Abstract
This paper discusses consensus control of nonlinear coupled parabolic PDE-ODE-based multi-agent systems (PDE-ODEMASs). First, a consensus controller of leaderless PDE-ODEMASs is designed. Based on a Lyapunov-based approach, coupling strengths are obtained for leaderless PDE-ODEMASs to achieve leaderless consensus. Furthermore, a consensus controller in the leader-following PDE-ODEMAS is designed and the corresponding coupling strengths are obtained to ensure the leader-following consensus. Two examples show the effectiveness of the proposed methods.
1. Introduction
Consensus in multi-agent systems (MASs) is to achieve a common group objective when agents have different initial states [1,2,3,4]. It has received great attention in the past decade as a result from its wide applications in flocking of mobile robots [5], opinion dynamics in social networks [6], formation of unmanned vehicles [7,8,9], microgrid energy management [10], traffic flow [11], etc.
In a pioneering contribution, many important control methods were proposed for consensus of MASs, focusing on models based on ordinary differential equations [12,13,14,15,16,17,18,19,20]. Actually, there are many practical cases in nature and discipline fields with spatio-temporal characteristics, modeled by coupled partial differential equations (PDEs) [21,22,23,24,25]. Applied to overhead cranes [26], hormonal therapy [27], traffic flow [28], etc., another class of spatio-temporal models is based on coupled partial differential equations—ordinary differential equations (PDE-ODEs) [29,30,31]. Therefore, it is important to research consensus control of PDE-based coupled MASs (PDEMASs) or coupled PDE-ODE-based MASs (PDE-ODEMASs).
More recently, there have been many important results related to PDEMASs. Ref. [32] studied a distributed adaptive controller of uncertain leader-following parabolic PDEMASs; ref. [33] studied consensus control for parabolic and second-order hyperbolic PDEMASs; ref. [34] studied distributed P-type iterative learning for PDEMASs with time delay; refs. [35,36] studied iterative learning control for PDEMASs without and with time delay; ref. [37] studied boundary control of 3-D PDEMASs with arbitrarily large boundary input delay; refs. [38,39] studied consensus and input constraint consensus of nonlinear PDEMASs using boundary control. However, consensus control for PDE-ODEMASs has not been addressed yet, which is a new challenge.
Motivated by the above, this paper studies consensus control of nonlinear coupled parabolic PDE-ODEMASs with Neumann boundary conditions. First, dealing with the leaderless case, a consensus controller of leaderless PDE-ODEMASs is designed. The leaderless consensus error system is obtained and one Lyapunov functional candidate is given. Using Wirtinger’s inequality and matrix properties, coupling strengths are obtained for leaderless PDE-ODEMASs to achieve cluster consensus. Furthermore, dealing with the leader-following case, a consensus controller of leader-following PDE-ODEMASs is designed. The leader-following consensus error system is obtained and another Lyapunov functional candidate is given. The corresponding coupling strengths are obtained to ensure leader-following consensus.
The remainder of this paper is organized as follows. The problem formulation is given in Section 2. Section 3 presents a consensus control design of the leaderless PDE-ODEMAS and Section 4 gives that of the leader-following PDE-ODEMAS. An example to illustrate the effectiveness of the proposed method is presented in Section 5 and Section 6 offers some concluding remarks.
Notations: stand for the maximum eigenvalue and smallest nonzero eigenvalue of ·, respectively. ⊗ is a Kronecker product of matrices. The identity matrix of n order is denoted by . denotes the Euclidean norm for vectors in or the induced 2-norm for matrices in .
2. Problem Formulation
Consider a nonlinear PDE-ODEMAS as
such that
where , respectively, mean the spatial variable and time variable; are the states; are the control inputs; are bounded and is continuous; is a positive scalar; ; and are sufficiently smooth nonlinear functions.
Define consensus error and .
Definition 1.
Lemma 1
([40]). Let κ be a differentiable function with and , then
Lemma 2
([41]). For an undirected connected graph with Laplacian matrix L, and such that , then
If Laplacian matrix is symmetric, then . The smallest nonzero eigenvalue of is known as the algebraic connectivity of graphs [41].
Assumption A1.
Assume satisfy the Lipschitz condition, i.e., for any and , there exist scalars such that
3. Consensus Control of the Leaderless PDE-ODEMAS
To achieve consensus of the leaderless PDE-ODEMAS (1), the consensus controller is designed as:
where d and k are the coupling strengths to be determined, . Assume that the topological structure is defined as: if the agent i connects to j, otherwise ; . The topological structure is defined the same as A.
Theorem 1.
Proof.
Consider the following Lyapunov function as
We have
According to the matrix property,
and
where denotes the smallest nonzero eigenvalue of ·, when , , when , . Therefore, , are Laplacian matrices. Using Lemma 1, for ,
Using Assumption 1, owing to and , we have
and
In the same way,
and
4. Consensus Control of the Leader-Following PDE-ODEMAS
The leader agent is supposed to be
such that
where are bounded and is continuous.
The leader-following consensus controller is designed as:
where if can obtain the information of ; otherwise, ; and if can obtain the information of ; otherwise, .
Let and . The leader-following consensus error system is obtained as
such that
where , and .
Definition 2.
Theorem 2.
Proof.
Consider the Lyapunov functional candidate as
One has
Since G and H are symmetric positive definite matrices,
and
where , , denotes the smallest nonzero eigenvalue and G, H are symmetric positive definite matrices.
In a similar way to the analysis in Theorem 1, the proof can be completed. □
Remark 1.
Many papers have investigated stabilization control methods for PDE-ODE systems [29,30,31,42], while this paper investigates consensus control for PDE-ODE-based MASs, considering control based on coupling.
Remark 2.
Many significant results were obtained for consensus control modeled by PDEMASs [32,33,34,35,36,37,38,39]. Different from PDEMASs, this paper investigates consensus control methods for PDE-ODEMASs, as well as considering leaderless and leader-following models.
5. Numerical Simulation
Example 1.
Consider the leaderless PDE-ODEMAS (1) and (2) with coefficients as
and with random initial conditions.
It is obvious that , and satisfy the Lipschitz condition with .
