

Redundancy Allocation of Components with Time-Dependent Failure Rates



Abstract
:1. Introduction
2. Materials and Methods
2.1. Problem Formulation
2.1.1. Notation
| ) | |
| number of subsystems | |
| number of active components allocated to subsystem i | |
| number of standby components allocated to subsystem i | |
| ) | |
| ) | |
| reliability at time t of the component (all identical) allocated to subsystem i | |
| shape parameter of the Erlang distribution for the component allocated to subsystem i | |
| rate parameter of the Erlang distribution for the component allocated to subsystem i | |
| cost and weight of the component allocated to subsystem i | |
| cost and weight of the switching system used in subsystem i (if present) | |
| maximum allowed amount for the system weight and cost | |
| switching system reliability at time t for subsystem i (if present) | |
| pdf of the jth failure time of standby components allocated to subsystem i at time t | |
| pdf of time to failure of the last active component allocated to subsystem i at time t | |
| pdf of the time to failure of the component allocated to subsystem i at time t | |
| cdf of the time to failure of the component allocated to subsystem i at time t | |
| average rate of occurrence of events between times a and b () | |
| number of events occurred until time t. |
2.1.2. Assumptions
- The components and the entire system are binary, i.e., they can be either totally healthy or completely failed.
- Components failures are independent events that individually cause no damage to the system.
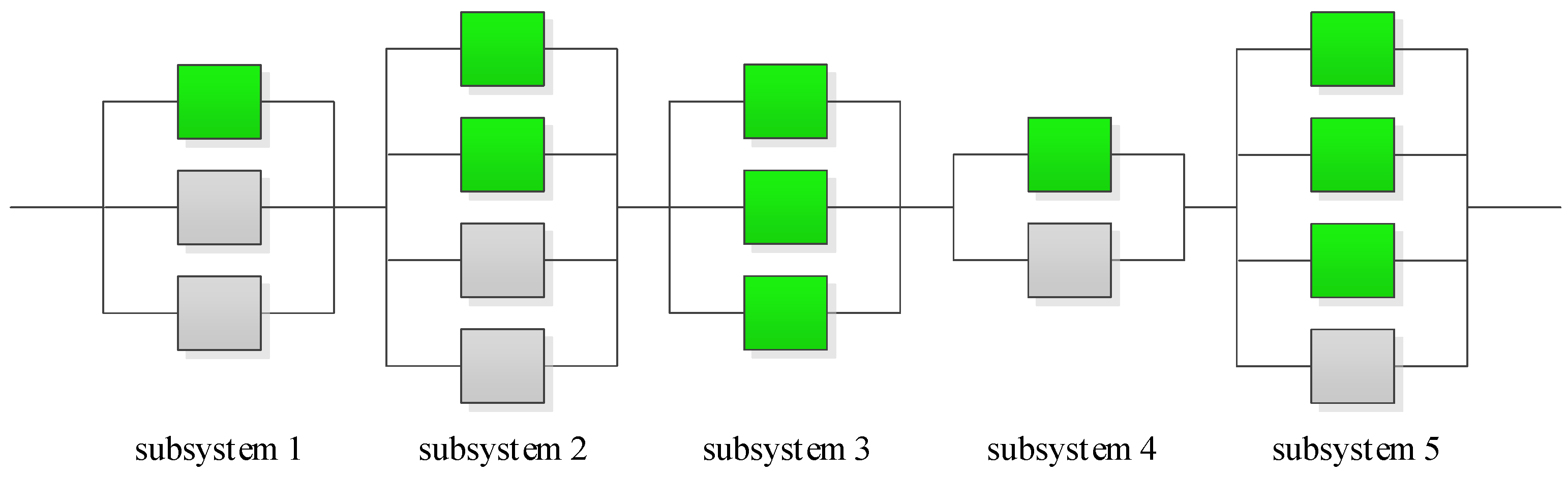
- The redundancy strategy for each subsystem is a decision variable that can be selected to be active, standby, mixed or none.
- The distribution of the time to failure of the components has the form of an Erlang distribution with a time-dependent parameter λ(t).
- The components are non-repairable and there is no preventive maintenance.
- The components of each subsystem are identical, i.e., mixing of component types is not allowed.
2.1.3. Mathematical Model
2.2. RAP Solution Method
2.2.1. Solution Encoding (Chromosome)
2.2.2. Initial Population
2.2.3. Fitness Function
2.2.4. Selection
2.2.5. Crossover Operator
2.2.6. Mutation Operator
2.2.7. Stopping Criteria
3. Results
| 1. Weighting machine, | 2. Sifter machine, | 3. Mass machine, |
| 4. Granulator, | 5. Fluid bed dryer, | 6. Octagonal blender, |
| 7. Rotary compression machine, | 8. Coating machine, | 9. Air compressor, |
| 10. Strip packing machine. |
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component Type 1 (j = 1) | Component Type 2 (j = 2) | Component Type 3 (j = 3) | Component Type 4 (j = 4) | |||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| i | λ0ij | α1ij | α2ij | t1ij | t2ij | kij | cij | wij | λ0ij | α1ij | α2ij | t1ij | t2ij | kij | cij | wij | λ0ij | α1ij | α2ij | t1ij | t2ij | kij | cij | wij | λ0ij | α1ij | α2ij | t1ij | t2ij | kij | cij | wij |
| 1 | 0.052 | 0.3 | 3 | 10 | 90 | 6 | 2 | 4 | 0.007 | 0.1 | 2 | 12 | 90 | 2 | 2 | 4 | 0.049 | 0.4 | 2 | 10 | 100 | 4 | 3 | 2 | 0.081 | 0.3 | 3 | 10 | 80 | 4 | 3 | 4 |
| 2 | 0.017 | 0.5 | 2 | 15 | 120 | 4 | 2 | 5 | 0.110 | 0.4 | 4 | 18 | 100 | 4 | 3 | 5 | 0.124 | 0.3 | 3 | 5 | 75 | 6 | 2 | 6 | 0.046 | 0.1 | 5 | 5 | 75 | 4 | 4 | 3 |
| 3 | 0.043 | 0.4 | 4 | 8 | 110 | 5 | 3 | 4 | 0.056 | 0.6 | 3 | 20 | 110 | 6 | 4 | 5 | 0.028 | 0.7 | 4 | 10 | 95 | 3 | 3 | 5 | 0.004 | 0.5 | 4 | 15 | 100 | 2 | 2 | 4 |
| 4 | 0.026 | 0.4 | 3 | 12 | 80 | 4 | 4 | 6 | 0.001 | 0.3 | 5 | 8 | 80 | 1 | 3 | 8 | 0.004 | 0.6 | 3 | 12 | 85 | 1 | 3 | 4 | 0.009 | 0.4 | 2 | 20 | 120 | 2 | 3 | 6 |
| 5 | 0.023 | 0.6 | 5 | 6 | 70 | 3 | 2 | 4 | 0.077 | 0.8 | 2 | 15 | 85 | 4 | 2 | 6 | 0.133 | 0.3 | 3 | 7 | 90 | 5 | 2 | 5 | 0.122 | 0.7 | 3 | 17 | 85 | 7 | 4 | 5 |
| 6 | 0.011 | 0.7 | 7 | 9 | 95 | 3 | 4 | 5 | 0.083 | 0.2 | 3 | 14 | 95 | 5 | 5 | 4 | 0.035 | 0.2 | 2 | 15 | 110 | 3 | 2 | 6 | 0.043 | 0.3 | 3 | 14 | 90 | 4 | 5 | 8 |
| Subsystem | Component Type | λ0ij | α1ij | α2ij | t1ij | t2ij | kij | cij | wij |
|---|---|---|---|---|---|---|---|---|---|
| i = 1 | 1 | 0.014 | 0.5 | 5 | 20 | 70 | 3 | 4 | 2 |
| 2 | 0.034 | 0.4 | 6 | 7 | 80 | 5 | 4 | 3 | |
| 3 | 0.014 | 0.2 | 4 | 10 | 110 | 2 | 3 | 6 | |
| 4 | 0.052 | 0.2 | 2 | 7 | 85 | 7 | 5 | 4 | |
| 5 | 0.048 | 0.3 | 3 | 16 | 85 | 8 | 2 | 6 | |
| 6 | 0.013 | 0.4 | 3 | 6 | 75 | 2 | 3 | 4 | |
| 7 | 0.021 | 0.1 | 4 | 5 | 100 | 3 | 4 | 2 | |
