Abstract
We extend our analysis on the Lie symmetries in fluid dynamics to the case of macroscopic traffic estimation models. In particular we study the Aw–Rascle–Zhang model for traffic estimation, which consists of two hyperbolic first-order partial differential equations. The Lie symmetries, the one-dimensional optimal system and the corresponding Lie invariants are determined. Specifically, we find that the admitted Lie symmetries form the four-dimensional Lie algebra . The resulting one-dimensional optimal system is consisted by seven one-dimensional Lie algebras. Finally, we apply the Lie symmetries in order to define similarity transformations and derive new analytic solutions for the traffic model. The qualitative behaviour of the solutions is discussed.
MSC:
35A09; 35C05; 35C07
1. Introduction
Traffic flow theory is focused on the study of the conditions of movement of vehicles in traffic flows in a road network. The general knowledge of traffic flow theory is important for the general evaluation and improvement of the road network [1]. Traffic flow models can be classified in three large categories in a similar way to those of physical theories, that is, microscopic, mesoscopic and macroscopic models. The traffic flow in microscopic models is described by the individual particles, i.e., vehicles, the motion of which is governed by specific rules. For instance, the models of this category depend upon each independent driver’s behaviour and interaction, as well as on the vehicle type. For instance, the desired speed and the acceleration provided by the engine’s torque are parameters related to this kind of vehicle. Some microscopic models have been presented before, for instance, in [2,3,4]. On the other hand, mesoscopic traffic models provide a high modelling flexibility wherein the dynamics are described by groups of vehicles. Indeed, in mesoscopic models, the traffic flow is described with the use of probability distribution functions which are governed by the driver’s behaviour of the individual vehicle groups [5,6]. Finally, macroscopic traffic models use a fluid dynamics approach where the vehicles on the road are considered to describe a constant flow in a tube. Macroscopic traffic models focus on the study of the aggregate behaviour of the traffic flow. For a review, we refer the reader to [7].
Macroscopic traffic flow models are suitable for short-term forecasting in the context of traffic management because they can describe the most important properties of the traffic flow such as the formation and dissipation of queues and many other phenomena, e.g., shock waves, collisions, etc. The main novelty of these models is that the quantities which correspond to the properties of the flow are described by hyperbolic mathematical equations inspired by the physics of fluids. The Lighthill–Whitham–Richards (LWR) model describes the density of the traffic with a flux function [8,9]:
where t is the time and x is the position of the vehicles along the road. The simplest consideration for the flux term is , where u is the velocity field of the vehicles. For the velocity term, it holds that for a maximum number of cars, that is, , , which means that there is no motion. There is a plethora of flux functions Q which have been introduced into the literature phenomenologically in order to describe the traffic in various traffic states [10,11,12].
The LWR model comprises one differential equation, and that is why it is usually referred to as a first-order traffic model. There is a plethora of higher-order traffic models in the literature [13,14]. A second-order model which has drawn the attention of the scientific community is the Aw–Rascle–Zhang model (ARZ) proposed independently by Aw–Rascle [15] and Zhang [16].
The Aw–Rascle model [15] is described by the following set of the partial differential equations:
where is the pressure component for the traffic flow, and the constant is the relaxation time which describes the drivers’ driving behaviour adapting to equilibrium density–velocity relation over time. defines the equilibrium velocity–density relation and is a decreasing function, while for the pressure term is considered as , where .
On the other hand, the Zhang model is:
The combination of these two models with the conditions and gives , where is the free flow velocity. Moreover, because in the maximum , , it follows that and .
Hence, the ARZ model is expressed by the following set of partial differential equations:
where .
From the second equation of the ARZ model, it is clear that, while the number of the cars is conserved, that is not true for the momentum, except in the case where the relaxation time becomes infinite such that the ARZ model is reduced to become homogeneous. In [17], the Riemann problem was studied for the ARZ model in the presence of junctions, while the Cauchy problem was investigated in [18]. An anisotropic traffic flow model with a nonconcave equilibrium flux was the subject of study in [19]. Global solutions were determined for the ARZ model in the presence of a finite relaxation time.
