
Event-Triggered State Estimation for Fractional-Order Neural Networks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1.
- The ETSE problem is, for the first time, investigated for a class of FONNs with the Caputo fractional derivative. A sufficient criterion is established to ensure the global Mittag–Leffler stability of the estimation error system.
- 2.
- The even-triggering mechanism is designed by taking the continuous output measurement as the triggering threshold. The Zeno phenomenon is excluded by combining the properties of the fractional-order derivative and Gamma function.
- 3.
- An algorithm for deriving the gain matrix is proposed in the form of LMIs, which is readily conducted by using Matlab Toolbox.
2. Model Description and Preliminaries
3. Main Results
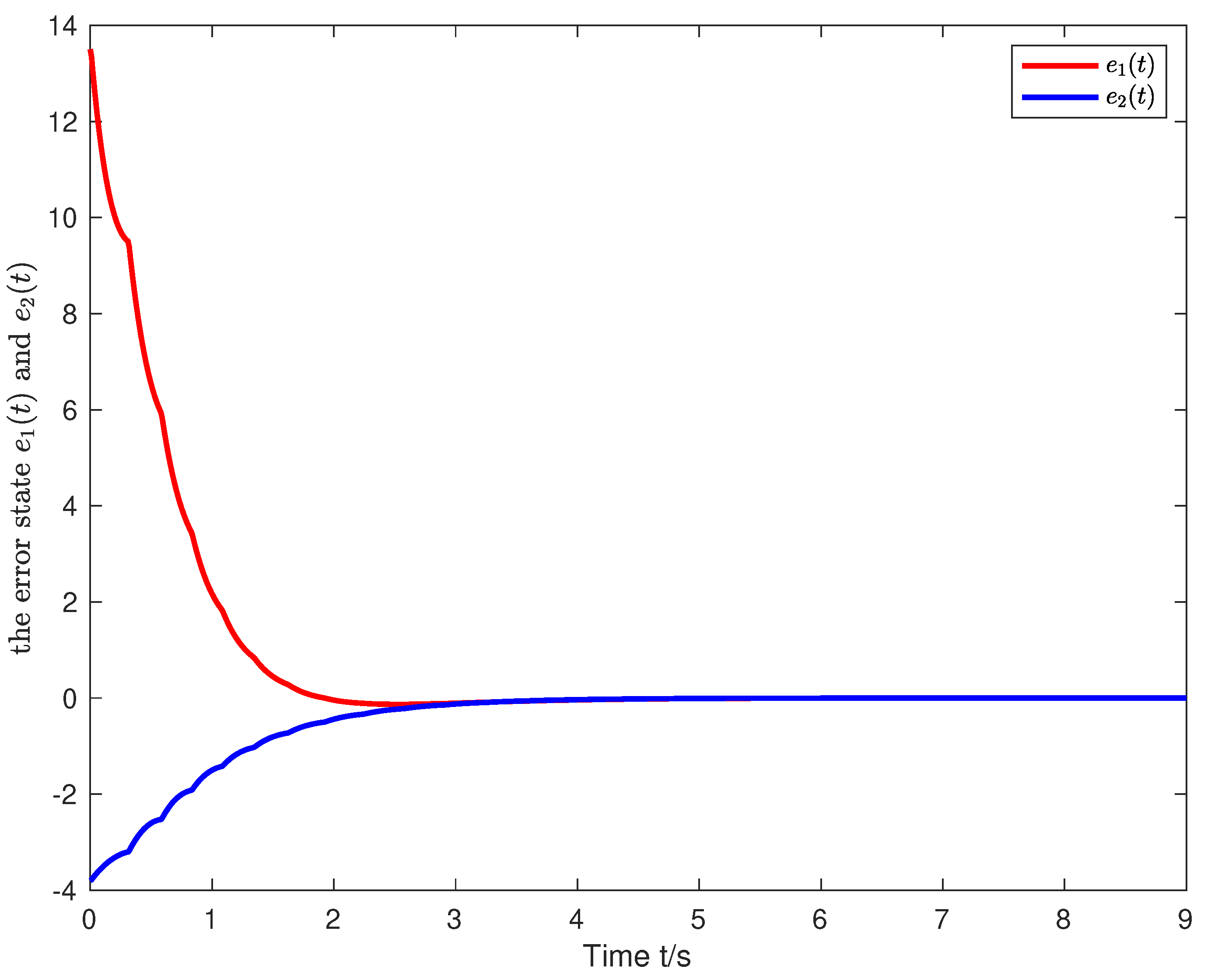
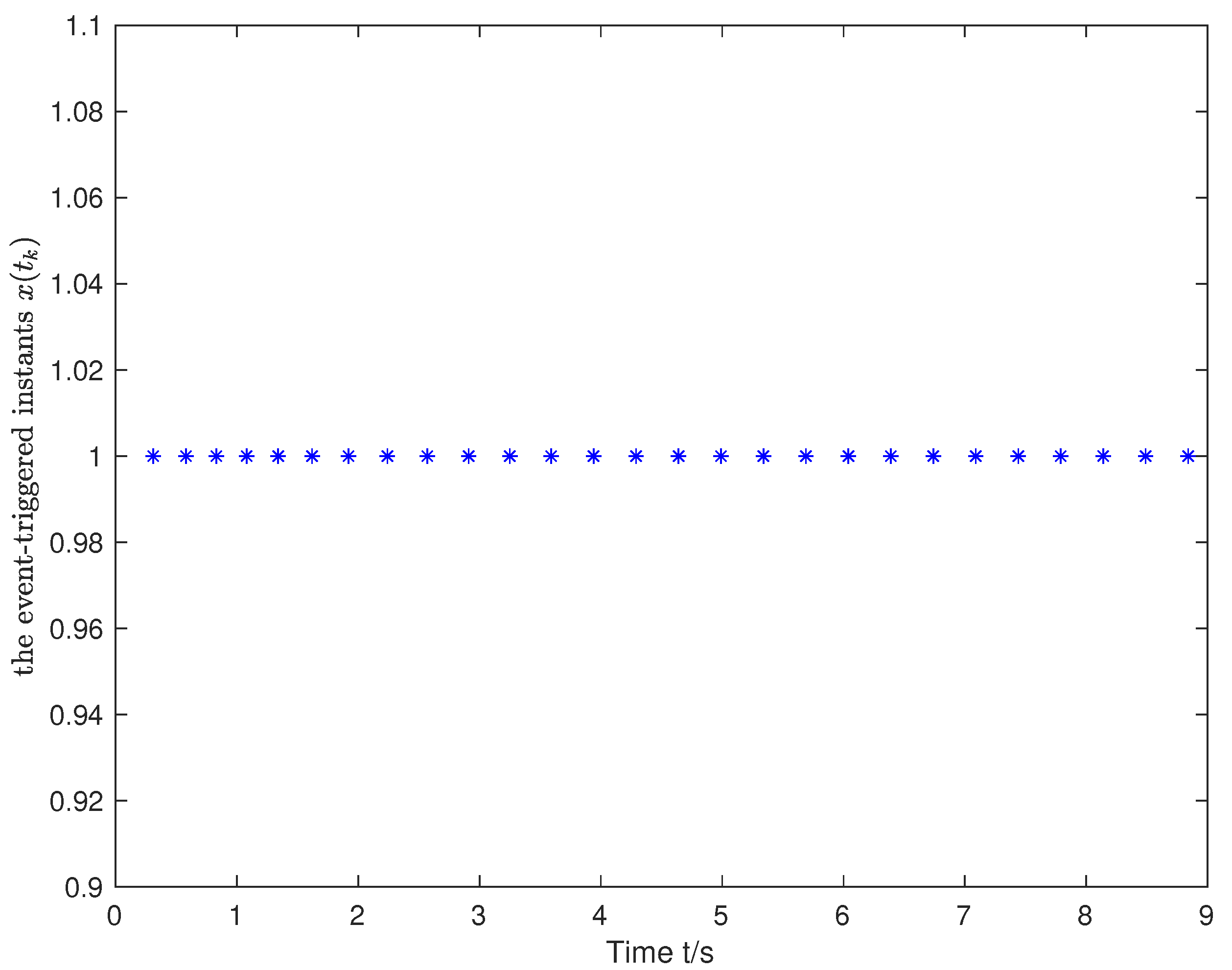
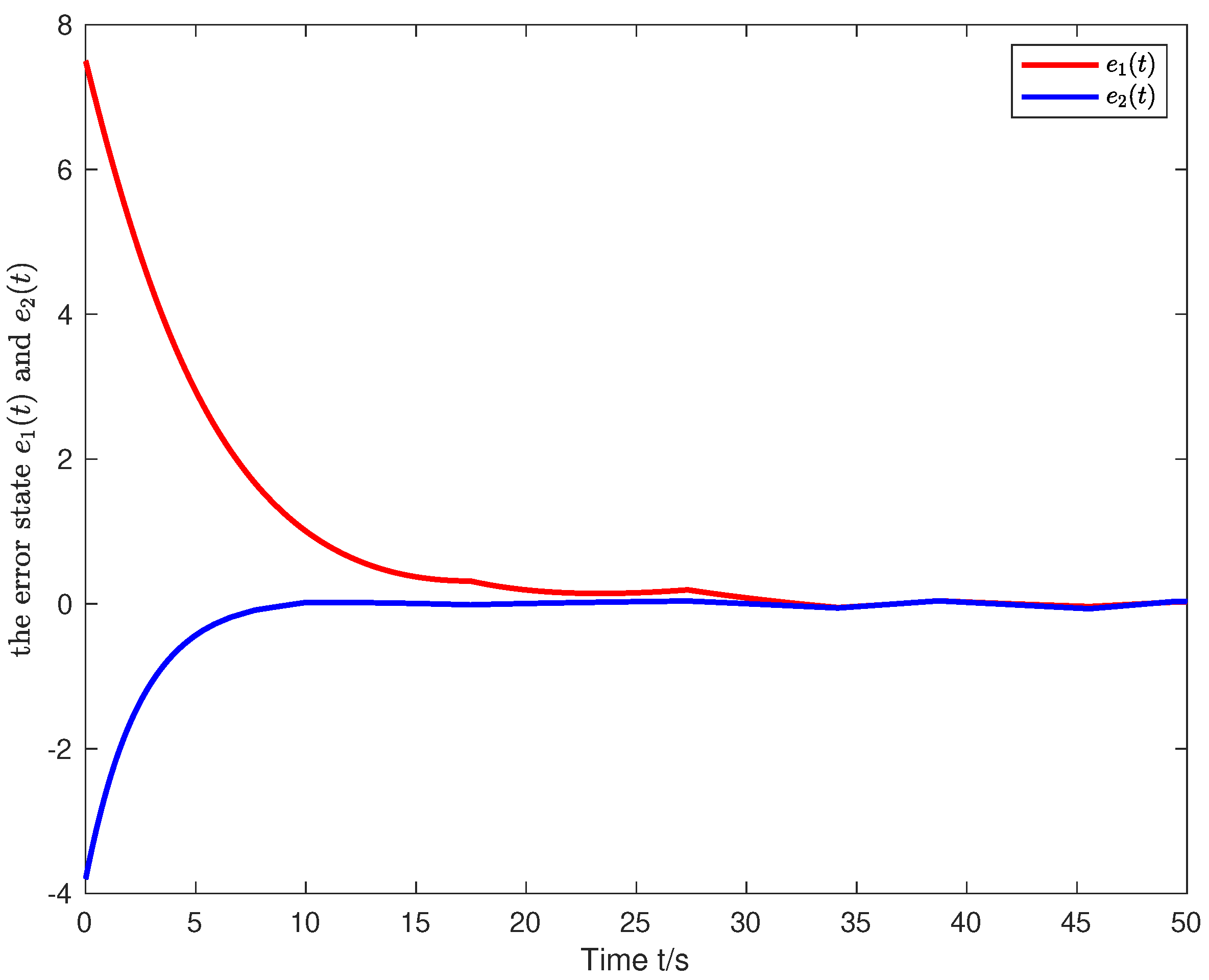
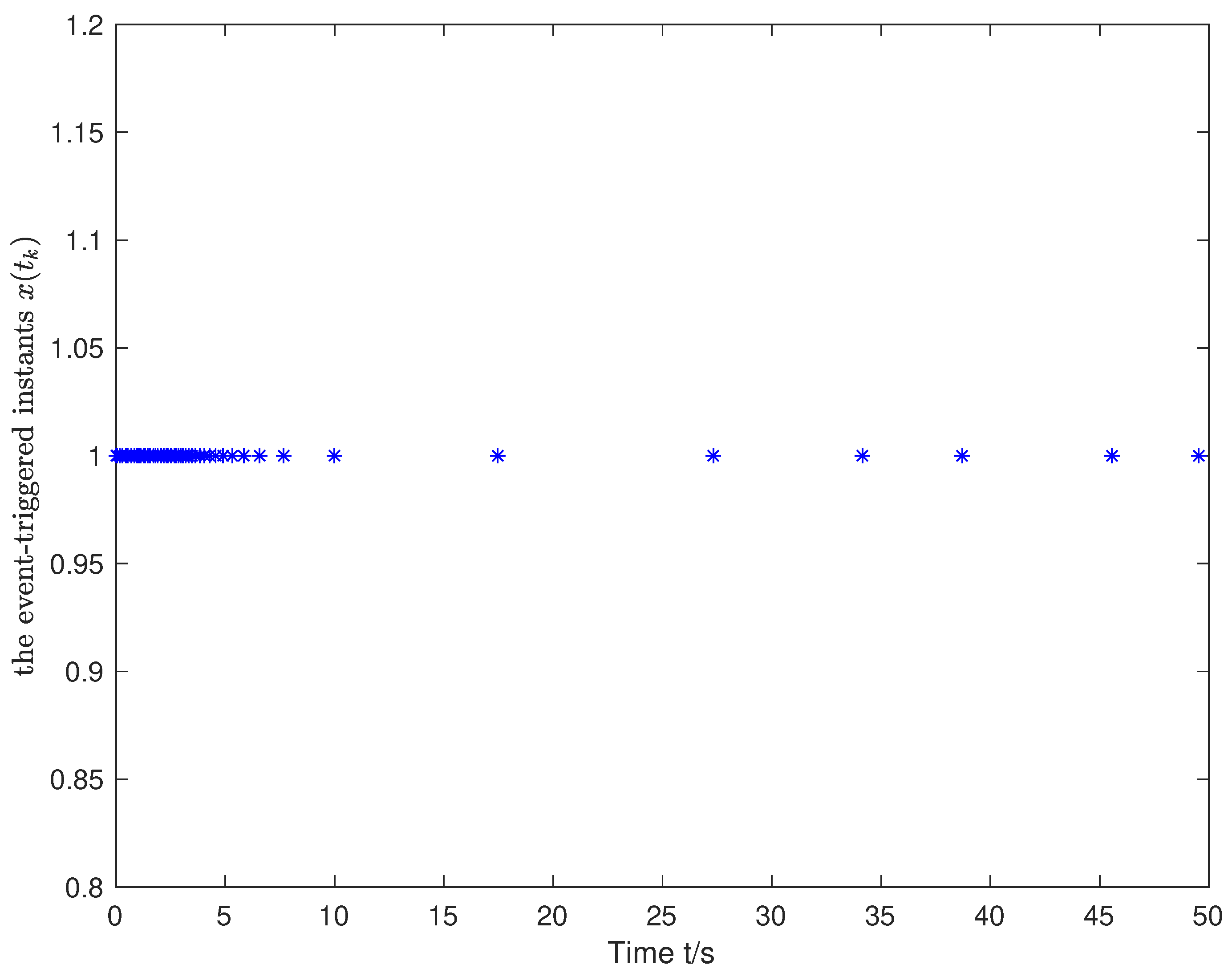
4. Numerical Examples and Simulations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bao, H.; Park, J.H.; Cao, J. Synchronization of fractional-order complex-valued neural networks with time delay. Neural Netw. 2016, 81, 16–28. [Google Scholar] [CrossRef]
- Velmurugan, G.; Rakkiyappan, R.; Vembarasan, V.; Cao, J.; Alsaedi, A. Dissipativity and stability analysis of fractional-order complex-valued neural networks with time delay. Neural Netw. 2017, 86, 42–53. [Google Scholar] [CrossRef]