| 8 | 0.045 | 0.3 | 3 | 19 | 80 | 7 | 5 | 5 | |
| 9 | 0.023 | 0.3 | 5 | 18 | 80 | 4 | 5 | 8 | |
| 10 | 0.071 | 0.7 | 5 | 5 | 90 | 7 | 2 | 4 | |
| i = 2 | 1 | 0.027 | 0.5 | 3 | 8 | 100 | 3 | 5 | 3 |
| 2 | 0.017 | 0.4 | 4 | 16 | 105 | 2 | 3 | 3 | |
| 3 | 0.105 | 0.2 | 6 | 11 | 80 | 8 | 2 | 4 | |
| 4 | 0.019 | 0.8 | 3 | 19 | 80 | 3 | 2 | 6 | |
| 5 | 0.029 | 0.7 | 3 | 10 | 80 | 3 | 3 | 4 | |
| 6 | 0.049 | 0.5 | 4 | 19 | 80 | 6 | 4 | 5 | |
| 7 | 0.053 | 0.8 | 3 | 11 | 105 | 5 | 2 | 6 | |
| 8 | 0.046 | 0.1 | 5 | 14 | 90 | 7 | 5 | 8 | |
| 9 | 0.017 | 0.8 | 3 | 6 | 80 | 2 | 5 | 5 | |
| 10 | 0.023 | 0.7 | 6 | 10 | 80 | 3 | 4 | 3 | |
| i = 3 | 1 | 0.071 | 0.6 | 5 | 10 | 85 | 8 | 2 | 8 |
| 2 | 0.018 | 0.3 | 3 | 7 | 95 | 2 | 2 | 8 | |
| 3 | 0.022 | 0.6 | 3 | 15 | 85 | 2 | 5 | 2 | |
| 4 | 0.034 | 0.6 | 2 | 18 | 85 | 4 | 2 | 4 | |
| 5 | 0.021 | 0.5 | 2 | 12 | 70 | 2 | 5 | 8 | |
| 6 | 0.019 | 0.2 | 6 | 16 | 70 | 4 | 5 | 4 | |
| 7 | 0.071 | 0.6 | 4 | 15 | 95 | 8 | 3 | 7 | |
| 8 | 0.051 | 0.8 | 5 | 20 | 85 | 6 | 4 | 2 | |
| 9 | 0.063 | 0.6 | 5 | 11 | 105 | 7 | 5 | 6 | |
| 10 | 0.018 | 0.4 | 2 | 10 | 70 | 2 | 4 | 2 | |
| i = 4 | 1 | 0.021 | 0.8 | 6 | 6 | 105 | 2 | 2 | 7 |
| 2 | 0.014 | 0.1 | 4 | 14 | 90 | 3 | 3 | 6 | |
| 3 | 0.025 | 0.1 | 2 | 13 | 95 | 5 | 2 | 3 | |
| 4 | 0.032 | 0.2 | 4 | 20 | 105 | 5 | 2 | 5 | |
| 5 | 0.047 | 0.3 | 3 | 11 | 75 | 4 | 3 | 2 | |
| 6 | 0.017 | 0.1 | 4 | 10 | 80 | 3 | 2 | 7 | |
| 7 | 0.049 | 0.1 | 4 | 5 | 75 | 4 | 5 | 6 | |
| 8 | 0.051 | 0.3 | 5 | 17 | 85 | 8 | 3 | 8 | |
| 9 | 0.021 | 0.7 | 6 | 20 | 75 | 3 | 2 | 7 | |
| 10 | 0.043 | 0.2 | 5 | 20 | 95 | 7 | 4 | 6 | |
| i = 5 | 1 | 0.073 | 0.5 | 3 | 10 | 85 | 8 | 5 | 3 |
| 2 | 0.048 | 0.5 | 5 | 10 | 85 | 6 | 3 | 2 | |
| 3 | 0.022 | 0.2 | 4 | 6 | 105 | 3 | 2 | 3 | |
| 4 | 0.055 | 0.8 | 3 | 11 | 85 | 6 | 3 | 8 | |
| 5 | 0.054 | 0.2 | 6 | 11 | 95 | 8 | 5 | 7 | |
| 6 | 0.017 | 0.3 | 3 | 10 | 100 | 2 | 2 | 8 | |
| 7 | 0.032 | 0.6 | 5 | 6 | 95 | 4 | 3 | 2 | |
| 8 | 0.063 | 0.3 | 6 | 12 | 90 | 9 | 4 | 4 | |
| 9 | 0.051 | 0.7 | 6 | 10 | 90 | 6 | 4 | 8 | |
| 10 | 0.073 | 0.5 | 4 | 7 | 105 | 9 | 2 | 2 | |
| i = 6 | 1 | 0.016 | 0.8 | 2 | 19 | 95 | 2 | 2 | 6 |
| 2 | 0.027 | 0.1 | 3 | 9 | 90 | 5 | 3 | 8 | |
| 3 | 0.012 | 0.2 | 5 | 20 | 90 | 2 | 2 | 3 | |
| 4 | 0.009 | 0.2 | 6 | 8 | 70 | 2 | 4 | 7 | |
| 5 | 0.051 | 0.7 | 5 | 20 | 70 | 7 | 5 | 7 | |
| 6 | 0.029 | 0.5 | 4 | 19 | 110 | 4 | 4 | 3 | |
| 7 | 0.027 | 0.8 | 4 | 8 | 105 | 3 | 3 | 7 | |
| 8 | 0.017 | 0.6 | 4 | 15 | 75 | 2 | 4 | 7 | |
| 9 | 0.021 | 0.7 | 4 | 15 | 85 | 2 | 3 | 4 | |
| 10 | 0.031 | 0.1 | 6 | 5 | 85 | 4 | 3 | 5 | |
| i = 7 | 1 | 0.032 | 0.5 | 6 | 9 | 70 | 6 | 4 | 7 |
| 2 | 0.022 | 0.2 | 2 | 9 | 100 | 3 | 3 | 6 | |
| 3 | 0.053 | 0.4 | 6 | 13 | 90 | 7 | 4 | 5 | |
| 4 | 0.017 | 0.7 | 2 | 14 | 95 | 2 | 5 | 5 | |
| 5 | 0.029 | 0.3 | 6 | 13 | 105 | 4 | 3 | 3 | |
| 6 | 0.034 | 0.1 | 4 | 13 | 90 | 7 | 4 | 8 | |
| 7 | 0.037 | 0.6 | 4 | 16 | 70 | 5 | 4 | 6 | |
| 8 | 0.051 | 0.3 | 6 | 20 | 75 | 8 | 3 | 8 | |
| 9 | 0.024 | 0.7 | 4 | 16 | 95 | 2 | 2 | 4 | |
| 10 | 0.015 | 0.4 | 2 | 20 | 90 | 2 | 3 | 5 | |
| i = 8 | 1 | 0.018 | 0.4 | 5 | 10 | 85 | 2 | 3 | 3 |
| 2 | 0.023 | 0.7 | 4 | 20 | 75 | 3 | 3 | 6 | |
| 3 | 0.012 | 0.2 | 7 | 8 | 110 | 2 | 2 | 4 | |
| 4 | 0.024 | 0.2 | 4 | 20 | 80 | 5 | 3 | 2 | |
| 5 | 0.02 | 0.2 | 4 | 11 | 90 | 3 | 5 | 3 | |
| 6 | 0.058 | 0.6 | 6 | 19 | 95 | 7 | 2 | 5 | |
| 7 | 0.061 | 0.6 | 4 | 6 | 70 | 8 | 2 | 4 | |
| 8 | 0.024 | 0.3 | 4 | 20 | 85 | 3 | 2 | 6 | |
| 9 | 0.068 | 0.7 | 3 | 12 | 105 | 7 | 3 | 2 | |
| 10 | 0.073 | 0.5 | 5 | 14 | 105 | 8 | 2 | 7 | |
| i = 9 | 1 | 0.049 | 0.7 | 2 | 8 | 85 | 5 | 5 | 7 |
| 2 | 0.068 | 0.6 | 6 | 11 | 85 | 8 | 2 | 7 | |
| 3 | 0.024 | 0.6 | 6 | 15 | 70 | 4 | 3 | 5 | |
| 4 | 0.019 | 0.2 | 3 | 10 | 90 | 2 | 3 | 7 | |
| 5 | 0.024 | 0.7 | 6 | 10 | 80 | 3 | 5 | 5 | |
| 6 | 0.049 | 0.7 | 3 | 13 | 75 | 6 | 3 | 5 | |
| 7 | 0.035 | 0.2 | 3 | 20 | 110 | 6 | 5 | 5 | |
| 8 | 0.025 | 0.8 | 3 | 7 | 80 | 3 | 3 | 6 | |
| 9 | 0.049 | 0.8 | 4 | 5 | 75 | 6 | 2 | 8 | |
| 10 | 0.039 | 0.2 | 2 | 14 | 90 | 5 | 4 | 5 | |
| i = 10 | 1 | 0.028 | 0.1 | 5 | 20 | 90 | 7 | 4 | 2 |
| 2 | 0.048 | 0.4 | 2 | 5 | 90 | 5 | 4 | 2 | |
| 3 | 0.019 | 0.2 | 2 | 20 | 105 | 3 | 3 | 4 | |
| 4 | 0.015 | 0.2 | 4 | 12 | 70 | 2 | 3 | 4 | |
| 5 | 0.018 | 0.3 | 4 | 6 | 85 | 2 | 5 | 5 | |
| 6 | 0.019 | 0.8 | 6 | 14 | 95 | 2 | 2 | 3 | |
| 7 | 0.058 | 0.3 | 6 | 15 | 80 | 8 | 3 | 8 | |
| 8 | 0.016 | 0.1 | 4 | 6 | 110 | 2 | 4 | 4 | |
| 9 | 0.051 | 0.5 | 6 | 11 | 70 | 9 | 2 | 6 | |
