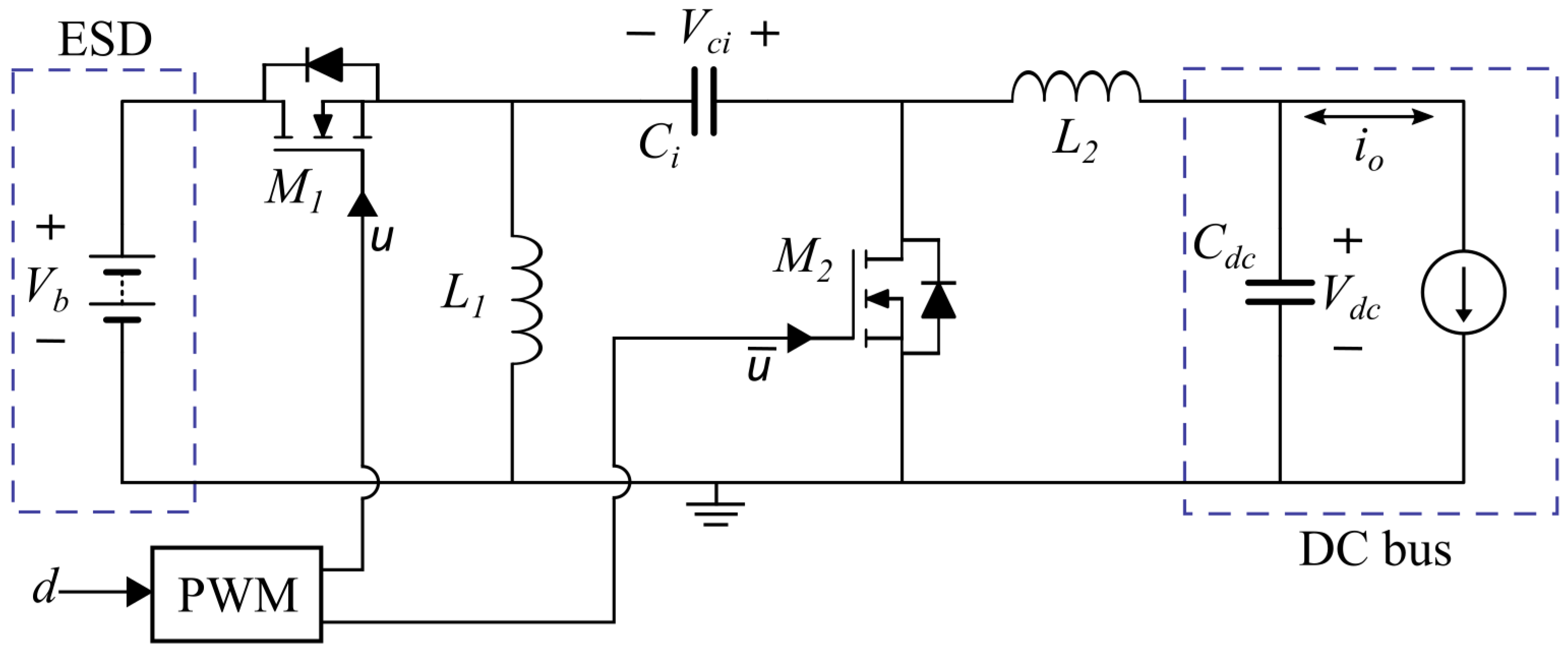
2.1. Circuital Interface
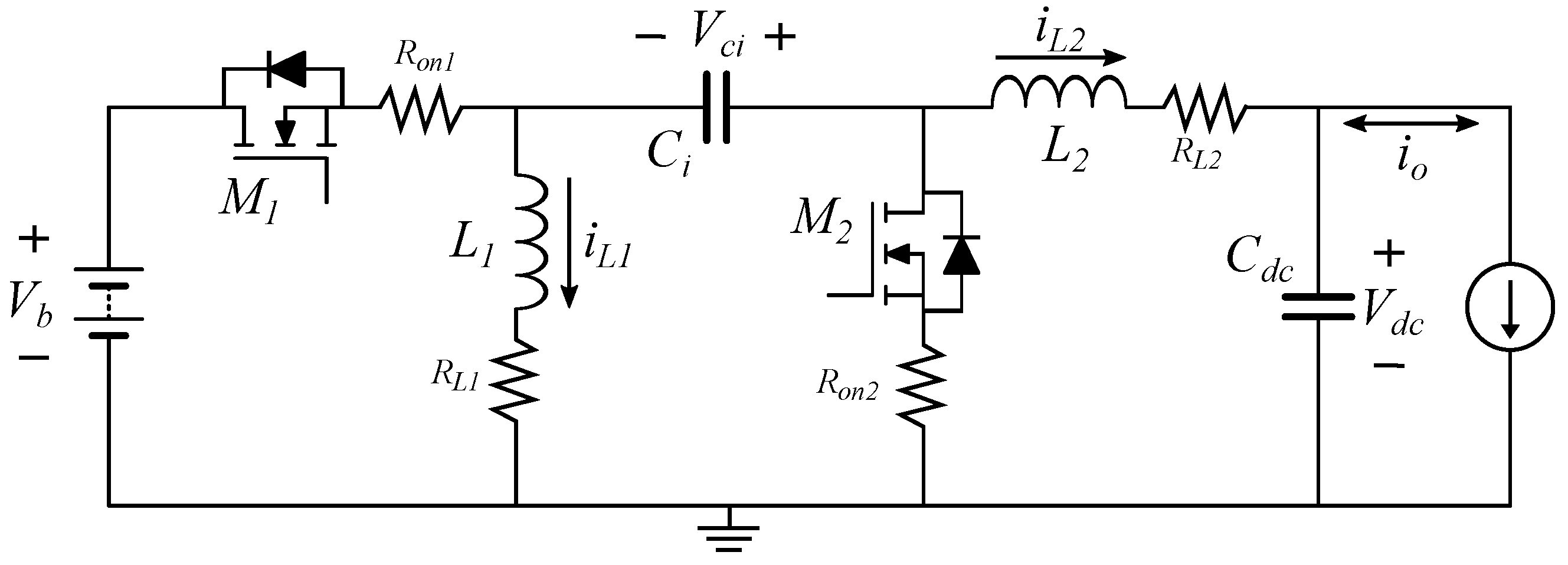
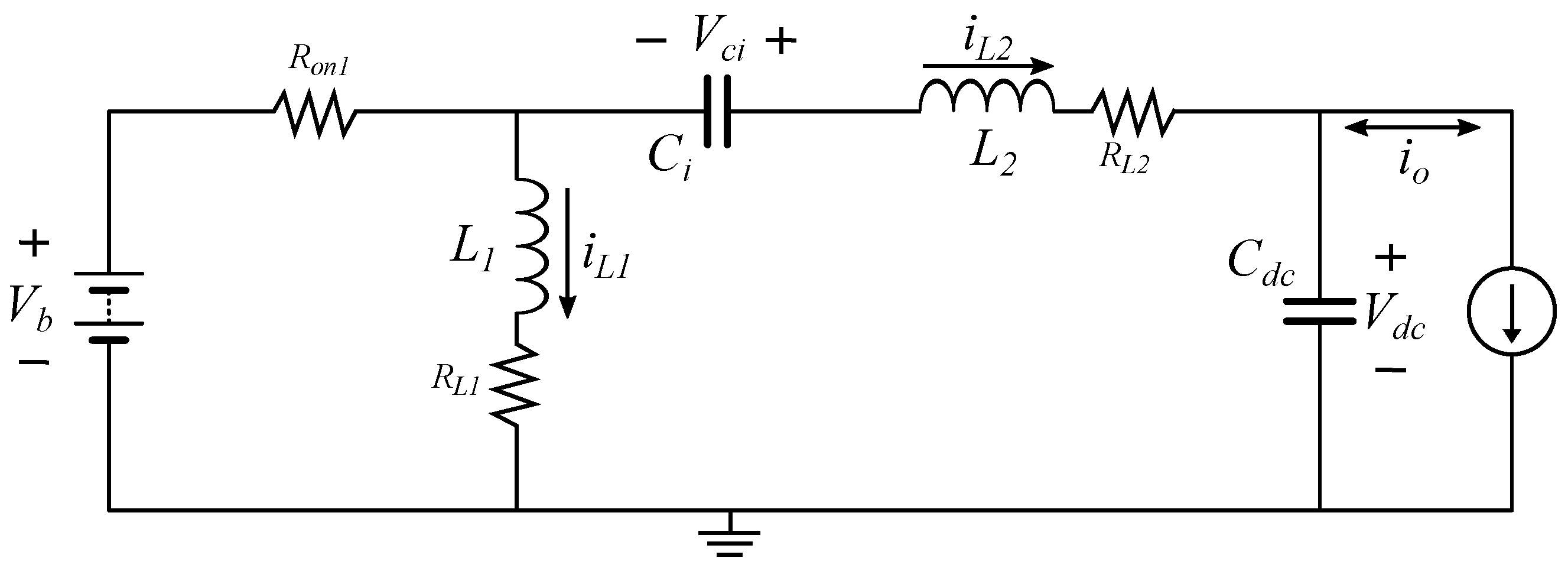
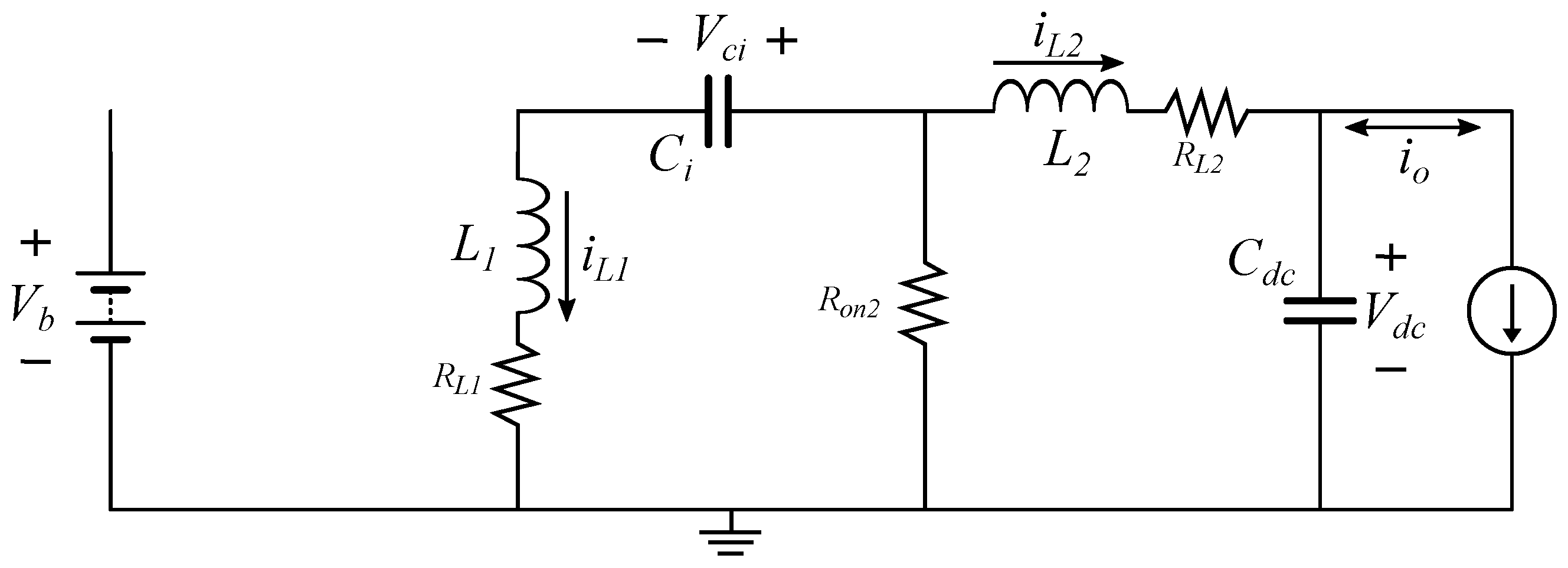
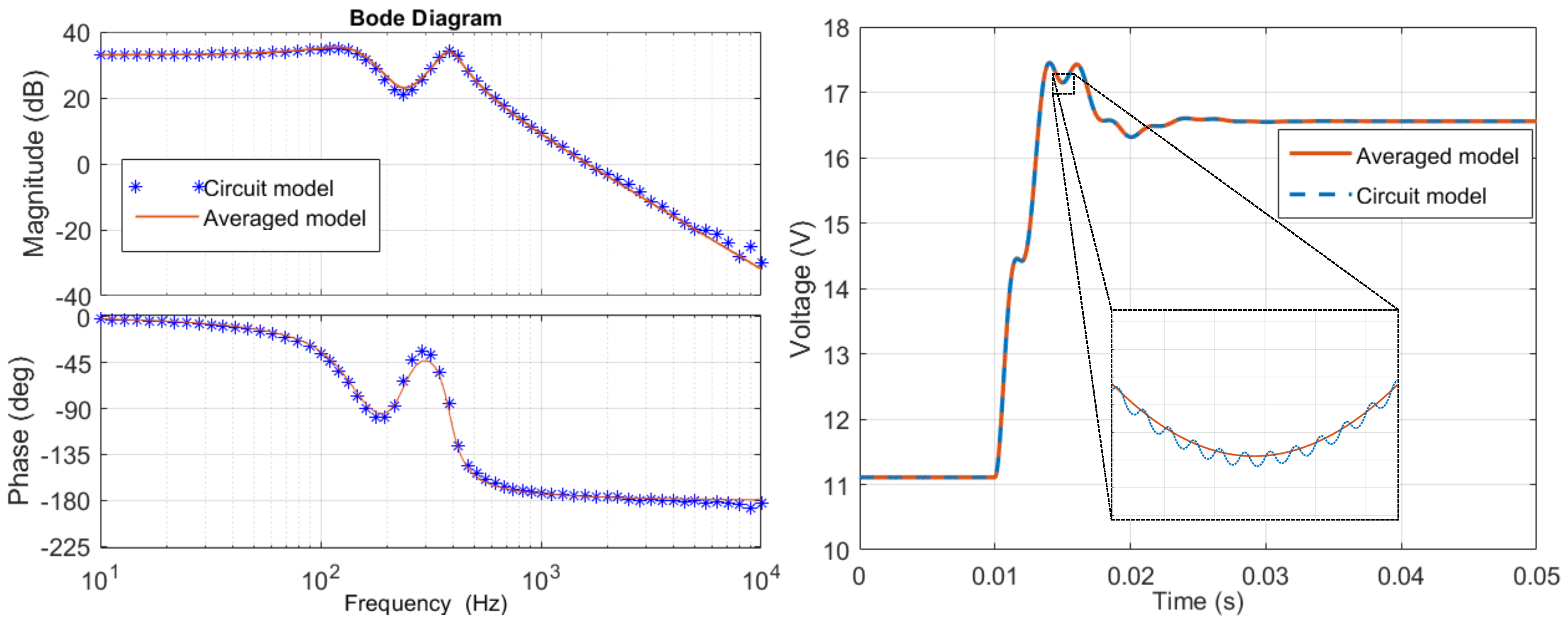
2.2. Control-Oriented Model
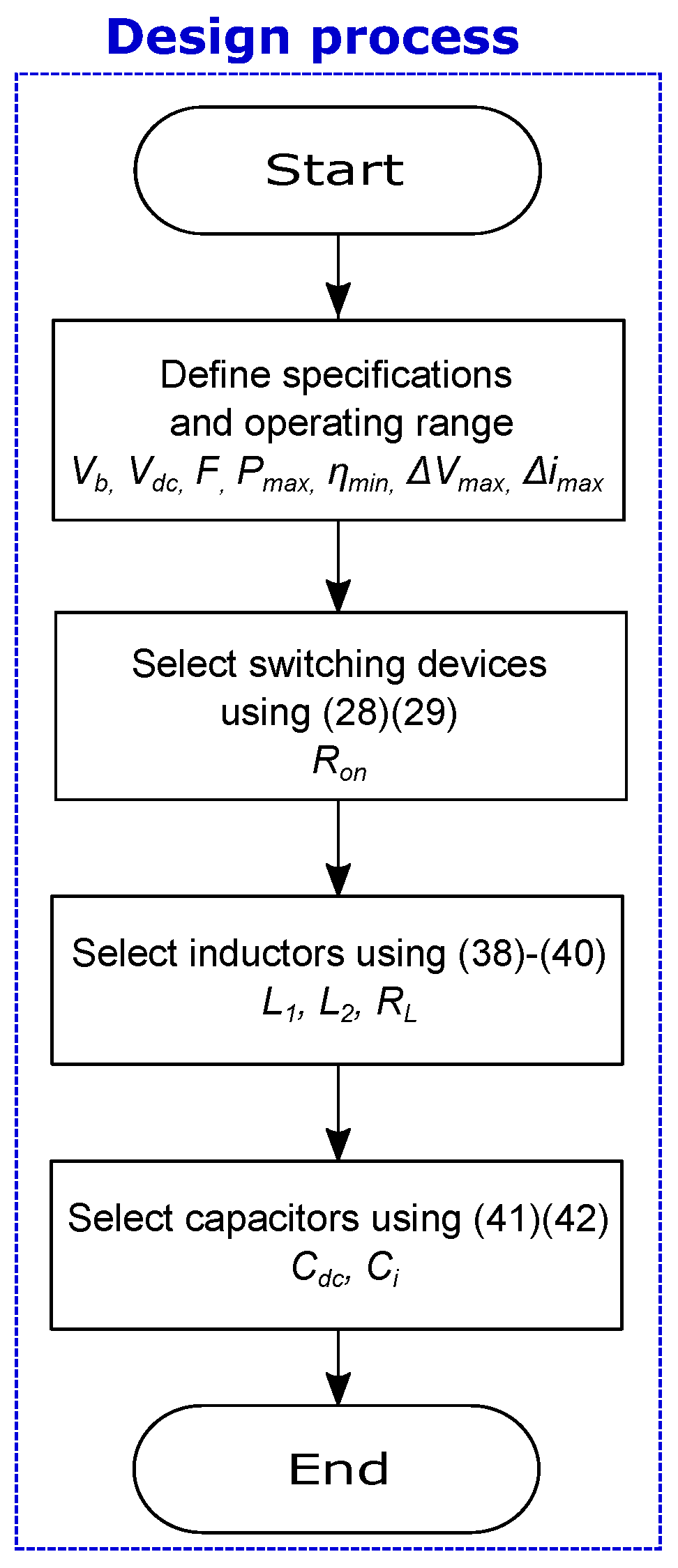
2.3. Design of the Power Stage
- Range of dc bus voltage;