- Subramanian, K.; Muthukumar, P. Existence, uniqueness, and global asymptotic stability analysis for delayed complex-valued Cohen–Grossberg BAM neural networks. Neural Comput. Appl. 2018, 29, 565–584. [Google Scholar] [CrossRef]
- Gunasekaran, N.; Zhai, G. Stability analysis for uncertain switched delayed complex-valued neural networks. Neurocomputing 2019, 367, 198–206. [Google Scholar] [CrossRef]
- Tan, Y.; Liu, Y.; Niu, B.; Fei, S. Event-triggered synchronization control for T–S fuzzy neural networked systems with time delay. J. Frankl. Inst. 2020, 357, 5934–5953. [Google Scholar] [CrossRef]
- Li, Y.; Xie, W.; Li, H. Hyperspectral image reconstruction by deep convolutional neural network for classification. Pattern Recognit. 2017, 63, 371–383. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, Y.; Yu, J. LMI conditions for global stability of fractional-order neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2423–2433. [Google Scholar] [CrossRef]
- Cao, J.; Wang, J. Global asymptotic and robust stability of recurrent neural networks with time delays. IEEE Trans. Circuits Syst. Regul. Pap. 2005, 52, 417–426. [Google Scholar]
- Yang, X.; Wan, X.; Zunshui, C.; Cao, J.; Liu, Y.; Rutkowski, L. Synchronization of switched discrete-time neural networks via quantized output control with actuator fault. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4191–4201. [Google Scholar] [CrossRef]
- Tang, R.; Su, H.; Zou, Y.; Yang, X. Finite-Time Synchronization of Markovian Coupled Neural Networks With Delays via Intermittent Quantized Control: Linaear Programming Approach. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef]
