Abstract
This paper proposes a new fractional-order model reference adaptive control (FOMRAC) framework for a fractional-order multivariable system with parameter uncertainty. The designed FOMRAC scheme depends on a fractional-order nonlinear scalar update law. Specifically, the scalar update law does not change as the input–output dimension changes. The main advantage of the proposed adaptive controller is that only one parameter online update is needed such that the computational burden in the existing FOMRAC can be relieved. Furthermore, we show that all signals in this adaptive scheme are bounded and the mean value of the squared norm of the error converges to zero. Two illustrative numerical examples are presented to demonstrate the efficiency of the proposed control scheme.
Keywords:
fractional-order model reference adaptive control (FOMRAC); multivariable; fractional-order nonlinear scalar update law; stability analysis MSC:
26A33; 93C40
1. Introduction
Over the past few decades, there have been considerable efforts towards linear systems with parameter uncertainty. Adaptive control has been one of the methods to solve this uncertainty. Among various adaptive control techniques, model reference adaptive control (MRAC) is the most popular and mature method, which provides feedback controller structures and adaptive laws for the control of systems to ensure that the closed-loop signals are bounded and the output or the state of the uncertain plant can asymptotically track the output or the state of the desired reference model, despite the uncertainties of the system parameters [1,2].
Fractional calculus has captured the attention of many scientists and engineers working in a variety of fields in recent years [3,4,5,6,7]. This is mostly owing to its ability to more accurately model specific physical systems than the traditional integer-order option, such as manipulator systems, multi-area power systems, multisource renewable energy systems, and electrical vehicles [8,9,10,11,12]. On the other hand, it is suitable for describing hereditary and memorial properties of various processes for which traditional integer-order differential equations fail to capture relevant phenomena, such as heat conduction and viscoelastic mechanics in materials with memory, and Zika virus transmission [13,14,15,16,17,18]. The expansion of MRAC to fractional-order systems, known as FOMRAC, has been proposed in the literature for more than a decade. Many useful results and applications for FOMRAC are studied based on a single-input single-output (SISO) plant. Among them, Shi et al. [19] proved the stability of the closed-loop control system strictly based on the continuous frequency distributed model. Then, a fractional-order composite MRAC was developed in [20] by incorporating the parameter estimate error into the parameter updating law to achieve better performance.
Recently, the FOMRAC for multiple-input-multiple-output (MIMO) systems has been studied in the works of Norelys Aguila-Camacho and Manuel A. Duarte-Mermoud [21,22,23,24]. For example, in Ref. [21], they have proposed the standard fractional-order update laws and proved the Lyapunov stability of a fractional-order MIMO MRAC system by using a series of fractional inequalities. In Ref. [22], they further proved the convergence to zero of the mean value of the squared norm of the output error. In particular, the order of the plant and the adaptive laws in the above results are the same. In Ref. [24], they proposed the fractional-order update laws whose order is smaller than that of the plant. However, the above results usually require online estimation of multiple unknown parameters, and as the input–output dimension of the FOMRAC system increases, the number of parameters that need to be updated online also increases, which greatly increases the computational burden and limits the practicality of FOMRAC. Therefore, the issue of how to reduce the number of parameters estimated online is a critical problem to be solved for the MIMO FOMRAC system.
In this article, a new FOMRAC framework is proposed for fractional-order multivariable systems with parameter uncertainty. The proposed fractional-order adaptive controller with state feedback depends on a fractional-order nonlinear scalar update law. Specifically, the scalar update law does not change as the input–output dimension changes. The major contributions of this paper can be formulated as follows:
- we design a new FOMRAC scheme to handle the parameter uncertainty and to ensure the system error stability and closed-loop signal boundedness;
- using the proposed FOMRAC framework, only one parameter online update is needed such that the control scheme is computationally inexpensive;
- we conduct a complete theoretical analysis of the boundedness of all signals involved in this adaptive scheme and the convergence to zero of the mean value of the squared norm of the system error for the proposed control architecture;
- we verify the effectiveness of this control design by two illustrative numerical examples.
This paper is organized as follows. Section 2 briefly gives some basic concepts about fractional calculus and some necessary lemmas. Section 3 presents the FOMRAC problem. The adaptive controller based on a fractional-order scalar update law and the stability analysis for the adaptive control architecture are shown in the main results given in Section 4. Section 5 presents two numerical examples to clarify the validity of the proposed approach. Section 6 contains the conclusions and future works.