In this work, we focus on the existence of invariant functions for the ARZ model. In particular, we apply the theory of Lie symmetries of differential equations to determine one-parameter point transformations in the space of variables , which leave the differential equations invariant. Thus, a symmetry vector can be determined which provides a set of similarity transformations to determine invariant functions and similarity solutions by reducing the number of variables [20,21,22,23]. The novelty of Lie symmetry analysis is that invariant functions can be constructed in a simple and systematic approach. There exists a relation between Lie symmetries and conservation laws for differential equations [20].
The Lie symmetry classification problem was established by Ovsiannikov [24], and it has been used in various systems of mathematical physics and applied mathematics, see, for instance, [25,26,27,28,29,30,31,32,33,34]. In the context of fluid dynamics, Lie symmetry analysis has been used for the derivation of very important results, see the series of studies [35,36,37,38,39,40,41,42,43,44,45,46]. The structure of the paper is as follows.
In Section 2, we present the Lie symmetry analysis for the ARZ traffic model. Moreover, we derive the one-dimensional optimal system, which is important in order to perform a complete classification of the Lie invariants, and determine all the independent similarity solutions. In Section 3, we present for the first time the application of the Lie symmetries to the ARZ traffic model and we derive similarity solutions. Finally, in Section 4, we summarize our results and draw our conclusions.
2. Lie Symmetries and Invariants
In the following paragraphs, we briefly discuss the basic elements of the theory of Lie symmetries of differential equations.
Consider the function as describing the map of a one-parameter point transformation with infinitesimal transformation [22]:
Parameter is the infinitesimal parameter, and . are the independent variables, and are the dependent variables of the dynamical system for the ARZ model .
The following vector field can be defined:
where and . The vector field is called the generator of the transformation with map
The dynamical system under the action of the map becomes . Hence, the dynamical system remains invariant under the action of the infinitesimal transformation if and only if the following is true [22]:
The latter expression is the definition of Lie derivative for the function along the vector field ; equivalently, the symmetry conditions becomes:
where is the nth-extension of in the jet-space . For the ARZ traffic model, the jet-space is .
The calculation of the Lie symmetries for a given system of differential equations is essential because there are many important results which can be inferred about the properties of the system. The simplest application of the Lie symmetries is the construction of invariant functions which are used to simplify a given differential equation by the method of reduction.
For each Lie symmetry vector , we define the associated Lagrange’s system:
The solution of the latter system provides the so-called invariant functions which are used to reduce the number of independent variables of the differential equation and lead to the construction of similarity solutions. In the case of partial differential equations, the application of the Lie invariants reduces the number of the independent variables. The solutions which follow from the application of the Lie invariants are known as similarity solutions.
The similarity transformations determined by the admitted Lie symmetry vectors provide similarity solutions, which, however, are not all independent, and they are related to the Adjoint representation. In order to classify all the possible similarity transformations and solutions, the one-dimensional optimal system should be calculated [23].
Consider the th-dimensional Lie algebra with elements and structure constants , and Assume now the two generic Lie symmetry vectors [23]:
where are coefficient constants.
Thus, the vector field and will be equivalent if and only if [23]:
or
where is the Adjoint operator, expressed as:
The one-dimensional subalgebras of , which are not related through the adjoint representation, form the one-dimensional optimal system. The determination of the one-dimensional system is essential in order to perform a complete classification of all the possible similarity transformations and solutions.
Lie Symmetries for the ARZ Model
In order to determine the admitted Lie symmetries of the ARZ model (6), (7), we should solve the Lie symmetry condition (13), which is the following system of partial differential equations:
from where we find the following symmetry vectors:
The Lie symmetries form a four-dimensional Lie algebra, the in the Patera et al. classification scheme [47].
In Table 1, the commutators of the admitted Lie symmetries are presented while the adjoint representation is given in Table 2. Hence, from these two tables, we can determine the one-dimensional optimal system.

Table 1.
Commutators for the admitted Lie point symmetries of the ARZ traffic model.
Table 2.
Adjoint representation for the admitted Lie point symmetries of the ARZ traffic model.
Indeed, consider now the generic symmetry vector:
Then, by applying the operators , it follows:
Thus, for and , the vector field is equivalent to the vector , where now, without loss of generality, we can select .