- Zou, Y.; Su, H.; Tang, R.; Yang, X. Finite-time bipartite synchronization of switched competitive neural networks with time delay via quantized control. ISA Trans. 2021. [Google Scholar] [CrossRef]
- Gao, Y.; Guo, X.; Yao, R.; Zhou, W.; Cattani, C. Stability analysis of neural network controller based on event triggering. J. Frankl. Inst. 2020, 357, 9960–9975. [Google Scholar] [CrossRef]
- Yu, H.; Shang, J.; Chen, T. On stochastic and deterministic event-based state estimation. Automatica 2021, 123, 109314. [Google Scholar] [CrossRef]
- Nagamani, G.; Shafiya, M.; Soundararajan, G.; Prakash, M. Robust State Estimation for Fractional-order Delayed BAM Neural Networks via LMI Approach. J. Frankl. Inst. 2020, 357, 4964–4982. [Google Scholar] [CrossRef]
- Hu, B.; Song, Q.; Zhao, Z. Robust state estimation for fractional-order complex-valued delayed neural networks with interval parameter uncertainties: LMI approach. Appl. Math. Comput. 2020, 373, 125033. [Google Scholar] [CrossRef]
- Diethelm, K. The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Feng, T.; Wang, Y.E.; Liu, L.; Wu, B. Observer-based event-triggered control for uncertain fractional-order systems. J. Frankl. Inst. 2020, 357, 9423–9441. [Google Scholar] [CrossRef]
- Kaslik, E.; Sivasundaram, S. Nonlinear dynamics and chaos in fractional-order neural networks. Neural Netw. 2012, 32, 245–256. [Google Scholar] [CrossRef]