2. Preliminaries
This section introduces some fundamental concepts of fractional calculus, as well as some properties of fractional operators that will be used throughout the paper.
Notation. The following notations are used throughout the whole paper. Let R and denote the set of real, non-negative real numbers, respectively. denotes the set of real column vectors, denotes the set of real matrices. The matrix P is symmetric if . denotes the positive definite matrix P. denotes the trace of the matrix A.
Definition 1.
Riemann–Liouville fractional integral [3].
where is the Gamma function.
Definition 2.
Caputo Fractional Derivative [3].
with , .
The following lemmas will be used to prove the main results in this paper.
Lemma 1
([23]). Let be a vector of differentiable functions. Then, for all , the following relationship holds
where , and , satisfying .
Lemma 2
([23]). Let be a time-varying differentiable matrix. Then, for any time instant , the following relationship holds
Lemma 3
([22]). Let be a bounded nonnegative function. If there exists some such that
then
3. FOMRAC Problem
Consider a fractional-order MIMO plant with parameter uncertainty given by
where is a measurable state vector, is the control input and the fractional order . In addition, is an unknown constant state matrix capturing the parameter uncertainty in the fractional-order MIMO plant, and denotes a known control matrix. For the well-posedness of the FOMRAC problem, we assume that the pair is controllable. Recall that the controllability conditions ensure that the control input has sufficient access to the internal state to stabilize all unstable modes of a plant.
In addition, the fractional-order reference model is chosen by
where is a reference state vector, is Hurwitz and known, is known and is bounded and piecewise continuous. It is assumed that , for all , represents the desired trajectory for .
The objective of the FOMRAC is to design a feedback controller such that all the signals remain bounded and, ideally, the state of the uncertain system can track the state of the reference model asymptotically.
Next, define an ideal feedback controller that perfectly eliminates the uncertainty and allows to follow as
Here, , are the ideal control gains chosen such that the matching conditions
and
hold. Since is known, K can be obtained directly from the matching condition (11). Since is unknown, is also unknown.
The actual adaptive controller is an estimate of the ideal controller, with the purpose of approaching the ideal controller in the limit. Let
be the actual adaptive controller, where is the estimate of .
Now, define the estimation error as . Then, the closed-loop plant model can be written as
Let be the tracking error. Then, the tracking error equation is expressed as
The goal of FOMRAC is changed to design the adaptive laws to adjust in such a way that all the closed-loop signals remain bounded and ideally .
In 2015, Duarte-Mermoud, M. A. et al. [23] designed the standard fractional-order update laws
where is a positive definite symmetric matrix satisfying the Lyapunov equation
where Q∈ is positive definite. Since is a Hurwitz constant matrix, it follows from converse Lyapunov theory [25,26] that, for any given matrix , there exists a unique matrix that satisfies the Lyapunov Equation (16). Recently, Aguila-Camacho, N. et al. [24] designed the fractional-order update laws for as
where . This denotes that the order of the adaptive laws can be smaller than the order of the plant. Specifically, when the plant under control is of integer order, the adaptive laws can be fractional, which is one of the most promising applications from the practical point of view.
In the above works, is an adaption parameter matrix satisfying update laws, where m and n are the dimension of the input and output, respectively. However, as the input–output dimension of the FOMRAC system increases, the number of parameters that need to be updated online also increases, which greatly increases the computational burden of the online part and limits the practicality of FOMRAC. Therefore, how to reduce the number of parameters estimated online is a critical problem to be solved for the MIMO FOMRAC system.
4. Main Results
Following the analysis above, we aim to explore an adaptive control architecture aiming at mitigating the the number of parameters to be updated online in FOMRAC. To achieve this, we design the fractional-order scalar function . Then, , where is a designed non-zero parameter matrix. Now, in order to determine the scalar update law for FOMRAC, let the estimation error have the form provided by . The equations of the plant model and the tracking error can thus be written as
and
respectively.
The main finding of this research is stated in the following theorem.
Theorem 1.
Consider the uncertain fractional-order multivariable system described by (7), the reference model given by (8) and the feedback controller given by (12). If the parameter update laws are constructed as
with the scalar update law
where is the the tracking error, and is a positive-definite solution of the Lyapunov Equation (16), then it holds that:
- (i)
- The tracking error , the scalar function , the system state , the estimation error and parameter remain bounded for all ;
- (ii)
- The mean value of converges to zero when .
