Two different approaches were evaluated for their ability to keep the harmonic distortion of the hybrid generator below the thresholds set by EN 50160. The first approach is passive filtering, while the second involves regulating the electromagnetic torque to dampen oscillations. The voltage harmonics of the generator are an integer multiple of the system’s frequency, which is proportional to the generator’s speed. Consequently, the rotor’s speed will fluctuate significantly around the chosen point of operation, and this will also affect the electromagnetic torque. In light of this, we will examine the electric harmonics and torque ripples in more detail.
3.2.1. Passive Filtering
To improve system stability, the passive filtering wad proposed in [
22,
23,
24]. Filtering involves placing a low-value impedance around the frequency that needs to be filtered, which is still significant compared to the fundamental frequency of operation. Active filters and passive filters are the two types of filters that are commonly used. In this study, we focused on the second option because it does not require any additional energy source. The goal of this research is to create a low-cost and efficient solution. This technology is particularly ideal for isolated wind energy applications. Adopting an external energy source would greatly increase the system’s cost and complexity, making it unsuitable for usage in the field. As a result, adopting passive filters is a cost-effective way to provide harmonic filtering.
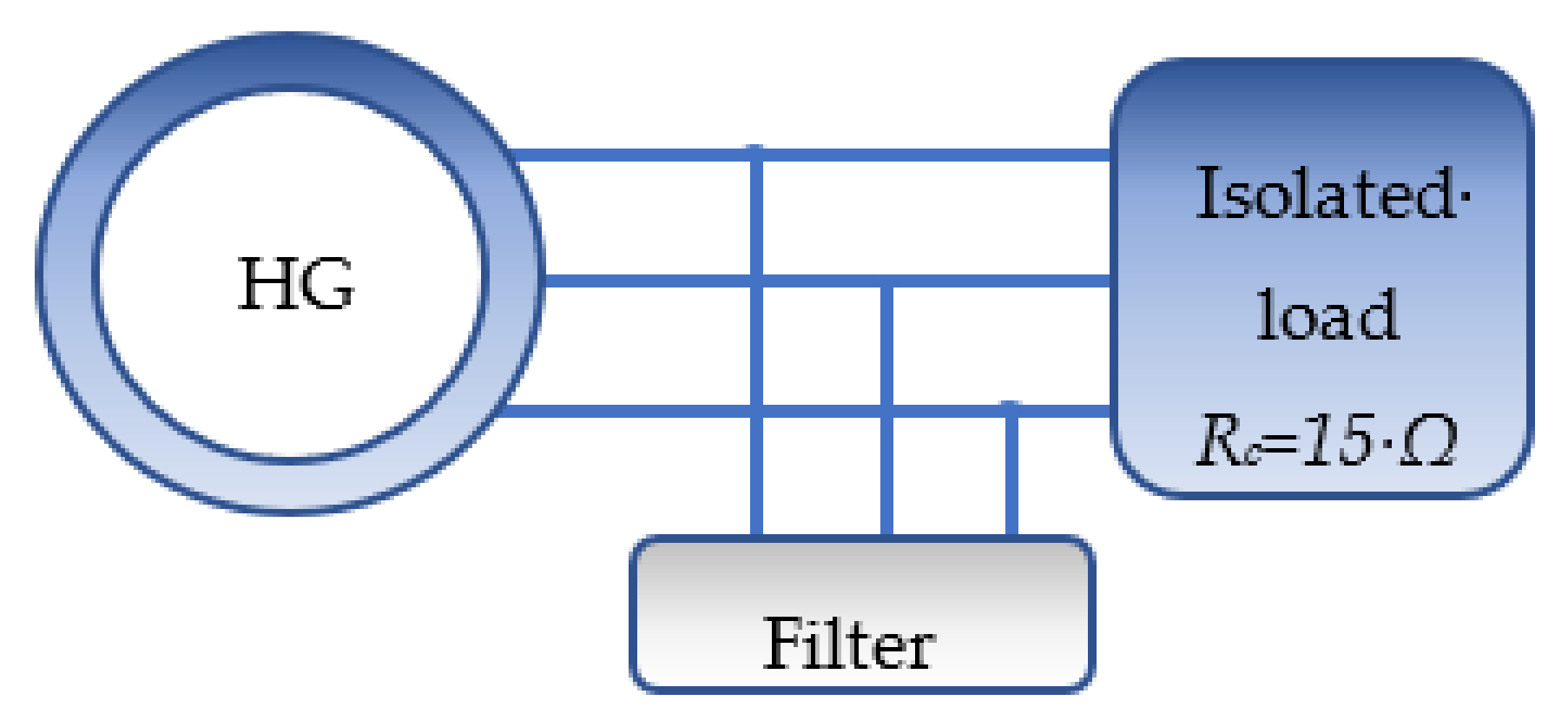
Passive filters consist of various elements, including capacitance, inductance, and resistance, and are primarily designed to reduce or eliminate harmonic distortion. The installation of a low-pass filter helps filter out the high-frequency components of the electrical supply. In most cases, shunt filters are used because they can be connected parallel to the loads and do not interfere with their operation, as shown in
Figure 15 [
22].
This filter’s cutoff frequency is set at the maximum operating frequency
fmax (7).
With Ωgm = 239 rd/s: operating speed in zone III.