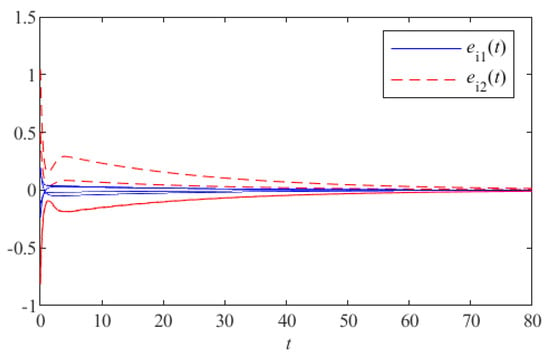
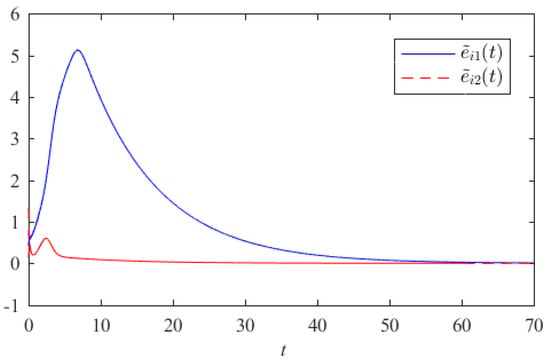
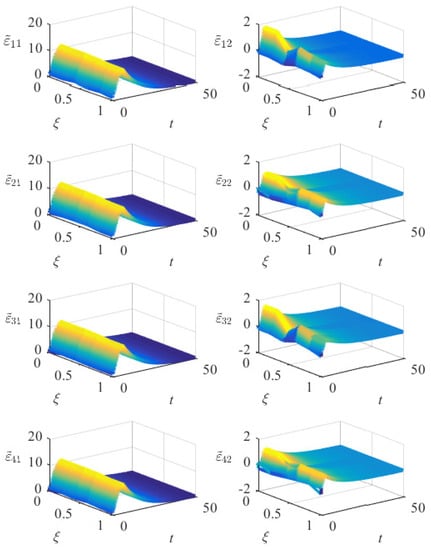
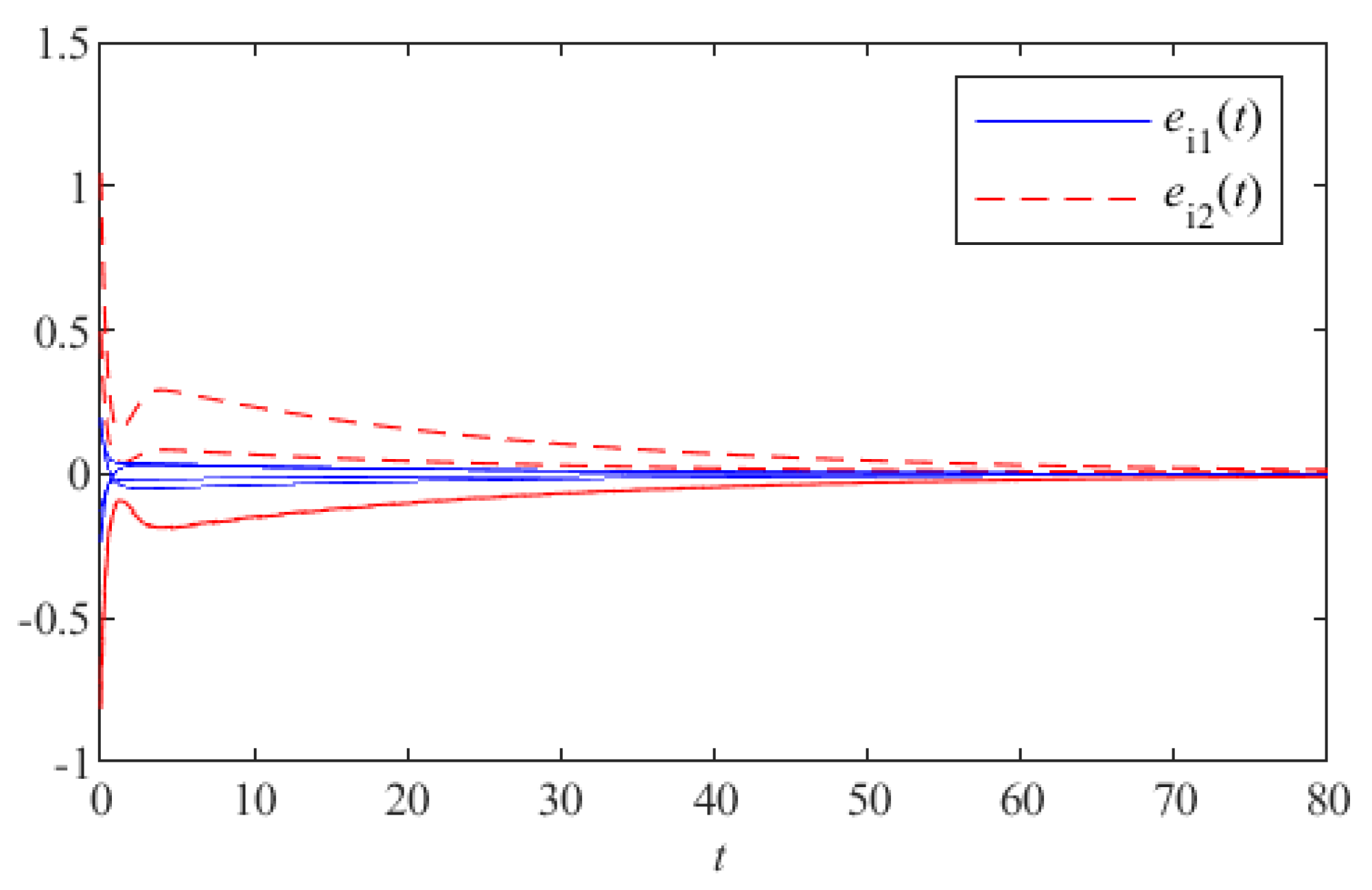
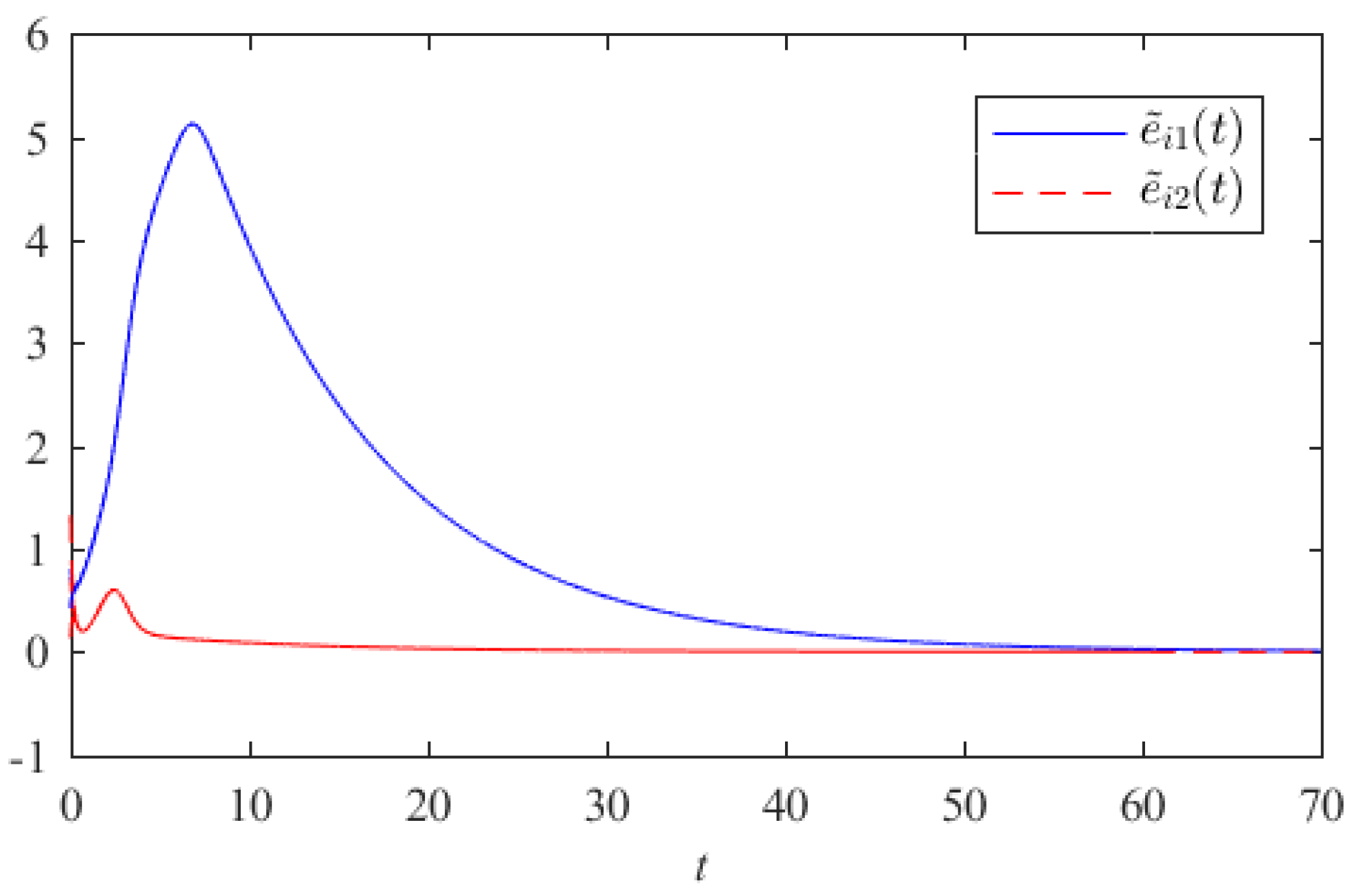
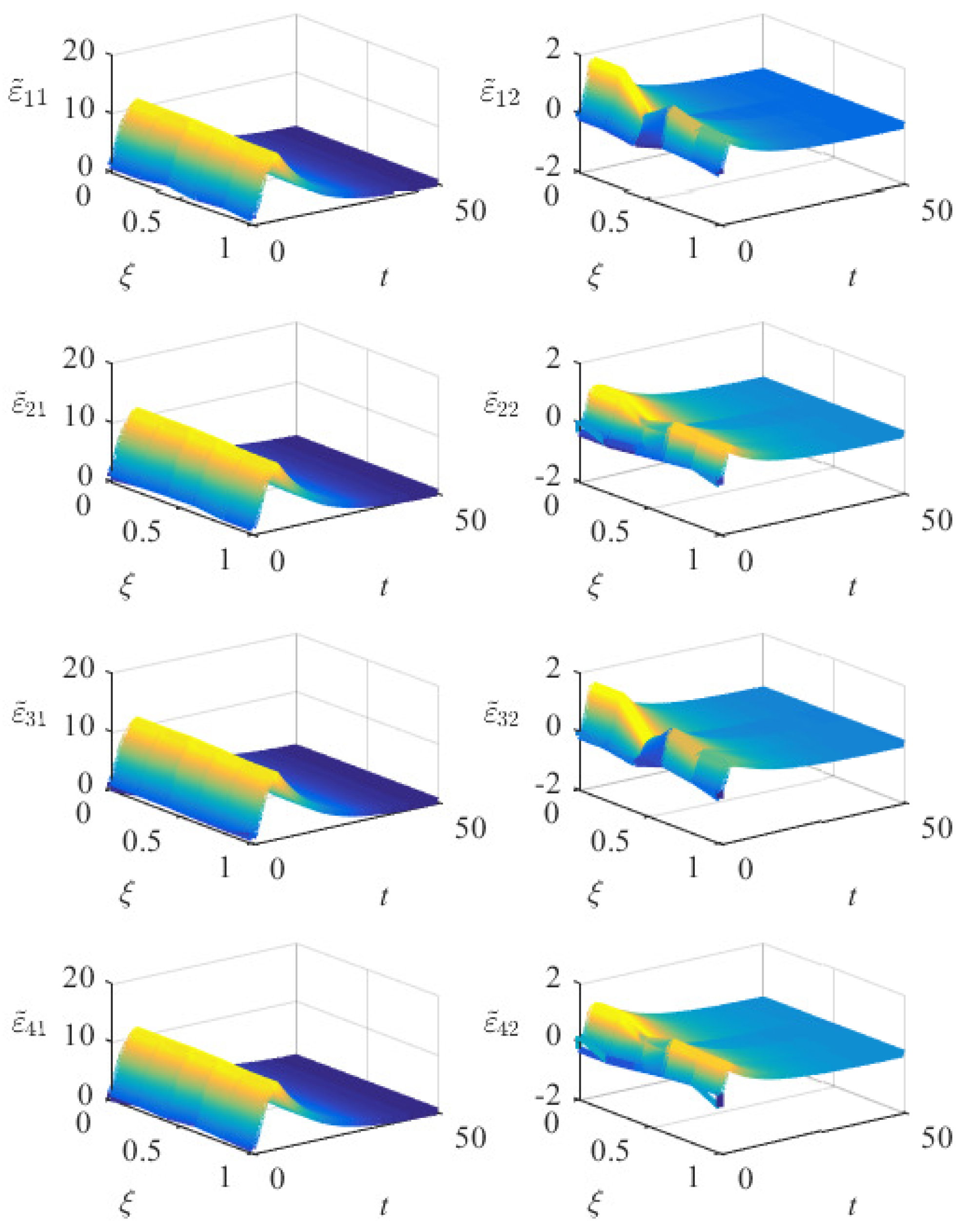
With Theorem 1, according to (10), and are obtained. Therefore, we take and . It can be seen in Figure 1 and Figure 2 that the leaderless PDE-ODEMAS achieves consensus with control gains and .
Figure 1.
withthe control gains and in Example 1.