| 10 | 0.065 | 0.3 | 5 | 10 | 100 | 8 | 2 | 3 | |
| i = 11 | 1 | 0.033 | 0.6 | 5 | 14 | 80 | 4 | 3 | 3 |
| 2 | 0.027 | 0.3 | 2 | 5 | 85 | 3 | 3 | 7 | |
| 3 | 0.035 | 0.4 | 4 | 15 | 90 | 5 | 2 | 8 | |
| 4 | 0.009 | 0.1 | 2 | 10 | 110 | 2 | 5 | 8 | |
| 5 | 0.038 | 0.2 | 6 | 17 | 85 | 6 | 2 | 3 | |
| 6 | 0.035 | 0.3 | 3 | 20 | 110 | 5 | 3 | 3 | |
| 7 | 0.029 | 0.1 | 6 | 11 | 75 | 6 | 2 | 3 | |
| 8 | 0.022 | 0.6 | 3 | 10 | 70 | 3 | 2 | 3 | |
| 9 | 0.058 | 0.6 | 4 | 18 | 90 | 7 | 2 | 8 | |
| 10 | 0.062 | 0.2 | 3 | 11 | 90 | 8 | 2 | 2 | |
| i = 12 | 1 | 0.022 | 0.6 | 4 | 14 | 105 | 2 | 5 | 6 |
| 2 | 0.041 | 0.2 | 5 | 18 | 85 | 7 | 2 | 6 | |
| 3 | 0.037 | 0.5 | 6 | 6 | 95 | 4 | 3 | 4 | |
| 4 | 0.023 | 0.5 | 6 | 6 | 105 | 2 | 3 | 4 | |
| 5 | 0.032 | 0.6 | 6 | 18 | 90 | 4 | 2 | 4 | |
| 6 | 0.059 | 0.7 | 3 | 6 | 80 | 7 | 5 | 3 | |
| 7 | 0.038 | 0.3 | 3 | 20 | 80 | 6 | 5 | 4 | |
| 8 | 0.054 | 0.4 | 4 | 20 | 90 | 8 | 2 | 7 | |
| 9 | 0.057 | 0.7 | 4 | 5 | 100 | 5 | 2 | 3 | |
| 10 | 0.015 | 0.5 | 2 | 8 | 85 | 2 | 3 | 8 | |
| i = 13 | 1 | 0.047 | 0.8 | 3 | 11 | 95 | 5 | 2 | 7 |
| 2 | 0.019 | 0.5 | 3 | 12 | 75 | 2 | 5 | 5 | |
| 3 | 0.053 | 0.3 | 3 | 10 | 80 | 7 | 4 | 8 | |
| 4 | 0.039 | 0.6 | 2 | 11 | 70 | 4 | 5 | 3 | |
| 5 | 0.019 | 0.8 | 5 | 17 | 85 | 2 | 3 | 2 | |
| 6 | 0.048 | 0.4 | 2 | 11 | 90 | 6 | 2 | 6 | |
| 7 | 0.023 | 0.1 | 3 | 7 | 90 | 3 | 4 | 8 | |
| 8 | 0.034 | 0.1 | 4 | 6 | 80 | 5 | 3 | 7 | |
| 9 | 0.072 | 0.3 | 3 | 11 | 85 | 9 | 2 | 8 | |
| 10 | 0.051 | 0.8 | 2 | 20 | 85 | 5 | 4 | 3 | |
| i = 14 | 1 | 0.019 | 0.5 | 3 | 16 | 75 | 2 | 5 | 5 |
| 2 | 0.038 | 0.6 | 2 | 7 | 85 | 4 | 5 | 7 | |
| 3 | 0.045 | 0.3 | 5 | 19 | 85 | 7 | 5 | 6 | |
| 4 | 0.033 | 0.2 | 6 | 9 | 95 | 4 | 2 | 7 | |
| 5 | 0.045 | 0.4 | 3 | 12 | 105 | 6 | 4 | 2 | |
| 6 | 0.024 | 0.2 | 3 | 9 | 80 | 3 | 4 | 5 | |
| 7 | 0.023 | 0.8 | 3 | 8 | 110 | 3 | 2 | 4 | |
| 8 | 0.048 | 0.3 | 3 | 14 | 90 | 7 | 3 | 3 | |
| 9 | 0.024 | 0.8 | 3 | 14 | 85 | 3 | 5 | 8 | |
| 10 | 0.041 | 0.2 | 2 | 6 | 70 | 6 | 4 | 7 | |
| i = 15 | 1 | 0.021 | 0.8 | 4 | 14 | 75 | 2 | 4 | 2 |
| 2 | 0.041 | 0.4 | 7 | 11 | 90 | 5 | 5 | 3 | |
| 3 | 0.043 | 0.5 | 3 | 6 | 70 | 5 | 4 | 8 | |
| 4 | 0.025 | 0.6 | 4 | 16 | 110 | 3 | 3 | 3 | |
| 5 | 0.012 | 0.2 | 2 | 18 | 95 | 2 | 5 | 6 | |
| 6 | 0.039 | 0.8 | 4 | 7 | 75 | 4 | 5 | 4 | |
| 7 | 0.047 | 0.3 | 5 | 9 | 90 | 5 | 2 | 6 | |
| 8 | 0.013 | 0.2 | 6 | 14 | 95 | 2 | 2 | 6 | |
| 9 | 0.015 | 0.6 | 4 | 18 | 90 | 2 | 4 | 4 | |
| 10 | 0.044 | 0.2 | 6 | 16 | 75 | 8 | 2 | 3 |
| Component Type 1 | Component Type 2 | Component Type 3 | Component Type 4 | |||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| i | λ0ij × 105 | α1ij | α2ij | t1ij | t2ij | kij | cij | wij | λ0ij × 105 | α1ij | α2ij | t1ij | t2ij | kij | cij | wij | λ0ij × 105 | α1ij | α2ij | t1ij | t2ij | kij | cij | wij | λ0ij × 105 | α1ij | α2ij | t1ij | t2ij | kij | cij | wij |
| 1 | 128 | 0.5 | 5 | 200 | 880 | 3 | 16 | 26 | 176 | 0.8 | 2 | 50 | 840 | 3 | 20 | 19 | 276 | 0.6 | 3 | 140 | 860 | 5 | 18 | 17 | 607 | 0.9 | 4 | 190 | 1060 | 8 | 21 | 24 |
| 2 | 195 | 0.7 | 6 | 120 | 790 | 4 | 14 | 20 | 78 | 0.3 | 4 | 90 | 870 | 2 | 21 | 23 | 92 | 0.7 | 2 | 100 | 1000 | 2 | 13 | 26 | 430 | 0.1 | 4 | 80 | 1010 | 9 | 19 | 18 |
| 3 | 419 | 0.6 | 3 | 220 | 1050 | 7 | 20 | 24 | 473 | 0.8 | 5 | 150 | 1090 | 7 | 15 | 17 | 368 | 0.2 | 6 | 80 | 720 | 8 | 16 | 26 | 455 | 0.8 | 2 | 240 | 1010 | 7 | 17 | 27 |
| 4 | 480 | 0.5 | 4 | 90 | 850 | 7 | 19 | 22 | 388 | 0.7 | 6 | 120 | 990 | 6 | 17 | 24 | 394 | 0.9 | 7 | 80 | 750 | 8 | 20 | 17 | 159 | 0.1 | 8 | 90 | 780 | 5 | 19 | 21 |
| 5 | 495 | 0.7 | 6 | 80 | 820 | 8 | 14 | 19 | 173 | 0.5 | 7 | 70 | 990 | 3 | 18 | 22 | 97 | 0.5 | 7 | 150 | 900 | 2 | 19 | 19 | 88 | 0.9 | 5 | 190 | 840 | 2 | 18 | 24 |
| 6 | 101 | 0.2 | 6 | 150 | 850 | 3 | 15 | 23 | 106 | 0.1 | 2 | 210 | 940 | 4 | 13 | 26 | 194 | 0.2 | 4 | 70 | 980 | 4 | 20 | 19 | 68 | 0.2 | 6 | 210 | 930 | 2 | 14 | 22 |
| 7 | 68 | 0.3 | 7 | 180 | 830 | 2 | 14 | 26 | 245 | 0.5 | 7 | 160 | 800 | 5 | 15 | 18 | 241 | 0.2 | 8 | 240 | 760 | 8 | 21 | 23 | 455 | 0.9 | 3 | 100 | 820 | 7 | 14 | 22 |
| 8 | 194 | 0.2 | 4 | 220 | 1070 | 5 | 18 | 23 | 189 | 0.2 | 5 | 220 | 920 | 5 | 14 | 26 | 205 | 0.3 | 4 | 70 | 870 | 4 | 16 | 20 | 190 | 0.3 | 4 | 90 | 1100 | 4 | 20 | 25 |
| 9 | 265 | 0.8 | 6 | 50 | 780 | 5 | 21 | 27 | 415 | 0.8 | 5 | 240 | 830 | 7 | 15 | 19 | 293 | 0.7 | 3 | 210 | 1000 | 5 | 16 | 26 | 429 | 0.3 | 5 | 250 | 820 | 9 | 20 | 18 |