In the end, the filter is expressed as:
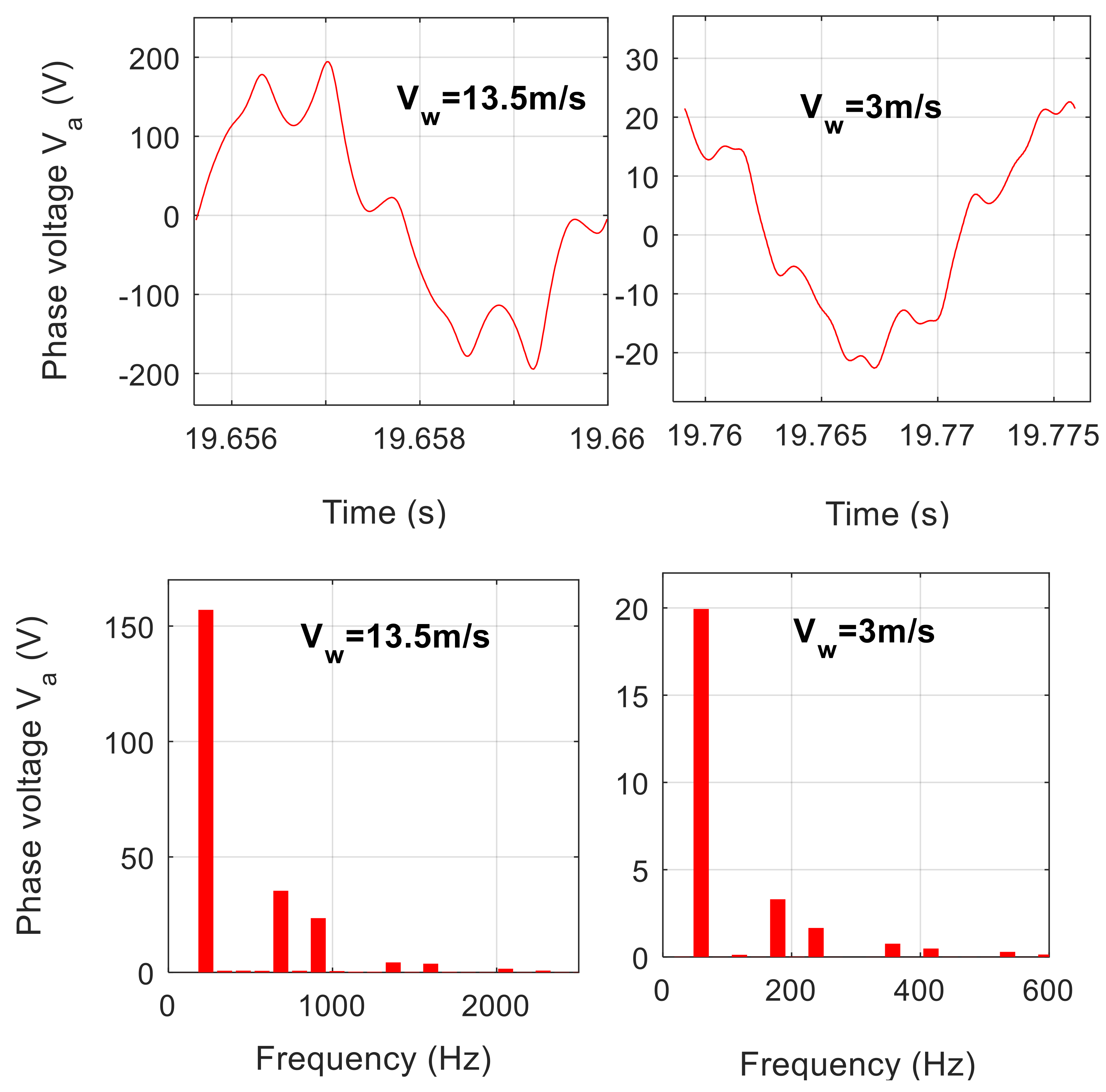
We begin by testing the filter at high speed (
vw =13.5 m/s).
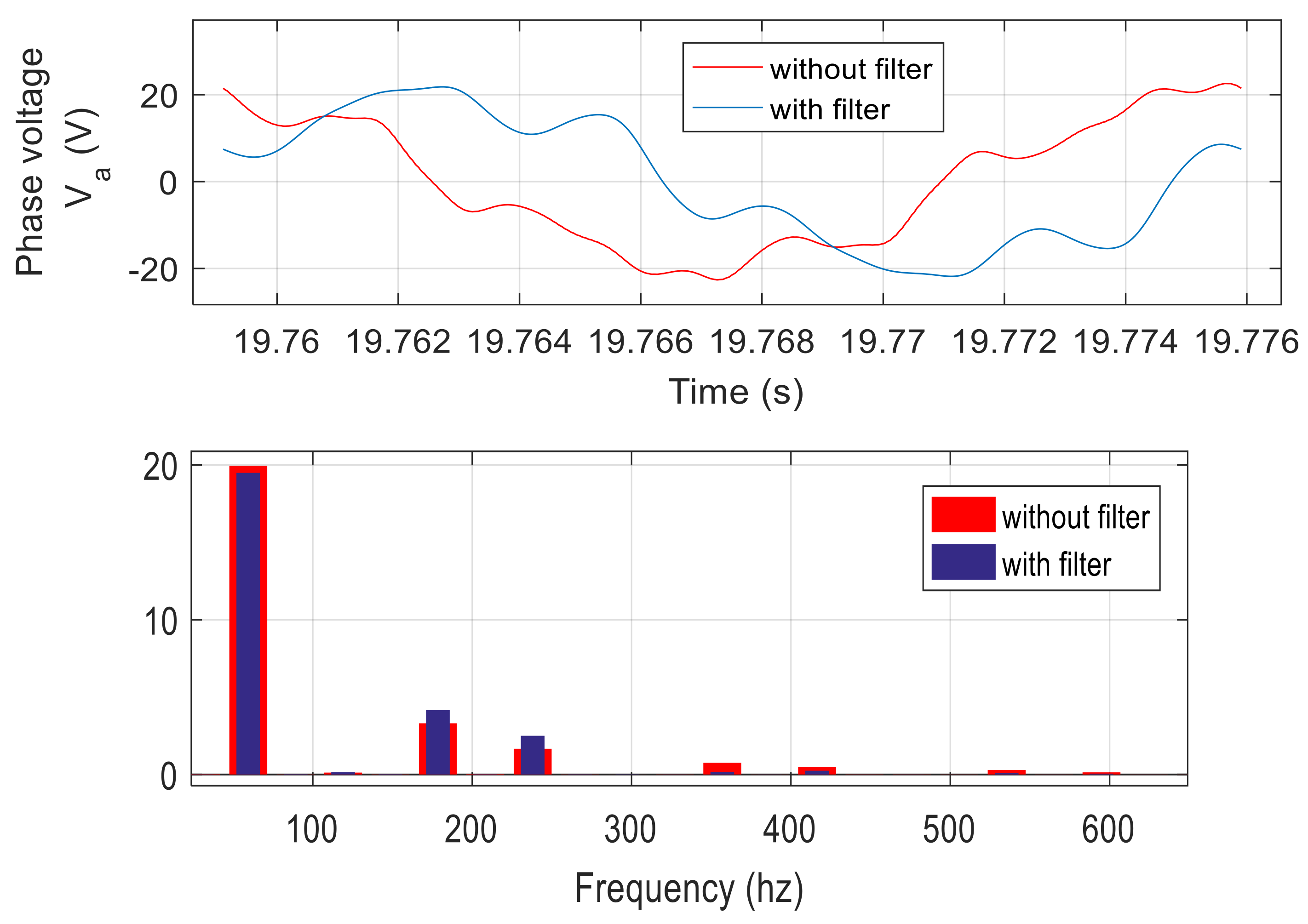
Figure 16 displays the waveform of the stator voltage and its FFT analysis. The total harmonic distortion and harmonic rates 3, 4, and 6 are significantly reduced (
Table 5), but the filter still does not meet the standards set by EN 50160.