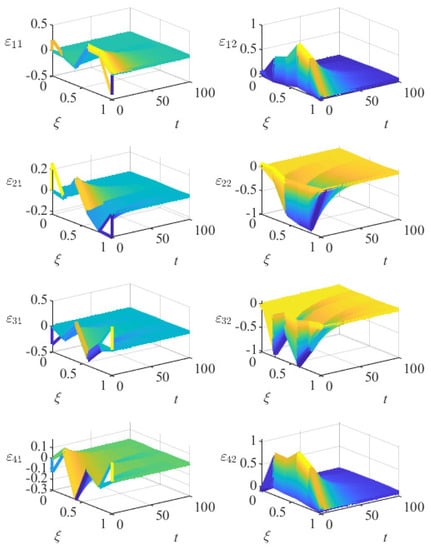
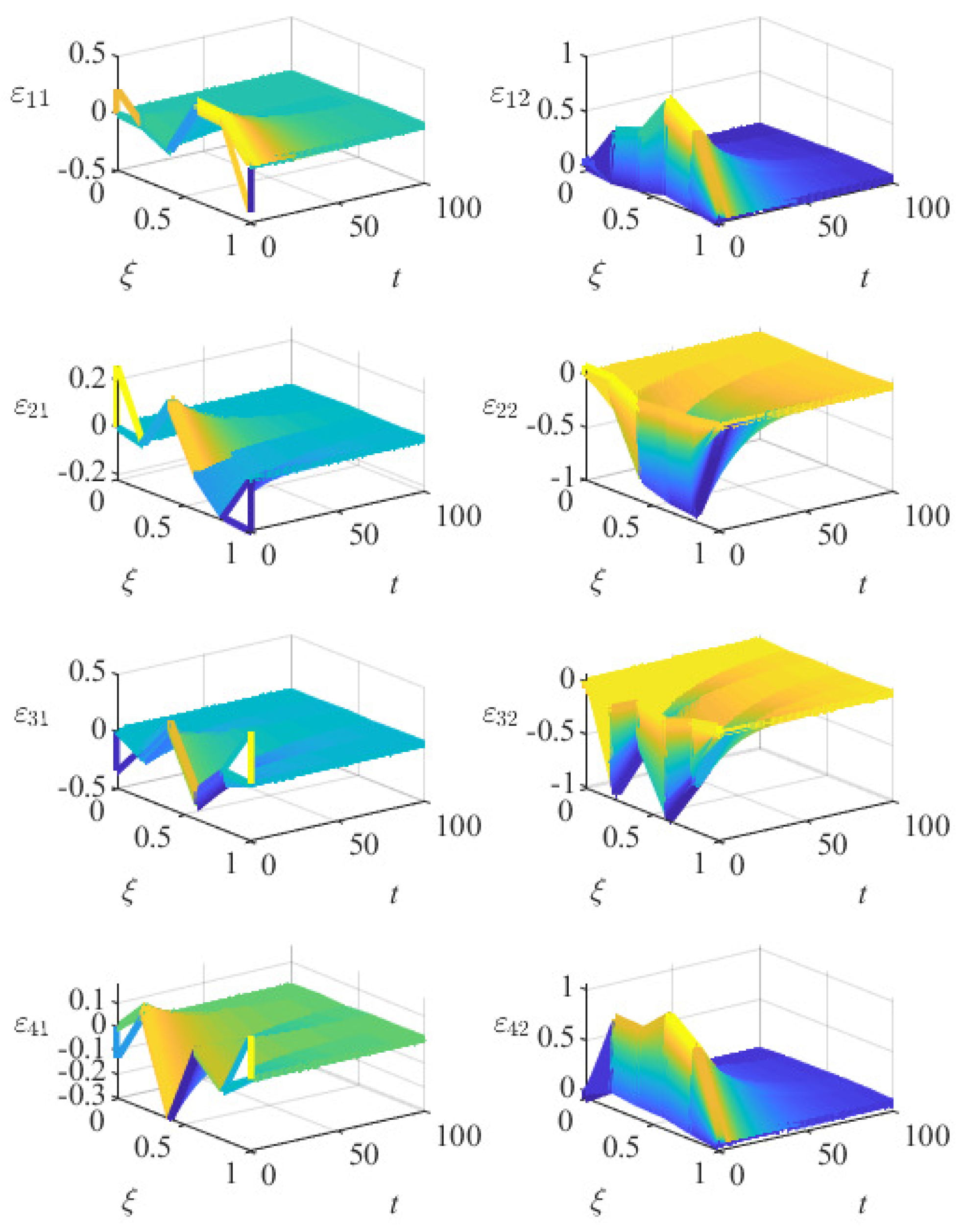
Figure 2.
with the control gains and in Example 1.
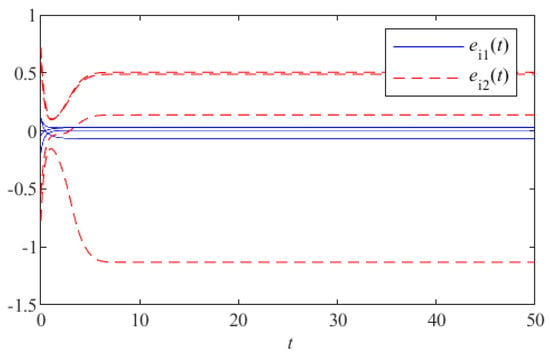
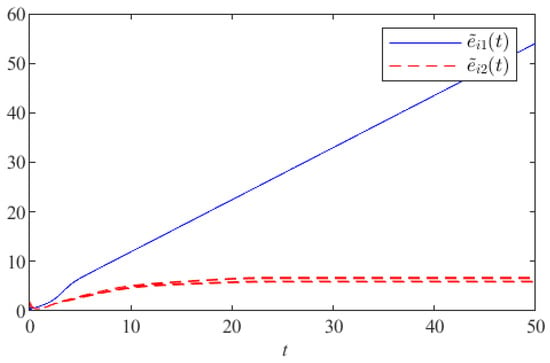