- Maximum voltage ripple accepted in the dc bus;
- Maximum power exchange with the dc bus;
- Range of the battery voltage;
- Maximum current ripple accepted in the converter inductors;
- Minimum efficiency accepted for the charger/discharger.
3. Adaptive LQG Voltage Controller
3.1. LQI Controller Design
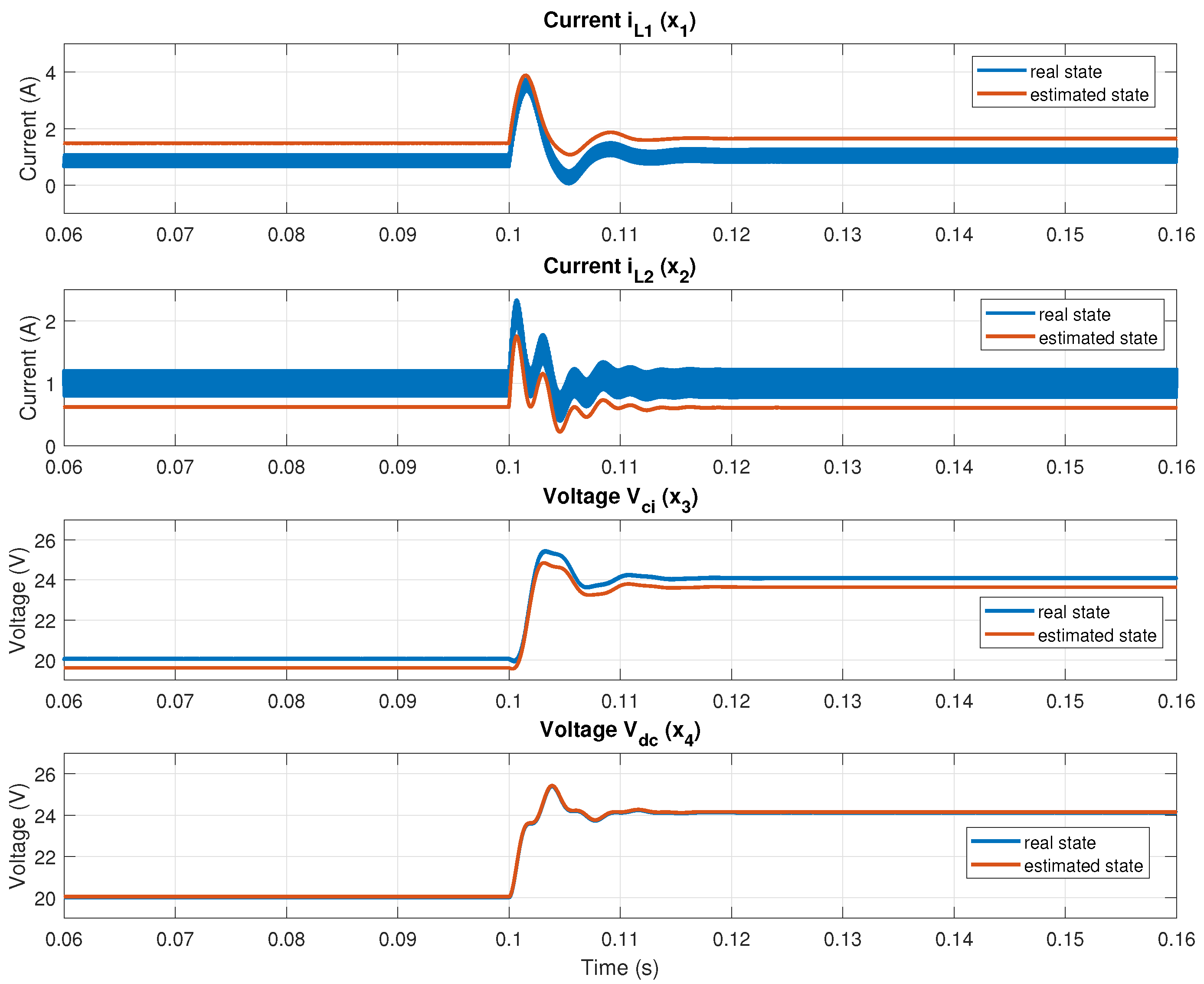
3.2. State Observer
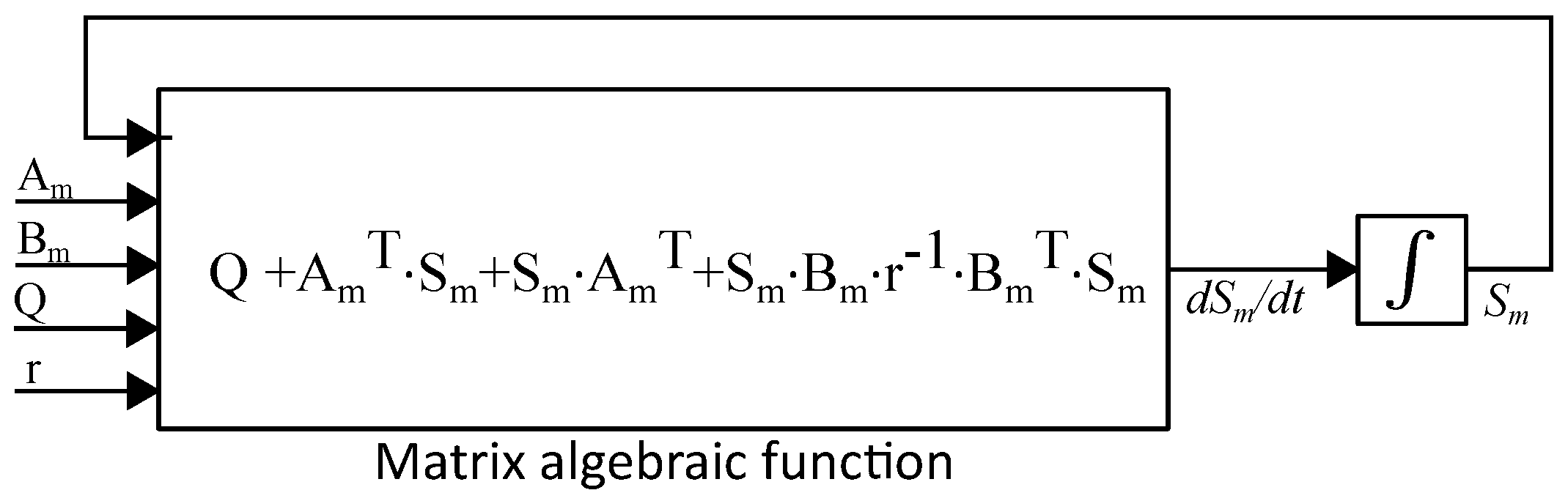