- Wang, H.; Song, Q. State estimation for neural networks with mixed interval time-varying delays. Neurocomputing 2010, 73, 1281–1288. [Google Scholar] [CrossRef]
- Li, C.; Zhang, F. A survey on the stability of fractional differential equations. Eur. Phys. J. Spec. Top. 2011, 193, 27–47. [Google Scholar] [CrossRef]
- Bao, H.; Cao, J.; Kurths, J. State estimation of fractional-order delayed memristive neural networks. Nonlinear Dyn. 2018, 94, 1215–1225. [Google Scholar] [CrossRef]
- Wang, F.; Yang, Y.; Hu, M.; Xu, X. State estimation for fractional-order neural networks. Optik 2015, 126, 4083–4086. [Google Scholar] [CrossRef]
- Liu, T.; Wei, Y.; Yin, W.; Wang, Y.; Liang, Q. State estimation for nonlinear discrete–time fractional systems: A Bayesian perspective. Signal Process. 2019, 165, 250–261. [Google Scholar] [CrossRef]
- Gao, Z. Active disturbance rejection control for nonlinear fractional-order systems. Int. J. Robust Nonlinear Control. 2016, 26, 876–892. [Google Scholar] [CrossRef]
- Li, B.; Wang, Z.; Ma, L.; Liu, H. Observer-based event-triggered control for nonlinear systems with mixed delays and disturbances: The input-to-state stability. IEEE Trans. Cybern. 2018, 49, 2806–2819. [Google Scholar] [CrossRef]
- Wang, Y.; Ding, S.; Li, R. Master–slave synchronization of neural networks via event-triggered dynamic controller. Neurocomputing 2021, 419, 215–223. [Google Scholar] [CrossRef]
- Xing, X.; Liu, J. Event-triggered neural network control for a class of uncertain nonlinear systems with input quantization. Neurocomputing 2021, 440, 240–250. [Google Scholar] [CrossRef]