This filter interferes with the low-speed functioning of the wind system by adding harmonics and causing the generator to switch to low rotational speeds.
Figure 17 depicts the results of an analysis performed at a starting speed of
vw =
Vd = 3 m/s. It is shown that the addition of the low-pass filter increases the overall THD from 16.58% without the filter to 21.34%, making this solution unsuitable for the autonomous operation of the wind generator.
After deployment, these filters are inflexible and cannot accommodate changes in the system, which can be problematic. Any adjustments to the assigned amount or frequency are not possible, and a shift in the system’s operating conditions can lead to significant current peaks, harmonic resonance, and other phenomena.
3.2.2. Electromagnetic Torque Control
The problem of reducing electromagnetic torque ripples of a hybrid excitation synchronous generator was first addressed in [
25]. The main idea proposed in the paper is to control the excitation current at a specific operating point to reduce torque ripple. The theoretical approach involves finding the appropriate excitation current to adjust the torque at specific points over its period of variation for low rotational speeds.
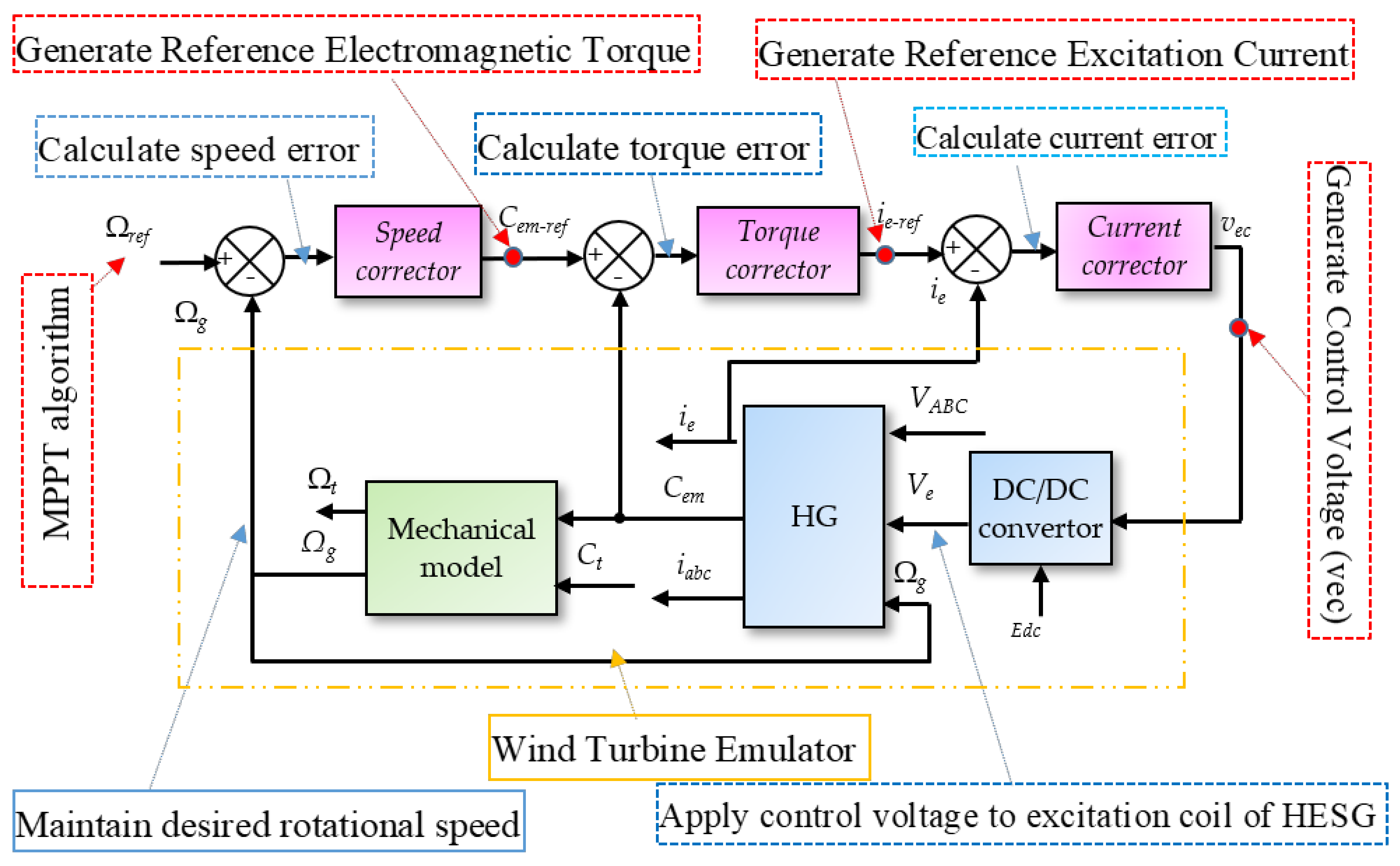
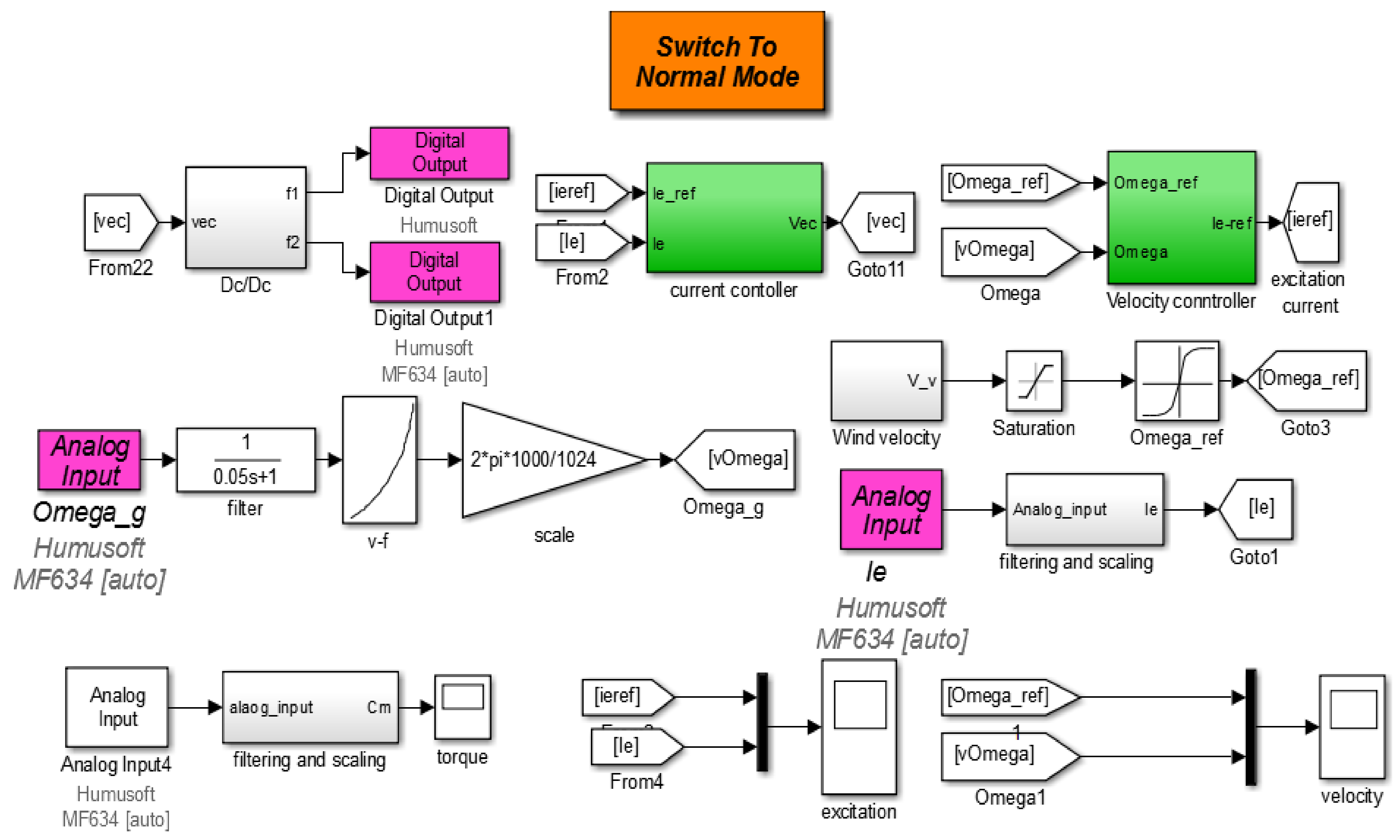
One of the novelties of our work is the implementation of a robust controller capable of minimizing the electromagnetic torque ripple through excitation current at all operating points. The control structure hierarchy is as follows: a current corrector,
