
Adaptive State-Feedback Stabilization for Stochastic Nonlinear Systems with Time-Varying Powers and Unknown Covariance

Abstract
:1. Introduction
2. Problem Formulation
3. Controller Design
3.1. Controller Design
3.2. Stability Analysis
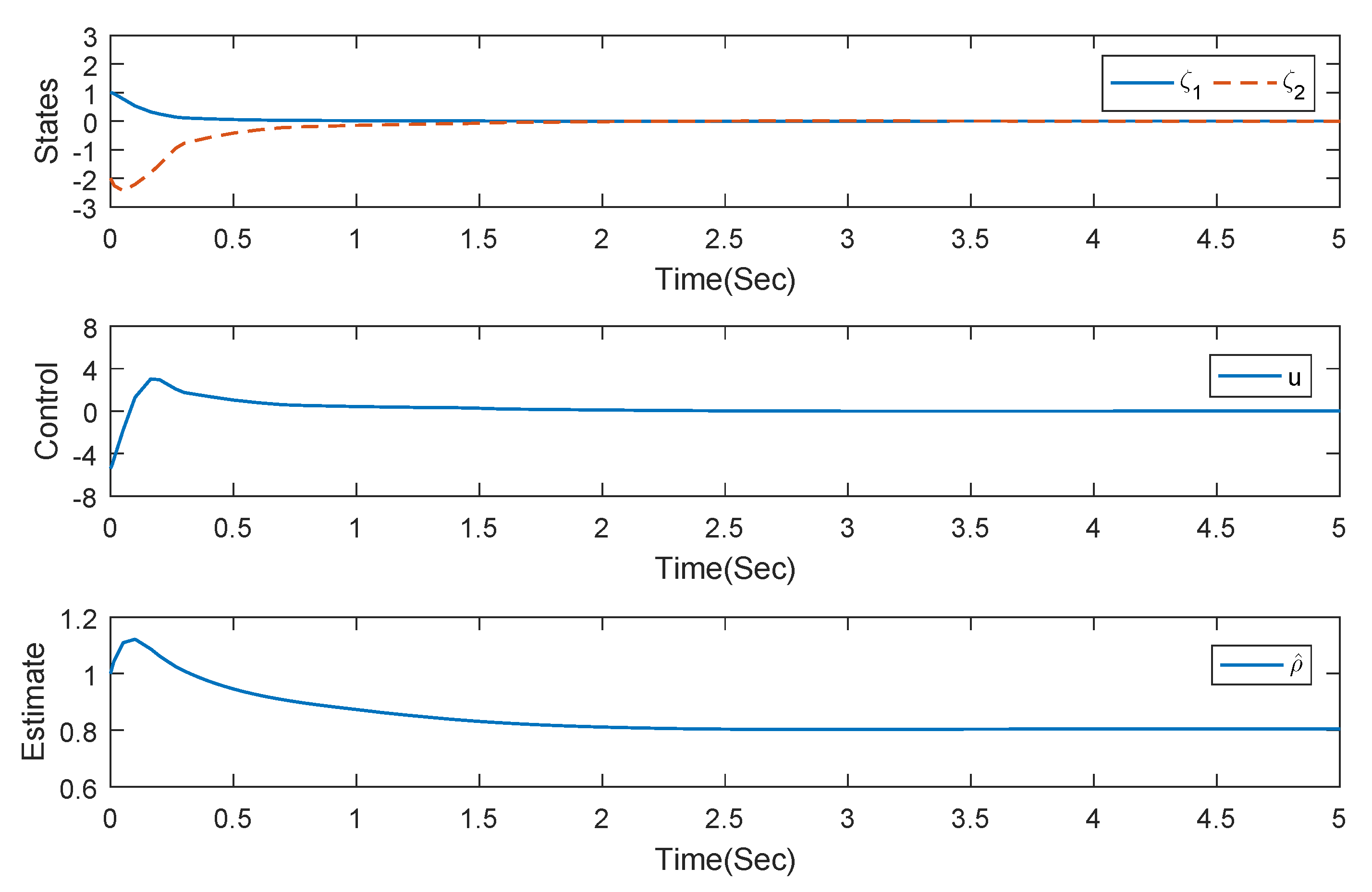
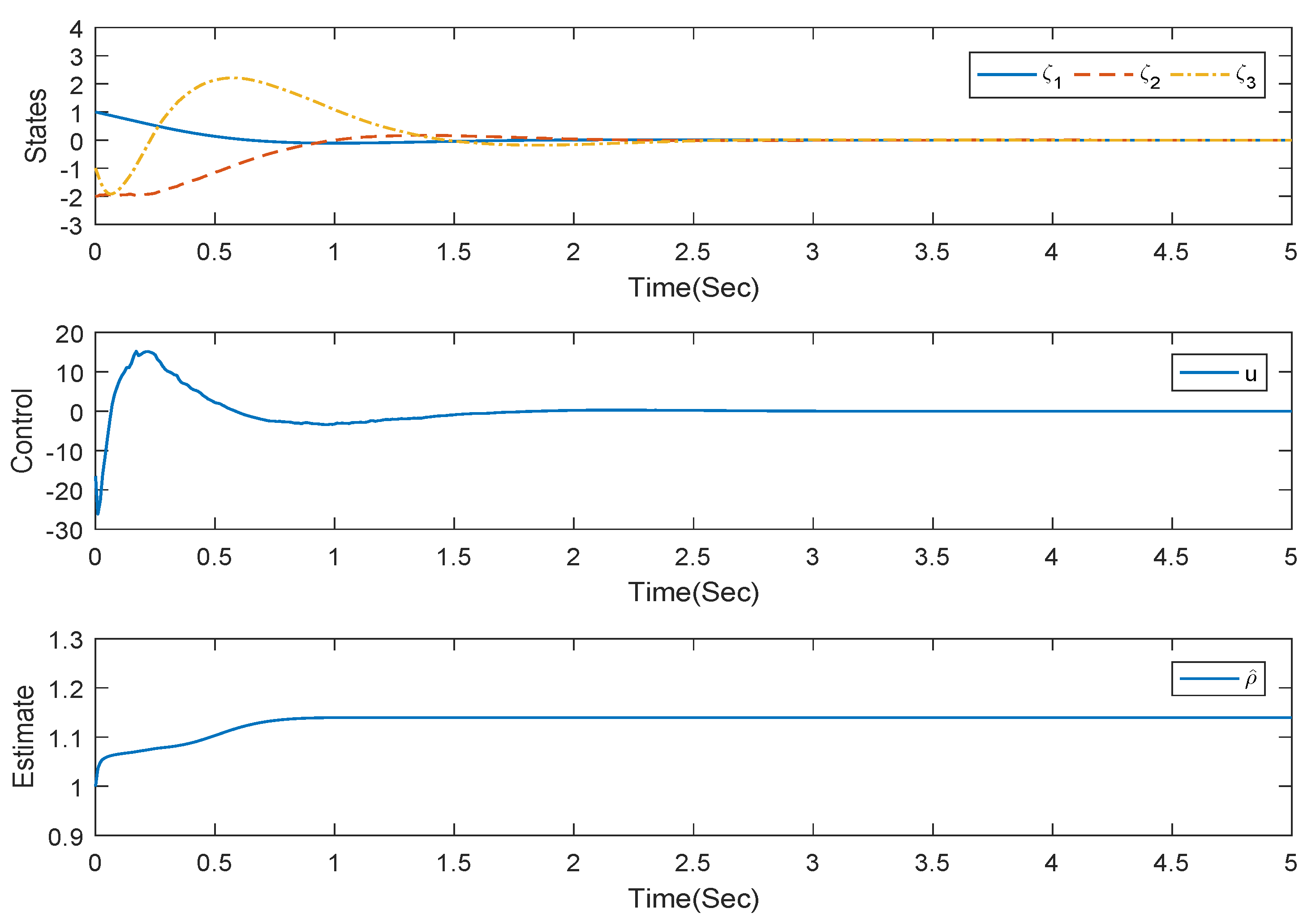
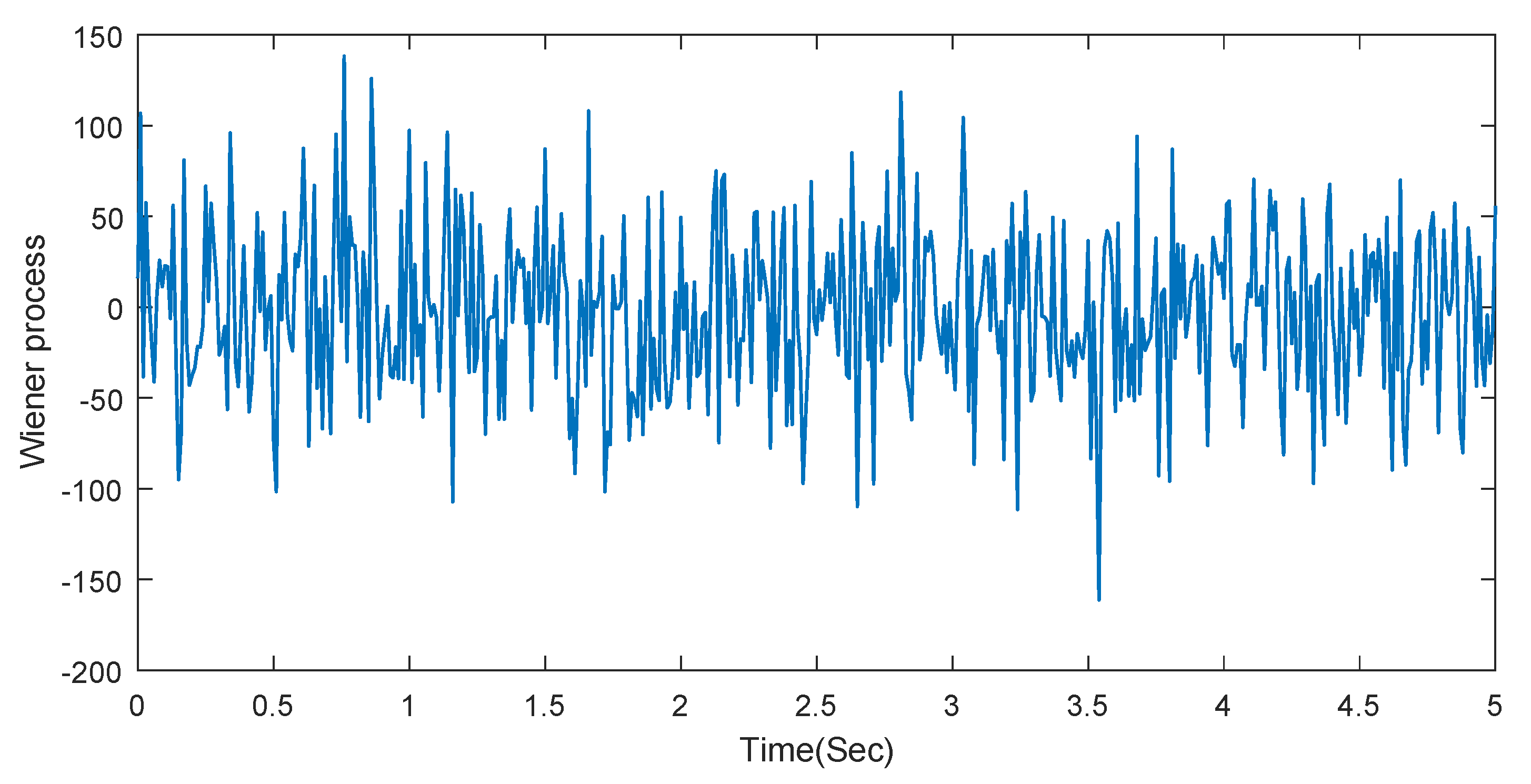
4. Two Simulation Examples
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mao, X.R. Stochastic Differential Equations and Applications; Horwood: London, UK, 1997; Available online: https://pureportal.strath.ac.uk/en/publications/stochastic-differential-equations-and-applications (accessed on 16 June 2022).