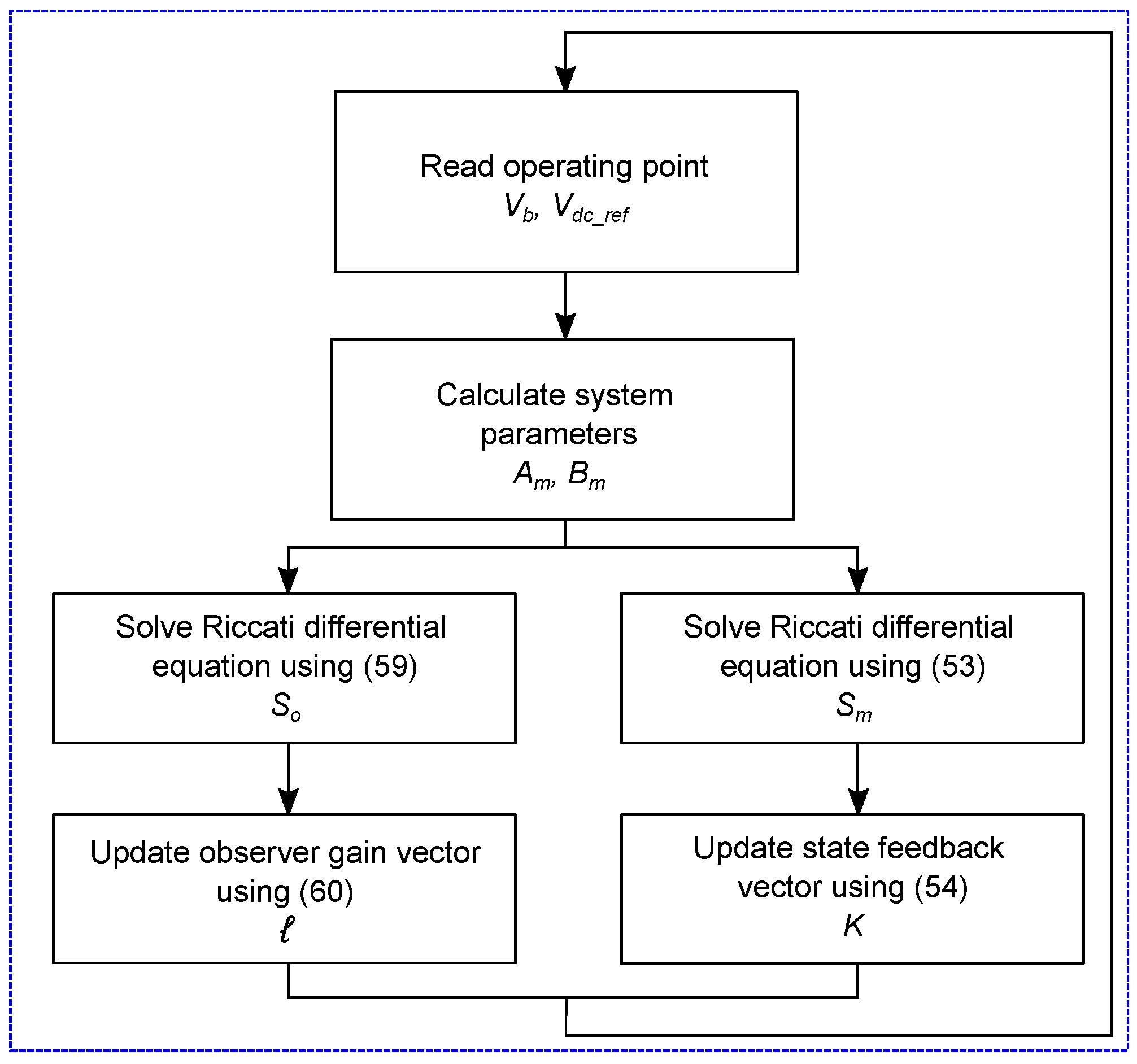
3.3. Adaptive Parameters of the LQI Controller
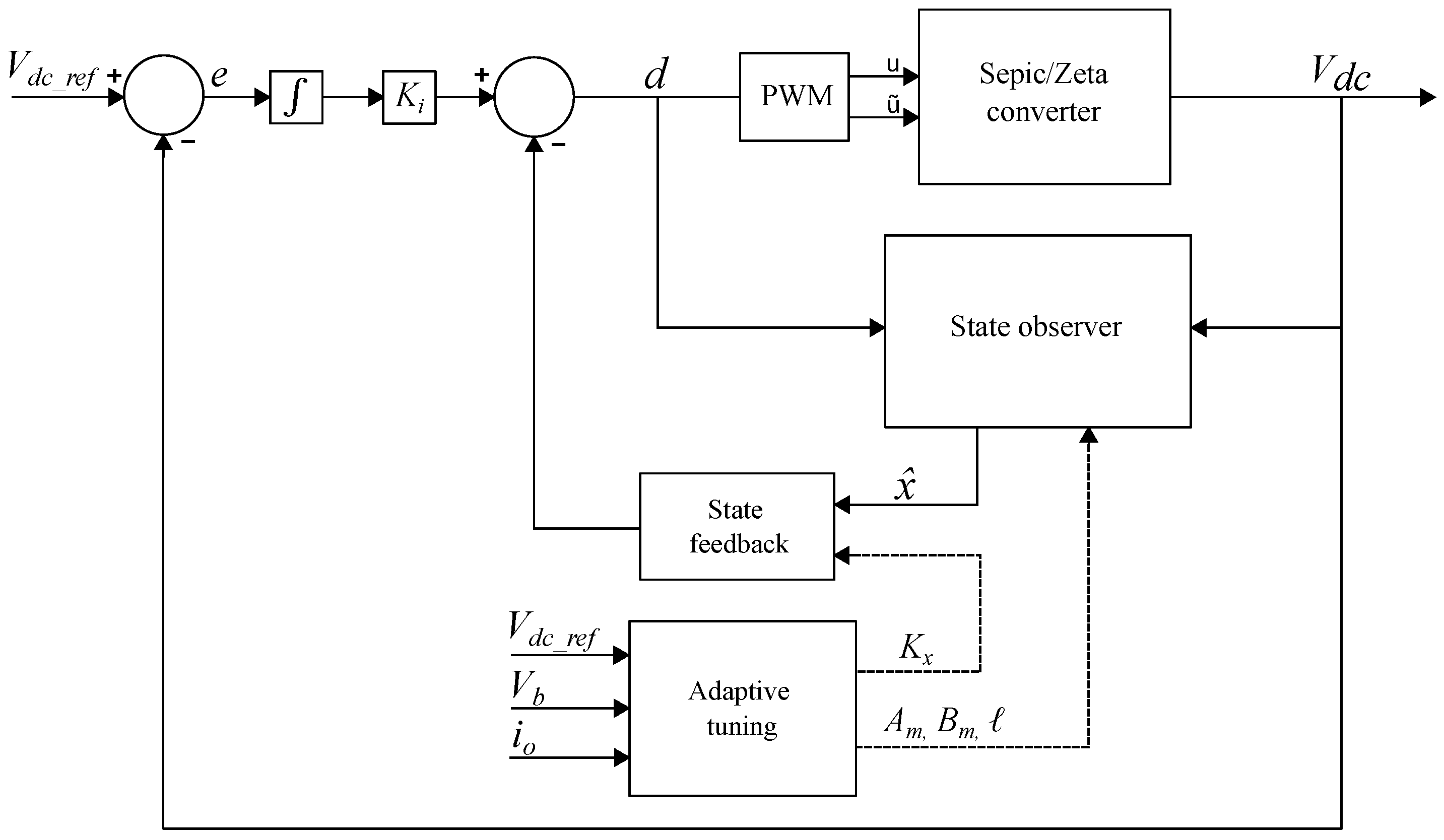
3.4. Structure of the Adaptive LQI Voltage Controller
4. Design Example and Simulation Results
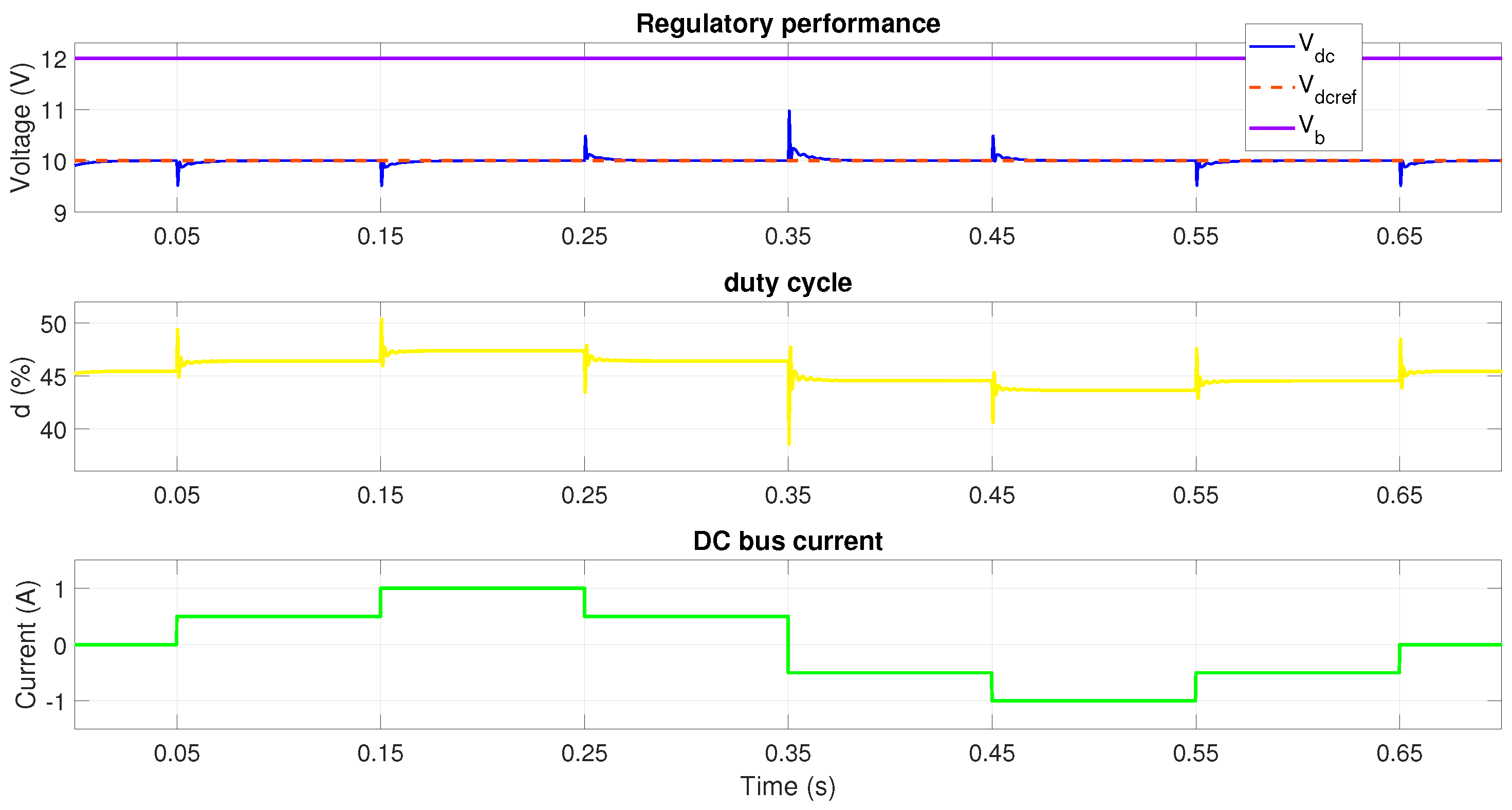
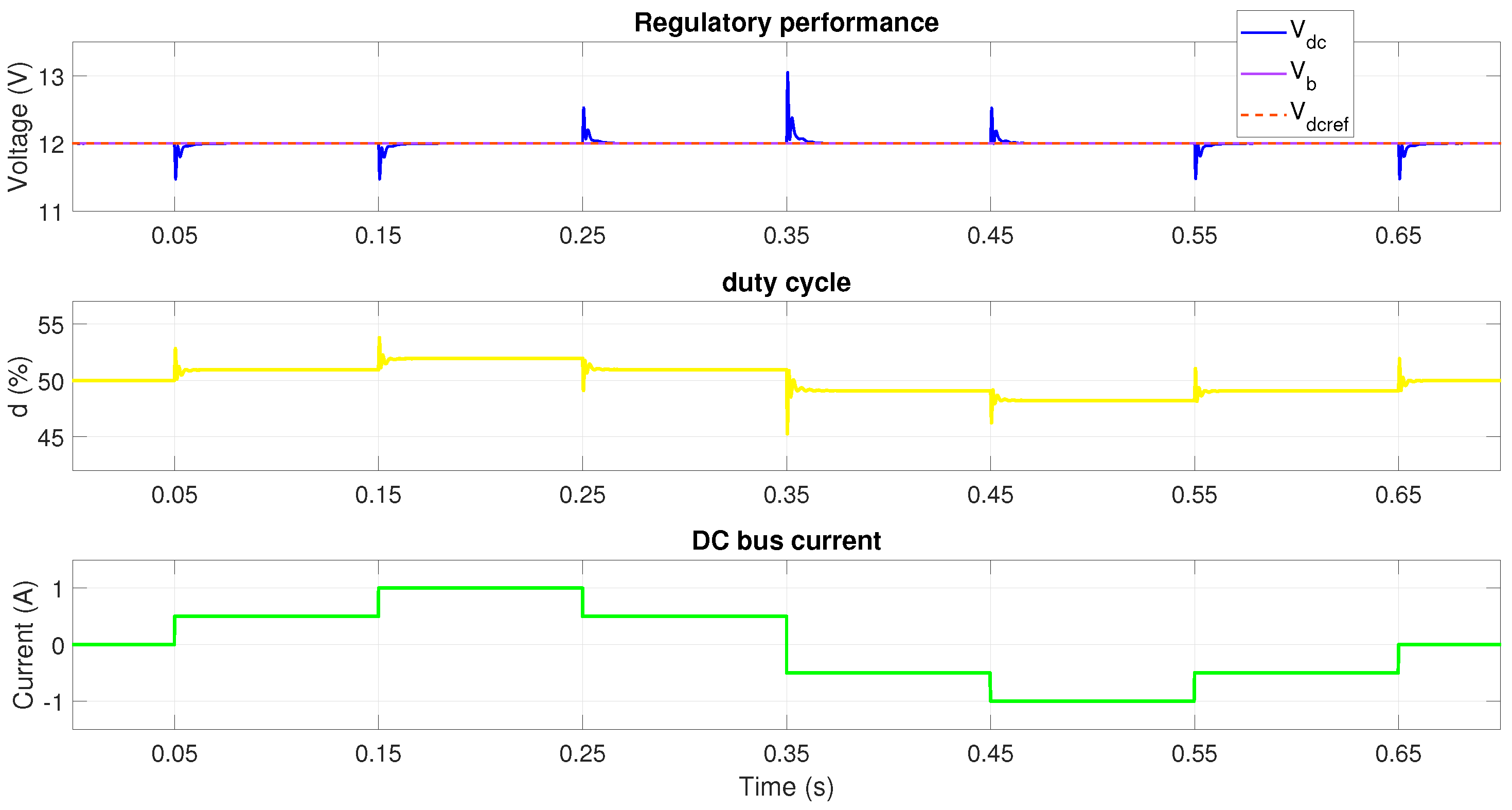
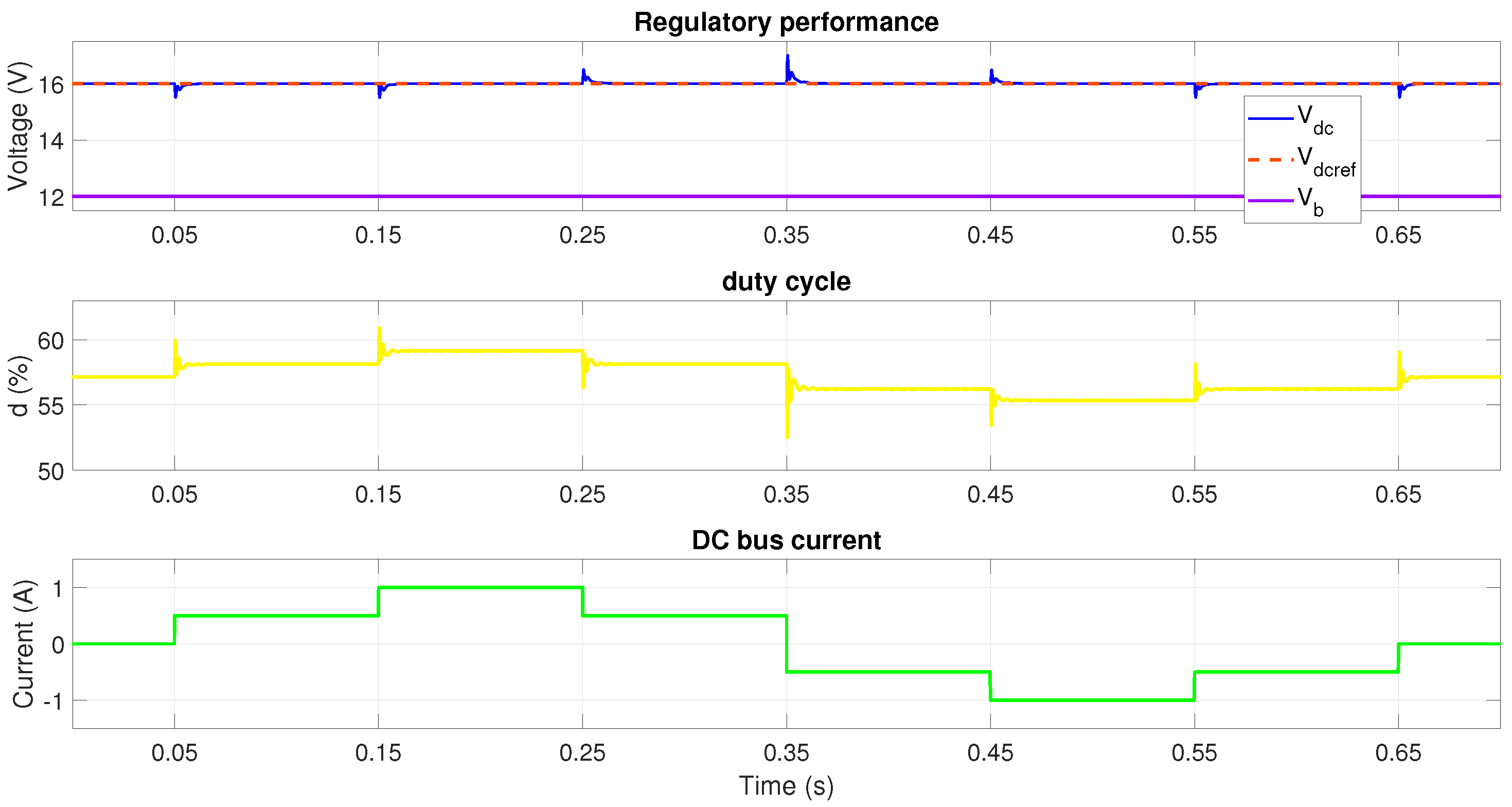
