
A Distributed Algorithm for the Assignment of the Laplacian Spectrum for Path Graphs

{kind=link}
Abstract
1. Introduction
Notation
2. Motivating Examples
2.1. Collaborative Multi-Agent Systems and Consensus Networks
2.2. Some Examples of Applications Scenarios
2.3. Problem Statement
3. Problem Solution
3.1. Preliminary Results on n = 2 and n = 3
3.2. A Recursive General Solution When ℓ Is a Leaf
| Algorithm 1: Computation of the edge weights as the solution of the Problem Statement (Section 2.3). |
Data: , Result: , initialization: , , , for all  |
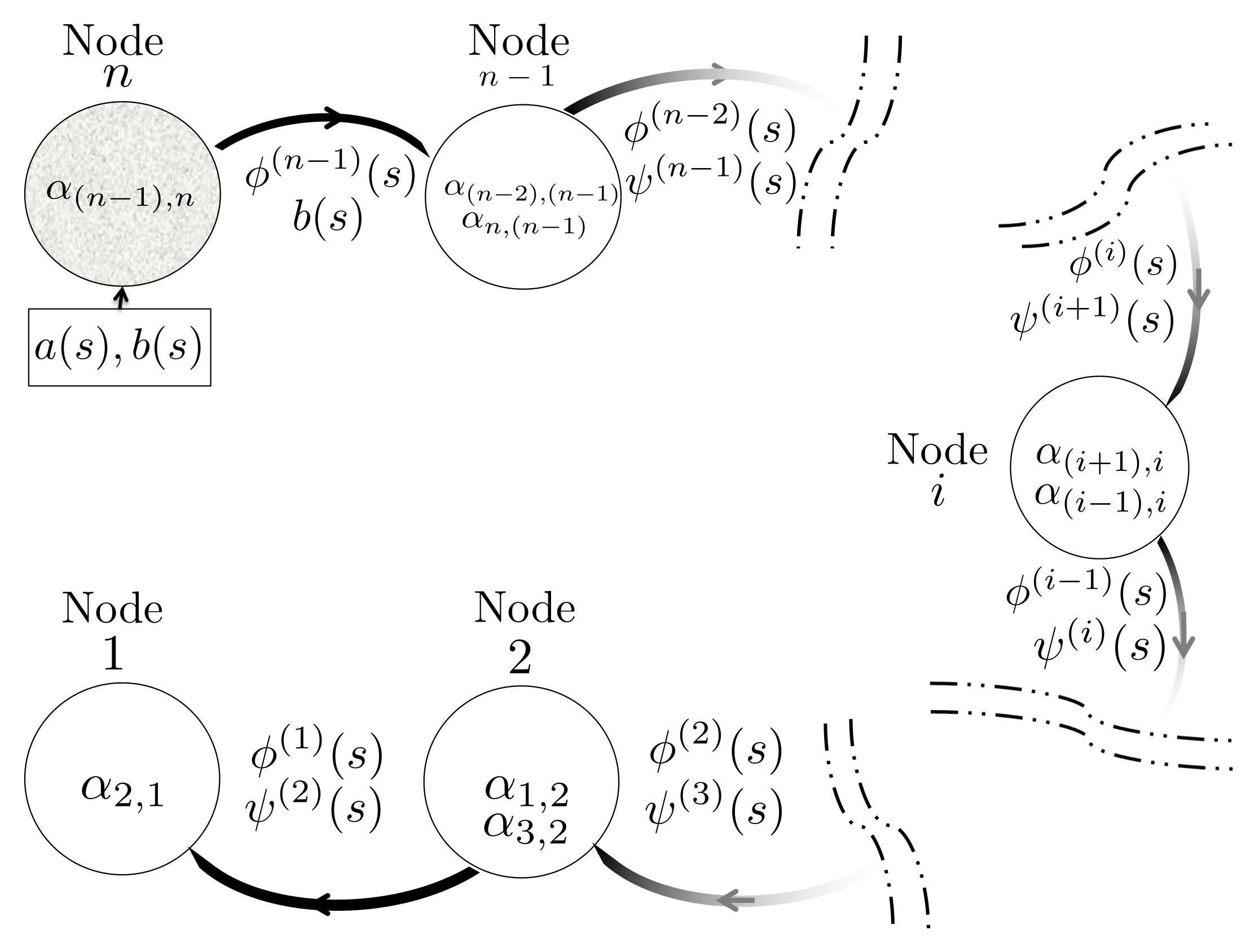
4. A Distributed Implementation of Algorithm 1
- Compute the polynomials and starting from the desired zeros and set them as reference polynomials.