Proof.
Consider the quadratic Lyapunov function given by
where satisfies (16), and note that . Since , for all .
According to Lemmas 1 and 2, we can obtain the -order Caputo derivative of as follows:
Now, substituting (19) and (16) into (23), we can obtain that
If the scalar update law is designed as (21), then we can infer that
Accordingly,
Applying the fractional integral of order to inequality (26), we can obtain that
Since , , then
Considering the boundedness of initial values for , , then inequality (28) implies that and remain bounded for all . Since , and the boundedness of , then system state and estimation error are bounded for all . Accordingly, parameter is bounded for all .
Since and are bounded, then it can be obtained that . Then, using Lemma 3, we can conclude that
Accordingly, the mean value of converges to zero when , and this completes the proof. □
A block diagram showing the adaptive control framework based on the fractional-order scalar update law is given in Figure 1.
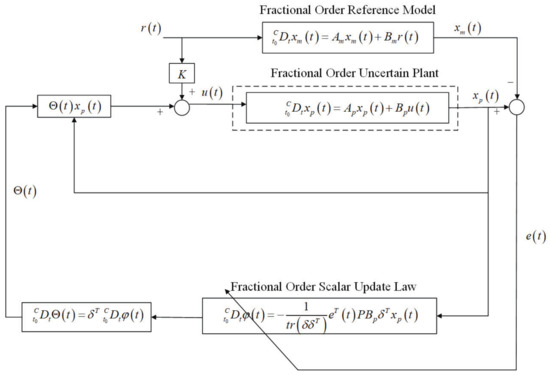
Figure 1.
Visualization of the adaptive control framework with the fractional-order scalar update law.
5. Simulation Example
In this section, we present two numerical examples to demonstrate the utility of the proposed adaptive control scheme. The scheme was implemented in Matlab/Simulink, using the FOMCON Toolbox to obtain the required results.
Example 1.
Let us consider a MIMO fractional-order linear time-invariant plant with parameter uncertainty, which is given by
where . Here, is an unknown constant state matrix that denotes the parameter uncertainty. For simulation purposes, the true .
For this study, we choose the reference model given by
where . Consequently, the ideal control gains become and .
For this case, matrices and exist such that .
Further, we choose for the proposed fractional-order nonlinear scalar update law given by (21). Then, the update law of is
where
For convenience, the reference signal is chosen as the unit step signal and the fractional order used is . Then, we have the following numerical results displayed in Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6.
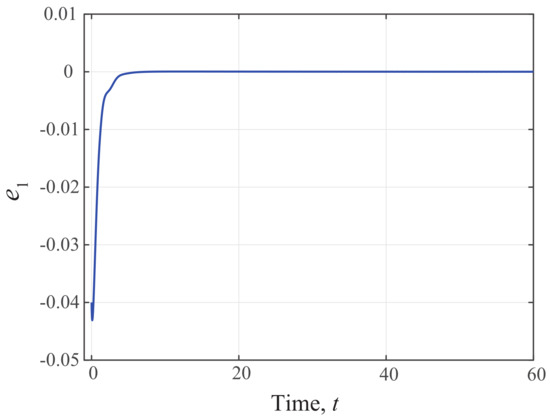
Figure 2.
Time evolution of tracking error .
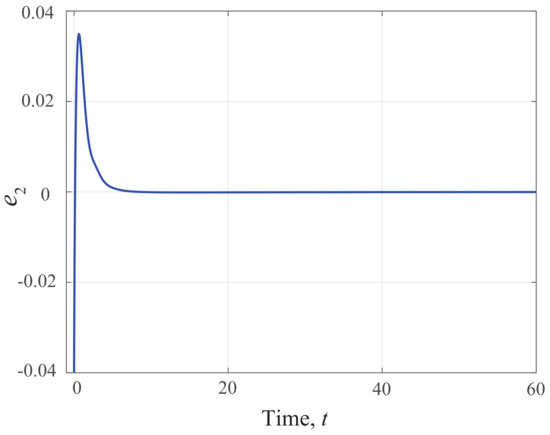
Figure 3.
Time evolution of tracking error .