| 10 | 99 | 0.1 | 2 | 170 | 1050 | 4 | 14 | 18 | 597 | 0.6 | 4 | 90 | 840 | 9 | 15 | 25 | 213 | 0.7 | 6 | 150 | 910 | 4 | 21 | 23 | 452 | 0.2 | 4 | 120 | 990 | 8 | 18 | 25 |
| C | W | nmax,i | ρi (t) | |
|---|---|---|---|---|
| First example | 50 | 70 | 6 | 0.99 |
| Second example | 310 | 400 | 6 | 0.99 |
| Third example | 480 | 519 | 6 | 0.99 |



| System Characteristics | |||
|---|---|---|---|
| Iteration Number | Reliability | Cost | Weight |
| 1 | 0.9612 | 45 | 68 |
| 2 | 0.9541 | 37 | 70 |
| 3 | 0.9284 | 45 | 70 |
| 4 | 0.9578 | 39 | 68 |
| 5 | 0.9692 | 48 | 69 |
| 6 | 0.9702 | 45 | 70 |
| 7 | 0.9619 | 49 | 66 |
| 8 | 0.9662 | 46 | 68 |
| 9 | 0.9695 | 45 | 70 |
| 10 | 0.9652 | 50 | 70 |
| 11 | 0.9673 | 49 | 68 |
| 12 | 0.9669 | 49 | 68 |
| 13 | 0.9376 | 39 | 68 |
| 14 | 0.9689 | 48 | 69 |
| 15 | 0.934 | 47 | 66 |
| 16 | 0.9624 | 38 | 68 |
| 17 | 0.9549 | 47 | 65 |
| 18 | 0.9577 | 45 | 70 |
| 19 | 0.9315 | 46 | 69 |
| 20 | 0.9562 | 46 | 68 |
| System Characteristics | |||
|---|---|---|---|
| Iteration Number | Reliability | Cost | Weight |
| 1 | 0.9626 | 200 | 265 |
| 2 | 0.9506 | 306 | 367 |
| 3 | 0.9614 | 259 | 302 |
| 4 | 0.9557 | 251 | 380 |
| 5 | 0.9425 | 259 | 352 |
| 6 | 0.9584 | 250 | 337 |
| 7 | 0.9397 | 271 | 372 |
| 8 | 0.9574 | 303 | 319 |
| 9 | 0.9584 | 249 | 339 |
| 10 | 0.9351 | 242 | 325 |
| 11 | 0.9337 | 235 | 311 |
| 12 | 0.9384 | 237 | 298 |
| 13 | 0.9565 | 219 | 393 |
| 14 | 0.9643 | 248 | 333 |
| 15 | 0.9488 | 236 | 285 |
| 16 | 0.9707 | 272 | 282 |
| 17 | 0.946 | 240 | 323 |
| 18 | 0.9524 | 277 | 384 |
| 19 | 0.9493 | 302 | 384 |
| 20 | 0.9628 | 260 | 343 |
| System Characteristics | |||
|---|---|---|---|
| Iteration Number | Reliability | Cost | Weight |
| 1 | 0.9866 | 458 | 519 |
| 2 | 0.9865 | 448 | 518 |
| 3 | 0.9881 | 466 | 517 |
| 4 | 0.9846 | 478 | 518 |
| 5 | 0.9896 | 454 | 514 |
| 6 | 0.9894 | 453 | 516 |
| 7 | 0.9889 | 469 | 513 |
| 8 | 0.9881 | 469 | 519 |
| 9 | 0.9886 | 464 | 509 |
| 10 | 0.9894 | 453 | 516 |
| 11 | 0.9889 | 469 | 513 |
| 12 | 0.9869 | 471 | 512 |
| 13 | 0.9864 | 429 | 518 |
| 14 | 0.9896 | 454 | 514 |
| 15 | 0.9868 | 451 | 519 |
| 16 | 0.9891 | 468 | 510 |
| 17 | 0.9869 | 424 | 509 |
| 18 | 0.9896 | 467 | 517 |
| 19 | 0.9896 | 461 | 519 |
| 20 | 0.9894 | 453 | 516 |
References
- Ardakan, M.A.; Hamadani, A.Z. Reliability optimization of series–parallel systems with mixed redundancy strategy in subsystems. Reliab. Eng. Syst. Saf. 2014, 130, 132–139. [Google Scholar] [CrossRef]
- Ebeling, C.E. An Introduction to Reliability and Maintainability Engineering; Tata McGraw-Hill Education: New York, NY, USA, 2004. [Google Scholar]
- Hsieh, T.J. Hierarchical redundancy allocation for multi-level reliability systems employing a bacterial-inspired evolutionary algorithm. Inf. Sci. 2014, 288, 174–193. [Google Scholar] [CrossRef]
- Abouei Ardakan, M.; Mirzaei, Z.; Zeinal Hamadani, A.; Elsayed, E.A. Reliability Optimization by Considering Time-Dependent Reliability for Components. Qual. Reliab. Eng. Int. 2017, 33, 1641–1654. [Google Scholar] [CrossRef]
- Gupta, R.K.; Bhunia, A.K.; Roy, D. A GA based penalty function technique for solving constrained redundancy allocation problem of series system with interval valued reliability of components. J. Comput. Appl. Math. 2009, 232, 275–284. [Google Scholar] [CrossRef]
- Mellal, M.A.; Zio, E. System reliability-redundancy allocation by evolutionary computation. In Proceedings of the 2017 2nd International Conference on System Reliability and Safety (ICSRS) 2017, Milan, Italy, 20–22 December 2017; pp. 15–19. [Google Scholar]
- Coit, D.W. Cold-standby redundancy optimization for nonrepairable systems. Iie Trans. 2001, 33, 471–478. [Google Scholar] [CrossRef]
- Zhao, J.; Zeng, S.; Guo, J.; Yang, C. Redundancy allocation with non-identical component and uncertainty. In Proceedings of the 2015 Annual Reliability and Maintainability Symposium (RAMS) 2015, Palm Harbor, FL, USA, 26–29 January 2015; pp. 1–6. [Google Scholar]
- Liang, Y.C.; Smith, A.E. An ant colony optimization algorithm for the redundancy allocation problem (RAP). IEEE Trans. Reliab. 2004, 53, 417–423. [Google Scholar] [CrossRef]
- Onishi, J.; Kimura, S.; James, R.J.; Nakagawa, Y. Solving the redundancy allocation problem with a mix of components using the improved surrogate constraint method. IEEE Trans. Reliab. 2007, 56, 94–101. [Google Scholar] [CrossRef]
- Caserta, M.; Voß, S. An exact algorithm for the reliability redundancy allocation problem. Eur. J. Oper. Res. 2015, 244, 110–116. [Google Scholar] [CrossRef]