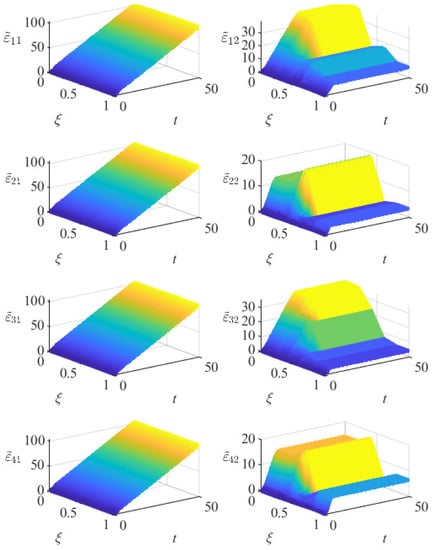
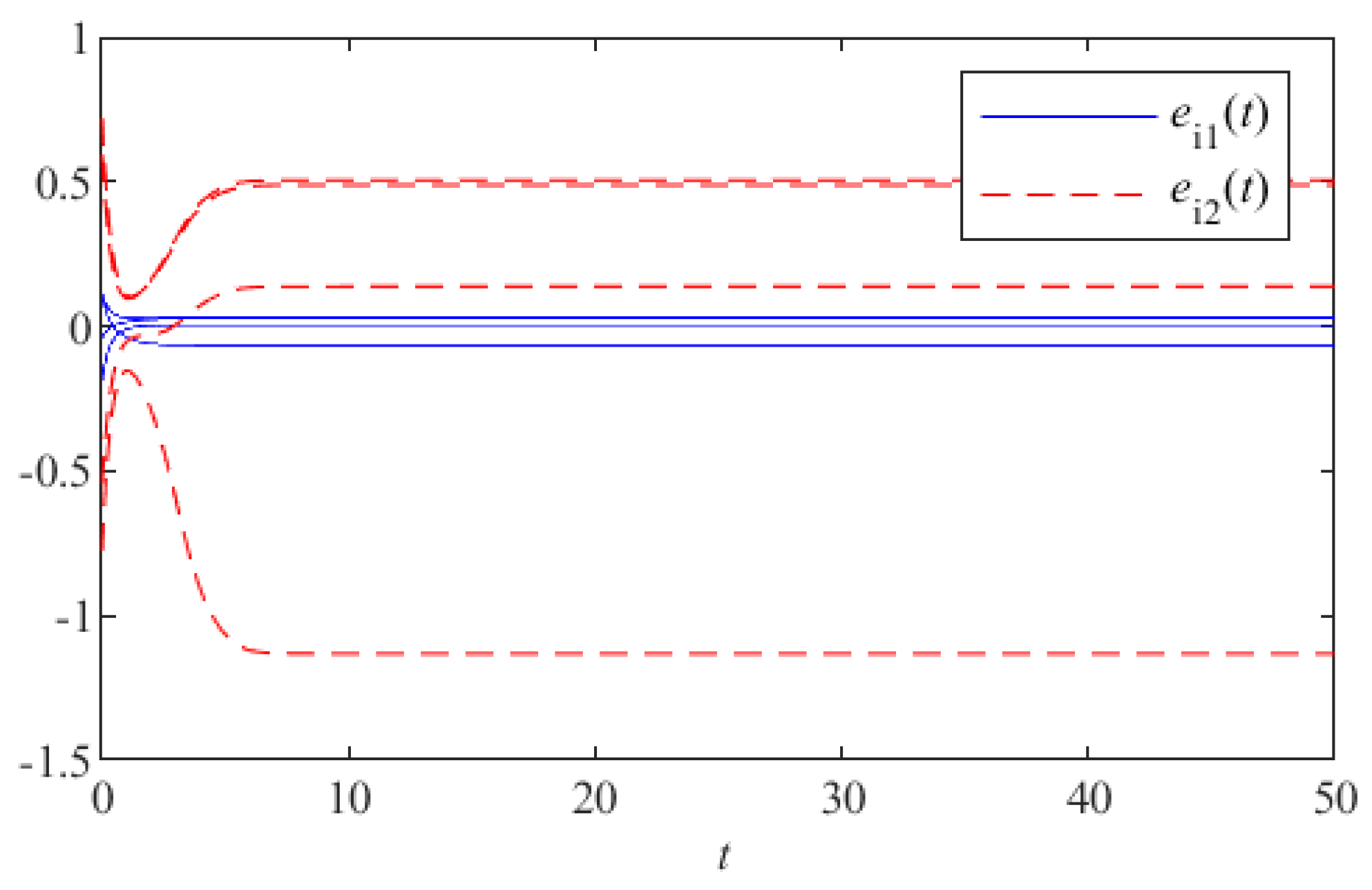
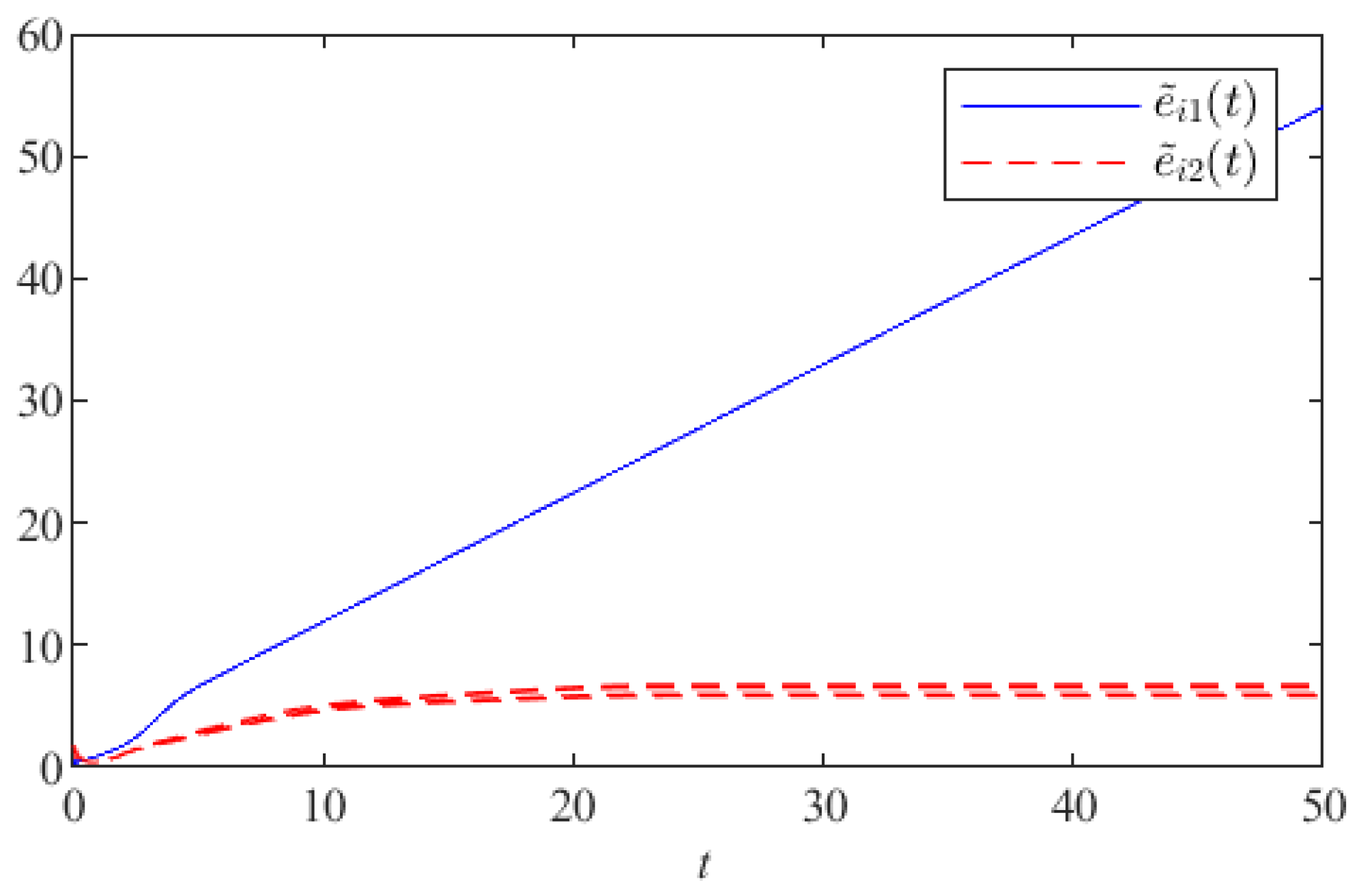
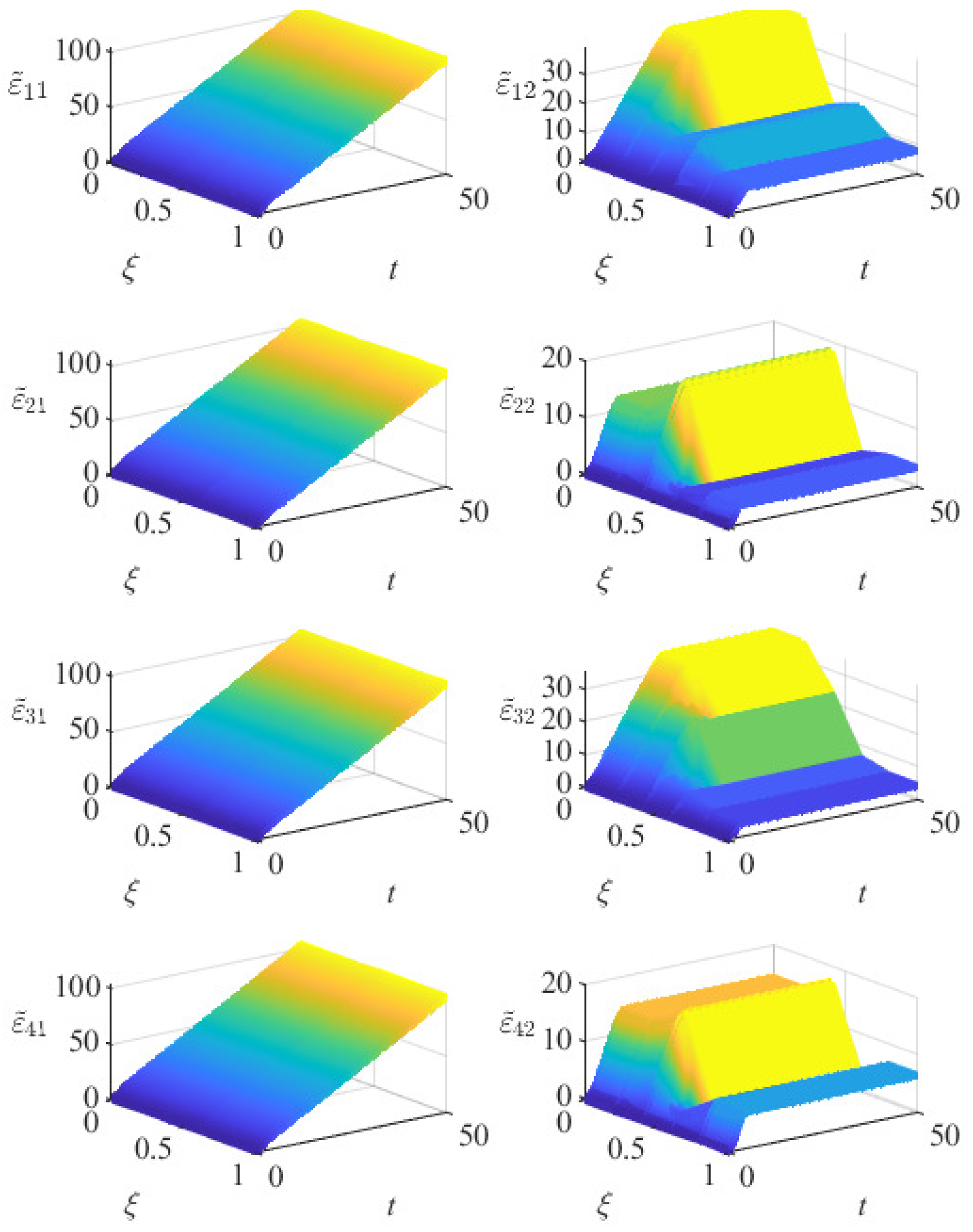
From another point of view, and do not satisfy (10). It can be seen in Figure 3 and