In a similar way, we can construct the rest of the one-dimensional optimal system. Indeed, we determine the one-dimensional Lie algebras:
where is a nonzero constant.
For each element of the one-dimensional optimal system, we derive the Lie invariants which are used to define similarity transformations in order to solve the dynamical system. The Lie Invariants are derived in Table 3
Table 3.
Invariant functions for the one-dimensional optimal system of the ARZ traffic model.
3. Similarity Transformations and Solutions
In this Section, we present the application of the Lie symmetries on the ARZ model for the construction of similarity solutions.
3.1. Reduction with
The reduced system provides a static solution, that is:
Hence, and
with a constant solution .
In Figure 1, we numerically solve the differential Equation (25) for various values of the free parameters from which we observe that there exists an attractor for the dynamical system in which the density of vehicles becomes constant. For the numerical simulations in the this work, we apply the use of the Runge–Kutta method. From the figure, we can observe that there exists a stationary point where is constant. Near the stationary point, the traffic flow becomes also constant, since .
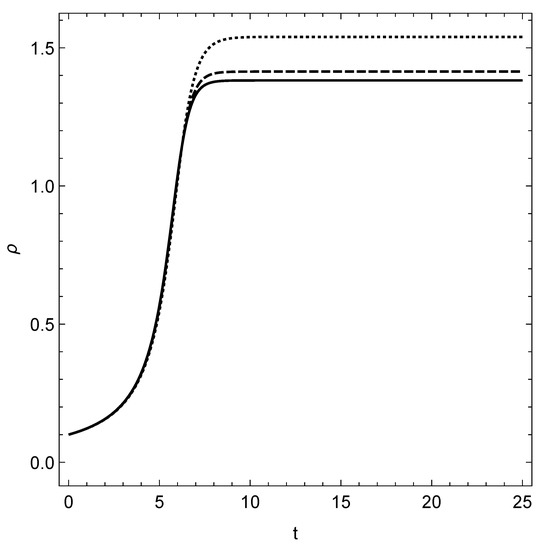
Figure 1.
We numerically solve the differential Equation (25) for and . Solid line is for dashed line is for and dotted line is for . We observe that for these values and for initial condition , there exists a stationary point for the differential Equation (25), which is an attractor. This means that, for these conditions, there exists a limit at which the traffic density and the momentum become constants.
3.2. Reduction with
The stationary solution is described by the dynamical system:
that is,
This solution states that for large values of t, and for , , while the density of the flow is always constant.
3.3. Reduction with
Reduction with the symmetry vector provides the system of ordinary differential equations:
with the closed-form solution:
For , the density of the traffic flow increases exponentially while the momentum can reach a limit and become negative after it, that is, reverse direction for the vehicles.
3.4. Reduction with
The Lie invariants provided by the vector field give the reduced system:
or
in which and .
The latter equation applies the Lie symmetry vector , which indicates that the second-order differential equation can be reduced further into a first-order differential equation. Hence, by assuming the new invariants and we find that:
which is an Abel’s equation of the second kind.
In Figure 2, we present numerical simulations for the energy density and for different values of the free parameter We remark that for large values of time, vanishes and becomes a constant.
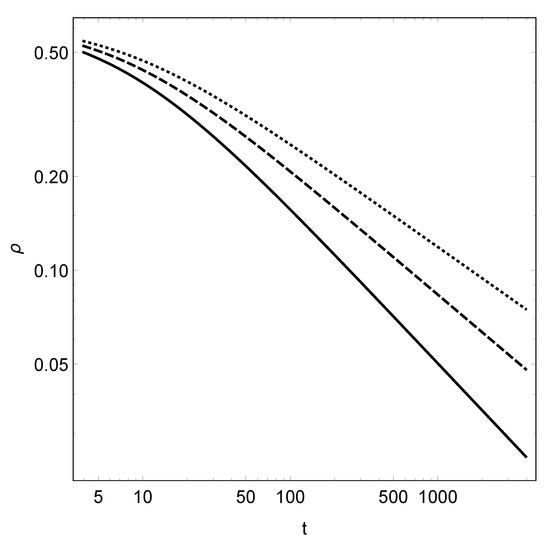
Figure 2.