- Compute:to obtain the value of its own weight and the polynomial through the computation of its coefficients:
- Transmit , and to node .
- Retrieve and by performing the following elaboration:
- Then:
- Transmit , and to node .
- Retrieve and by performing the following elaboration:
- Then:
- Transmit , and to node .
5. A Final Remark on the Solution of Algorithm 1
6. An Illustrative Example
7. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bullo, F. Lectures on Network Systems; Kindle Direct Publishing: Seattle, DC, USA, 2020; Volume 1. [Google Scholar]
- Mullender, S. Distributed Systems; ACM: New York, NY, USA, 1990. [Google Scholar]
- Qu, Z. Cooperative Control of Dynamical Systems: Applications to Autonomous Vehicles; Springer: Berlin/Heidelberg, Germany, 2009; Volume 3. [Google Scholar]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Bullo, F. Lectures on Network Systems, 1.6 ed.; Kindle Direct Publishing: Seattle, DC, USA, 2022. [Google Scholar]
- Gao, S.; Tsang, I.W.H.; Chia, L.T. Laplacian sparse coding, hypergraph laplacian sparse coding, and applications. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 92–104. [Google Scholar] [CrossRef] [PubMed]
- Ng, A.; Jordan, M.; Weiss, Y. On spectral clustering: Analysis and an algorithm. In NIPS’01, Proceedings of the 14th International Conference on Neural Information Processing Systems: Natural and Synthetic, Vancouver, BC, Canada, 3–8 December 2001; MIT Press: Cambridge, MA, USA, 2001; Volume 14, pp. 849–856. [Google Scholar]
- Spielman, D.A. Spectral graph theory and its applications. In Proceedings of the 48th Annual IEEE Symposium on Foundations of Computer Science (FOCS’07), Providence, RI, USA, 21–23 October 2007; pp. 29–38. [Google Scholar]
- Pirani, M.; Sundaram, S. On the smallest eigenvalue of grounded Laplacian matrices. IEEE Trans. Autom. Control 2015, 61, 509–514. [Google Scholar] [CrossRef]
- Xia, W.; Cao, M. Analysis and applications of spectral properties of grounded Laplacian matrices for directed networks. Automatica 2017, 80, 10–16. [Google Scholar] [CrossRef]
- Wu, X. A divide and conquer algorithm on the double dimensional inverse eigenvalue problem for Jacobi matrices. Appl. Math. Comput. 2012, 219, 3840–3846. [Google Scholar] [CrossRef]
- Wei, Y.; Dai, H. An inverse eigenvalue problem for Jacobi matrix. Appl. Math. Comput. 2015, 251, 633–642. [Google Scholar] [CrossRef]
- Zhang, J.; Wei, G. Reconstruction of Jacobi matrices with mixed spectral data. Linear Algebra Its Appl. 2020, 591, 44–60. [Google Scholar] [CrossRef]
- Chu, M.T.; Golub, G.H. Inverse Eigenvalue Problems: Theory, Algorithms, and Applications; Oxford University Press: Oxford, UK, 2005; Volume 13. [Google Scholar]
- Smillie, J. Competitive and cooperative tridiagonal systems of differential equations. SIAM J. Math. Anal. 1984, 15, 530–534. [Google Scholar] [CrossRef]
- Ghanbari, K. A survey on inverse and generalized inverse eigenvalue problems for Jacobi matrices. Appl. Math. Comput. 2008, 195, 355–363. [Google Scholar] [CrossRef]
- Cai, J.; Chen, J. Iterative solutions of generalized inverse eigenvalue problem for partially bisymmetric matrices. Linear Multilinear Algebra 2017, 65, 1643–1654. [Google Scholar] [CrossRef]
- Maarouf, H. The resolution of the equation XA + XBX = HX and the pole assignment problem: A general approach. Automatica 2017, 79, 162–166. [Google Scholar] [CrossRef]