K′i (s), receives the error between
ieref and
ie, to generate the control voltage,
vec. The torque corrector,
KCem (s), generates the reference excitation current by receiving the difference between the C
em and the reference electromagnetic torque. The reference electromagnetic torque is derived from the cruise control system, denoted as
K′Ω (s) Figure 18.
The electromagnetic torque is subject to rapid oscillations. To reduce these oscillations through manipulation of ie, this current must have a dynamic that can overcome them. If this is practically feasible, the response time of the current corrector can is 0.01 ms. It should be noted that the purpose of this paragraph is only to test the feasibility of minimizing the electromagnetic torque ripples by adjusting ie.
The electromagnetic torque is written in the reference frame d-q in the form:
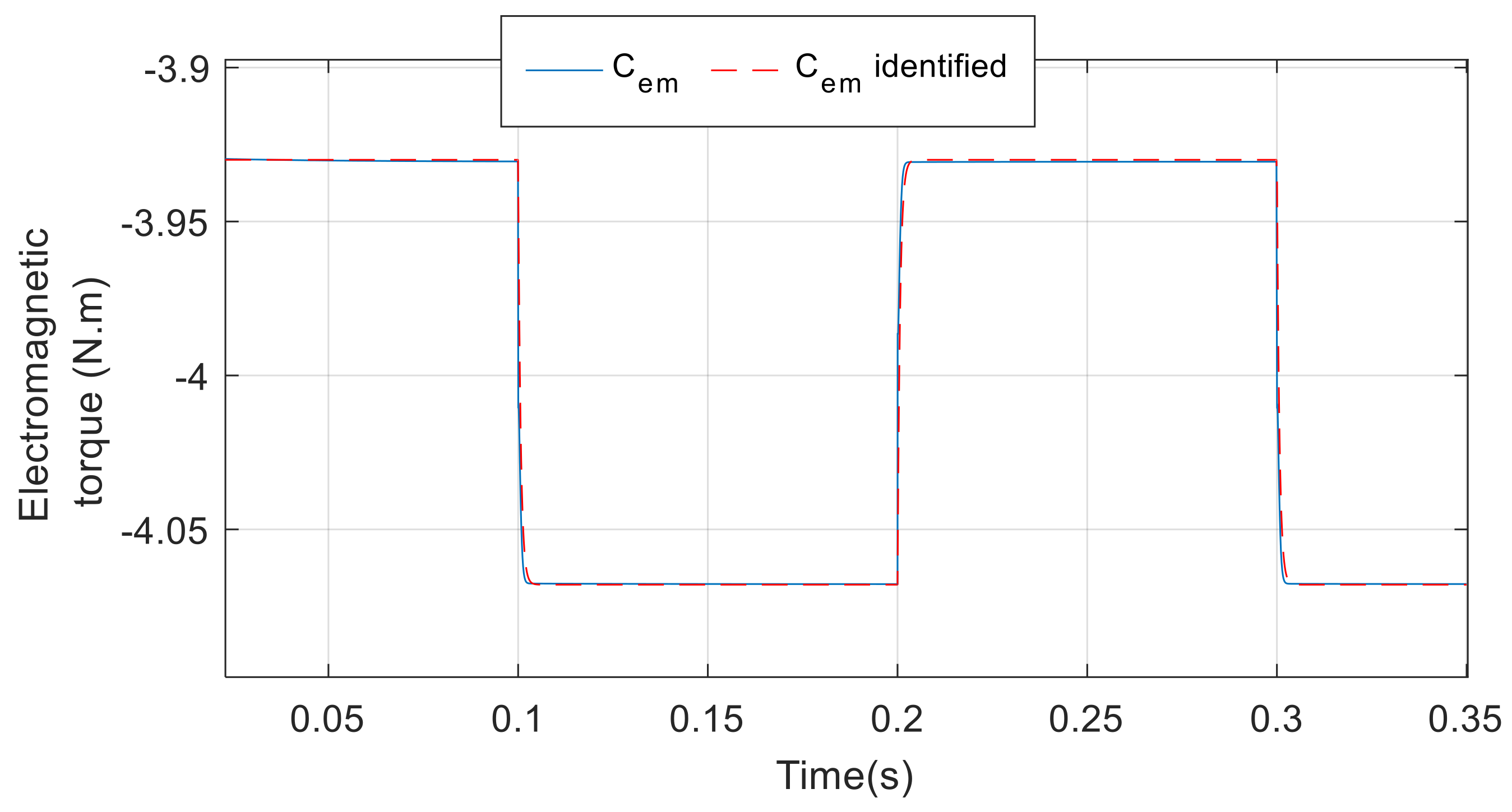
Given the non-linearity of the relation (10),
Ccem =
f (ieref) is established on the model without harmonics and commutations and an average model is chosen for a rotational speed of 150 rd/s (
Figure 19). Its transfer function (TF) is given by (11):
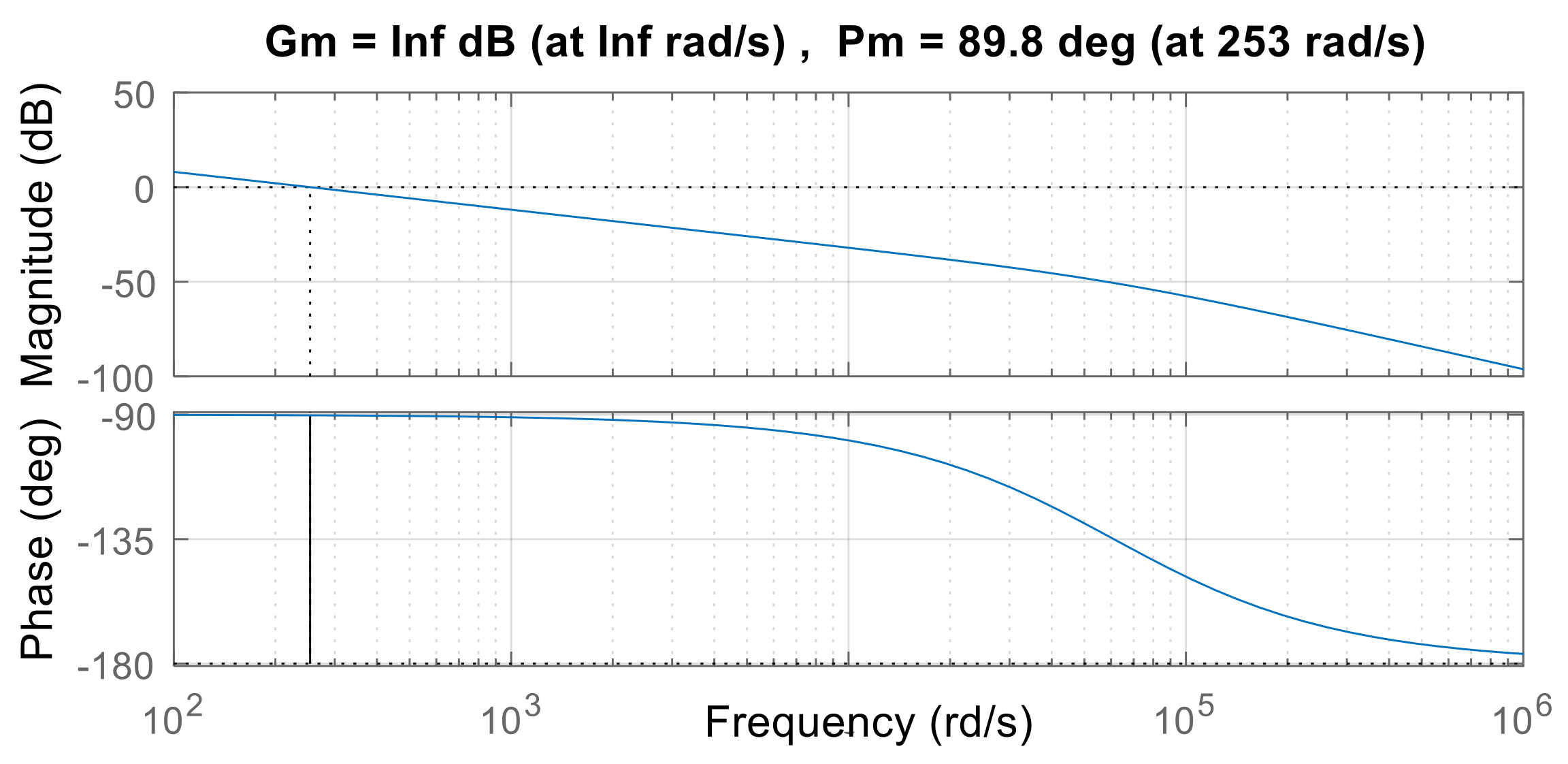
An H∞ controller is designed for this loop. The optimal response time for the torque loop is 1 millisecond (ms), which implies that its frequency should be lower than that of the current loop (which is indeed the case). Additionally, the