Abstract
The global control problem of high-order nonlinear systems with unknown odd rational powers and nonlinearities has been solved in this paper for the first time. Barrier functions were introduced into the controller to set the controller free from rational powers, which solved the problem caused by unknown odd rational powers. In utilizing barrier functions and their inverse functions, two transformations were constructed for the state and tracking errors, which resulted in the global tracking controller for the high-order odd-rational-powers nonlinear systems with unknown system nonlinearities. No knowledge of system nonlinearities and odd rational powers is required to construct the controller in this paper, and only control gains are assumed to be positive to guarantee the controllability of the system, which implies that the proposed method is model-free and has much more relaxed conditions than all the existing methods for high-order nonlinear systems. The global boundedness of all closed-loop signals was proved based on the Lyapunov stability theorem. Finally, simulation results were given to demonstrate the effectiveness of the proposed method.
Keywords:
nonlinear systems; uncertain powers; global tracking control; high-order nonlinear systems MSC:
93C10
1. Introduction
Over the past several years, the control strategy for nonlinear systems with strict feedback has achieved considerable progress [1,2], whereas research into the control strategy for high-order nonlinear systems has been limited [3]. In actuality, the system degenerates into a strict feedback system when high-order nonlinear systems are under the condition that their powers are equal to one. Therefore, high-order nonlinear systems are more general than strict feedback nonlinear systems which have been investigated with many remarkable results. However, it is worth mentioning that control designs for high-order nonlinear systems are significant challenges since many typical nonlinear control techniques that have been commonly used in strict feedback nonlinear systems cannot be applied to high-order nonlinear systems directly, as the linearization of high-order nonlinear systems is uncontrollable, which forces the commonly used control techniques, such as adaptive control, to be either approximation-based control or dynamic surface control and thus they cannot be applied directly. To solve the control problems of high-order nonlinear systems, a pioneer control method was proposed [3,4], which is the so-called adding a power integrator technique. This technique effectively solved the stabilization and practical tracking problems of high-order nonlinear systems. Based on this technique, numerous studies [5,6,7,8,9,10,11,12] have been carried out to solve different control problems for high-order nonlinear systems. Ref. [7] tackled the tracking control problem with unknown control directions; Ref. [9] designed an adaptive fuzzy control method with full-state constraints; Ref. [12] proposed an adaptive control method for high-order systems with unknown nonlinear functions. It should be noted that these approaches require the powers of the system to be known [5,6,7,8,9,10,11,12]. However, there are a lot of high-order nonlinear systems whose powers cannot be exactly known due to system uncertainties or unknown nonlinearities.
Combined with adding a power integrator technique, refs. [13,14] investigated the control problems of high-order nonlinear systems with uncertain powers; Ref. [15] designed an adaptive control method for high-order nonlinear systems with uncertain parameters and uncertain powers; Ref. [16] proposed a barrier functions-based controller with full-state constraints. Further research was made in [17] by taking time-delay systems into account. However, it was found that the upper bounds of the powers are required to be known [13,14,15,16,17]. To relax this restriction, a global switching adaptive control approach was designed for nonlinear systems with unknown powers in [18]. It should be noted that the powers are assumed to be positive odd integers in these methods [13,14,15,16,17,18], which cannot be applied to high-order nonlinear systems with odd rational powers [19].
To address the control problem in high-order nonlinear systems with odd rational powers, Ref. [20] designed an adaptive fuzzy control method to deal with unknown system nonlinearities, which only guarantees semi-global stability of the system; Ref. [21] designed an adaptive control method for uncertain high-order nonlinear systems in the presence of unmodeled dynamics; and Ref. [22] designed an adaptive control method for uncertain stochastic high-order nonlinear systems with time delays. More recently, a global finite-time control method has been proposed for high-order systems [23], and an adaptive neural control method has been designed for high-order systems with unknown systems nonlinearities [24]. However, the rational powers are required to be known in all the above methods [19,20,21,22,23,24]. Till now, the control problem of high-order nonlinear systems with unknown odd rational powers is still a great challenge that has not yet been solved. Furthermore, the global control problem of high-order nonlinear systems with unknown system nonlinearities remains an open problem.