- Ramirez-Marquez, J.E.; Coit, D.W. A heuristic for solving the redundancy allocation problem for multi-state series-parallel systems. Reliab. Eng. Syst. Saf. 2004, 83, 341–349. [Google Scholar] [CrossRef]
- Sharma, V.K.; Agarwal, M.; Sen, K. Reliability evaluation and optimal design in heterogeneous multi-state series-parallel systems. Inf. Sci. 2011, 181, 362–378. [Google Scholar] [CrossRef]
- Lai, C.M.; Yeh, W.C. Two-stage simplified swarm optimization for the redundancy allocation problem in a multi-state bridge system. Reliab. Eng. Syst. Saf. 2016, 156, 148–158. [Google Scholar] [CrossRef]
- Li, Y.; Zio, E. A quantum-inspired evolutionary approach for non-homogeneous redundancy allocation in series-parallel multi-state systems. In Proceedings of the 2014 10th International Conference on Reliability, Maintainability and Safety (ICRMS) 2014, Guangzhou, China, 6–8 August 2014; pp. 526–532. [Google Scholar]
- Wang, Y.; Li, L. A PSO algorithm for constrained redundancy allocation in multi-state systems with bridge topology. Comput. Ind. Eng. 2014, 68, 13–22. [Google Scholar] [CrossRef]
- Hsieh, T.J.; Yeh, W.C. Penalty guided bees search for redundancy allocation problems with a mix of components in series–parallel systems. Comput. Oper. Res. 2012, 39, 2688–2704. [Google Scholar] [CrossRef]
- Garg, H.; Rani, M.; Sharma, S.P.; Vishwakarma, Y. Bi-objective optimization of the reliability-redundancy allocation problem for series-parallel system. J. Manuf. Syst. 2014, 33, 335–347. [Google Scholar] [CrossRef]
- Zhang, E.; Chen, Q. Multi-objective reliability redundancy allocation in an interval environment using particle swarm optimization. Reliab. Eng. Syst. Saf. 2016, 145, 83–92. [Google Scholar] [CrossRef]
- Guo, J.; Wang, Z.; Zheng, M.; Wang, Y. Uncertain multiobjective redundancy allocation problem of repairable systems based on artificial bee colony algorithm. Chin. J. Aeronaut. 2014, 27, 1477–1487. [Google Scholar] [CrossRef]
- Kulturel-Konak, S.; Coit, D.W. Determination of Pruned Pareto sets for the multi-objective system redundancy allocation problem. In Proceedings of the 2007 IEEE Symposium on Computational Intelligence in Multi-Criteria Decision-Making 2007, Honolulu, HI, USA, 1–5 April 2007; pp. 390–394. [Google Scholar]
- Mariano, C.H.; Kuri-Morales, A.F. Complex componential approach for redundancy allocation problem solved by simulation-optimization framework. J. Intell. Manuf. 2014, 25, 661–680. [Google Scholar] [CrossRef]
- Cao, D.; Murat, A.; Chinnam, R.B. Efficient exact optimization of multi-objective redundancy allocation problems in series-parallel systems. Reliab. Eng. Syst. Saf. 2013, 111, 154–163. [Google Scholar] [CrossRef]
- Sun, M.X.; Li, Y.F.; Zio, E. On the optimal redundancy allocation for multi-state series–parallel systems under epistemic uncertainty. Reliab. Eng. Syst. Saf. 2019, 192, 106019. [Google Scholar] [CrossRef]
- Valaei, M.R.; Behnamian, J. Allocation and sequencing in 1-out-of-N heterogeneous cold-standby systems: Multi-objective harmony search with dynamic parameters tuning. Reliab. Eng. Syst. Saf. 2017, 157, 78–86. [Google Scholar] [CrossRef]
- Bei, X.; Chatwattanasiri, N.; Coit, D.W.; Zhu, X. Combined redundancy allocation and maintenance planning using a two-stage stochastic programming model for multiple component systems. IEEE Trans. Reliab. 2017, 66, 950–962. [Google Scholar] [CrossRef]
- Dobani, E.R.; Ardakan, M.A.; Davari-Ardakani, H.; Juybari, M.N. RRAP-CM: A new reliability-redundancy allocation problem with heterogeneous components. Reliab. Eng. Syst. Saf. 2019, 191, 106563. [Google Scholar] [CrossRef]
- Hsieh, T.J. Component mixing with a cold standby strategy for the redundancy allocation problem. Reliab. Eng. Syst. Saf. 2021, 206, 107290. [Google Scholar] [CrossRef]
- Bhattacharyee, N.; Kumar, N.; Mahato, S.K.; Bhunia, A.K. Development of a blended particle swarm optimization to optimize mission design life of a series–parallel reliable system with time dependent component reliabilities in imprecise environments. Soft Comput. 2021, 25, 11745–11761. [Google Scholar] [CrossRef]
- Wang, W.; Wu, Z.; Xiong, J.; Xu, Y. Redundancy optimization of cold-standby systems under periodic inspection and maintenance. Reliab. Eng. Syst. Saf. 2018, 180, 394–402. [Google Scholar] [CrossRef]