- Padula, F.; Ferrante, A.; Ntogramatzidis, L. Eigenstructure assignment in linear geometric control. Automatica 2021, 124, 109363. [Google Scholar] [CrossRef]
- Katewa, V.; Pasqualetti, F. Minimum-gain Pole Placement with Sparse Static Feedback. IEEE Trans. Autom. Control. 2020, 66, 3445–3459. [Google Scholar] [CrossRef]
- Valcher, M.E.; Parlangeli, G. On the effects of communication failures in a multi-agent consensus network. In Proceedings of the 2019 23rd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 9–11 October 2019; pp. 709–720. [Google Scholar]
- Parlangeli, G. A Supervisory Algorithm Against Intermittent and Temporary Faults in Consensus-Based Networks. IEEE Access 2020, 8, 98775–98786. [Google Scholar] [CrossRef]
- Parlangeli, G. Laplacian eigenvalue allocation by asymmetric weight assignment for path graphs. In Proceedings of the 2022 26th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 19–21 October 2022; pp. 503–508. [Google Scholar]
- Maybee, J.S. Combinatorially symmetric matrices. Linear Algebra Its Appl. 1974, 8, 529–537. [Google Scholar] [CrossRef]
- Boukas, A.; Feinsilver, P.; Fellouris, A. On the Lie structure of zero row sum and related matrices. Random Oper. Stoch. Equations 2015, 23, 209–218. [Google Scholar] [CrossRef]
- Barbeau, E.J. Polynomials; Springer Science & Business Media: Berlin, Germany, 2003. [Google Scholar]
- Barooah, P.; Hespanha, J.P. Graph effective resistance and distributed control: Spectral properties and applications. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 3479–3485. [Google Scholar]
- Olfati-Saber, R.; Fax, A.J.; Murray, R. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, L. Synchronization of multi-agent systems without connectivity assumptions. Automatica 2009, 45, 2744–2753. [Google Scholar] [CrossRef]
- Hao, H.; Barooah, P. Improving convergence rate of distributed consensus through asymmetric weights. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 787–792. [Google Scholar]
- Sardellitti, S.; Giona, M.; Barbarossa, S. Fast distributed average consensus algorithms based on advection-diffusion processes. IEEE Trans. Signal Process. 2009, 58, 826–842. [Google Scholar] [CrossRef]
- Chen, Y.; Tron, R.; Terzis, A.; Vidal, R. Corrective consensus with asymmetric wireless links. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 6660–6665. [Google Scholar]
- Song, Z.; Taylor, D. Asymmetric Coupling Optimizes Interconnected Consensus Systems. arXiv 2021, arXiv:2106.13127. [Google Scholar]
- Parlangeli, G.; Valcher, M.E. Leader-controlled protocols to accelerate convergence in consensus networks. IEEE Trans. Autom. Control 2018, 63, 3191–3205. [Google Scholar] [CrossRef]
- Parlangeli, G.; Valcher, M.E. Accelerating consensus in high-order leader-follower networks. IEEE Control Syst. Lett. 2018, 2, 381–386. [Google Scholar] [CrossRef]
- Herman, I.; Martinec, D.; Sebek, M. Zeros of transfer functions in networked control with higher-order dynamics. IFAC Proc. Vol. 2014, 47, 9177–9182. [Google Scholar] [CrossRef]
- Torres, J.A.; Roy, S. Graph-theoretic analysis of network input–output processes: Zero structure and its implications on remote feedback control. Automatica 2015, 61, 73–79. [Google Scholar] [CrossRef]