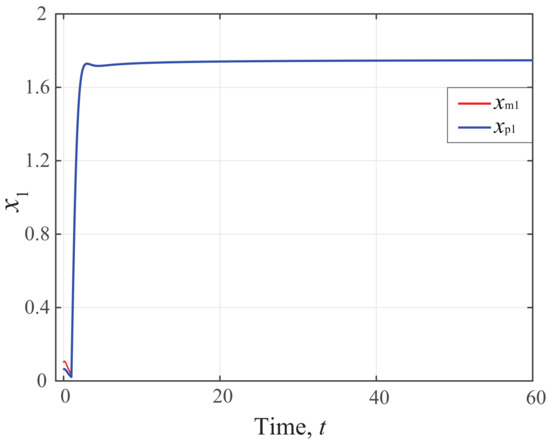
Figure 4.
Plant and model reference outputs and .
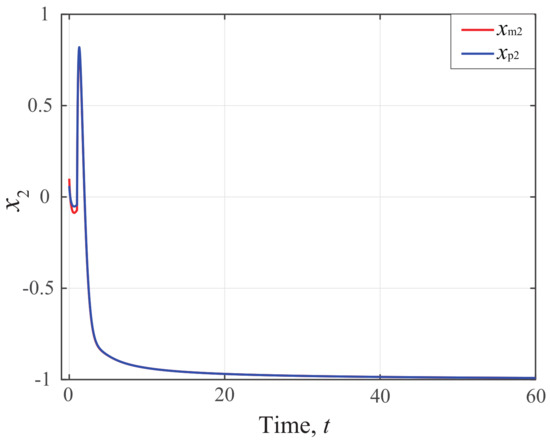
Figure 5.
Plant and model reference outputs and .
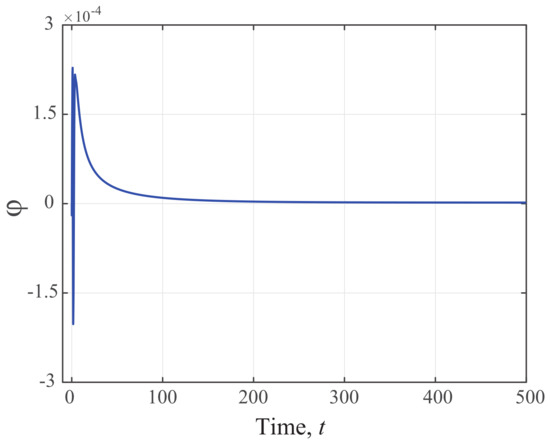
Figure 6.
Scalar function .
Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6 show that, as stated by the analysis above, the tracking error, the scalar function and the system state remain bounded for every . In addition to the boundedness of the closed-loop signals, Figure 2 and Figure 3 show that the tracking error converges to zero, although only the convergence of the mean value of was analytically proven.
External Disturbance
To illustrate the robustness of the system, we consider that the system (30) is subject to a parametric variation of the state matrix in the form at t = 20 s, where and . Here, we choose , , and the simulation results are shown in Figure 7 and Figure 8. This example shows that, even in the case of an external disturbance to the system (30), the proposed FOMRAC scheme maintains its performance and the tracking of the reference model trajectory.
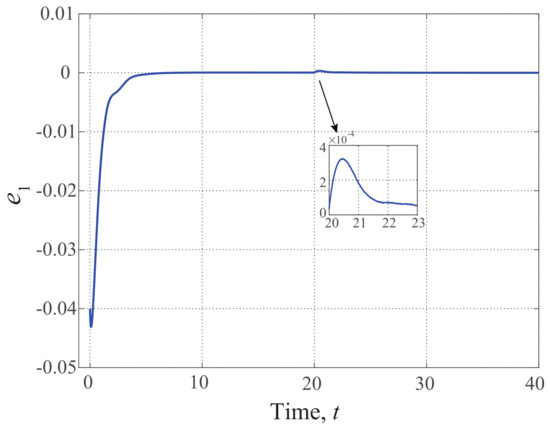
Figure 7.
System response of under the external disturbances.
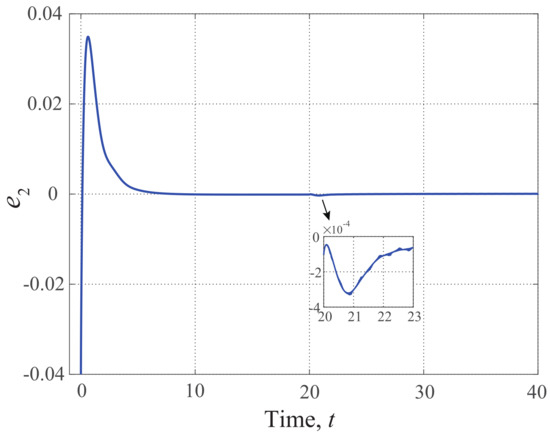
Figure 8.