Despite the aforementioned results containing several nonlinear characters and exhibiting good performances in terms of stability, most of those controllers are complex. In fact, a complex controller is not conducive to the operation of systems. To reduce the complexity of the controller, a low-complexity controller was proposed [25]. Subsequently, this method has been widely used in controller design [2,26,27]. In addition, it should be mentioned that the controller designed based on the barrier function is one of the important methods to achieve the desired control performance of the system. A few related studies are considered: an adaptive fuzzy control method based on an event-triggered for pure-feedback stochastic nonlinear systems with multiple constraints was proposed [28]; an adaptive controller was designed for pure-feedback with full-state constraints based on pure-feedback stochastic nonlinear systems without using approximator [29]; and Ref. [30] proposed an adaptive control method for strict-feedback nonlinear systems with time-varying input delay and full-state constraints, which guarantees that the closed-loop nonlinear system is semi-globally ultimately uniformly bounded. However, the process involves setting initial conditions, which is required in all those methods. To relax this restriction, Ref. [2] designed a controller that does not need to update the design parameters in accordance with different initial conditions by introducing an inverse tangent function to transform errors. Unfortunately, the control method is only applicable to strict feedback systems and cannot be applied to high-order systems directly.
Motived by the aforementioned discussions, a global control method for high-order nonlinear systems with unknown odd rational powers and unknown system nonlinearities is studied in this paper. The main contributions are summarized as follows.
- (1)
- The control problem of high-order nonlinear systems with unknown odd rational powers is solved first. The designed controller does not require any knowledge of the odd rational powers.
- (2)
- By introducing a novel transformation for the state and tracking errors, a global controller is proposed for high-order nonlinear systems with unknown odd rational powers, allowing the system nonlinearities to be unknown.
- (3)
- The global boundedness of all closed-system signals is proved by the Lyapunov stability theorem, and simulation results are given to demonstrate the effectiveness of the proposed method.
2. Problem Statement and Preliminaries
Consider a class of high-order odd-rational-powers systems with unknown nonlinearities and powers as follows:
where denotes the available state vector; represents the output and stands for the control input, for ; and are the powers of in the i-th subsystem, with and being arbitrary positive odd integers and satisfying for ; and are unknown locally Lipschitz functions of its arguments, representing system nonlinearities, and which guarantees the controllability of system.
The control objective is to design a controller such that the output of system (1) can track the desired trajectory within an arbitrarily small error and all the closed-loop signals are bounded.
Assumption 1.
The power parameters and are unknown.
Assumption 2.
The desired reference signal and are bounded, and their boundaries are not necessarily known.
Remark 1.
In all the existing methods for high-order odd-rational-powers systems,
are assumed to be known. Thus Assumption 1 is more relaxed. System nonlinearities,
and
, are always assumed to be bounded by known functions multiplying by unknown parameters as was described in previous studies [20,21,22,23,24], while they are assumed to be completely unknown in this study.
Lemma 1
([5]). Suppose , then for any and , it holds that
Lemma 2
([19]). For any and positive odd integers
and
, there exist real-valued functions,
and
, such that
where and
with and being some positive constant constants that are independent of and .
In this section, the control scheme for nonlinear systems (1) with unknown odd rational powers is designed such that global boundedness can be guaranteed with unknown system nonlinearities.
Introduce a state transformation as follows:
where and are the performance functions which are chosen by designer. Throughout this paper, let with and being some positive constants, for .
Remark 2.
When the initial condition of the system changes, the parameters of the controller based on the barrier function need to be adjusted [25,26,27]. However, it may be difficult and impossible to obtain the initial conditions of the system sometimes. Therefore, we chose Equation (4) for error transformation without additional conditions, which indicates that the initial conditions of the system can be arbitrary. Moreover, the reason why we chose transformation (4) is that is the inverse of the barrier function we used.
Then, the intermediate control signals and the actual control signal are determined as follows:
where are the design parameters and can be chosen as arbitrarily positive constants.
Remark 3.