- Roy, S.; Torres, J.A.; Xue, M. Sensor and actuator placement for zero-shaping in dynamical networks. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 1745–1750. [Google Scholar]
- Xue, M.; Roy, S. Input-output properties of linearly-coupled dynamical systems: Interplay between local dynamics and network interactions. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 12–15 December 2017; pp. 487–492. [Google Scholar]
- Rahmani, A.; Ji, M.; Mesbahi, M.; Egerstedt, M. Controllability of multi-agent systems from a graph-theoretic perspective. SIAM J. Control Optim. 2009, 48, 162–186. [Google Scholar] [CrossRef]
- Bullo, F.; Cortés, J.; Martínez, S. Distributed Control of Robotic Networks; Applied Mathematics Series; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Swain, A.R.; Hansdah, R. A model for the classification and survey of clock synchronization protocols in WSNs. Ad Hoc Netw. 2015, 27, 219–241. [Google Scholar] [CrossRef]
- Schenato, L.; Fiorentin, F. Average timesynch: A consensus-based protocol for clock synchronization in wireless sensor networks. Automatica 2011, 47, 1878–1886. [Google Scholar] [CrossRef]
- Oliveira, L.M.; Rodrigues, J.J. Wireless Sensor Networks: A Survey on Environmental Monitoring. J. Commun. 2011, 6, 143–151. [Google Scholar] [CrossRef]
- Stüdli, S.; Seron, M.M.; Middleton, R.H. From vehicular platoons to general networked systems: String stability and related concepts. Annu. Rev. Control 2017, 44, 157–172. [Google Scholar] [CrossRef]
- Herman, I.; Knorn, S.; Ahlén, A. Disturbance scaling in bidirectional vehicle platoons with different asymmetry in position and velocity coupling. Automatica 2017, 82, 13–20. [Google Scholar] [CrossRef]
- Farhangi, H. The path of the smart grid. IEEE Power Energy Mag. 2009, 8, 18–28. [Google Scholar] [CrossRef]
- Fang, X.; Misra, S.; Xue, G.; Yang, D. Smart grid—The new and improved power grid: A survey. IEEE Commun. Surv. Tutorials 2011, 14, 944–980. [Google Scholar] [CrossRef]
- Molzahn, D.K.; Dörfler, F.; Sandberg, H.; Low, S.H.; Chakrabarti, S.; Baldick, R.; Lavaei, J. A survey of distributed optimization and control algorithms for electric power systems. IEEE Trans. Smart Grid 2017, 8, 2941–2962. [Google Scholar] [CrossRef]
- Mesbahi, M.; Egerstedt, M. Graph Theoretic Methods in Multiagent Networks; Princeton University Press: Princeton, NJ, USA, 2010. [Google Scholar]
- Parlangeli, G.; Indiveri, G. Single range observability for cooperative underactuated underwater vehicles. Annu. Rev. Control 2015, 40, 129–141. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parlangeli, G. A Distributed Algorithm for the Assignment of the Laplacian Spectrum for Path Graphs. Mathematics 2023, 11, 2359. https://doi.org/10.3390/math11102359
Parlangeli G. A Distributed Algorithm for the Assignment of the Laplacian Spectrum for Path Graphs. Mathematics. 2023; 11(10):2359. https://doi.org/10.3390/math11102359
Chicago/Turabian StyleParlangeli, Gianfranco. 2023. "A Distributed Algorithm for the Assignment of the Laplacian Spectrum for Path Graphs" Mathematics 11, no. 10: 2359. https://doi.org/10.3390/math11102359
APA StyleParlangeli, G. (2023). A Distributed Algorithm for the Assignment of the Laplacian Spectrum for Path Graphs. Mathematics, 11(10), 2359. https://doi.org/10.3390/math11102359