speed loop is designed to be ten times faster than the outermost speed loop to enhance the effectiveness of the torque loop. Consequently, we can lower the requirements of the torque loop to a bandwidth of 253 rd/s.
This work uses the Normalized Coprime Factors (NCF) robust stabilization problem H
∞ control theory [
26]. The nominal plant’s normalized left coprime factorization is given in (12) where Y(s) and Z(s) are stable TFs.
The NCF technique produces a controller that stabilizes the nominal plant
as well as any model subject to additive uncertainty on
and
and belongs to the perturbed plant set (13)
is reflects the greatest quantity or magnitude of uncertainty that can withstand without becoming unstable.
The goal is to solve the following equation to identify a regulator
(s) that stabilizes all plants, where σ
max indicates the largest stability margin.
The selected pre-compensator
W1c(s) is a PIF controller with a gain that can be adjusted for a 253 rd/s bandwidth. Since Equation (11) does not include an integrator, the high gain at low frequencies is ensured by the integral action. After being configured,
W1c(
s) is represented by Equation (15), and the final controller, computed by the MATLAB
ncfsyn function, is shown in Equation (16). The pre-compensator role is to adjust the open-loop shape.
A maximum stability margin of 0.7 and a phase margin of 89.8° (
Figure 20) are obtained, which is satisfactory in terms of robustness of the closed-loop system.