- Mellal, M.A.; Zio, E. System reliability-redundancy optimization with cold-standby strategy by an enhanced nest cuckoo optimization algorithm. Reliab. Eng. Syst. Saf. 2020, 201, 106973. [Google Scholar] [CrossRef]
- Yeh, W.C.; Su, Y.Z.; Gao, X.Z.; Hu, C.F.; Wang, J.; Huang, C.L. Simplified swarm optimization for bi-objection active reliability redundancy allocation problems. Appl. Soft Comput. 2021, 106, 107321. [Google Scholar] [CrossRef]
- Yeh, W.C. BAT-based algorithm for finding all Pareto solutions of the series-parallel redundancy allocation problem with mixed components. Reliab. Eng. Syst. Saf. 2022, 228, 108795. [Google Scholar] [CrossRef]
- Kundu, P. A multi-objective reliability-redundancy allocation problem with active redundancy and interval type-2 fuzzy parameters. Oper. Res. 2021, 21, 2433–2458. [Google Scholar] [CrossRef]
- Coit, D.W. Maximization of system reliability with a choice of redundancy strategies. IIE Trans. 2003, 35, 535–543. [Google Scholar] [CrossRef]
- Kong, X.; Gao, L.; Ouyang, H.; Li, S. Solving the redundancy allocation problem with multiple strategy choices using a new simplified particle swarm optimization. Reliab. Eng. Syst. Saf. 2015, 144, 147–158. [Google Scholar] [CrossRef]
- Tavakkoli-Moghaddam, R.; Safari, J. A new mathematical model for a redundancy allocation problem with mixing components redundant and choice of redundancy strategies. Appl. Math. Sci. 2007, 45, 2221–2230. [Google Scholar]
- Qiu, X.; Ali, S.; Yue, T.; Zhang, L. Reliability-redundancy-location allocation with maximum reliability and minimum cost using search techniques. Inf. Softw. Technol. 2017, 82, 36–54. [Google Scholar] [CrossRef]
- Kim, H. Optimal reliability design of a system with k-out-of-n subsystems considering redundancy strategies. Reliab. Eng. Syst. Saf. 2017, 167, 572–582. [Google Scholar] [CrossRef]
- Kim, H.; Kim, P. Reliability–redundancy allocation problem considering optimal redundancy strategy using parallel genetic algorithm. Reliab. Eng. Syst. Saf. 2017, 159, 153–160. [Google Scholar] [CrossRef]
- Kim, H. Parallel genetic algorithm with a knowledge base for a redundancy allocation problem considering the sequence of heterogeneous components. Expert Syst. Appl. 2018, 113, 328–338. [Google Scholar] [CrossRef]
- Wang, W.; Lin, M.; Fu, Y.; Luo, X.; Chen, H. Multi-objective optimization of reliability-redundancy allocation problem for multi-type production systems considering redundancy strategies. Reliab. Eng. Syst. Saf. 2020, 193, 106681. [Google Scholar] [CrossRef]
- Li, X.Y.; Li, Y.F.; Huang, H.Z. Redundancy allocation problem of phased-mission system with non-exponential components and mixed redundancy strategy. Reliab. Eng. Syst. Saf. 2020, 199, 106903. [Google Scholar] [CrossRef]
- Gholinezhad, H.; Hamadani, A.Z. A new model for the redundancy allocation problem with component mixing and mixed redundancy strategy. Reliab. Eng. Syst. Saf. 2017, 164, 66–73. [Google Scholar] [CrossRef]
- Ardakan, M.A.; Hamadani, A.Z.; Alinaghian, M. Optimizing bi-objective redundancy allocation problem with a mixed redundancy strategy. ISA transactions 2015, 55, 116–128. [Google Scholar] [CrossRef] [PubMed]
- Peiravi, A.; Karbasian, M.; Ardakan, M.A.; Coit, D.W. Reliability optimization of series-parallel systems with K-mixed redundancy strategy. Reliab. Eng. Syst. Saf. 2019, 183, 17–28. [Google Scholar] [CrossRef]
- Peiravi, A.; Ardakan, M.A.; Zio, E. A new Markov-based model for reliability optimization problems with mixed redundancy strategy. Reliab. Eng. Syst. Saf. 2020, 201, 106987. [Google Scholar] [CrossRef]
- Ouyang, Z.; Liu, Y.; Ruan, S.J.; Jiang, T. An improved particle swarm optimization algorithm for reliability-redundancy allocation problem with mixed redundancy strategy and heterogeneous components. Reliab. Eng. Syst. Saf. 2019, 181, 62–74. [Google Scholar] [CrossRef]
- Reihaneh, M.; Ardakan, M.A.; Eskandarpour, M. An exact algorithm for the redundancy allocation problem with heterogeneous components under the mixed redundancy strategy. Eur. J. Oper. Res. 2022, 297, 1112–1125. [Google Scholar] [CrossRef]
- Azizi, S.; Mohammadi, M. Strategy selection for multi-objective redundancy allocation problem in a k-out-of-n system considering the mean time to failure. Opsearch 2023, 60, 1021–1044. [Google Scholar] [CrossRef]
- Kim, H. Parallel Genetic Algorithm with Knowledge Archives for the Redundancy Allocation Problem in a Mixed Redundant System. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4283392 (accessed on 22 November 2022).