- Yang, H.; Wang, Z.; Shen, Y.; Alsaadi, F.E.; Alsaadi, F.E. Event-triggered state estimation for Markovian jumping neural networks: On mode-dependent delays and uncertain transition probabilities. Neurocomputing 2021, 424, 226–235. [Google Scholar] [CrossRef]
- Heemels, W.P.; Johansson, K.H.; Tabuada, P. An introduction to event-triggered and self-triggered control. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 3270–3285. [Google Scholar]
- Ge, X.; Han, Q.L.; Zhang, X.M.; Ding, L.; Yang, F. Distributed event-triggered estimation over sensor networks: A survey. IEEE Trans. Cybern. 2019, 50, 1306–1320. [Google Scholar] [CrossRef]
- Qin, J.; Ma, Q.; Shi, Y.; Wang, L. Recent advances in consensus of multi-agent systems: A brief survey. IEEE Trans. Ind. Electron. 2016, 64, 4972–4983. [Google Scholar] [CrossRef]
- Liu, Y.; Tang, R.; Zhou, C.; Xiang, Z.; Yang, X. Event-triggered leader-following consensus of multiple mechanical systems with switched dynamics. Int. J. Syst. Sci. 2020, 51, 3563–3572. [Google Scholar] [CrossRef]
- Yu, N.; Zhu, W. Event-triggered impulsive chaotic synchronization of fractional-order differential systems. Appl. Math. Comput. 2021, 388, 125554. [Google Scholar] [CrossRef]
- Shi, M.; Hu, S.; Yu, Y. Generalised exponential consensus of the fractional-order nonlinear multi-agent systems via event-triggered control. Int. J. Syst. Sci. 2019, 50, 1244–1251. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Gallegos, J.A.; Castro-Linares, R. Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systemsa. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 650–659. [Google Scholar] [CrossRef]