We numerically solve the differential Equation (35) for and . Solid line is for dashed line is for and dotted line is for . We observe that for these values and for initial condition and , the traffic density becomes zero. We observe that for large values of vanishes, while from Equation (34), it follows that .
3.5. Reduction with
3.6. Reduction with
From the vector field , we define and such that:
with
The later equation is linear and can be integrated. For large values of t, the asymptotic behaviour provides and . Thus, .
3.7. Reduction with
Finally, from the last element of the one-dimensional optimal system , we derive , where the reduced system is:
and
.
The latter system can be solved numerically.
From the numerical solutions presented in Figure 3, we observe that becomes constant and decreases. However, in the original variables, that means that increases exponentially and u becomes constant.
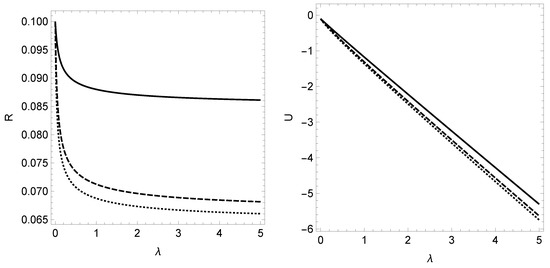
Figure 3.
We numerically solve the dynamical system (39), (40) for various values of the free parameters. Plots are for and (solid lines), (dashed lines) and (dotted lines). Left figure is for the energy density and right figure for the momentum . From the numerical solution, we observe that becomes constant and U decreases. However, in the original variables, that means that increases exponentially and u becomes constant.
4. Conclusions
In this study, we applied the theory of Lie symmetries for the investigation of the algebraic properties for the ARZ model of traffic estimation. The ARZ model is a system of two hyperbolic equations of the first-order with dependent variables, the density of the vehicles and the momentum. The master equations of the ARZ model have similarities with those of the fluid dynamics systems.
We applied the same approach for the study of the ARZ model as we did for a series of studies on fluid dynamics. Specifically, we determined the Lie point symmetries, the one-dimensional optimal system and the corresponding Lie invariants. This complete analysis of the group properties of the traffic flow system give us important information about the invariant of the evolution of the dynamical system, as well as information for the free parameters of the model.
Furthermore, we considered the Lie invariants in order to define the similarity transformations necessary for the derivation of similarity solutions or to simplify the ARZ model into a system of ordinary differential equations. We found that the one-dimensional optimal system is comprised of seven one-dimensional algebras; thus, we performed seven reductions of the ARZ hyperbolic system into ordinary differential equations. The reduced equations have been studied with analytical and numerical methods in order to determine the general evolution of the similarity solutions.
This is one of the few analyses in the literature on the application of the Lie symmetries in traffic control. The results are of special interest, and in a future study, we plan to investigate the application of the invariants in a real-world scenario. In addition, the Lie symmetries will be used for the derivation of conservation laws for the traffic estimation models.
Author Contributions
A.P. Introduce the problem and did the main analysis. P.G.L.L. wrote the final version of the paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The author declares no conflict of interest.