- Zhang, J.; Lv, H.; Hou, J. A novel general model for RAP and RRAP optimization of k-out-of-n: G systems with mixed redundancy strategy. Reliab. Eng. Syst. Saf. 2023, 229, 108843. [Google Scholar] [CrossRef]
- Yeh, W.C. Solving cold-standby reliability redundancy allocation problems using a new swarm intelligence algorithm. Appl. Soft Comput. 2019, 83, 105582. [Google Scholar] [CrossRef]
- Yeh, W.C. A novel boundary swarm optimization method for reliability redundancy allocation problems. Reliab. Eng. Syst. Saf. 2019, 192, 106060. [Google Scholar] [CrossRef]
- Huang, X.; Coolen, F.P.; Coolen-Maturi, T. A heuristic survival signature based approach for reliability-redundancy allocation. Reliab. Eng. Syst. Saf. 2019, 185, 511–517. [Google Scholar] [CrossRef]
- Lins, I.D.; Droguett, E.L. Redundancy allocation problems considering systems with imperfect repairs using multi-objective genetic algorithms and discrete event simulation. Simul. Model. Pract. Theory 2011, 19, 362–381. [Google Scholar] [CrossRef]
- Marseguerra, M.; Zio, E.; Podofillini, L.; Coit, D.W. Optimal design of reliable network systems in presence of uncertainty. IEEE Trans. Reliab. 2005, 54, 243–253. [Google Scholar] [CrossRef]
- Monalisa, P.; Satchidananda, D.; Kumar, J.A. Multi-objective artificial bee colony algorithm in redundancy allocation problem. Int. J. Adv. Intell. Paradig. 2023, 25, 24–50. [Google Scholar] [CrossRef]
- Maji, A.; Duary, A.; Bhunia, A.K.; Mondal, S.K. A Redundancy Allocation Problem for a Series-Parallel System with Multiple Choice Technologies Considering Fuzzy Sense with Ambiguity and Vagueness; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar] [CrossRef]
- Yeh, C.T.; Fiondella, L. Optimal redundancy allocation to maximize multi-state computer network reliability subject to correlated failures. Reliab. Eng. Syst. Saf. 2017, 166, 138–150. [Google Scholar] [CrossRef]
- Li, Y.F.; Zhang, H. The methods for exactly solving redundancy allocation optimization for multi-state series–parallel systems. Reliab. Eng. Syst. Saf. 2022, 221, 108340. [Google Scholar] [CrossRef]
- Xu, Y.; Pi, D.; Yang, S.; Chen, Y. A novel discrete bat algorithm for heterogeneous redundancy allocation of multi-state systems subject to probabilistic common-cause failure. Reliab. Eng. Syst. Saf. 2021, 208, 107338. [Google Scholar] [CrossRef]
- Li, J.; Wang, G.; Zhou, H.; Chen, H. Redundancy allocation optimization for multi-state system with hierarchical performance requirements. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2022. [Google Scholar] [CrossRef]
- Blokus, A. Multistate System Reliability with Dependencies; Academic Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Yingkui, G.; Jing, L. Multi-state system reliability: A new and systematic review. Procedia Eng. 2012, 29, 531–536. [Google Scholar] [CrossRef]
- Paramanik, R.; Mahato, S.K.; Bhattacharyee, N. Optimization of Redundancy Allocation Problem Using Quantum Particle Swarm Optimization Algorithm Under Uncertain Environment. In Advances in Reliability, Failure and Risk Analysis; Springer Nature: Singapore, 2023; pp. 177–197. [Google Scholar]
- Coit, D.W.; Zio, E. The evolution of system reliability optimization. Reliab. Eng. Syst. Saf. 2019, 192, 106259. [Google Scholar] [CrossRef]
- Chern, M.S. On the computational complexity of reliability redundancy allocation in a series system. Oper. Res. Lett. 1992, 11, 309–315. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Scheidegger, A.; Leitao, J.P.; Scholten, L. Statistical failure models for water distribution pipes–A review from a unified perspective. Water Res. 2015, 83, 237–247. [Google Scholar] [CrossRef]
- Romaniuk, M.; Hryniewicz, O. Estimation of maintenance costs of a pipeline for a U-shaped hazard rate function in the imprecise setting. Eksploat. I Niezawodn. 2020, 22, 352–362. [Google Scholar] [CrossRef]
- Al-nefaie, A.H.; Ragab, I.E. A Novel Lifetime Model with A Bathtub-Shaped Hazard Rate: Properties & Applications. J. Appl. Sci. Eng. 2022, 26, 413–421. [Google Scholar]
- Bai, B.; Li, Z.; Wu, Q.; Zhou, C.; Zhang, J. Fault data screening and failure rate prediction framework-based bathtub curve on industrial robots. Ind. Robot. Int. J. Robot. Res. Appl. 2020, 47, 867–880. [Google Scholar] [CrossRef]
- Ahsan, S.; Lemma, T.A.; Gebremariam, M.A. Reliability analysis of gas turbine engine by means of bathtub-shaped failure rate distribution. Process Saf. Prog. 2020, 39, e12115. [Google Scholar] [CrossRef]





| Level | nPop | rc | rm | |
|---|---|---|---|---|
| 1 | 100 | 0.2 | 0.2 | |
| 2 | 200 | 0.3 | 0.3 | |
| 3 | 300 | 0.4 | 0.4 | |