- Song, Q.; Chen, Y.; Zhao, Z.; Liu, Y.; Alsaadi, F.E. Robust stability of fractional-order quaternion-valued neural networks with neutral delays and parameter uncertainties. Neurocomputing 2021, 420, 70–81. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Zhang, S.; Yu, Y.; Wang, H. Mittag-Leffler stability of fractional-order Hopfield neural networks. Nonlinear Anal. Hybrid Syst. 2015, 16, 104–121. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef] [Green Version]
- Rihan, F.; Hashish, A.; Al-Maskari, F.; Hussein, M.; Ahmed, E.; Riaz, M.; Yafia, R. Dynamics of tumor-immune system with fractional-order. J. Tumor Res. 2016, 2, 109–115. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Li, B. Event-Triggered State Estimation for Fractional-Order Neural Networks. Mathematics 2022, 10, 325. https://doi.org/10.3390/math10030325
Xu B, Li B. Event-Triggered State Estimation for Fractional-Order Neural Networks. Mathematics. 2022; 10(3):325. https://doi.org/10.3390/math10030325
Chicago/Turabian StyleXu, Bingrui, and Bing Li. 2022. "Event-Triggered State Estimation for Fractional-Order Neural Networks" Mathematics 10, no. 3: 325. https://doi.org/10.3390/math10030325
APA StyleXu, B., & Li, B. (2022). Event-Triggered State Estimation for Fractional-Order Neural Networks. Mathematics, 10(3), 325. https://doi.org/10.3390/math10030325