References
- Horvat, R.; Kos, G.; Sevrovic, M. Traffic flow modelling on the road network in the cities. Teh. Vjesn. 2015, 22, 475. [Google Scholar] [CrossRef]
- Gipps, P.G. A behavioural car-following model for computer simulation. Transp. Res. Part B Methodol. 1981, 15, 105. [Google Scholar] [CrossRef]
- Nage, K.; Schreckenberg, M. A cellular automaton model for freeway traffic. J. Physicque 1992, 2, 221. [Google Scholar]
- Kanagaraj, V.; Asaithambi, G.; Naveer Kumar, C.H.; Srinivasan, K.K.; Sivanandan, R. Evaluation of Different Vehicle Following Models Under Mixed Traffic Conditions. Procedia-Soc. Behav. Sci. 2013, 104, 390. [Google Scholar] [CrossRef]
- Van Wageningen-Kessels, F.; van Lint, H.; Vuik, K.; Hoogendoorn, S.P. Genealogy of traffic flow models. EURO J. Transp. Logist. 2015, 4, 445. [Google Scholar] [CrossRef]
- Ferrara, A.; Sacone, S.; Siri, S. Microscopic and mesoscopic traffic models. In Freeway Traffic Modelling and Control; Advances in Industrial Control; Springer: Cham, Swizterland, 2018. [Google Scholar]
- Mohan, R.; Ramadurai, G. State-of-the art of macroscopic traffic flow modelling. Int. J. Adv. Eng. Sci. Appl. Math. 2013, 5, 158. [Google Scholar] [CrossRef]
- Lighthill, M.J.; Whitham, G.B. On kinematic waves II. A theory of traffic flow on long crowded roads. Proc. Roy. Soc. A 1955, 229, 317. [Google Scholar]
- Richards, P.I. Shock waves on the highway. Oper. Res. 1956, 4, 42. [Google Scholar] [CrossRef]
- Daganzo, C.F. The cell transmission model: A dynamic representation of highway traffic consistent with the hydrodynamic theory. Transp. Res. B 1994, 28, 269. [Google Scholar] [CrossRef]
- Vikram, D.; Chakroborty, P.; Mittal, S. Exploring the behavior of LWR continuum models of traffic flow in presence of shock waves. In Proceedings of the 2nd Conference of Transportation Research Group of India, Taj Mahal, Indiam, 12–15 December 2013. [Google Scholar] [CrossRef]
- Newell, G.F. A simplified theory of kinematic waves in highway traffic II: Queueing at freeway bottlenecks. Transp. Res. B 1993, 27, 289. [Google Scholar] [CrossRef]
- Whitham, G.B. Linear and Nonlinear Waves; John Wiley and Sons: New York, NY, USA, 1974. [Google Scholar]
- Payne, H.J. Models of freeway traffic and control. Proc. Simul. Counc. 1971, 1, 51. [Google Scholar]
- Aw, A.; Rascle, M. Resurrection of second order models of traffic flow. SIAM J. Appl. Math. 2000, 60, 916. [Google Scholar] [CrossRef]
- Zhang, H.M. A non-equilibrium traffic model devoid of gas-like behavior. Transp. Res. B 2002, 36, 275. [Google Scholar] [CrossRef]
- Caravello, M.; Piccoli, B. Traffic Flow on a Road Network Using the Aw–Rascle Model. Commun. Partial. Differ. Equ. 2006, 31, 243. [Google Scholar] [CrossRef]
- Coclite, G.M.; Garavello, M.; Piccoli, B. Traffic flow on a road network. SIAM J. Math. Anal. 2005, 36, 1862. [Google Scholar] [CrossRef]
- Li, T. Global solutions of nonconcave hyperbolic conservation laws with relaxation arising from traffic flow. J. Differ. Equ. 2003, 190, 131. [Google Scholar] [CrossRef]
- Ibragimov, N.H. Symmetries, exact solutions, and conservation laws. In CRC Handbook of Lie Group Analysis of Differential Equations; CRS Press LLC: Florida, FL, USA, 2000; Volume I. [Google Scholar]
- Bluman, G.W.; Kumei, S. Symmetries of Differential Equations; Springer: New York, NY, USA, 1989. [Google Scholar]
- Stephani, H. Differential Equations: Their Solutions Using Symmetry; Cambridge University Press: New York, NY, USA, 1989. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Springer: New York, NY, USA, 1993. [Google Scholar]
- Ovsiannikov, L.V. Group Analysis of Differential Equations; Academic Press: New York, NY, USA, 1982. [Google Scholar]
- Leach, P.G.L.; Paliathanasis, A.; Jamal, S. Quaestiones. Mathematicae 2019, 42, 125. [Google Scholar]