| Best level | Example 1 | 200 | 0.4 | 0.2 |
| Example 2 | 300 | 0.3 | 0.3 | |
| Example 3 | 200 | 0.4 | 0.3 |
| System Characteristics | ||||
|---|---|---|---|---|
| First Example | Reliability | Cost | Weight | |
| Minimum | 0.9284 | 37 | 65 | |
| Maximum | 0.9702 | 50 | 70 | |
| First example | Average | 0.9571 | 45.15 | 68.4 |
| Standard deviation | 0.0131 | 3.7852 | 1.4283 | |
| Coefficient of variation | 0.0137 | 0.0838 | 0.0209 | |
| Minimum | 0.9337 | 200 | 265 | |
| Maximum | 0.9707 | 306 | 393 | |
| Second example | Average | 0.9522 | 255.8 | 334.7 |
| Standard deviation | 0.0102 | 26.5643 | 36.5392 | |
| Coefficient of variation | 0.0107 | 0.1038 | 0.1092 | |
| Minimum | 0.9846 | 424 | 509 | |
| Maximum | 0.9896 | 478 | 519 | |
| Third example | Average | 0.9882 | 457.95 | 515.3 |
| Standard deviation | 0.0014 | 13.1813 | 3.2879 | |
| Coefficient of variation | 0.0015 | 0.0288 | 0.0064 | |
| Subsystem | With Time Dependence | Without Time Dependence | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| zi | nAi | nSi | Red. Strategy | Reliability | zi | nAi | nSi | Red. Strategy | Reliability | |
| 1 | 3 | 2 | 3 | Mixed | 0.9938 | 2 | 2 | 1 | Mixed | 0.9994 |
| 2 | 1 | 1 | 1 | Standby | 0.9977 | 1 | 1 | 1 | Standby | 0.9987 |
| 3 | 4 | 2 | 0 | Active | 0.9939 | 4 | 1 | 1 | Standby | 0.9986 |
| 4 | 2 | 1 | 1 | Standby | 0.9909 | 4 | 2 | 1 | Mixed | 0.9981 |
| 5 | 1 | 2 | 2 | Mixed | 0.9959 | 1 | 1 | 2 | Standby | 0.9953 |
| 6 | 1 | 1 | 1 | Standby | 0.9977 | 1 | 1 | 1 | Standby | 0.9980 |
| System reliability System cost System weight | 0.9702 45 70 | 0.9877 37 70 | ||||||||
| Subsystem | With Time Dependence | Without Time Dependence | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| zi | nAi | nSi | Red. Strategy | Reliability | zi | nAi | nSi | Red. Strategy | Reliability | |
| 1 | 1 | 3 | 1 | Mixed | 0.99997 | 7 | 5 | 1 | Mixed | 0.99788 |
| 2 | 2 | 2 | 1 | Mixed | 0.99835 | 9 | 4 | 2 | Mixed | 0.99938 |
| 3 | 3 | 2 | 2 | Mixed | 0.99999 | 3 | 1 | 1 | Standby | 0.99977 |
| 4 | 9 | 3 | 3 | Mixed | 0.99912 | 6 | 2 | 3 | Mixed | 0.99995 |
| 5 | 9 | 2 | 3 | Mixed | 0.99428 | 3 | 2 | 2 | Mixed | 0.99876 |
| 6 | 8 | 2 | 2 | Mixed | 0.99916 | 1 | 3 | 2 | Mixed | 0.99888 |
| 7 | 10 | 3 | 2 | Mixed | 0.99968 | 4 | 3 | 3 | Mixed | 0.99755 |
| 8 | 5 | 2 | 3 | Mixed | 0.99717 | 3 | 3 | 4 | Mixed | 0.99764 |
| 9 | 8 | 2 | 3 | Mixed | 0.99796 | 7 | 4 | 1 | Mixed | 0.99554 |
| 10 | 6 | 3 | 3 | Mixed | 0.99567 | 5 | 3 | 3 | Mixed | 0.99686 |
| 11 | 1 | 2 | 3 | Mixed | 0.99761 | 1 | 2 | 2 | Mixed | 0.99853 |
| 12 | 1 | 1 | 3 | Standby | 0.99979 | 10 | 3 | 2 | Mixed | 0.99915 |
| 13 | 2 | 2 | 3 | Mixed | 0.99877 | 2 | 2 | 3 | Mixed | 0.99921 |
| 14 | 9 | 2 | 3 | Mixed | 0.99365 | 8 | 3 | 3 | Mixed | 0.99493 |
| 15 | 5 | 2 | 3 | Mixed | 0.99914 | 5 | 2 | 3 | Mixed | 0.99921 |
| System reliability System cost System weight | 0.9707 272 282 | 0.9736 254 335 | ||||||||
| Subsystem | With Time Dependence | Without Time Dependence | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| zi | nAi | nSi | Red. Strategy | Reliability | zi | nAi | nSi | Red. Strategy | Reliability | |
| 1 | 3 | 2 | 1 | Mixed | 0.99956 | 3 | 2 | 1 | Mixed | 0.99980 |
| 2 | 1 | 2 | 1 | Mixed | 0.99928 | 4 | 2 | 1 | Mixed | 0.99999 |
| 3 | 2 | 2 | 1 | Mixed | 0.99950 | 2 | 2 | 1 | Mixed | 0.99966 |
| 4 | 3 | 2 | 1 | Mixed | 0.99957 | 4 | 1 | 1 | Standby | 0.99976 |
| 5 | 1 | 1 | 1 | Standby | 0.99740 | 1 | 2 | 1 | Mixed | 0.99987 |
| 6 | 3 | 2 | 1 | Mixed | 0.99918 | 3 | 2 | 1 | Mixed | 0.99982 |
| 7 | 2 | 2 | 1 | Mixed | 0.99923 | 3 | 2 | 0 | Active | 0.99999 |
| 8 | 3 | 2 | 1 | Mixed | 0.99924 | 1 | 2 | 1 | Mixed | 0.99998 |
| 9 | 2 | 1 | 1 | Mixed | 0.99755 | 4 | 2 | 1 | Mixed | 0.99999 |
| 10 | 1 | 2 | 1 | Mixed | 0.99908 | 1 | 1 | 1 | Standby | 0.99981 |
| System reliability System cost System weight | 0.9896 454 514 | 0.9987 480 517 | ||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zio, E.; Gholinezhad, H. Redundancy Allocation of Components with Time-Dependent Failure Rates. Mathematics 2023, 11, 3534. https://doi.org/10.3390/math11163534
Zio E, Gholinezhad H. Redundancy Allocation of Components with Time-Dependent Failure Rates. Mathematics. 2023; 11(16):3534. https://doi.org/10.3390/math11163534
Chicago/Turabian StyleZio, Enrico, and Hadi Gholinezhad. 2023. "Redundancy Allocation of Components with Time-Dependent Failure Rates" Mathematics 11, no. 16: 3534. https://doi.org/10.3390/math11163534
APA StyleZio, E., & Gholinezhad, H. (2023). Redundancy Allocation of Components with Time-Dependent Failure Rates. Mathematics, 11(16), 3534. https://doi.org/10.3390/math11163534