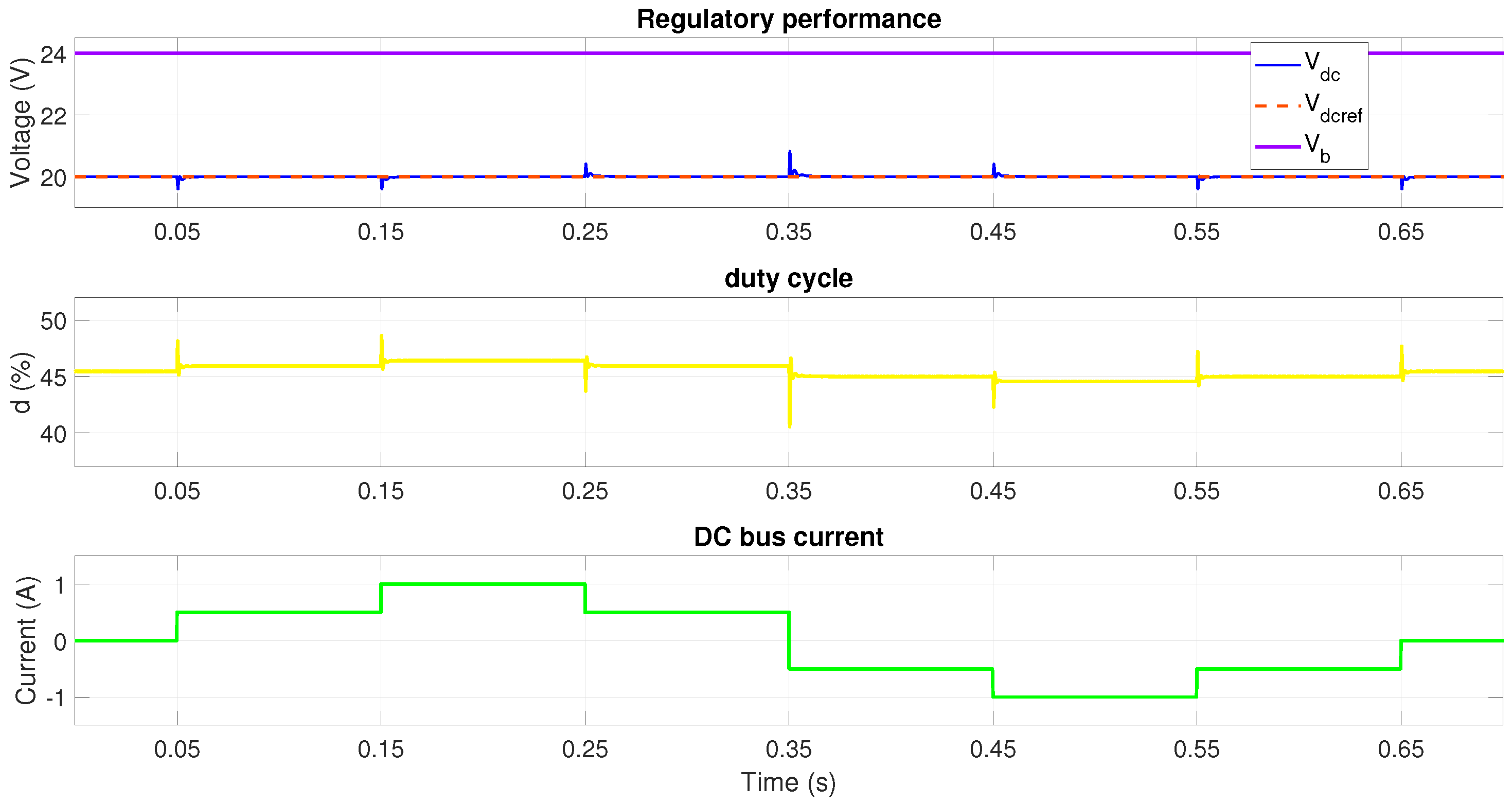
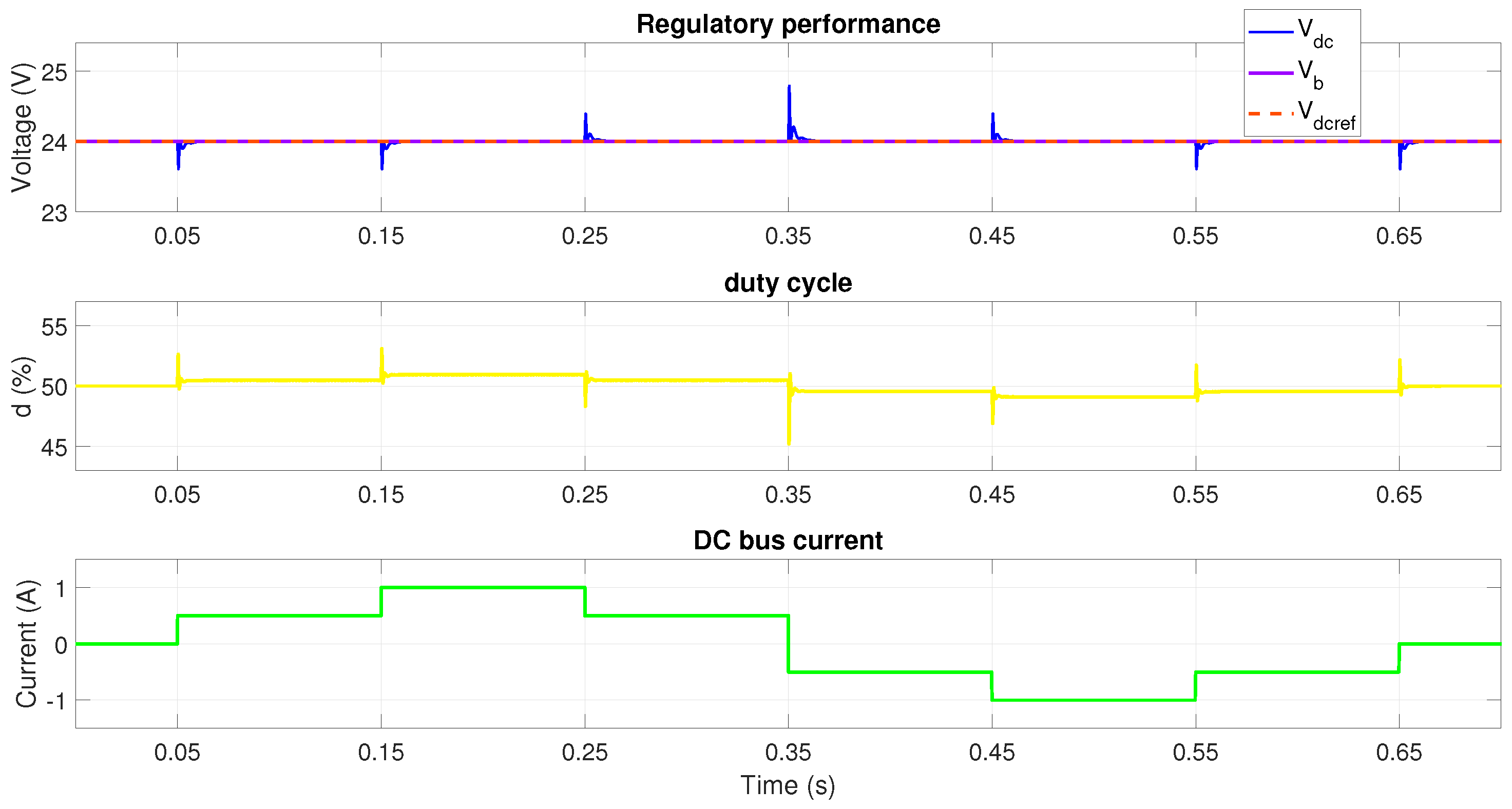
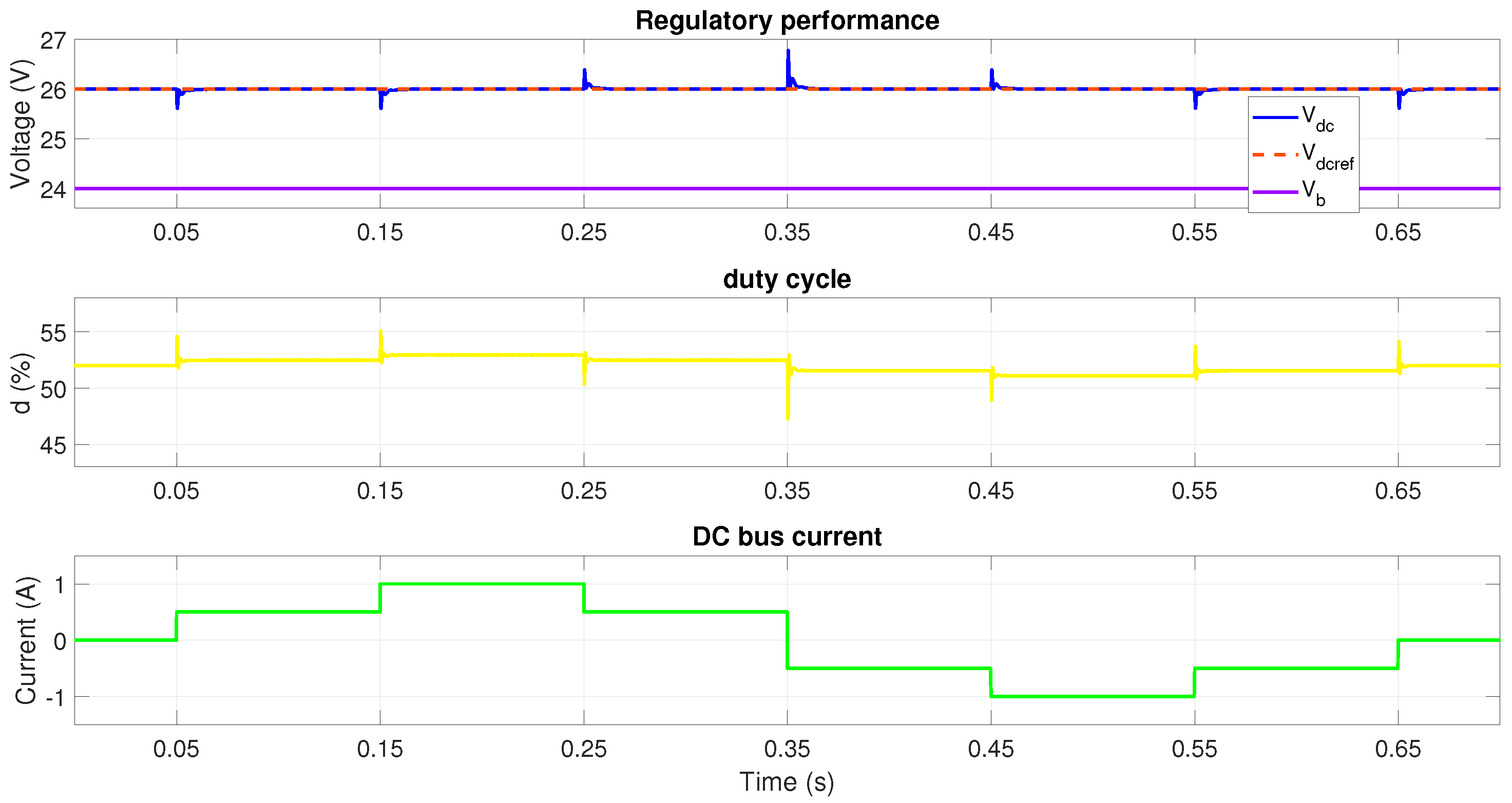
4.1. Simulations Results for Bus Voltage Regulation
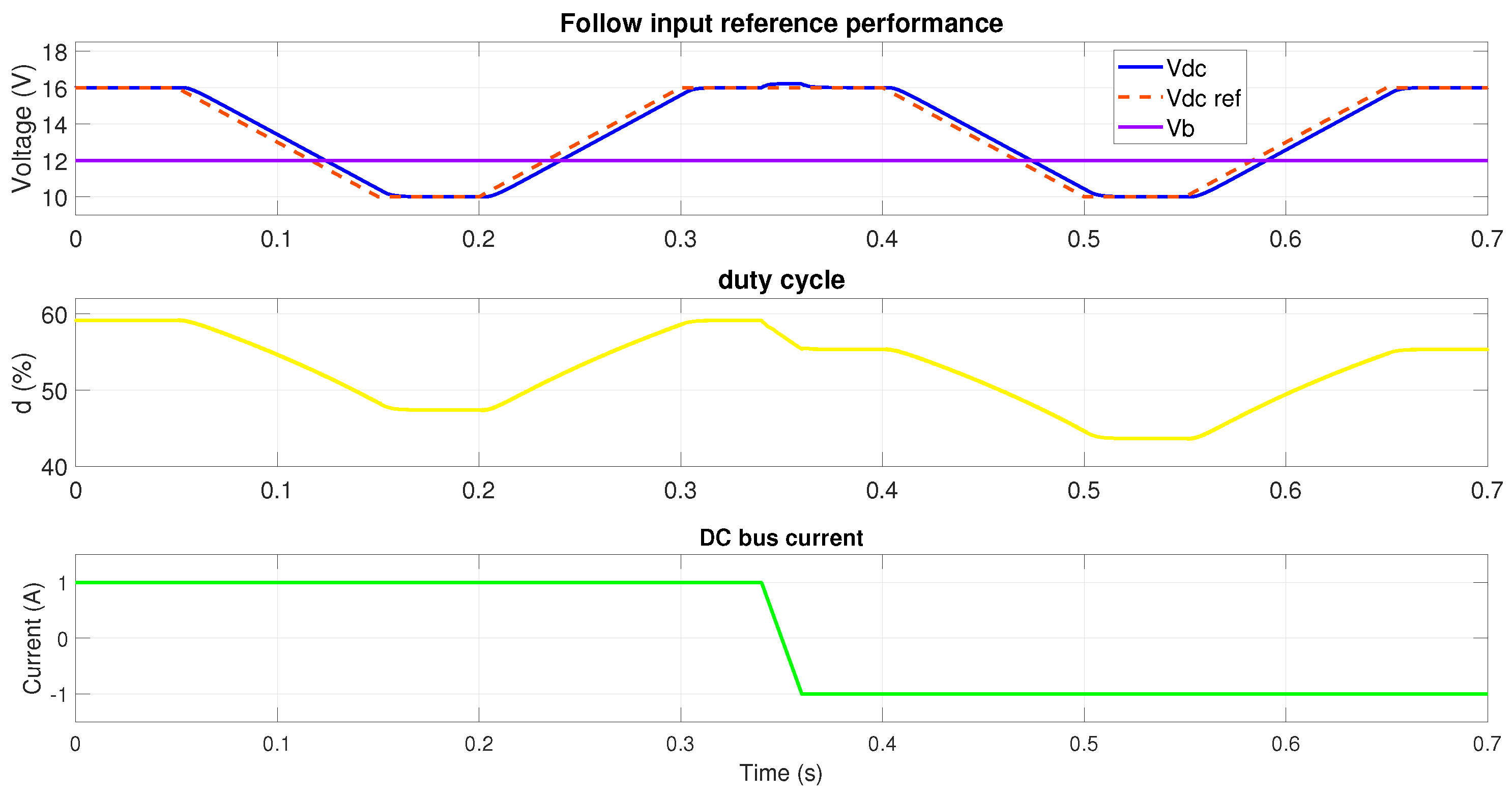
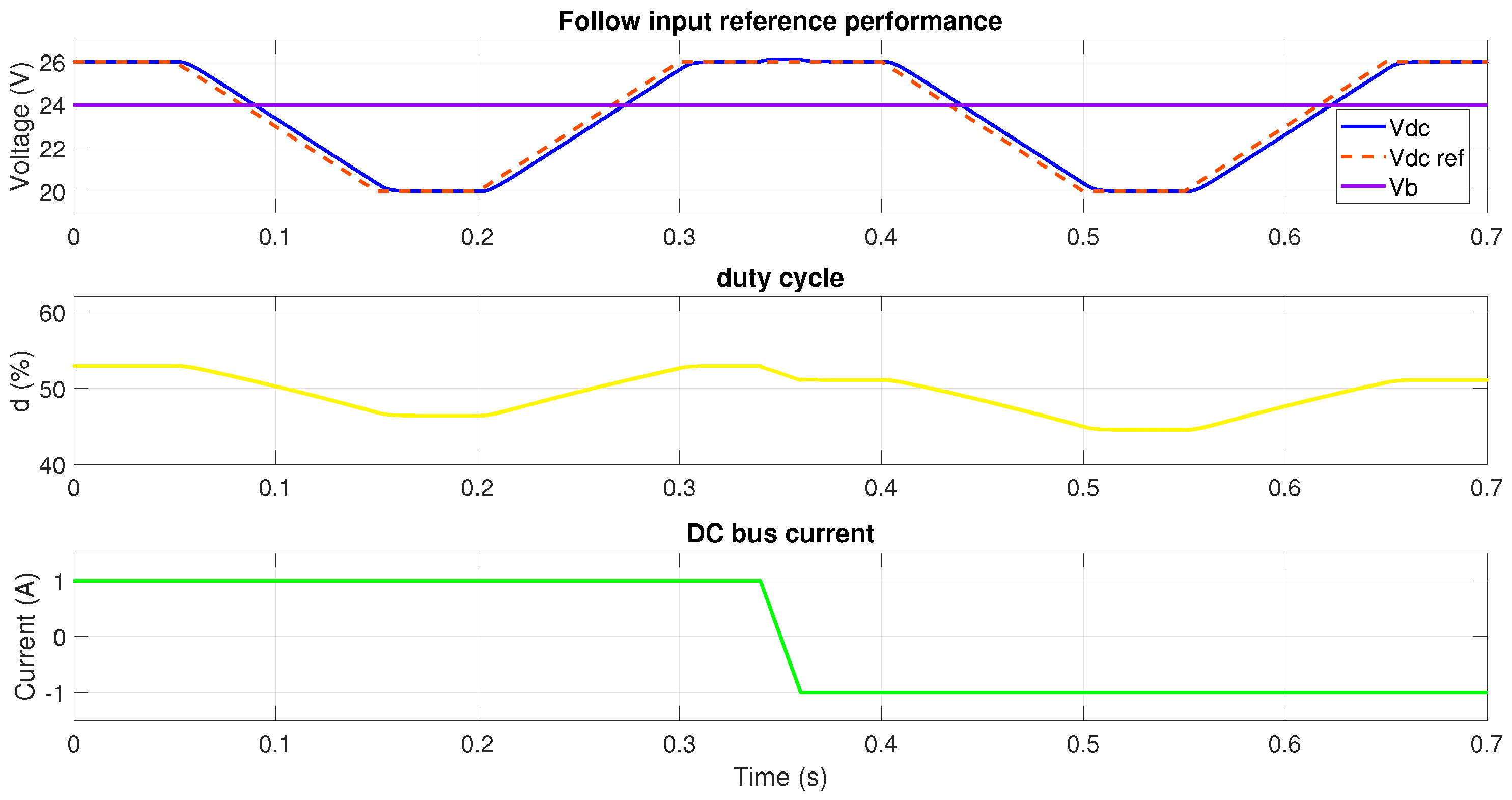
4.2. Simulations for Reference Tracking
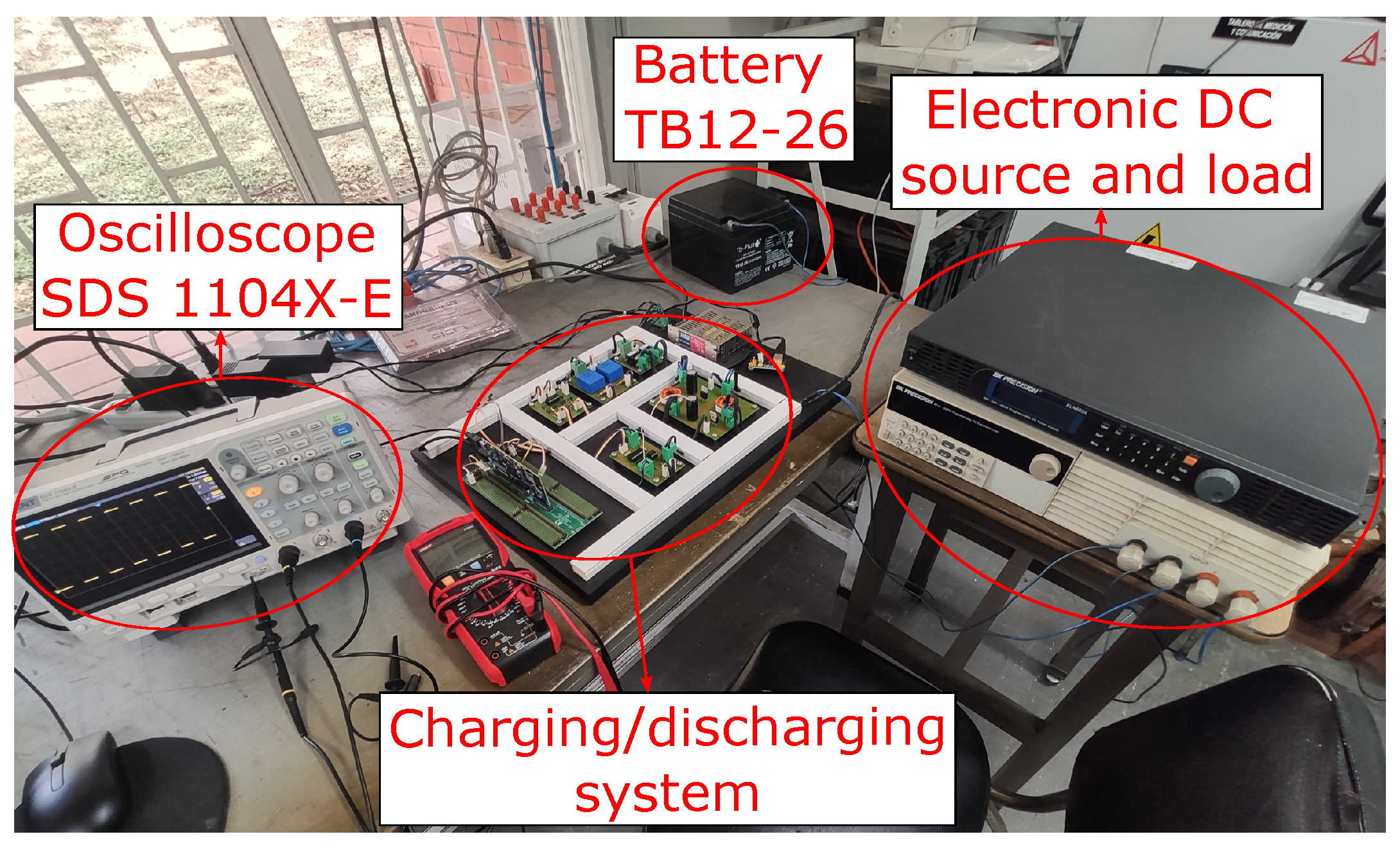
5. Experimental Validation