- Protter, P. Stochastic Integration and Differential Equations; Springer: New York, NY, USA, 2013; Available online: https://xueshu.dailyheadlines.cc/books?hl=zh-CN&lr=&id=2a37CAAAQBAJ&oi=fnd&pg=PA1&ots=nf9izKvtkd&sig=JD6GhA4rj4bgCZtmLep1PacmbYY (accessed on 16 June 2022).
- Deng, H.; Krstic, M. Stochastic nonlinear stabilization, part I: A backstepping design. Syst. Control Lett. 1997, 32, 143–150. [Google Scholar] [CrossRef]
- Krstic, M.; Deng, H. Stabilization of Uncertain Nonlinear Systems; Springer: New York, NY, USA, 1998; Available online: https://book.douban.com/subject/2863479/ (accessed on 16 June 2022).
- Pan, Z.G.; Basar, T. Adaptive controller design for tracking and disturbance attenuation in parametric strict-feedback nonlinear systems. IEEE Trans. Autom. Control 1998, 43, 1066–1083. [Google Scholar] [CrossRef]
- Pan, Z.G.; Basar, T. Backstepping controller design for nonlinear stochastic systems under a risk-sensitive cost criterion. SIAM J. Control Optim. 1999, 37, 957–995. [Google Scholar] [CrossRef]
- Deng, H.; Krstic, M. Output-feedback stochastic nonlinear stabilization. IEEE Trans. Autom. Control 1999, 44, 328–333. [Google Scholar] [CrossRef]
- Wu, Z.J.; Xie, X.J.; Shi, P.; Xia, Y.Q. Backstepping controller design for a class of stochastic nonlinear systems with Markovian switching. Automatica 2009, 45, 997–1004. [Google Scholar] [CrossRef]
- Liu, L.; Xie, X.J. Output-feedback stabilization for stochastic high-order nonlinear systems with time-varying delay. Automatica 2011, 47, 2772–2779. [Google Scholar] [CrossRef]
- Cui, M.Y.; Xie, X.J.; Wu, Z.J. Dynamics modeling and tracking control of robot manipulators in random vibration environment. IEEE Trans. Autom. Control 2012, 58, 1540–1545. [Google Scholar] [CrossRef]
- Li, W.Q.; Yao, X.X.; Krstic, M. Adaptive-gain observer-based stabilization of stochastic strict-feedback systems with sensor uncertainty. Automatica 2020, 120, 109112. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Mean-nonovershooting control of stochastic nonlinear systems. IEEE Trans. Autom. Control 2021, 66, 5756–5771. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Stochastic nonlinear prescribed-time stabilization and inverse optimality. IEEE Trans. Autom. Control 2022, 67, 1179–1193. [Google Scholar] [CrossRef]
- Xie, X.J.; Tian, J. State-feedback stabilization for high-order stochastic nonlinear systems with stochastic inverse dynamics. Int. J. Robust Nonlinear 2007, 17, 1343–1362. [Google Scholar] [CrossRef]
- Li, W.Q.; Xie, X.J.; Zhang, S.Y. Output-feedback stabilization of stochastic high-order nonlinear systems under weaker conditions. SIAM J. Control Optim. 2011, 49, 1262–1282. [Google Scholar] [CrossRef]
- Li, W.Q.; Liu, L.; Feng, G. Output tracking of stochastic nonlinear systems with unstable linearization. Int. J. Robust Nonlinear 2018, 28, 466–477. [Google Scholar] [CrossRef]
- Jiang, M.M.; Xie, X.J.; Zhang, K.M. Finite-time stabilization of stochastic high-order nonlinear systems with FT-SISS inverse dynamics. IEEE Trans. Autom. Control 2018, 64, 313–320. [Google Scholar] [CrossRef]
- Li, W.Q.; Liu, L.; Feng, G. Cooperative control of multiple nonlinear benchmark systems perturbed by second-order moment processes. IEEE Trans. Cybern. 2020, 50, 902–910. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.F.; Shirkhani, M.; Tavoosi, J.; Mahmoud, O. A new intelligent dynamic control method for a class of stochastic nonlinear systems. Mathematics 2022, 10, 1406. [Google Scholar] [CrossRef]
- Li, W.Q.; Liu, Y.; Yao, X.X. State-feedback stabilization and inverse optimal control for stochastic high-order nonlinear systems with time-varying powers. Asian J. Control 2021, 23, 739–750. [Google Scholar] [CrossRef]
- Li, H.J.; Li, W.Q.; Gu, J.Z. Decentralized stabilization of large-scale stochastic nonlinear systems with time-varying powers. Appl. Math. Comput. 2022, 418, 126787. [Google Scholar] [CrossRef]
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; PTR Prentice-Hall: Hoboken, NJ, USA, 1996; Available online: https://www.researchgate.net/publication/200031814_Robust_Adaptive_Control?ev=pub_cit (accessed on 16 June 2022).