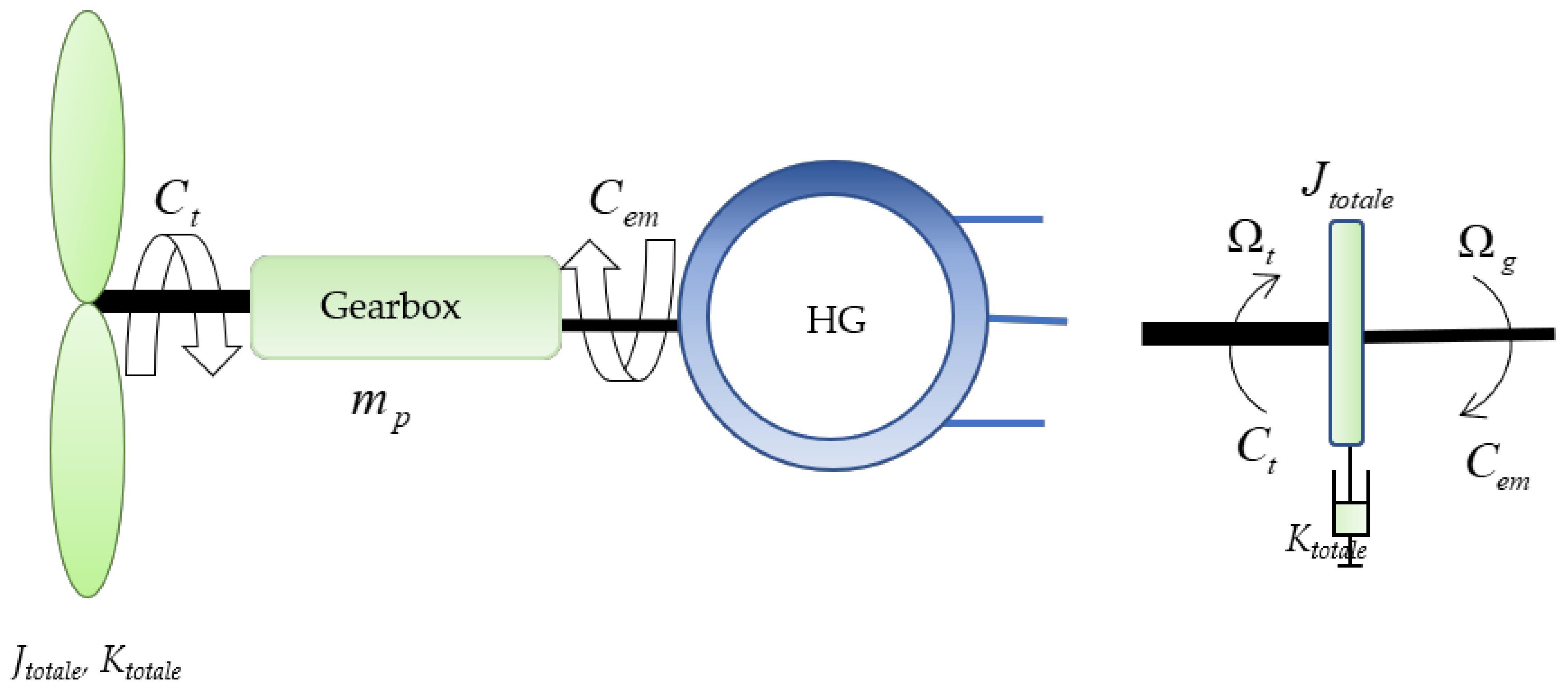
This loop was synthesized by considering a transmission chain model with a single mass, considering the complete power train, and a single friction coefficient grouping together all the friction of the rotating parts of the system. In this model (
Figure 21), both the fast and slow shafts are perfectly rigid. Indeed, since the three blades are assumed to be identical, they are combined into a single mass. The inertia of the generator and gearbox can be neglected in front of the inertia of the blades and hub as a first approximation since they generally represent no more than 10% of the turbine’s total inertia: 6% to 8% for the generator and 2% to 4% for the gearbox. Alternatively, we can transfer the inertia
Jg and friction
Kg of the generator to the slow shaft side. In this case, we have:
The fundamental relation of dynamics applied to
Jtotale implies:
The resistive torque
Crt is in Equation (20).
Figure 21.
One mass mechanical model.
Figure 21.
One mass mechanical model.
For single-mass modelling of the mechanical part of the turbine, the block diagram is as shown in
Figure 22.
The turbine’s torque is an undesirable fluctuation. The control transfer function is in (21):
The speed loop is based on a PI controller. The desired response time is 6 s, and its bandwidth is set at 7.28 rd/s. The corrector is given by (22):
The Bode diagram of the corrected velocity open loop is shown in
Figure 23. A satisfactory phase margin of 90° is obtained around the bandwidth.
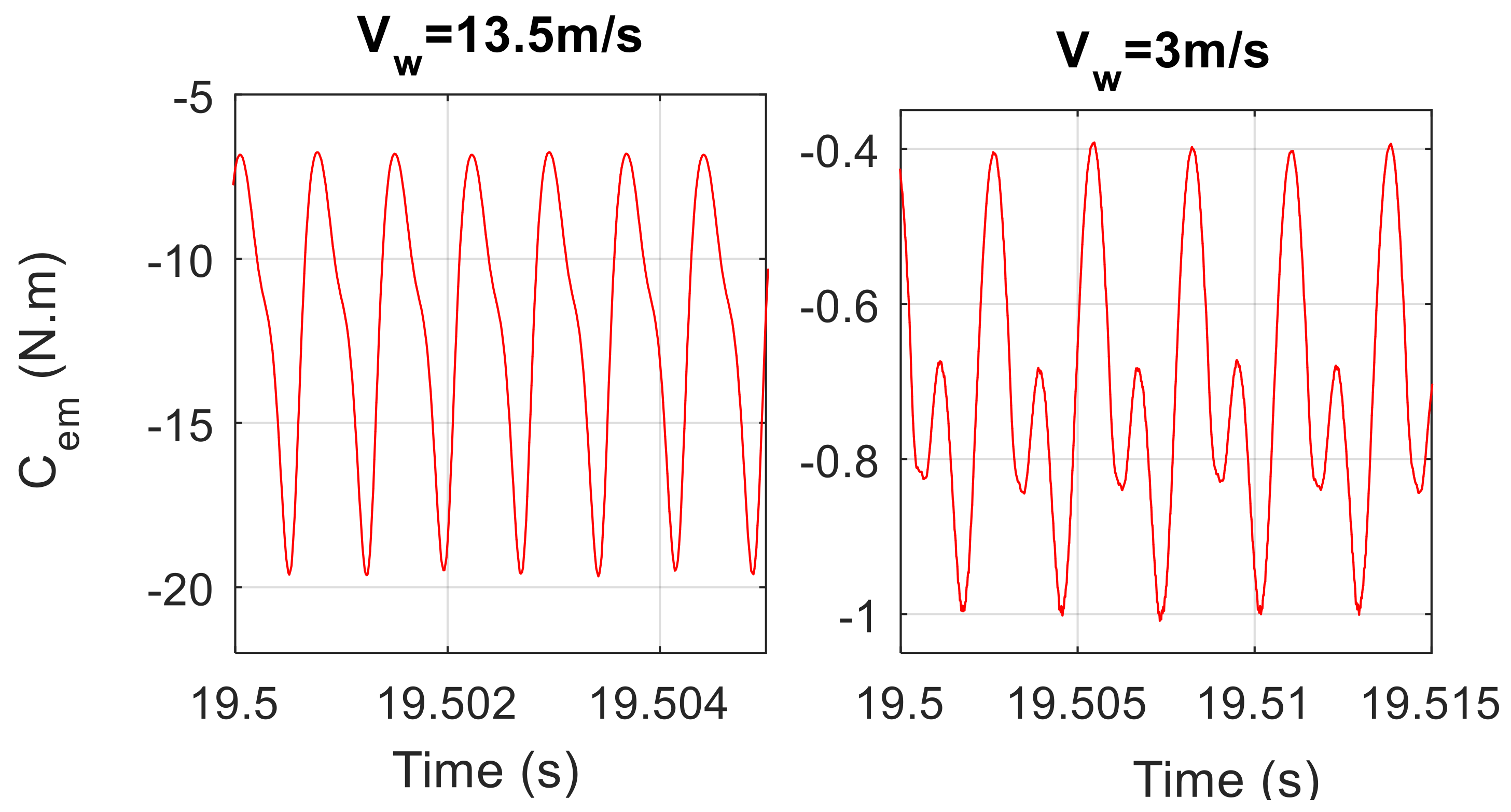
The newly implemented strategy (
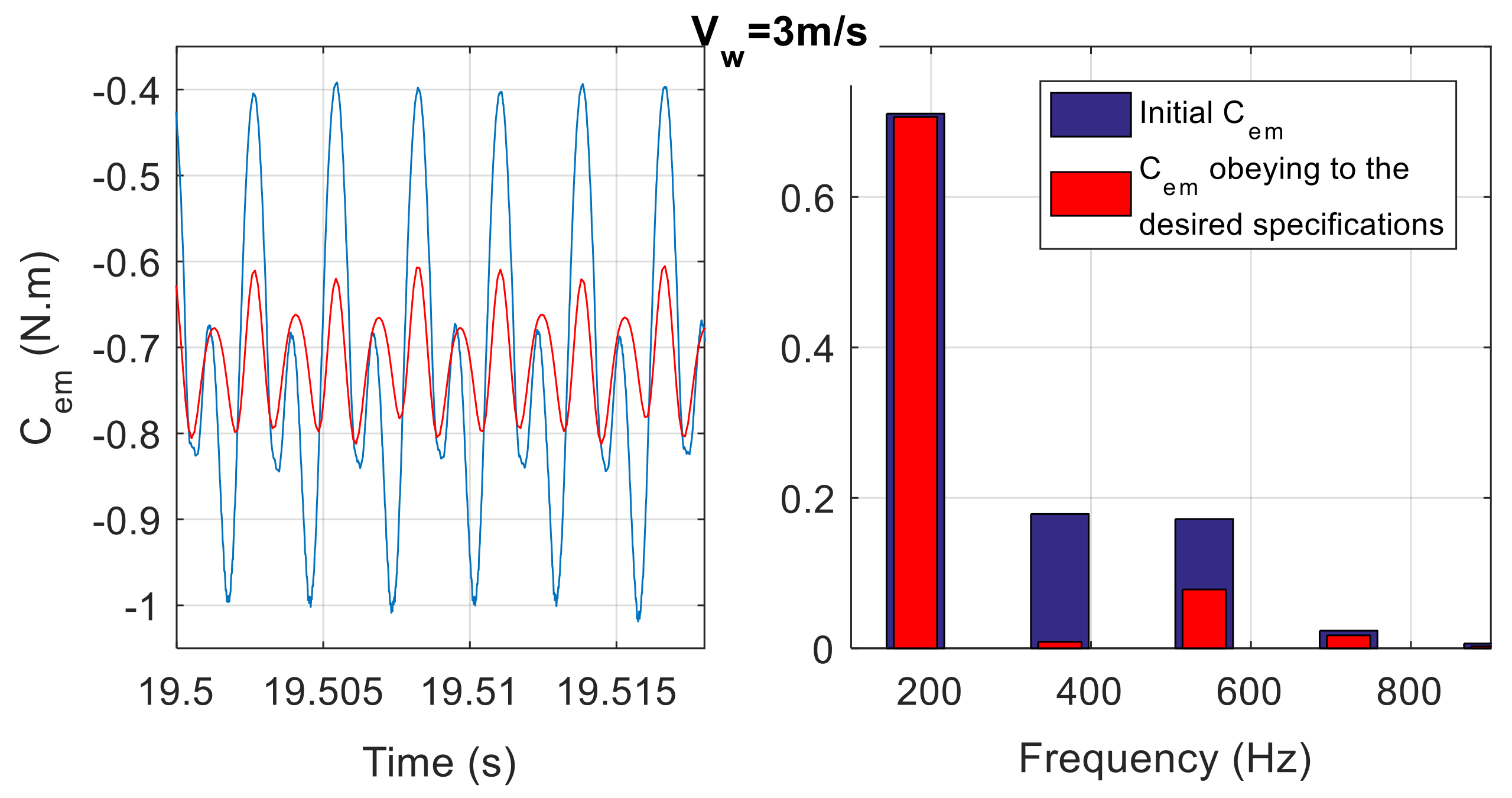