Figure 4 that the leaderless PDE-ODEMAS cannot achieve consensus with control gains and .
Figure 3.
with the control gains and in Example 1.
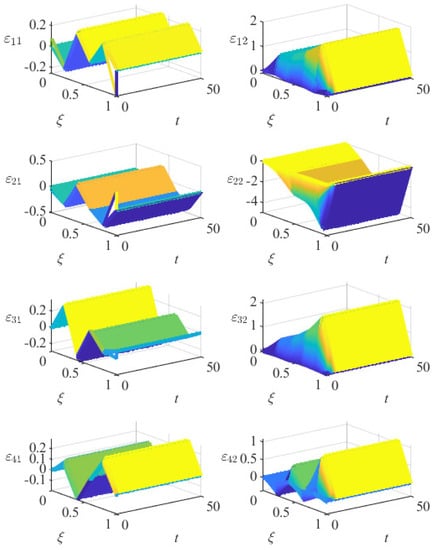
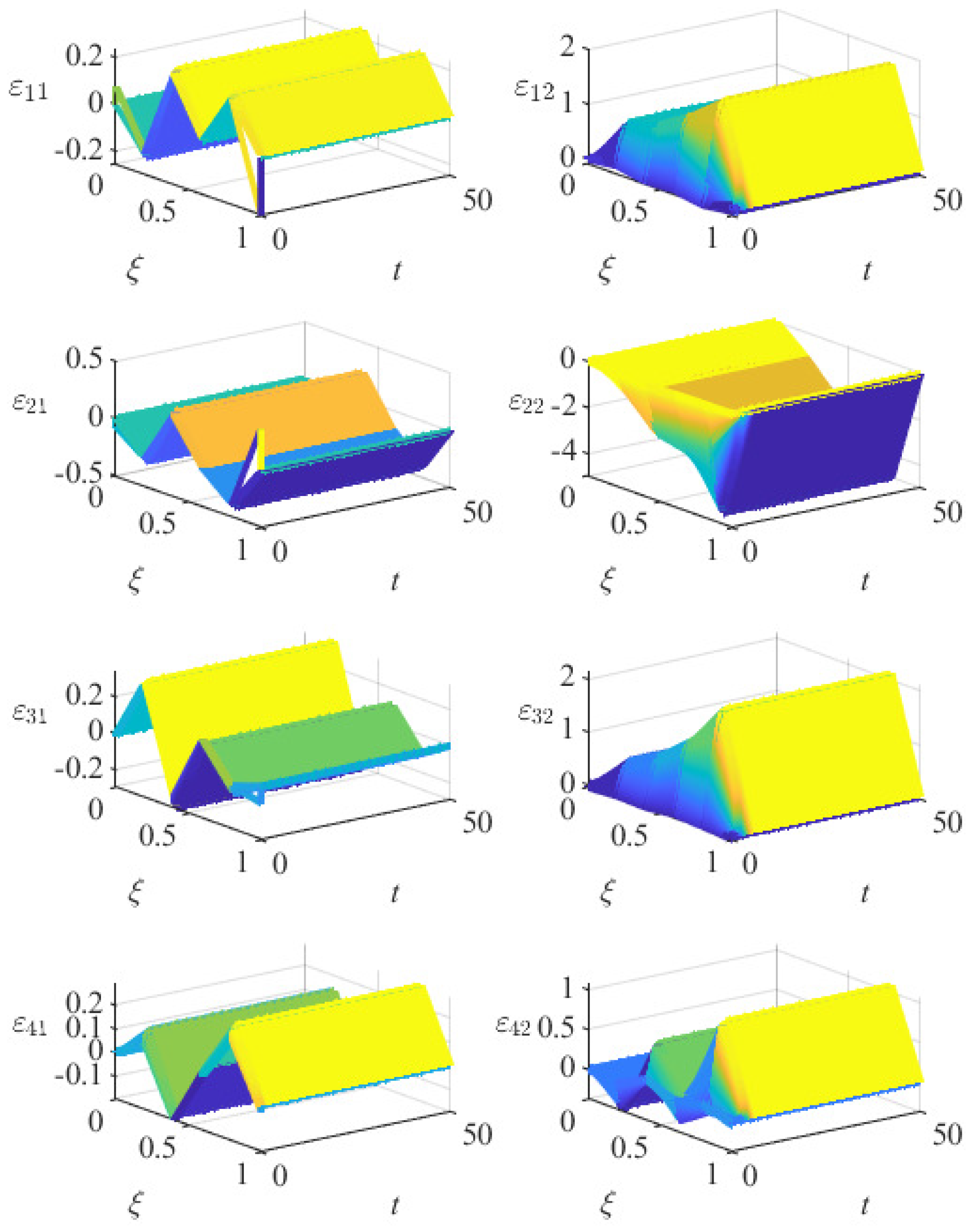
Figure 4.