System response of under the external disturbances.
Example 2.
Let us consider a fractional-order multivariable system with parameter uncertainty, where , is unknown, and is known and given by , , . For the purpose of simulation, the true . Therefore, the ideal control gain becomes and .
In the simulation, we set matrix and exist such that .
From (15), (17) and (21), we can obtain that
where , and the number of update laws in the standard fractional-order adaptive controller and the fractional adaptive controller in [24] is 2, and ours is only 1. Therefore, compared with the other two adaptive controllers, our controller can reduce the number of parameters updated online.
To further demonstrate the efficacy of the proposed adaptive control architecture, we compare the evolution of system state and system error with the standard fractional-order adaptive controller in [23], the fractional adaptive controller in [24] and our proposed adaptive controller. The initial values correspond to , , the fractional order used is , and the reference signal . For convenience, we choose for the fractional adaptive controller in [24], and for our proposed adaptive controller. Then, we have the following numerical results shown in Figure 9, Figure 10, Figure 11 and Figure 12.
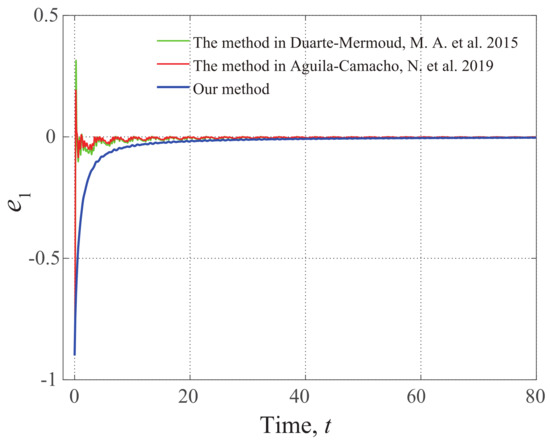
Figure 9.
Time evolution of tracking error with the standard fractional order adaptive controller in Duarte-Mermoud, M. A. et al. [23], the fractional adaptive controller in Aguila-Camacho, N. et al. [24], and our proposed adaptive controller with the fractional-order scalar update law in this paper.
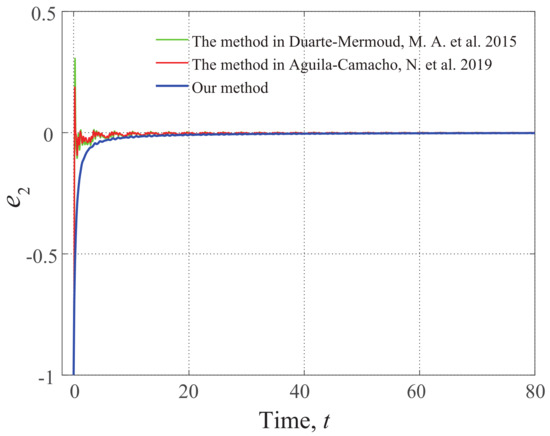
Figure 10.
Time evolution of tracking error with the standard fractional order adaptive controller in Duarte-Mermoud, M. A. et al. [23], the fractional adaptive controller in Aguila-Camacho, N. et al. [24], and our proposed adaptive controller with the fractional-order scalar update law in this paper.
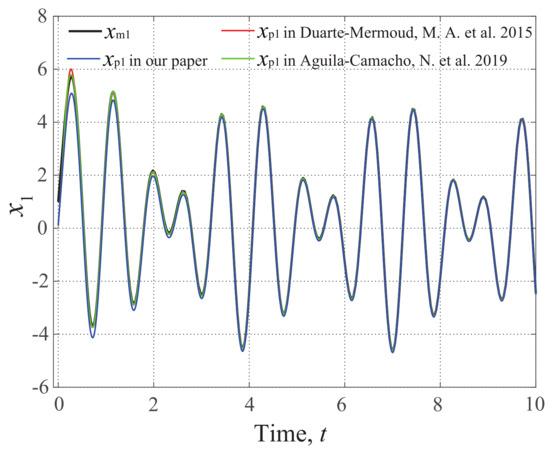
Figure 11.