Figure 18) enables the reduction of the electromagnetic torque ripple. For a wind speed of 3 m/s, which corresponds to the lowest operating speed, the FFT analysis of C
em reveals a decrease in its THD by 31.27% to 29.8% (
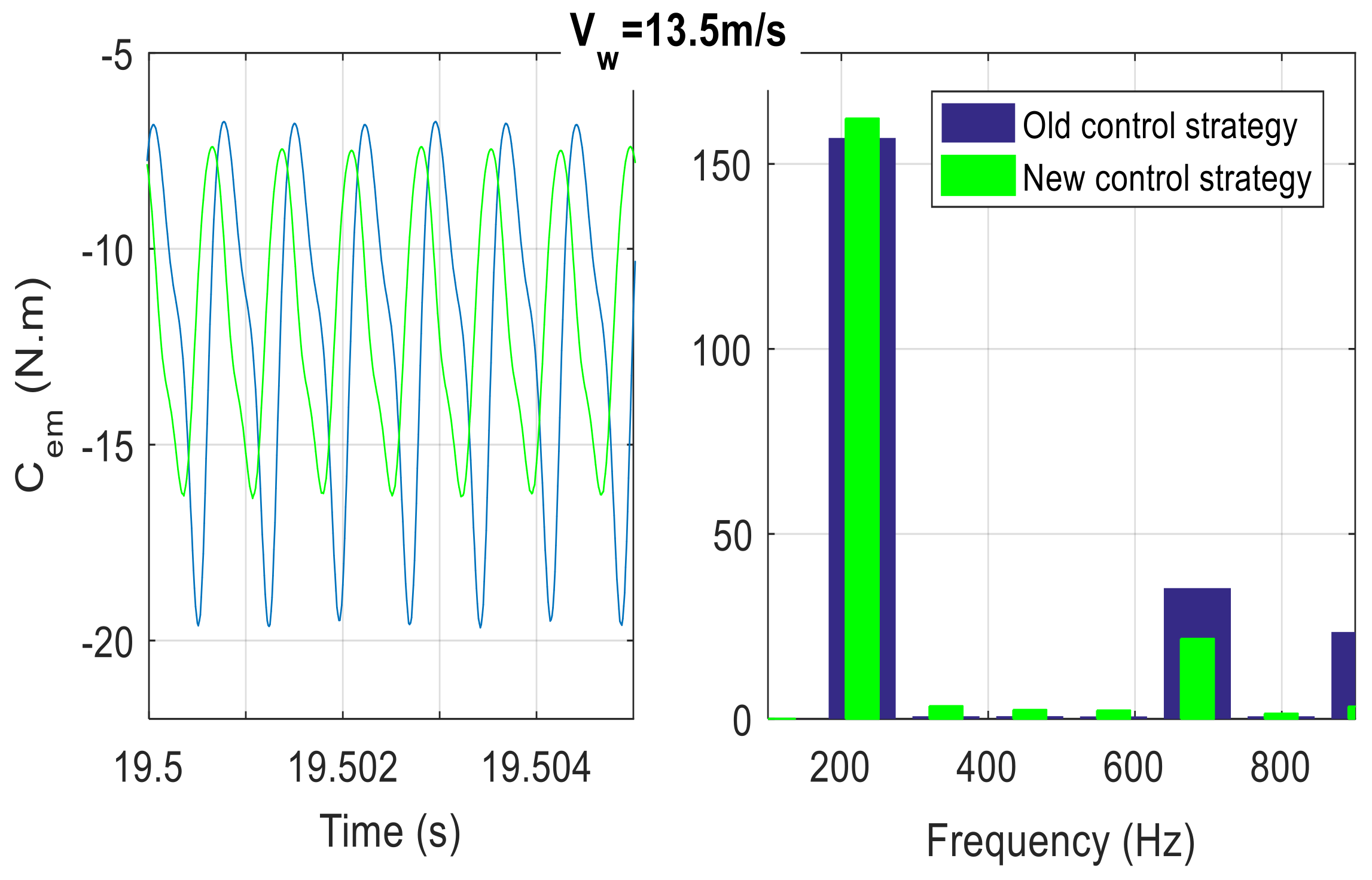
Figure 24). However, subharmonics of rank 1.5 and 2.5 appeared for
vw = 13.5 m/s, corresponding to the highest operating speed (
Figure 25). The rank 3 harmonic is higher with the new control strategy, but the THD is reduced from 47.15% to 36.3%.
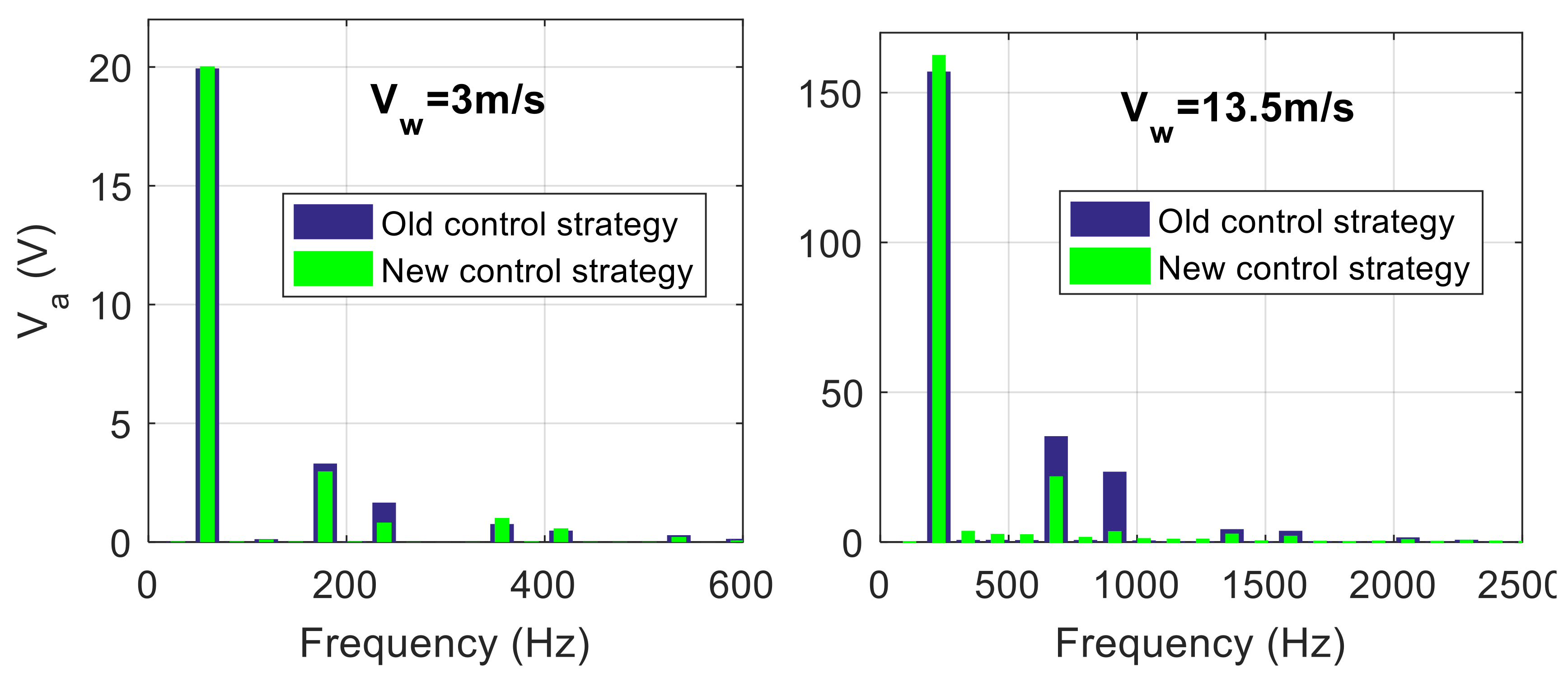
At high speeds, the overall THD is reduced from 27.32% to 14.04%, and at low speeds, from 19.18% to 16.54%, as shown by the FFT analysis of the stator voltages (
Figure 26). Despite this improvement, the proposed solution is still not sufficient to comply with the specifications of EN 50160 [
20].



 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}