- Muatjetjeja, B.; Khalique, C.M. Benjamin–Bona–Mahony Equation with Variable Coefficients: Conservation Laws. Symmetry 2014, 6, 1026. [Google Scholar] [CrossRef]
- Jamal, S. Dynamical Systems: Approximate Lagrangians and Noether Symmetries. IJGMMP 2019, 16, 1950160. [Google Scholar] [CrossRef]
- Halder, A.K.; Paliathanasis, A.; Rangasamy, S.; Leach, P.G.L. Similarity solutions for the complex Burgers’ hierarchy. Z. Naturforschung A 2019, 74, 597. [Google Scholar] [CrossRef]
- Jamal, S.; Kara, A.H. New higher-order conservation laws of some classes of wave and Gordon-type equations. Nonlinear Dyn. 2012, 67, 97. [Google Scholar] [CrossRef]
- Ali, M.R.; Hadhoud, A.R. A truncation method for solving the time-fractional Benjamin-Ono equation. Results Phys. 2019, 12, 525. [Google Scholar] [CrossRef]
- Chou, K.S.; Qu, C.Z. Optimal Systems and Group Classification of (1+2)-Dimensional Heat Equation. Acta Appl. 2004, 83, 257. [Google Scholar] [CrossRef]
- Huang, D.; Ivanova, N.M. Group analysis and exact solutions of a class of variable coefficient nonlinear telegraph equations. J. Math. Phys. 2007, 48, 073507. [Google Scholar] [CrossRef]
- Mahomed, F.M. Symmetry group classification of ordinary differential equations. Math. Methods Appl. Sci. 2007, 30, 1995. [Google Scholar] [CrossRef]
- Xin, X.; Liu, Y.; Liu, X. Nonlocal symmetries, exact solutions and conservation laws of the coupled Hirota equations. Appl. Math. Lett. 2016, 55, 63. [Google Scholar] [CrossRef]
- Webb, G.M.; Zank, G.P. Fluid relabelling symmetries, Lie point symmetries and the Lagrangian map in magnetohydrodynamics and gas dynamics. J. Math. Phys. A: Math. Theor. 2007, 40, 545. [Google Scholar] [CrossRef]
- Meleshko, S.V.; Samatova, N.F. Invariant solutions of the two-dimensional shallow water equations with a particular class of bottoms. AIP Conf. Proc. 2019, 2164, 050003. [Google Scholar]
- Bihlo, A.; Poltavets, N.; Popovych, R.O. Lie symmetries of two-dimensional shallow water equations with variable bottom topography. Chaos 2020, 30, 073132. [Google Scholar] [CrossRef]
- Aksenov, A.V.; Druzhkov, K.P. Conservation laws and symmetries of the shallow water system above rough bottom. J. Phys.: Conf. Ser. 2016, 722, 012001. [Google Scholar] [CrossRef]
- Paliathanasis, A. One-Dimensional Optimal System for 2D Rotating Ideal Gas. Symmetry 2019, 11, 1115. [Google Scholar] [CrossRef]
- Bira, B.; Sekhar, T.R.; Zeidan, D. Exact solutions for some time-fractional evolution equations using Lie group theory. Comput. Math. Appl. 2016, 71, 46. [Google Scholar] [CrossRef]
- Chesnokov, A.A. Symmetries and exact solutions of the shallow water equations for a two-dimensional shear flow. J. Appl. Mech. Techn. Phys. 2008, 49, 737. [Google Scholar] [CrossRef]
- Chesnokov, A.A. Symmetries and exact solutions of the rotating shallow-water equations. Eur. J. Appl. Math. 2009, 20, 461. [Google Scholar] [CrossRef]
- Akbulut, A.; Mirzazadeh, M.; Hashemi, M.S.; Salahshour, S.; Park, C. Triki–Biswas model: Its symmetry reduction, Nucci’s reduction and conservation laws. Int. J. Mod. Phys. B 2022, in press. [Google Scholar] [CrossRef]
- Hashemi, M.S.; Bahrami, F.; Najfi, R. Lie symmetry analysis of steady-state fractional reaction-convection-diffusion equation. Optik 2017, 138, 240. [Google Scholar] [CrossRef]
- Euler, M.; Euler, N.; Nucci, M.C. Ordinary differential equations invariant under two-variable Möbius transformations. Appl. Math. Lett. 2021, 117, 107105. [Google Scholar] [CrossRef]
- Nucci, M.C.; Leach, P.G.L. The Jacobi Last Multiplier and its applications in mechanics. Phys. Scr. 2008, 78, 065011. [Google Scholar] [CrossRef]
- Patera, J.; Sharp, R.T.; Winteritz, P.; Zassenhaus, H. Invariants of real low dimension Lie algebras. J. Math. Phys. 1976, 17, 986. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).