Plant and model reference outputs and with the standard fractional order adaptive controller in Duarte-Mermoud, M. A. et al. [23], the fractional adaptive controller in Aguila-Camacho, N. et al. [24], and our proposed adaptive controller with the fractional-order scalar update law in this paper.
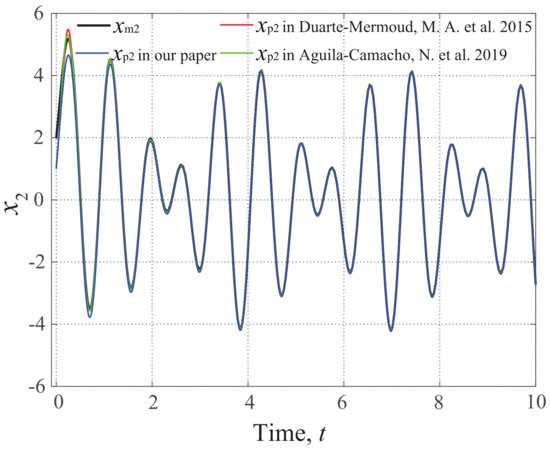
Figure 12.
Plant and model reference outputs and with the standard fractional order adaptive controller in Duarte-Mermoud, M. A. et al. [23], the fractional adaptive controller in Aguila-Camacho, N. et al. [24], and our proposed adaptive controller with the fractional-order scalar update law in this paper.
From Figure 9, Figure 10, Figure 11 and Figure 12, we can find that the standard fractional-order adaptive controller in [23], the fractional adaptive controller in [24] and our proposed adaptive controller all can make the tracking error bounded so that follows . Moreover, from Figure 9 and Figure 10, taking the error band, we can obtain that the response adjustment times of and with the standard fractional-order adaptive controller, the fractional adaptive controller in [24] and our proposed adaptive controller are 3.1033 s, 2.9814 s, 7.5304 s, and 1.5791 s, 1.029 s, 3.5002 s, respectively. Moreover, the ratio of overshoot of and is ::0, and ::0, respectively. Therefore, compared with the other two fractional-order adaptive controllers, the response adjustment time of our controller is relatively longer, but the overshoot is smaller.
Based on the above analysis, our control architecture can reduce the online computation burden while maintaining the stability of the tracking error.
6. Conclusions and Discussion
For fractional-order multivariable systems with parameter uncertainty, as the input–output dimension of the FOMRAC system increases, the number of parameters that need to be updated online in the controller also increases, which will increase the computational cost and resource consumption for increasingly complex systems. Motivated by this, a FOMRAC scheme based on the nonlinear scalar update law has been designed in this paper to relieve the computational burden existing in fractional-order controllers and ensure that the desired tracking performance can be achieved. Specifically, the scalar update law does not change as the input–output dimension changes. Compared with the existing results, the main advantage of the proposed adaptive controller is that only one parameter online update is needed such that the control scheme is computationally inexpensive. Moreover, we prove the boundedness of all signals involved in this adaptive scheme and the convergence to zero of the mean value of the squared norm of the error. Two illustrative numerical examples are presented to confirm the efficiency of the proposed architecture. As for future perspectives, our research efforts will generalize our work to nonlinear fractional-order systems, input–output multivariable fractional-order systems and fractional-order systems with limited state information.