From (4)–(6), it can be seen that the barrier function and its inverse function, namely
and , are used simultaneously in designing the controller, and there is no knowledge on and in constructing controllers (5) and (6). In this sense, the proposed controller is model-free and independent of the powers . Furthermore, it is shown in (4)–(6) that no time derivative of are used in the controller design, which implies the simplicity of this controller. Therefore, introducing functions and to transform the state and tracking errors and designing controller results in many promising advantages for tracking control design. Specifically, compared with [20,21,22,23,24], the system nonlinearities, and , can be unknown in the proposed method. Moreover, compared with [19,20,21,22,23,24], the powers can be unknown and initial conditions of system states are no longer required in this research.
Remark 4.
It can be seen from (5) and (6) that the controller proposed in this paper does not contain any information about the system; instead, the information is only related to the tracking errors, which shows that the method can be applied to other systems after simple processing.
3. Stability Analysis
In this section, the main results of this article are present as follows.
Theorem 1.
Consider the closed-loop system consisting of uncertain nonlinear subsystems (1) satisfying Assumptions 1 and 2, the virtual control input (5) and the actual control input (6). Then, all the signals in the closed-loop system are globally uniformly bounded.
Proof.
It can be easily verified that , and there exists a positive constant such that , for . Define the error vector and introduce a compact set as follows:
where with being a positive constant defined later. It is obvious that .
In the following section, we will prove that for .
Define . If holds for , then for is obtained. Otherwise, there exists a time instant such that , where represents the first time that reaches . In this case, the proposition naturally holds for . Therefore, it is only required to prove that for .
It should be noted that, for , we have
which will be useful in the following analysis.
It should be noted that implies
In the following section, we will prove that for based on (8) and (9).
From (4), we have
Noting (4)–(6), we have
It can be observed from (10) that is a continuous function of , and , where and are bounded time-varying functions. A similar analysis can be made for and , .
Step 1: Consider the following positive definite function:
It follows from (1), (4) and (12) that the time derivative of is
Using (11) and Lemma 2, one has
Noting (14) and using Lemmas 1 and 2, one has
where is an unknown constant satisfying .
Using (13) and (15) and noting , one obtains
with
Note that are bounded in view of (9). Also, it follows from (8) and (9) that and are bounded. Therefore, is bounded due to (10). Utilizing the fact that , are bounded and employing the extreme value theorem owing to the continuity of and , we arrive at
with and being some positive constants.
Then, noting , substituting (19) and (20) into (16) yields
It follows from (21) that when , and subsequently that
From (22), we have
As a result, the control signal is bounded (i.e., ). Moreover, invoking (11) for and using (8) and (9), we also conclude the boundedness of .
Moreover, differentiating with respect to time yields
Therefore, it also can be easy to conclude the boundedness of .
Step 2: ; consider the following positive definite functions:
It follows from (1), (4) and (12) that the time derivative of is
Using (11) and Lemma 2, one has
Noting (27) and using Lemmas 1 and 2, one has
where is some unknown constant satisfying .
Using (26) and (28) and noting , one obtains
with
It follows from (8) and (9) that , and are bounded. Moreover, noting that , are bounded in the former steps and utilizing the fact that , are bounded and employing the extreme value theorem owing to the continuity of and , we arrive at
with and being some positive constants.
Then, noting , substituting (32) and (33) into (29) yields
It follows from (34) that when and subsequently that
From (35), we have
As a result, the control signal is bounded (i.e., ). Moreover, in invoking (11) and using (8) and (9), we also conclude the boundedness of .
Moreover, differentiating with respect to time yields
Therefore, it can be easy to conclude the boundedness of .
From (23) and (36), it can be seen that
for all , which implies is an invariant set for . Then, it can be seen from these steps that , are globally bounded, and the state and tracking errors satisfy (38) and hence by noting (4). Thus, all the closed-loop system signals are globally bounded. □
Remark 5.
The compact set is introduced and proved to be an invariant set to guarantee the system stability, in view of introducing
and into the control design. From (23), it is shown that , which implies by noting (4). Therefore, by choosing and , the tracking error, , can be regulated to an arbitrarily prescribed small set.