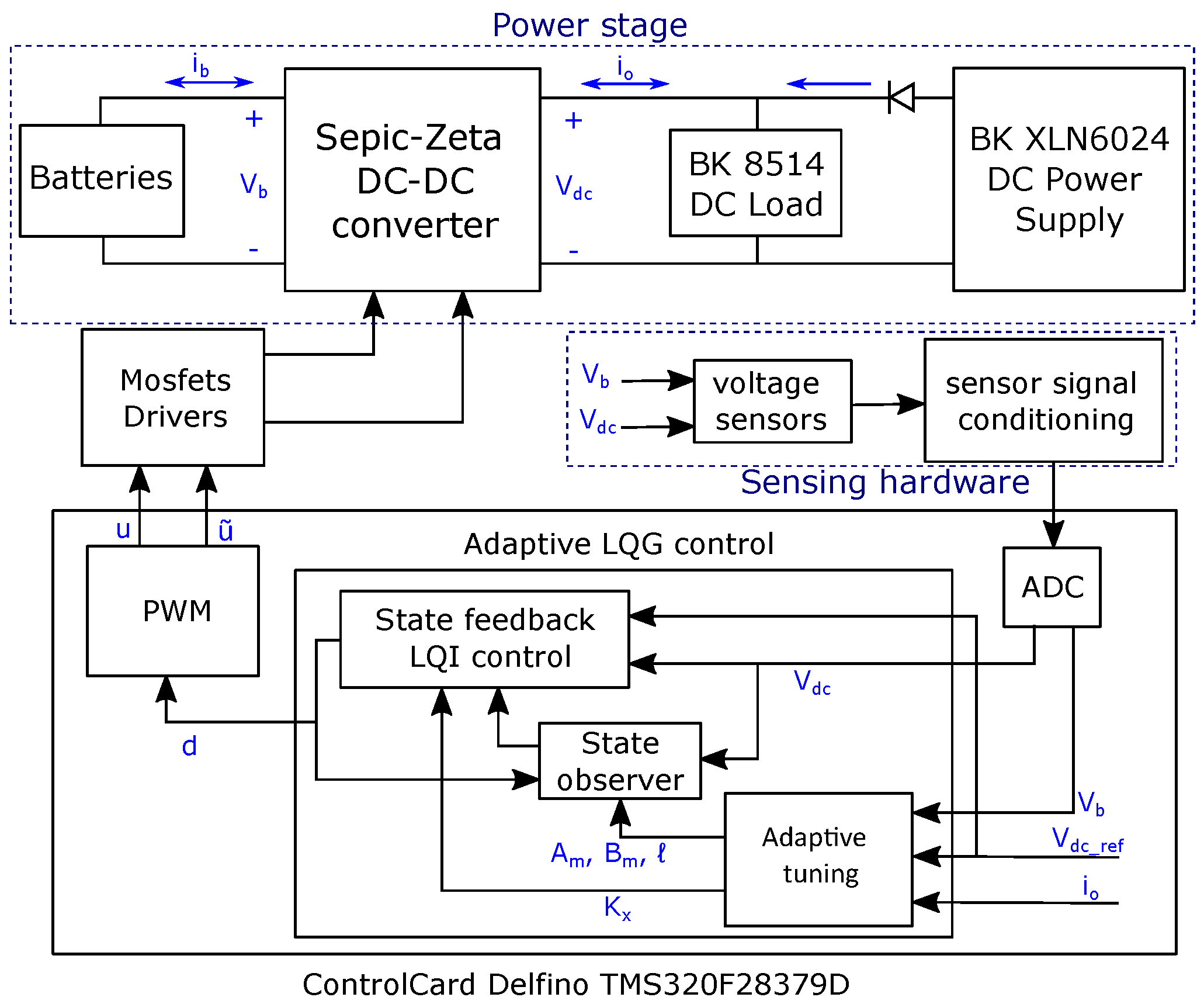
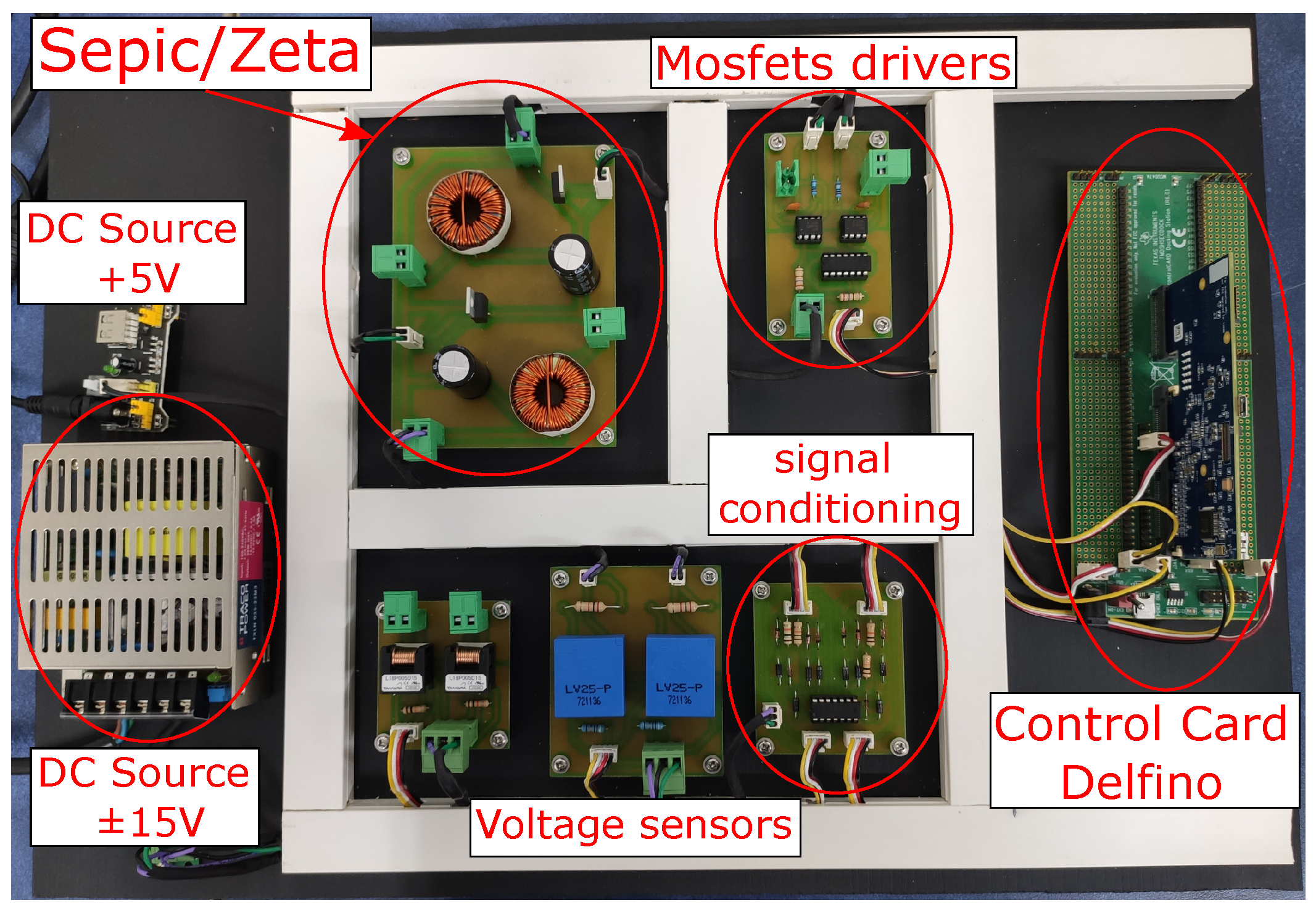
- Power stage: it consisted of a 12 V battery, the bidirectional Sepic/Zeta converter, and the DC bus. A connection of the commercial electronic load (BK 8514) and the commercial source (BK XLN6024), using rectifier diodes in parallel to avoid reverse currents, was used to emulate a controllable dc bus.