Author Contributions
Formal analysis, F.Y.; Investigation, T.T.; Methodology, X.H.; Writing—original draft, F.Y.; Writing—review & editing, F.Y., X.H. and T.T. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China, grant number 12171073, and the China Postdoctoral Science Foundation, grant number 2021M700703, Natural Science Foundation of Sichuan Province grant number 2022NSFSC0868, and Natural Science Foundation of Sichuan Province grant number 2022NSFSC0962.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; Prentice-Hall: Hoboken, NJ, USA, 1996. [Google Scholar]
- Nguyen, N.T. Model Reference Adaptive Control: A Primer; Springer: Belmont, CA, USA, 2018. [Google Scholar]
- Kahouli, O.; Jmal, A.; Naifar, O.; Nagy, A.M.; Ben Makhlouf, A. New Result for the Analysis of Katugampola Fractional-Order Systems-Application to Identification Problems. Mathematics 2022, 10, 1814. [Google Scholar] [CrossRef]
- Rapaic, M.R.; Pisano, A. Variable-order fractional operators for adaptive order and parameter estimation. IEEE Trans. Autom. Control 2014, 59, 798–803. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Feckan, M.; Danca, M.-F. Stability, Periodicity, and Related Problems in Fractional-Order Systems. Mathematics 2022, 10, 2040. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A. Fractional adaptive control for an automatic voltage regulator. ISA Trans. 2013, 52, 807–815. [Google Scholar] [CrossRef]
- Koszewnik, A.; Pawuszewicz, E.; Ostaszewski, M. Experimental Studies of the Fractional PID and TID Controllers for Industrial Process. Int. J. Control Autom. Syst. 2021, 19, 1847–1862. [Google Scholar] [CrossRef]
- Shakibjoo, A.D.; Moradzadeh, M.; Moussavi, S.Z.; Mohammadzadeh, A.; Vandevelde, L. Load frequency control for multi-area power systems: A new type-2 fuzzy approach based on Levenberg-Marquardt algorithm. ISA Trans. 2022, 121, 40–52. [Google Scholar] [CrossRef]
- Angel, L.; Viola, J. Fractional order PID for tracking control of a parallel robotic manipulator type delta. ISA Trans. 2018, 79, 172–188. [Google Scholar] [CrossRef]
- Djebbri, S.; Ladaci, S.; Metatla, A.; Balaska, H. Fractional-order model reference adaptive control of a multi-source renewable energy system with coupled DC/DC converters power compensation. Energy Syst. 2020, 11, 315–355. [Google Scholar] [CrossRef]
- Abuaisha, T.; Kertzscher, J. Fractional-order modelling and parameter identification of electrical coils. Fract. Calc. Appl. Anal. 2019, 22, 193–206. [Google Scholar] [CrossRef]
- Nikan, O.; Avazzadeh, Z.; Tenreiro Machado, J.A. Numerical approach for modeling fractional heat conduction in porous medium with the generalized Cattaneo model. Appl. Math. Model. 2021, 100, 107–124. [Google Scholar] [CrossRef]
- Nikan, O.; Avazzadeh, Z. Numerical simulation of fractional evolution model arising in viscoelastic mechanics. Appl. Numer. Math. 2021, 169, 303–320. [Google Scholar] [CrossRef]
- Nikan, O.; Molavi-Arabshai, S.M.; Jafari, H. Numerical simulation of the nonlinear fractional regularized long-wave model arising in ion acoustic plasma waves. Discret. Contin. Dyn. Syst. Ser. S 2018, 14, 3685. [Google Scholar] [CrossRef]
- Prasad, R.; Kumar, K.; Dohar, R. Caputo fractional order derivative model of Zika virus transmission dynamics. J. Math. Comput. Sci. 2023, 28, 145–157. [Google Scholar] [CrossRef]
- Akram, T.; Abbas, M.; Ali, A. A numerical study on time fractional Fisher equation using an extended cubic B-spline approximation. J. Math. Comput. Sci. 2021, 22, 85–96. [Google Scholar] [CrossRef]
- Nikan, O.; Avazzadeh, Z.; Tenreiro Machado, J.A. A local stabilized approach for approximating the modified time-fractional diffusion problem arising in heat and mass transfer. J. Adv. Res. 2021, 32, 45–60. [Google Scholar] [CrossRef]
- Shi, B.; Yuan, J.; Dong, C. On fractional model reference adaptive control. Sci. World J. 2014, 2014, 521625. [Google Scholar] [CrossRef]
- Cheng, S.S.; Wei, Y.H.; Chen, Y.Q.; Wang, Y.; Liang, Q. Fractional order multivariable composite model reference adaptive control. Int. J. Adapt. Control Signal Process. 2017, 31, 1467–1480. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A. Boundedness of the solutions for certain classes of fractional differential equations with application to adaptive systems. ISA Trans. 2016, 60, 82–88. [Google Scholar] [CrossRef]
- Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Gallegos, J.A.; Castro-Linares, R. Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 650–659. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Gallegos, J.A.; Duarte-Mermoud, M.A. Analysis of fractional order error models in adaptive systems: Mixed order cases. Fract. Calc. Appl. Anal. 2019, 22, 1113–1132. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice-Hall: Hoboken, NJ, USA, 1996. [Google Scholar]
- Haddad, W.M.; Chellaboina, V.S. Nonlinear Dynamical Systems and Control—A Lyapunov-Based Approach; Princeton University Press: Princeton, NJ, USA, 2011. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).