4. Simulation Study
To verify the effectiveness of the proposed method, consider the following high-order nonlinear systems:
where . Set the initial conditions as , and the desired trajectory signal is set as . Then, the virtual control input and the actual control input are designed according to (5) and (6), respectively. The control parameters and performance functions are selected as , , .
The simulation results are presented in Figure 1, Figure 2, Figure 3, Figure 4 and Figure 5. It can be seen from Figure 1 that the system output can track the desired trajectory well. The curve of tracking error is illustrated in Figure 2, indicating that the tracking error will converge to a small set. The actual control signal and the system state are shown in Figure 3 and Figure 4, respectively. Moreover, the system tracking error and the prescribed bound are shown in Figure 5, and Figure 5 illustrates that the dynamic and steady-state performance of tracking error can be adjusted by selecting the parameters of performance function . According to the simulation results, the proposed control method guarantees that all closed-loop signals are bounded.

Figure 1.
System output y and desired trajectory yd.
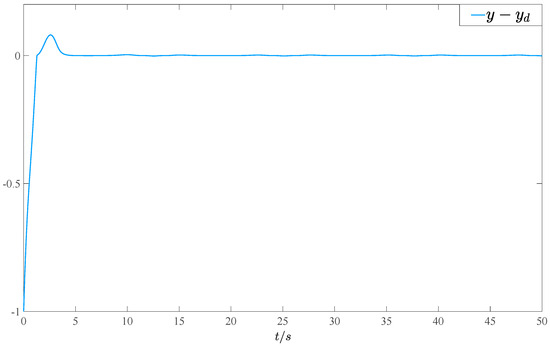
Figure 2.
Tracking error y − yd.

Figure 3.
Control input u.
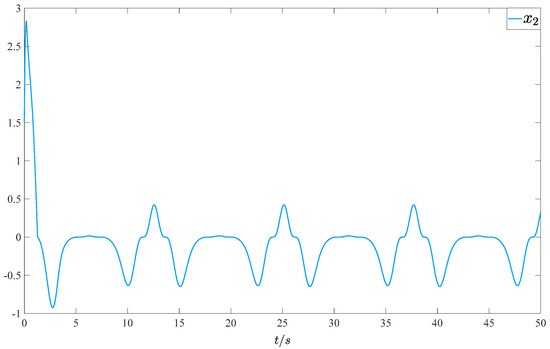
Figure 4.
The system state x2.
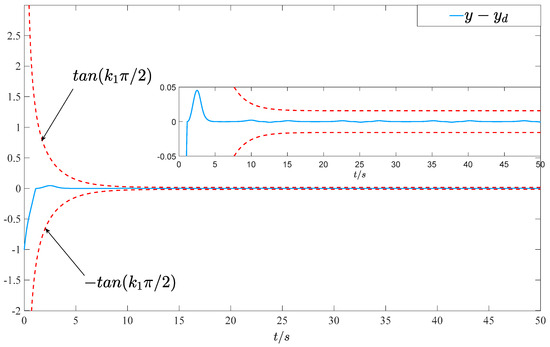
Figure 5.
Tracking performance.
To further show the performance of the proposed global control method, we changed the initial conditions to , while keeping all the other conditions unchanged. Then, the simulation results are depicted in Figure 6 and Figure 7.

Figure 6.
System output y and desired trajectory yd.
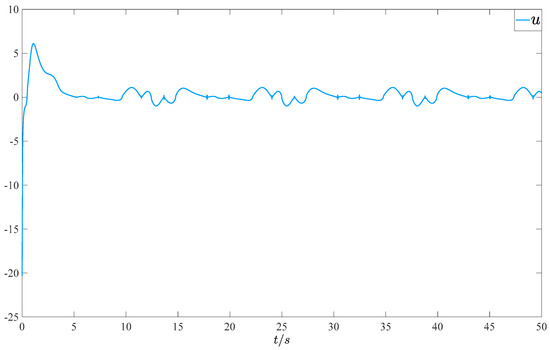
Figure 7.
Control input u.