with the control gains and in Example 1.
Example 2.
Consider a nonlinear leader-following PDE-ODEMAS composed of 1 leader agent (22) and (23) and 4 following agents (1) and (2) with coefficients the same as Example 1. In the same way, are obtained. Choose . With Theorem 2, according to (28), and are obtained. Therefore, we take and . It can be seen in Figure 5 and Figure 6 that the leader-following PDE-ODEMAS achieves consensus.
Figure 5.
with the control gains and in Example 2.
Figure 6.
with the control gains and in Example 2.
From another point of view, and do not satisfy (28). It can be seen in Figure 7 and Figure 8 that the leader-following PDE-ODEMAS cannot achieve consensus with control gains and .
Figure 7.
with the control gains and in Example 2.
Figure 8.
with control gains and in Example 2.
6. Conclusions
This paper has studied consensus control of the PDE-ODEMASs. First, a consensus controller of the leaderless PDE-ODEMASs was designed. We have shown that the cluster consensus behavior can be reached for the given coupling strengths for the leaderless PDE-ODEMASs. Then, a consensus controller in the leader-following PDE-ODEMASs was designed. Leader-following consensus behavior can be arrived at for the given coupling strengths for the leader-following PDE-ODEMASs. In numerical simulations, it shows the obtained gains according to the proposed methods can ensure consensus of both leaderless and leader-following PDE-ODEMASs. On the contrary, the control with gains a little bit less than those according to the proposed methods cannot achieve consensus. There are often a great number of agents in the real world and, in future, pinning consensus, only controlling a few agents of the PDE-ODEMASs, will be studied, as well as time delays.
Author Contributions
Methodology, A.Z.; software, K.Y. and Y.J.; writing—original draft preparation, X.N.; writing—review and editing, C.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Major Science and Technology Special Project of Yunnan Province under grant number 202102AD080002, by the Natural Science Foundation of Shandong Province under grant number ZR2019YQ28, the Development Plan of Youth Innovation Team of Universities in Shandong Province under grant number 2019KJN007.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Mo, L.; Yuan, X.; Yu, Y. Neuro-adaptive leaderless consensus of fractional-order multi-agent systems. Neurocomputing 2019, 339, 17–25. [Google Scholar] [CrossRef]
- Benediktsson, J.A.; Swain, P.H. Consensus theoretic classification methods. IEEE Trans. Syst. Man Cybern. 1992, 22, 688–704. [Google Scholar] [CrossRef]
- Yang, Y.; Ji, Z.; Tian, L.; Ma, H.; Qi, Q. Bipartite consensus of edge dynamics on coopetition multi-agent systems. Sci. China Inf. Sci. 2019, 62, 229201. [Google Scholar]
- Tian, B.; Lu, H.; Zuo, Z.; Yang, W. Fixed-time leader–follower output feedback consensus for second-order multiagent systems. IEEE Trans. Cybern. 2018, 49, 1545–1550. [Google Scholar] [CrossRef]
- Ning, B.; Han, Q.L. Prescribed finite-time consensus tracking for multiagent systems with nonholonomic chained-form dynamics. IEEE Trans. Autom. Control 2018, 64, 1686–1693. [Google Scholar] [CrossRef]
- Proskurnikov, A.V.; Matveev, A.S.; Cao, M. Opinion dynamics in social networks with hostile camps: Consensus vs. polarization. IEEE Trans. Autom. Control 2015, 61, 1524–1536. [Google Scholar] [CrossRef] [Green Version]
- Du, H.; Zhu, W.; Wen, G.; Duan, Z.; Lu, J. Distributed formation control of multiple quadrotor aircraft based on nonsmooth consensus algorithms. IEEE Trans. Cybern. 2017, 49, 342–353. [Google Scholar] [CrossRef]
- Cheng, Y.; Jia, R.; Du, H.; Wen, G.; Zhu, W. Robust finite-time consensus formation control for multiple nonholonomic wheeled mobile robots via output feedback. Int. J. Robust Nonlinear Control 2018, 28, 2082–2096. [Google Scholar] [CrossRef]
- Shi, S.; Xu, S.; Feng, H. Robust fixed-time consensus tracking control of high-order multiple nonholonomic systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1869–1880. [Google Scholar] [CrossRef]
- Zheng, Y.; Song, Y.; Hill, D.J.; Zhang, Y. Multiagent system based microgrid energy management via asynchronous consensus admm. IEEE Trans. Energy Convers. 2018, 33, 886–888. [Google Scholar] [CrossRef]
- Kušić, K.; Ivanjko, E.; Vrbanić, F.; Greguric, M.; Dusparic, I. Spatial-Temporal Traffic Flow Control on Motorways Using Distributed Multi-Agent Reinforcement Learning. Mathematics 2021, 9, 3081. [Google Scholar] [CrossRef]
- Nowzari, C.; Garcia, E.; Cortés, J. Event-triggered communication and control of networked systems for multi-agent consensus. Automatica 2019, 105, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Zong, X.; Li, T.; Zhang, J.F. Consensus conditions of continuous-time multi-agent systems with time-delays and measurement noises. Automatica 2019, 99, 412–419. [Google Scholar] [CrossRef] [Green Version]
- Tan, X.; Cao, J.; Rutkowski, L.; Lu, G. Distributed dynamic self-triggered impulsive control for consensus networks: The case of impulse gain with normal distribution. IEEE Trans. Cybern. 2021, 51, 624–634. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Dong, S.; Chen, G.; Liu, M.; Wu, Z. Cooperative neural-adaptive fault-tolerant output regulation for heterogeneous nonlinear uncertain multiagent systems with disturbance. Sci. China Inf. Sci. 2021, 64, 172212. [Google Scholar]