- Sensing hardware: LV25P voltage sensors were used to measure both the bus and battery voltages. The outputs of those sensors were isolated and scaled to the levels required by the control card.
- Control card: the Texas Instruments Delfino TMS320F28379D control card was used to implement the adaptive controller and state observer. This control card has a 32-bit double core processor of the C2000 series at 200 MHz, four analog-to-digital converters (ADC), three 12-bit buffered digital-to-analog (DAC) outputs, 24 pulse width modulator (PWM) channels, input/output digital signals, among other features. In this experimental validation, a PWM module was used to generate the gate signals of the MOSFETs M1 and M2, also introducing the dead time required between both MOSFETs according to the datasheet. The control signal d was extracted from the control card using a DAC channel, for monitoring purposes, and the and values were acquired using two ADC channels. In terms of software, the adaptive controller was implemented using the Embedded Coder Support Package for Texas Instruments C2000 Processor available in Matlab, which allowed us to generate C code from a Simulink model.
- MOSFET drivers: two opto-coupled HCPL 3120 drivers were used to generate the isolated gate voltages for each MOSFET.
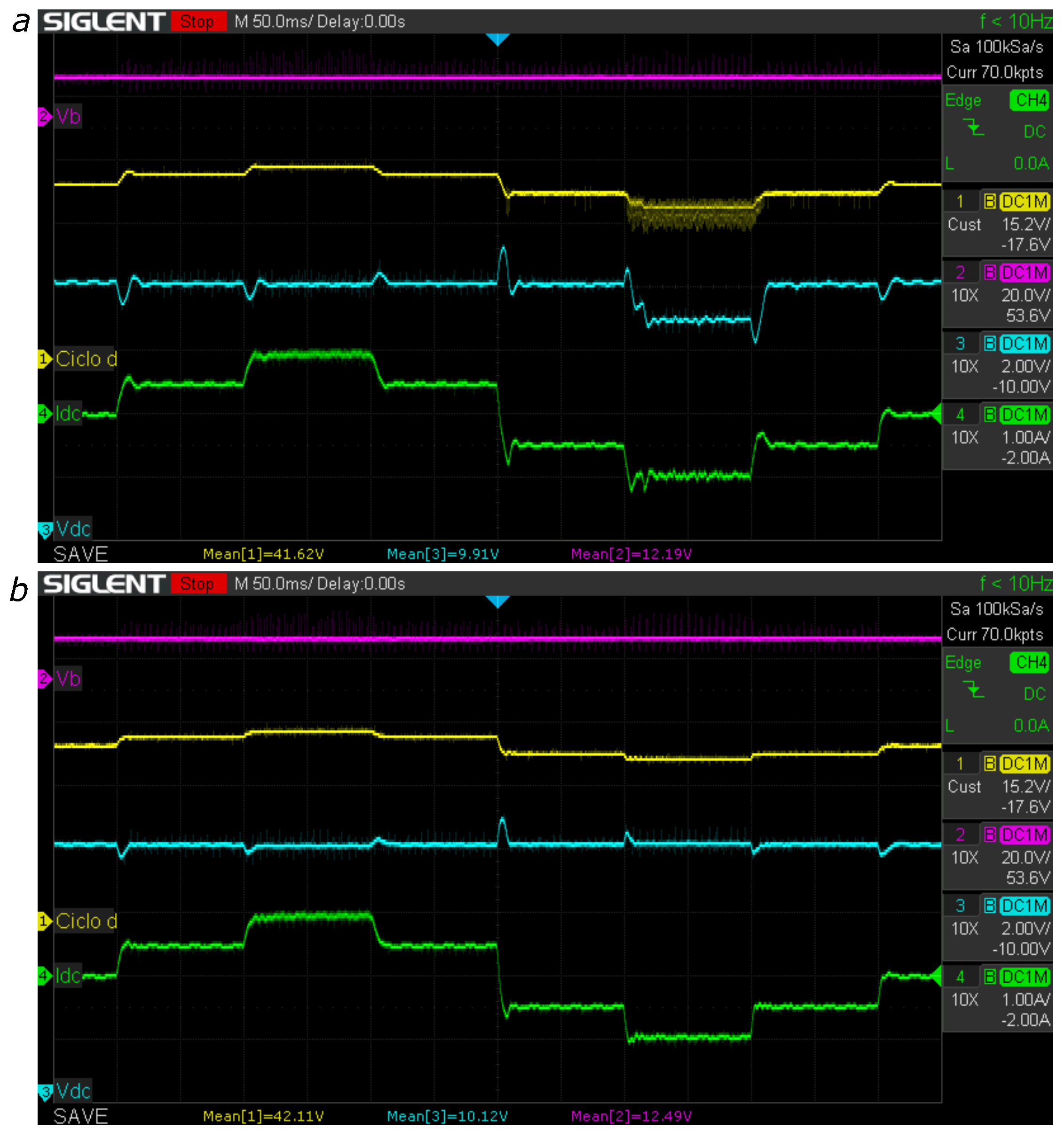
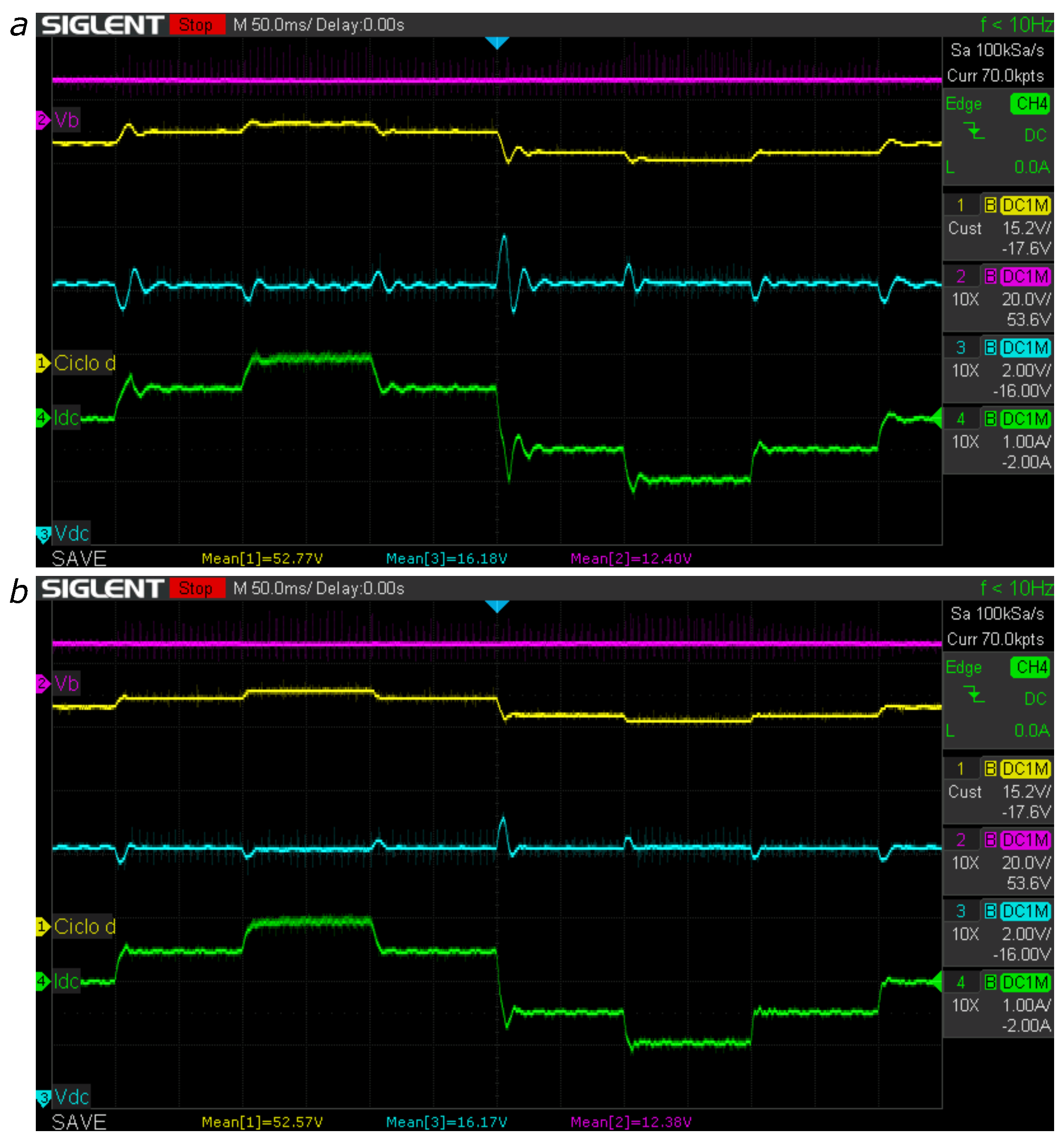
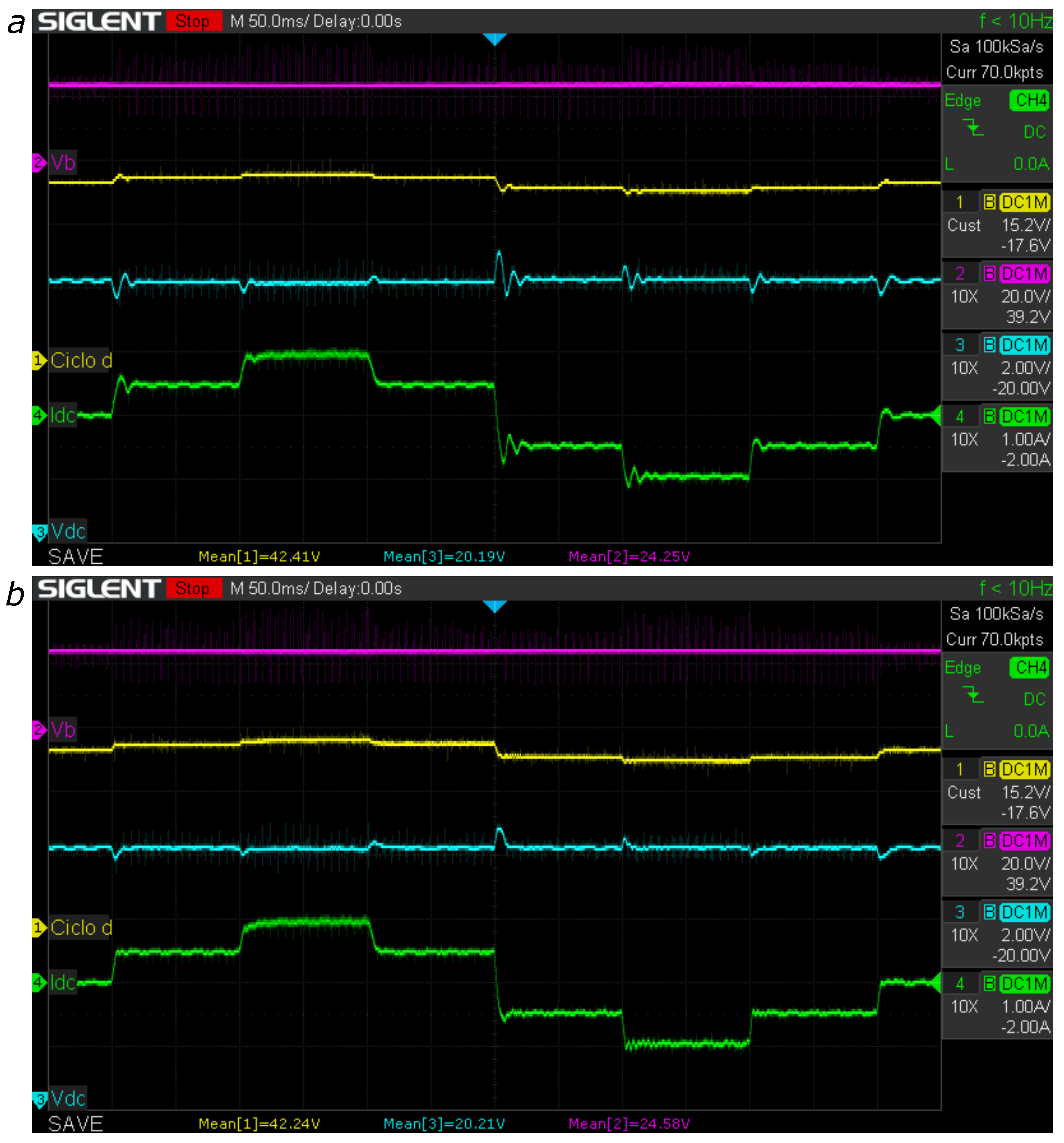
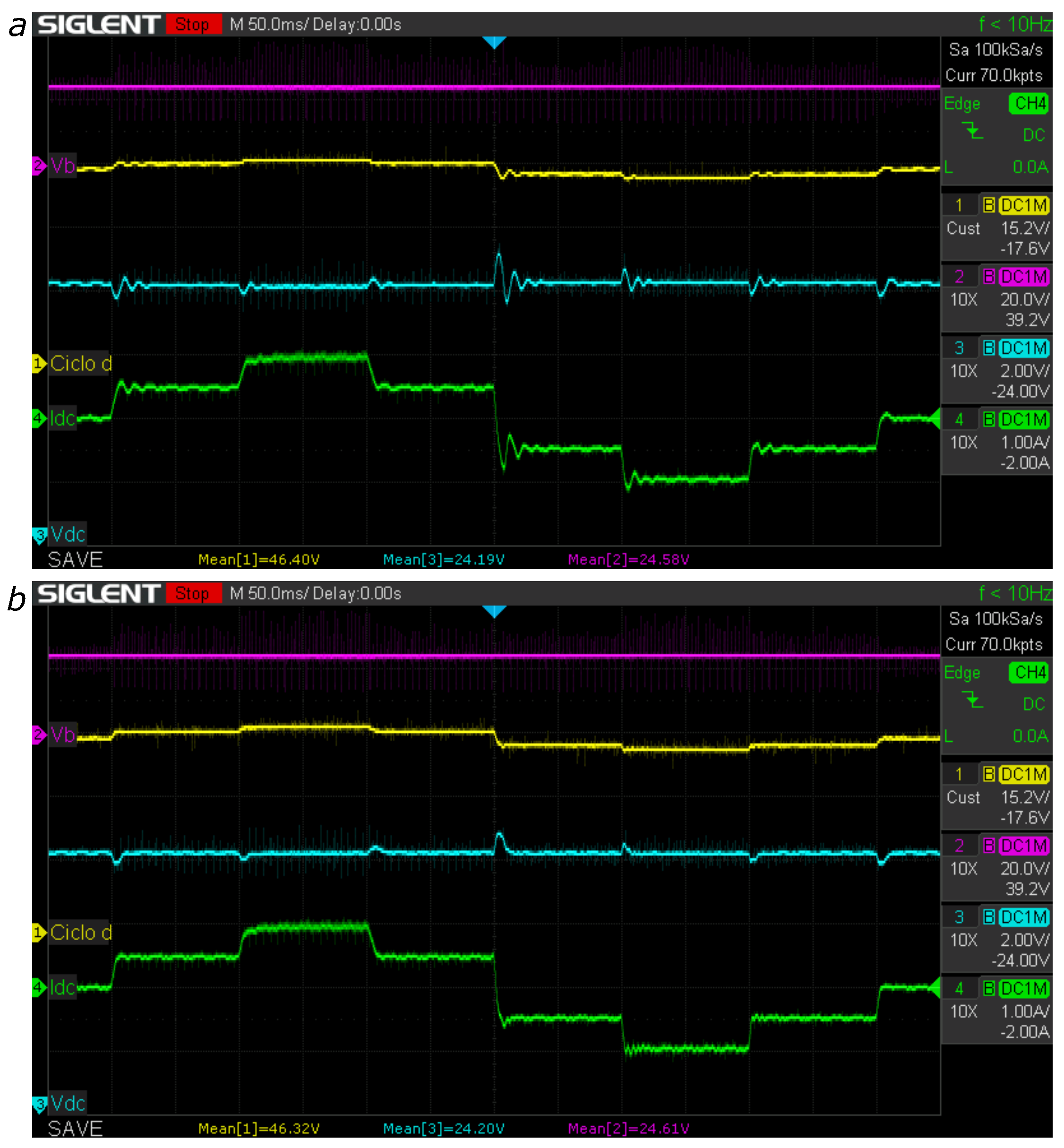
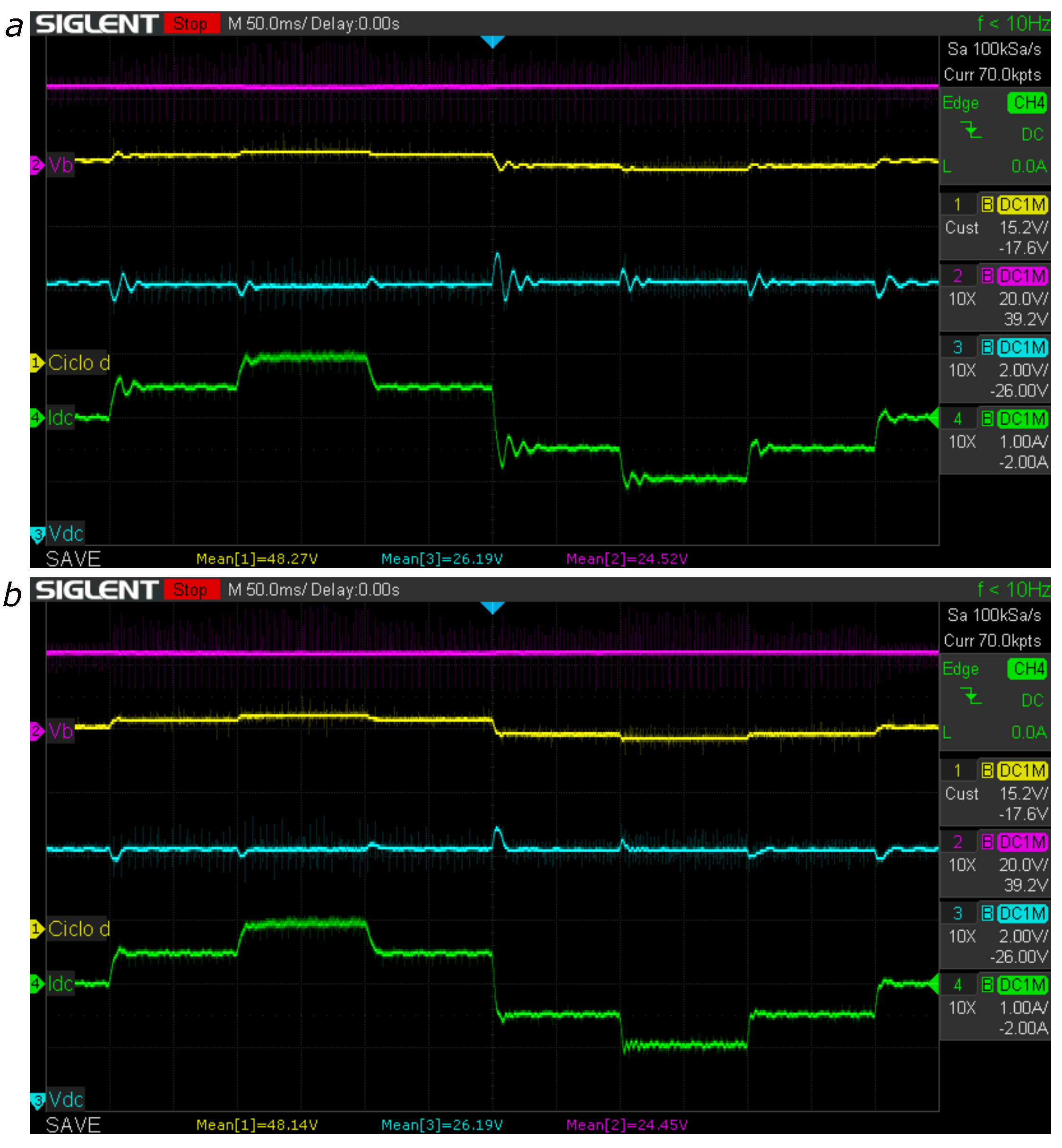
5.1. Experimental Results for Bus Voltage Regulation
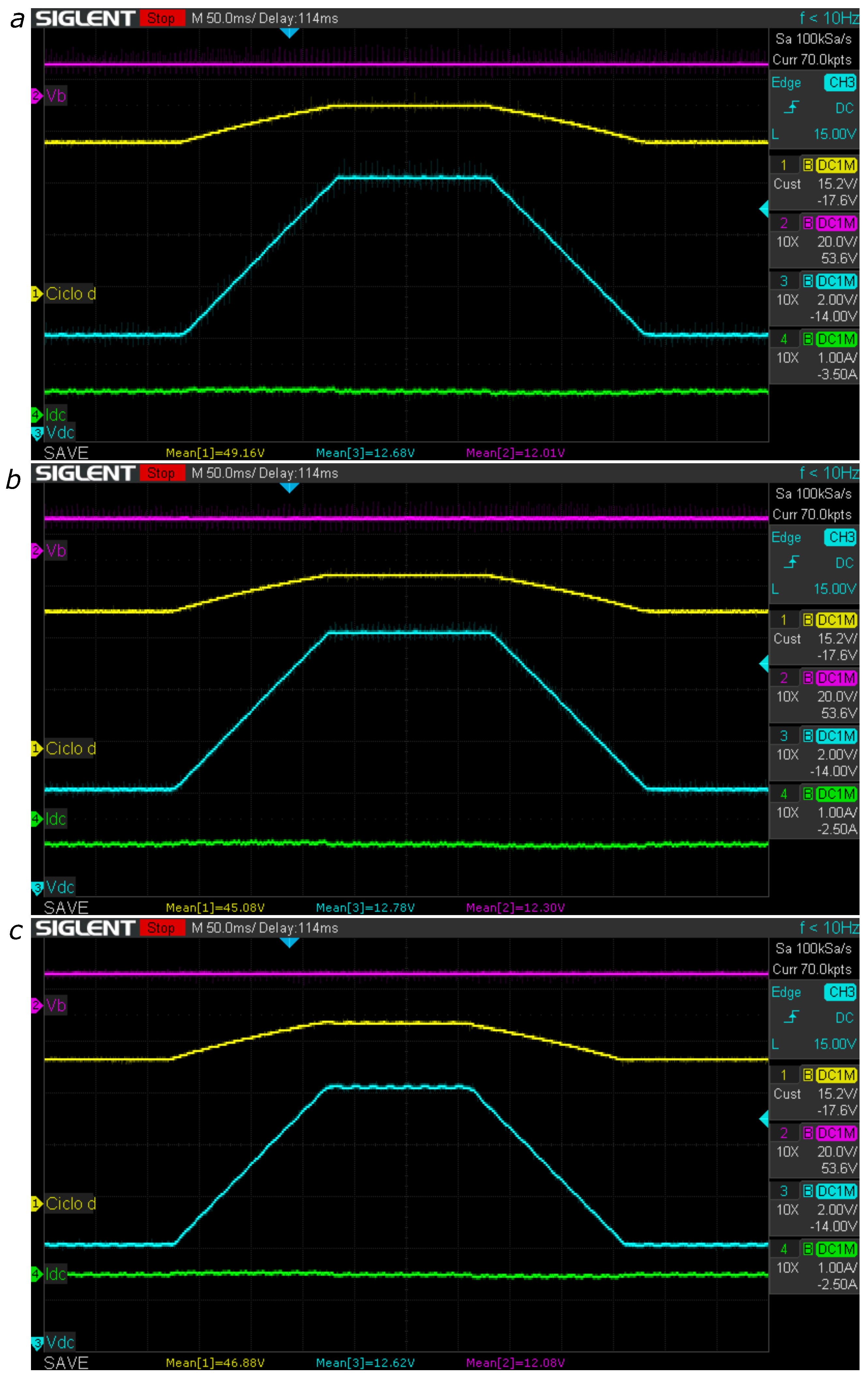
5.2. Experimental Results for Reference Tracking
- The proposed adaptive LQI controller was able to adjust the parameters to ensure global stability and the desired performance under any operation conditions of the battery (charge, discharge, stand-by) and the converter (buck, boost, unitary gain).
- The experiments and simulation fulfilled the design criteria, hence the design procedure proposed in this paper was correct. Moreover, this also confirmed the validity of the mathematical model developed for control purposes.
- It was possible to implement the proposed adaptive LQI controller using commercial devices, which ensured the commercial viability of the proposed solution.