5. Conclusions
This paper solved the global control problem of high-order nonlinear systems with unknown odd rational powers and nonlinearities. A global tracking control method without using rational powers was proposed by introducing barrier functions and their inverse functions to construct transformations for the system state and tracking errors, solving the problems caused by unknown odd rational powers. The knowledge of system nonlinearities and odd rational powers is no longer required compared with all the existing methods. The global boundedness of all closed-loop signals is guaranteed. Further research can be focused on high-order nonlinear systems with time-delay and uncertain input.
Author Contributions
Conceptualization, Z.L.; simulation, C.H.; writing—original draft preparation, C.H.; writing—review and editing, C.H. and Z.L.; validation, H.L.; supervision, J.G. and Y.C.; visualization, Y.C.; project administration, Q.L.; funding acquisition, Q.L. and Y.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China and the Nature Science Foundation of Shaanxi Province, China, grant numbers 62106284 and 2023-JC-YB-522.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liu, Z.; Huang, H.; Park, J.H.; Huang, J.; Wang, X.; Lv, M. Adaptive Fuzzy Control for Unknown Nonlinear Multiagent Systems with Switching Directed Communication Topologies. IEEE Trans. Fuzzy Syst. 2023, 31, 2487–2494. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, J.; Wen, C.; Su, X. Distributed control of nonlinear systems with unknown time-varying control coefficients: A novel Nussbaum function approach. IEEE Trans. Autom. Control 2023, 68, 4191–4203. [Google Scholar] [CrossRef]
- Lin, W.; Qian, C. Adding one power integrator: A tool for global stabilization of high-order lower-triangular systems. Syst. Control Lett. 2000, 39, 339–351. [Google Scholar] [CrossRef]
- Lin, W.; Qian, C. Adaptive regulation of high-order lower-triangular systems: An adding a power integrator technique. Syst. Control Lett. 2000, 39, 353–364. [Google Scholar] [CrossRef]
- Sun, Z.; Shao, Y.; Chen, C. Fast finite-time stability and its application in adaptive control of high-order nonlinear system. Automatica 2019, 106, 339–348. [Google Scholar] [CrossRef]
- Lv, M.; Chen, Z.; De Schutter, B.; Baldi, S. Prescribed-performance tracking for high-power nonlinear dynamics with time-varying unknown control coefficients. Automatica 2022, 146, 110584. [Google Scholar] [CrossRef]
- Ding, C.; Wei, R. Low-Complexity Tracking Control for p-Normal Form Systems Using a Novel Nussbaum Function. IEEE Trans. Autom. Control 2022, 67, 2640–2647. [Google Scholar] [CrossRef]
- Sun, Z.; Yun, M.; Li, T. A new approach to fast global finite-time stabilization of high-order nonlinear system. Automatica 2017, 81, 455–463. [Google Scholar] [CrossRef]
- Liu, J.; Jiang, Y. Adaptive fuzzy control for high-order nonlinear systems with time-varying full-state constraints and input saturation. Int. J. Adapt. Control 2023, 37, 710–725. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, C.; Wang, Z. Adaptive disturbance attenuation for generalized high-order uncertain nonlinear systems. Automatica 2017, 80, 102–109. [Google Scholar] [CrossRef]
- Fang, L.; Ding, S.; Park, J.H.; Ma, L. Adaptive Fuzzy Control for Nontriangular Stochastic High-Order Nonlinear Systems Subject to Asymmetric Output Constraints. IEEE Trans. Cybern. 2022, 52, 1280–1291. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Shi, P.; Zheng, X.; Zhang, J. Intelligent Tracking Control for a Class of Uncertain High-Order Nonlinear Systems. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1976–1982. [Google Scholar] [CrossRef] [PubMed]
- Su, Z.; Qian, C.; Shen, J. Interval Homogeneity-Based Control for a Class of Nonlinear Systems with Unknown Power Drifts. IEEE Trans. Autom. Control 2017, 62, 1445–1450. [Google Scholar] [CrossRef]