- Li, X.; Tang, Y.; Karimi, H.R. Consensus of multi-agent systems via fully distributed event-triggered control. Automatica 2020, 116, 108898. [Google Scholar] [CrossRef]
- Li, X.; Yu, Z.; Li, Z.; Wu, N. Group consensus via pinning control for a class of heterogeneous multi-agent systems with input constraints. Inf. Sci. 2021, 542, 247–262. [Google Scholar] [CrossRef]
- De la Sen, M.; Alonso-Quesada, S. On finite-time consensus objectives in time-varying interconnected discrete linear dynamic systems under internal and external delays. Adv. Mech. Eng. 2018, 10, 1687814018784840. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Aman, B.; Ciobanu, G. Knowledge dynamics and behavioural equivalences in multi-agent systems. Mathematics 2021, 9, 2869. [Google Scholar] [CrossRef]
- Wang, J.W.; Wang, J.M. Mixed H2/H∞ sampled-data output feedback control design for a semi-linear parabolic PDE in the sense of spatial L∞ norm. Automatica 2019, 103, 282–293. [Google Scholar] [CrossRef]
- Chen, P.; Villa, U.; Ghattas, O. Taylor approximation and variance reduction for pde-constrained optimal control under uncertainty. J. Comput. Phys. 2019, 385, 163–186. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Vazquez, R.; Krstic, M. Folding backstepping approach to parabolic PDE bilateral boundary control. IFAC-PapersOnLine 2019, 52, 76–81. [Google Scholar] [CrossRef]
- Buyukkocak, A.T.; Aksaray, D.; Yazcoglu, Y. Planning of heterogeneous multi-agent systems under signal temporal logic specifications with integral predicates. IEEE Robot. Autom. Lett. 2021, 6, 1375–1382. [Google Scholar] [CrossRef]
- Wang, G.; Huang, Y.; Wang, X. Consensus of semi-markov multi-agent systems with stochastically unmatched topologies. IET Control Theory Appl. 2021, 15, 1003–1017. [Google Scholar] [CrossRef]
- d’Andréa-Novel, B.; Coron, J.M. Exponential stabilization of an overhead crane with flexible cable via a back-stepping approach. Automatica 2000, 36, 587–593. [Google Scholar] [CrossRef]
- Hiruko, K.; Okabe, S. Controllability of hybrid PDE-ODE systems with structural instability and applications to mathematical models on intermittent hormonal therapy for prostate cancer. Math. Methods Appl. Sci. 2018, 41, 8229–8247. [Google Scholar] [CrossRef]
- Lattanzio, C.; Maurizi, A.; Piccoli, B. Moving bottlenecks in car traffic flow: A PDE-ODE coupled model. SIAM J. Math. Anal. 2011, 43, 50–67. [Google Scholar] [CrossRef]
- Wang, J.W.; Wu, H.N. Exponentially stabilizing fuzzy controller design for a nonlinear ODE-beam cascaded system and its application to flexible air-breathing hypersonic vehicle. Fuzzy Sets Syst. 2020, 385, 127–147. [Google Scholar] [CrossRef]
- Meglio, F.D.; Argomedo, F.B.; Hu, L.; Krstic, M. Stabilization of coupled linear heterodirectional hyperbolic PDE-ODE systems. Automatica 2018, 87, 281–289. [Google Scholar]
- Zhao, Y.; Gao, H.; Qiu, J. Fuzzy observer based control for nonlinear coupled hyperbolic PDE-ODE systems. IEEE Trans. Fuzzy Syst. 2019, 27, 1332–1346. [Google Scholar] [CrossRef]
- He, P. Consensus of uncertain parabolic PDE agents via adaptive unit-vector control scheme. IET Control Theory Appl. 2018, 12, 2488–2494. [Google Scholar] [CrossRef]
- Fu, Q.; Du, L.; Xu, G.; Wu, J.; Yu, P. Consensus control for multi-agent systems with distributed parameter models. Neurocomputing 2018, 25, 58–64. [Google Scholar] [CrossRef]
- Dai, X.; Wang, C.; Tian, S.; Huang, Q. Consensus control via iterative learning for distributed parameter models multi-agent systems with time-delay. J. Frankl. Inst. 2019, 356, 5240–5259. [Google Scholar] [CrossRef]
- Fu, Q.; Du, L.; Xu, G.; Wu, J. Consensus control for multi-agent systems with distributed parameter models via iterative learning algorithm. J. Frankl. Inst. 2018, 355, 4453–4472. [Google Scholar] [CrossRef]
- Lan, Y.-H.; Wu, B.; Shiy, Y.-X.; Luo, Y.-P. Iterative learning based consensus control for distributed parameter multi-agent systems with time-delay. Neurocomputing 2019, 357, 77–85. [Google Scholar] [CrossRef]
- Qi, J.; Wang, S.; Fang, J.-A.; Diagne, M. Control of multi-agent systems with input delay via PDE-based method. Automatica 2019, 106, 91–100. [Google Scholar] [CrossRef]
- Yang, C.; He, H.; Huang, T.; Zhang, A.; Qiu, J.; Cao, J.; Li, X. Consensus for non-linear multi-agent systems modelled by PDEs based on spatial boundary communication. IET Control Theory Appl. 2017, 11, 3196–3200. [Google Scholar] [CrossRef]
- Yang, C.; Huang, T.; Zhang, A.; Qiu, J.; Cao, J.; Alsaadi, F.E. Output consensus of multiagent systems based on PDEs with input constraint: A boundary control approach. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 370–377. [Google Scholar] [CrossRef]
- Seuret, A.; Gouaisbaut, F. Jensen’s and Wirtinger’s inequalities for time-delay systems. IFAC Proc. Vol. 2013, 46, 343–348. [Google Scholar] [CrossRef] [Green Version]
- Pilloni, A.; Pisano, A.; Orlov, Y.; Usai, E. Consensus-based control for a network of diffusion PDEs with boundary local interaction. IEEE Trans. Autom. Control 2015, 61, 2708–2713. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.W.; Krstic, M. Output-feedback boundary control of a heat PDE sandwiched between two ODEs. IEEE TRansactions Autom. Control 2019, 64, 4653–4660. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).