- The proposed controller provided a better performance in comparison with classical solutions such as PI controllers, which were not able to ensure global stability.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bandara, G.; Rajakaruna, S.; Ghosh, A. Evaluating of Frequency Response Time Characteristics of Large Scale Energy Storage Systems in High Renewable Energy Penetrated Power Systems. In Proceedings of the 2021 31st Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 26–30 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Lawder, M.T.; Suthar, B.; Northrop, P.W.C.; De, S.; Hoff, C.M.; Leitermann, O.; Crow, M.L.; Santhanagopalan, S.; Subramanian, V.R. Battery Energy Storage System (BESS) and Battery Management System (BMS) for Grid-Scale Applications. Proc. IEEE 2014, 102, 1014–1030. [Google Scholar] [CrossRef]
- Evans, A.; Strezov, V.; Evans, T.J. Assessment of utility energy storage options for increased renewable energy penetration. Renew. Sustain. Energy Rev. 2012, 16, 4141–4147. [Google Scholar] [CrossRef]
- Divya, K.; Østergaard, J. Battery energy storage technology for power systems—An overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]
- Rey, J.M.; Vera, G.A.; Acevedo-Rueda, P.; Solano, J.; Mantilla, M.A.; Llanos, J.; Sáez, D. A Review of Microgrids in Latin America: Laboratories and Test Systems. IEEE Lat. Am. Trans. 2022, 20, 1000–1011. [Google Scholar] [CrossRef]
- Zarate-Perez, E.; Rosales-Asensio, E.; González-Martínez, A.; de Simón-Martín, M.; Colmenar-Santos, A. Battery energy storage performance in microgrids: A scientific mapping perspective. Energy Rep. 2022, 8, 259–268. [Google Scholar] [CrossRef]
- Al-Obaidi, N.A.; Abbas, R.A.; Khazaal, H.F. A Review of Non-Isolated Bidirectional DC-DC Converters for Hybrid Energy Storage System. In Proceedings of the 2022 5th International Conference on Engineering Technology and Its Applications (IICETA), Al-Najaf, Iraq, 31 May 2022–1 June 2022; pp. 248–253. [Google Scholar] [CrossRef]
- Gorji, S.A.; Sahebi, H.G.; Ektesabi, M.; Rad, A.B. Topologies and Control Schemes of Bidirectional DC–DC Power Converters: An Overview. IEEE Access 2019, 7, 117997–118019. [Google Scholar] [CrossRef]
- Matsuo, H.; Kurokawa, F. New Solar Cell Power Supply System Using a Boost Type Bidirectinal DC-DC Converter. IEEE Trans. Ind. Electron. 1984, IE-31, 51–55. [Google Scholar] [CrossRef]
- Serna-Garcès, S.I. Contributions to the Efficiency and Safety of Stand-Alone DC Microgrids. Ph.D. Thesis, Universidad Nacional de Colombia, Manizales, CO, USA, 2018. Available online: https://repositorio.unal.edu.co/handle/unal/69113 (accessed on 15 December 2022).
- Pegueroles-Queralt, J.; Bianchi, F.D.; Gomis-Bellmunt, O. Control of a lithium-ion battery storage system for microgrid applications. J. Power Sources 2014, 272, 531–540. [Google Scholar] [CrossRef]
- Caricchi, F.; Crescimbini, F.; Noia, G.; Pirolo, D. Experimental study of a bidirectional DC-DC converter for the DC link voltage control and the regenerative braking in PM motor drives devoted to electrical vehicles. In Proceedings of the 1994 IEEE Applied Power Electronics Conference and Exposition—ASPEC’94, Orlando, FL, USA, 13–17 February 1994; pp. 381–386. [Google Scholar] [CrossRef]
- He, T.; Wu, M.; Lu, D.D.C.; Aguilera, R.P.; Zhang, J.; Zhu, J. Designed Dynamic Reference with Model Predictive Control for Bidirectional EV Chargers. IEEE Access 2019, 7, 129362–129375. [Google Scholar] [CrossRef]
- Song, Z.; Hou, J.; Hofmann, H.; Li, J.; Ouyang, M. Sliding-mode and Lyapunov function-based control for battery/supercapacitor hybrid energy storage system used in electric vehicles. Energy 2017, 122, 601–612. [Google Scholar] [CrossRef]
- Canciello, G.; Cavallo, A.; Guida, B. Control of Energy Storage Systems for Aeronautic Applications. J. Control Sci. Eng. 2017, 2017, 2458590. [Google Scholar] [CrossRef]
- Russo, A.; Cavallo, A. Supercapacitor stability and control for More Electric Aircraft application. In Proceedings of the 2020 European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020; pp. 1909–1914. [Google Scholar] [CrossRef]
- Cavallo, A.; Canciello, G.; Russo, A. Integrated supervised adaptive control for the more Electric Aircraft. Automatica 2020, 117, 108956. [Google Scholar] [CrossRef]
- Canciello, G.; Cavallo, A.; Schiavo, A.L.; Russo, A. Multi-objective adaptive sliding manifold control for More Electric Aircraft. ISA Trans. 2020, 107, 316–328. [Google Scholar] [CrossRef] [PubMed]
- Cavallo, A.; Russo, A.; Canciello, G. Hierarchical control for generator and battery in the more electric aircraft. Sci. China Inf. Sci. 2019, 62, 192207. [Google Scholar] [CrossRef]
- Canciello, G.; Russo, A.; Guida, B.; Cavallo, A. Supervisory Control for Energy Storage System Onboard Aircraft. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Cavallo, A.; Canciello, G.; Russo, A. Supervised Energy Management in Advanced Aircraft Applications. In Proceedings of the 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 2769–2774. [Google Scholar] [CrossRef]
- Cavallo, A.; Canciello, G.; Guida, B. Supervisory control of DC-DC bidirectional converter for advanced aeronautic applications. Int. J. Robust Nonlinear Control. 2018, 28, 1–15. [Google Scholar] [CrossRef]
- Adam, K.B.; Ashari, M. Design of bidirectional converter using fuzzy logic controller to optimize battery performance in Electric Vehicle. In Proceedings of the 2015 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 20–21 May 2015; pp. 201–206. [Google Scholar] [CrossRef]
- Lee, H.S.; Yun, J.J. High-Efficiency Bidirectional Buck–Boost Converter for Photovoltaic and Energy Storage Systems in a Smart Grid. IEEE Trans. Power Electron. 2019, 34, 4316–4328. [Google Scholar] [CrossRef]
- Schuch, L.; Rech, C.; Hey, H.; Grundlinggrundling, H.; Pinheiro, H.; Pinheiro, J. Analysis and Design of a New High-Efficiency Bidirectional Integrated ZVT PWM Converter for DC-Bus and Battery-Bank Interface. IEEE Trans. Ind. Appl. 2006, 42, 1321–1332. [Google Scholar] [CrossRef]
- Schuch, L.; Rech, C.; Hey, H.; Pinheiro, J. Integrated ZVT Auxiliary Commutation Circuit for Input Stage of Double-Conversion UPSs. IEEE Trans. Power Electron. 2004, 19, 1486–1497. [Google Scholar] [CrossRef]
- Suryoatmojo, H.; Ridwan, M.; Izzatur-Rahman, I.; Candra-Riawan, D.; Ashari, M. Design of Bidirectional DC-DC Cuk Converter for Testing Characteristics of Lead-Acid Battery. Prz. Elektrotechniczny 2020, 2020, 114–118. [Google Scholar] [CrossRef]
- Middlebrook, R.; Cuk, S.; Behen, W. A new battery charger/discharger converter. In Proceedings of the 1978 IEEE Power Electronics Specialists Conference, Syracuse, NY, USA, 13–15 June 1978; pp. 251–255. [Google Scholar] [CrossRef]
- Bhattacharya, T.; Giri, V.; Mathew, K.; Umanand, L. Multiphase Bidirectional Flyback Converter Topology for Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2009, 56, 78–84. [Google Scholar] [CrossRef]
- Chao, P.C.P.; Chen, W.B.; Wu, R.H. A battery charge controller realized by a flyback converter with digital primary side regulation for mobile phones. Microsyst. Technol. 2014, 20, 1689–1703. [Google Scholar] [CrossRef]
- Xiong, H.; Song, D.; Shi, F.; Wei, Y.; Jinzhen, L. Novel voltage equalisation circuit of the lithium battery pack based on bidirectional flyback converter. IET Power Electron. 2020, 13, 2194–2200. [Google Scholar] [CrossRef]
- Kim, C.H.; Kim, M.Y.; Moon, G.W. Individual cell equalizer using active-clamp flyback converter for li-ion battery strings in an electric vehicle. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, Republic of Korea, 9–12 October 2012; pp. 327–332. [Google Scholar] [CrossRef]
- Henao-Bravo, E.E.; Saavedra-Montes, A.J.; Ramos-Paja, C.A.; Bastidas-Rodriguez, J.D.; Gonzalez Montoya, D. Charging/discharging system based on zeta/sepic converter and a sliding mode controller for dc bus voltage regulation. IET Power Electron. 2020, 13, 1514–1527. [Google Scholar] [CrossRef]
- Gayen, P.K.; Roy Chowdhury, P.; Dhara, P.K. An improved dynamic performance of bidirectional SEPIC-Zeta converter based battery energy storage system using adaptive sliding mode control technique. Electr. Power Syst. Res. 2018, 160, 348–361. [Google Scholar] [CrossRef]
- Singh, A.K.; Pathak, M.K. Single-stage ZETA-SEPIC-based multifunctional integrated converter for plug-in electric vehicles. IET Electr. Syst. Transp. 2018, 8, 101–111. [Google Scholar] [CrossRef]
- Bhandari, A.S.; Bose, S.; Dwivedi, P. Enhanced Dynamic Characteristics Of Bidirectional DC-DC SEPIC/ZETA Converter Based BESS. In Proceedings of the 2022 2nd International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), Patna, India, 24–25 June 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Song, M.S.; Son, Y.D.; Lee, K.H. Non-isolated Bidirectional Soft-switching SEPIC/ZETA Converter with Reduced Ripple Currents. J. Power Electron. 2014, 14, 649–660. [Google Scholar] [CrossRef]
- Kim, I.D.; Paeng, S.H.; Ahn, J.W.; Nho, E.C.; Ko, J.S. New Bidirectional ZVS PWM Sepic/Zeta DC-DC Converter. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 555–560. [Google Scholar] [CrossRef]
- Sebaje, A.S.; da Silva Martins, M.L.; Illa Font, C.H. A Hybrid Bidirectional DC-DC Converter Based on a SEPIC/Zeta Converter with a Modified Switched Capacitor Cell. In Proceedings of the 2021 Brazilian Power Electronics Conference (COBEP), João Pessoa, Brazil, 7–10 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Agrawal, N.; Samanta, S.; Ghosh, S. Modified LQR Technique for Fuel-Cell-Integrated Boost Converter. IEEE Trans. Ind. Electron. 2021, 68, 5887–5896. [Google Scholar] [CrossRef]
- Al Hassan, H.A.; Alharbi, T.; Morello, S.A.; Mao, Z.H.; Grainger, B.M. Linear Quadratic Integral Voltage Control of Islanded AC Microgrid under Large Load Changes. In Proceedings of the 2018 9th IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Charlotte, NC, USA, 25–28 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Hwang, C.K.; Huang, K.S.; Lin, K.B.; Lee, B.K. Observer base linear quadratic regulation with estimated state feedback control. In Proceedings of the 2010 International Conference on Machine Learning and Cybernetics, Qingdao, China, 11–14 July 2010; Volume 6, pp. 2802–2805. [Google Scholar] [CrossRef]
- The Analytic Sciences Corporation. Applied Optimal Estimation; Gelb, A., Ed.; MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Brogan, W.L. Modern Control Theory, 3rd ed.; Prentice-Hall: London, UK, 1990. [Google Scholar]
- Dorato, P.; Cerone, V.; Abdallah, C. Linear-Quadratic Control: An Introduction; Simon & Schuster, Inc.: New York, NY, USA, 1994. [Google Scholar]
- MATLAB, version 9.12.0.188 (R2022a); The MathWorks Inc.: Natick, MA, USA, 2022.
- The MathWorks Inc. Specialized Power Systems; The MathWorks Inc.: Natick, MA, USA, 2022. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 10–26 V | |
| 10–26 V | |
| F | 40 kHz |
| [−1, 1] A | |
| 90% | |
| 20% | |
| 1% |
| Parameter | Ref | Values |
|---|---|---|
| IRF3710 | , , | |
| 2322-RC | , | |
| 2322-RC | , | |
| UEP1J331MHD | , | |
| UEP1J331MHD | , |
| Test Conditions | Overshoot (%) | Settling Time (ms) | |
|---|---|---|---|
| 12 | 10 | 9.7 | 3.83 |
| 12 | 8.75 | 3.46 | |
| 16 | 6.19 | 3.02 | |
| 24 | 20 | 4.1 | 0.75 |
| 24 | 3.29 | 0.67 | |
| 26 | 3 | 0.63 | |
| Test | Overshoot (%) | Settling Time (ms) | |||
|---|---|---|---|---|---|
| PI | Adaptive LQI | PI | Adaptive LQI | ||
| 12 | 10 | 12 | 8.75 | 13.2 | 9 |
| 12 | 9 | 7 | 18 | 8.8 | |
| 16 | 9.49 | 5.85 | 24.2 | 8.7 | |
| 24 | 20 | 4.67 | 3.16 | 10.55 | 7.22 |
| 24 | 4.09 | 2.63 | 11.33 | 7.46 | |
| 26 | 3.63 | 2.63 | 7.1 | 7.17 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montenegro-Oviedo, J.A.; Ramos-Paja, C.A.; Orozco-Gutierrez, M.L.; Franco-Mejía, E.; Serna-Garcés, S.I. Adaptive Controller for Bus Voltage Regulation on a DC Microgrid Using a Sepic/Zeta Battery Charger/Discharger. Mathematics 2023, 11, 793. https://doi.org/10.3390/math11040793
Montenegro-Oviedo JA, Ramos-Paja CA, Orozco-Gutierrez ML, Franco-Mejía E, Serna-Garcés SI. Adaptive Controller for Bus Voltage Regulation on a DC Microgrid Using a Sepic/Zeta Battery Charger/Discharger. Mathematics. 2023; 11(4):793. https://doi.org/10.3390/math11040793
Chicago/Turabian StyleMontenegro-Oviedo, Jhoan Alejandro, Carlos Andres Ramos-Paja, Martha Lucia Orozco-Gutierrez, Edinson Franco-Mejía, and Sergio Ignacio Serna-Garcés. 2023. "Adaptive Controller for Bus Voltage Regulation on a DC Microgrid Using a Sepic/Zeta Battery Charger/Discharger" Mathematics 11, no. 4: 793. https://doi.org/10.3390/math11040793
APA StyleMontenegro-Oviedo, J. A., Ramos-Paja, C. A., Orozco-Gutierrez, M. L., Franco-Mejía, E., & Serna-Garcés, S. I. (2023). Adaptive Controller for Bus Voltage Regulation on a DC Microgrid Using a Sepic/Zeta Battery Charger/Discharger. Mathematics, 11(4), 793. https://doi.org/10.3390/math11040793