- Chen, C.; Qian, C.; Lin, X.; Sun, Z.; Liang, Y. Smooth output feedback stabilization for a class of nonlinear systems with time-varying powers. Int. J. Robust. Nonlinear 2017, 27, 5113–5128. [Google Scholar] [CrossRef]
- Man, Y.; Liu, Y. Global adaptive stabilization and practical tracking for nonlinear systems with unknown powers. Automatica 2019, 100, 171–181. [Google Scholar] [CrossRef]
- Guo, C.; Xie, R.; Xie, X. Adaptive Control of Full-State Constrained High-Order Nonlinear Systems with Time-Varying Powers. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 5189–5197. [Google Scholar] [CrossRef]
- Guo, C.; Xie, X.; Hou, Z. Removing Feasibility Conditions on Adaptive Neural Tracking Control of Nonlinear Time-Delay Systems with Time-Varying Powers, Input, and Full-State Constraints. IEEE Trans. Cybern. 2022, 52, 2553–2564. [Google Scholar] [CrossRef]
- Wang, M.; Liu, Y.; Man, Y. Switching Adaptive Controller for the Nonlinear Systems with Uncertainties from Unknown Powers. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2375–2385. [Google Scholar] [CrossRef]
- Lv, M.; De Schutter, B.; Cao, J.; Baldi, S. Adaptive Prescribed Performance Asymptotic Tracking for High-Order Odd-Rational-Power Nonlinear Systems. IEEE Trans. Autom. Control 2023, 68, 1047–1053. [Google Scholar] [CrossRef]
- Liu, Z.; Shi, Y.; Wu, Y. Tracking Control of Uncertain High-Order Nonlinear Systems with Odd Rational Powers and the Dead-Zone Input: A Direct Fuzzy Adaptive Control Method. J. Syst. Sci. Complex. 2022, 35, 1685–1699. [Google Scholar] [CrossRef]
- Liu, Z.; Sun, W.; Zhang, W. Robust adaptive control for uncertain nonlinear systems with odd rational powers, unmodeled dynamics, and non-triangular structure. ISA Trans. 2022, 128, 81–89. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Xue, L.; Zhang, W. Universal adaptive control strategies for stochastic nonlinear time-delay systems with odd rational powers. Automatica 2021, 125, 109419. [Google Scholar] [CrossRef]
- Fu, J.; Ma, R.; Chai, T. Adaptive Finite-Time Stabilization of a Class of Uncertain Nonlinear Systems via Logic-Based Switchings. IEEE Trans. Autom. Control 2017, 62, 5998–6003. [Google Scholar] [CrossRef]
- Liu, J.; Wang, C.; Cai, X. Adaptive neural network finite-time tracking control for a class of high-order nonlinear multi-agent systems with powers of positive odd rational numbers and prescribed performance. Neurocomputing 2021, 419, 157–167. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica 2014, 50, 1217–1226. [Google Scholar] [CrossRef]
- Wang, N.; Tao, F.Z.; Fu, Z.M.; Song, S.Z. Adaptive Fuzzy Control for a Class of Stochastic Strict Feedback High-Order Nonlinear Systems with Full-State Constraints. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 205–213. [Google Scholar] [CrossRef]
- Wu, L.-B.; Park, J.H.; Guo, L.-D.; Huang, S.-J. Prescribed performance event-triggered fault-tolerant control of uncertain pure-feedback nonlinear systems. Int. J. Control 2023, 1–10. [Google Scholar] [CrossRef]
- Wang, T.; Ma, M.; Qiu, J.; Gao, H. Event-Triggered Adaptive Fuzzy Tracking Control for Pure-Feedback Stochastic Nonlinear Systems with Multiple Constraints. IEEE Trans. Fuzzy Syst. 2021, 29, 1496–1506. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Q. Prescribed performance-barrier Lyapunov function for the adaptive control of unknown pure-feedback systems with full-state constraints. Nonlinear Dyn. 2018, 95, 2443–2459. [Google Scholar] [CrossRef]
- Wang, T.; Wu, J.; Wang, Y.; Ma, M. Adaptive Fuzzy Tracking Control for a Class of Strict-Feedback Nonlinear Systems with Time-Varying Input Delay and Full State Constraints. IEEE Trans. Fuzzy Syst. 2020, 28, 3432–3441. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).