- Astrom, K.J.; Wittenmark, B. Adaptive Control, 2nd ed.; Addison-Wesley: New York, NY, USA, 2008; Available online: https://xueshu.dailyheadlines.cc/books?hl=zh-CN&lr=&id=4CLCAgAAQBAJ&oi=fnd&pg=PP1&dq=+Adaptive+control&ots=zHqTooZjO9&sig=0R3IuUg9pgP5K3e0Jez6OS1AhSk (accessed on 16 June 2022).
- Deng, H.; Krstic, M.; Williams, R. Stabilization of stochastic nonlinear systems driven by noise of unknown covariance. IEEE Trans. Autom. Control 2001, 46, 1237–1253. [Google Scholar] [CrossRef]
- Deng, H.; Krstic, M. Output-feedback stabilization of stochastic nonlinear systems driven by noise of unknown covariance. Syst. Control Lett. 2000, 39, 173–182. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Stochastic adaptive nonlinear control with filterless least-squares. IEEE Trans. Autom. Control 2021, 66, 3893–3905. [Google Scholar] [CrossRef]
- Liu, J.Z.; Yan, S.; Zeng, D.L.; Hu, Y.; Lv, Y. A dynamic model used for controller design of a coal fired once-through boiler-turbine unit. Energy 2015, 93, 2069–2078. [Google Scholar] [CrossRef]
- Rui, C.; Reyhanoglu, M.; Kolmanovsky, I.; Cho, S.; McClamroch, N.H. Nonsmooth stabilization of an underactuated unstable two degrees of freedom mechanical system. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 12 December 1997; Volume 4, pp. 3998–4003. [Google Scholar] [CrossRef]
- Chen, C.C.; Qian, C.; Lin, X.; Liang, Y.W. Smooth output feedback stabilization for nonlinear systems with time-varying powers. Int. J. Robust Nonlinear 2017, 27, 5113–5128. [Google Scholar] [CrossRef]
- Lin, W.; Qian, C.J. Adding one power integrator: A tool for global stabilization of high-order lower-triangular systems. Syst. Control Lett. 2000, 39, 339–351. [Google Scholar] [CrossRef]
- Zhai, J.; Karimi, H.R. Global output feedback control for a class of nonlinear systems with unknown homogenous growth condition. Int. J. Robust Nonlinear 2019, 29, 2082–2095. [Google Scholar] [CrossRef]
- Li, W.Q.; Jing, Y.W.; Zhang, S.Y. Adaptive state-feedback stabilization for a large class of high-order stochastic nonlinear systems. Automatica 2011, 47, 819–828. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Prescribed-time control of stochastic nonlinear systems with reduced control effort. J. Syst. Sci. Complex. 2021, 34, 1782–1800. [Google Scholar] [CrossRef]
- Schioler, H.; Simonsen, M.; Leth, J. Stochastic stability of systems with semi-Markovian switching. Automatica 2014, 50, 2961–2964. [Google Scholar] [CrossRef]
- Dani, A.P.; Chung, S.J.; Hutchinson, S. Observer design for stochastic nonlinear systems via contraction-based incremental stability. IEEE Trans. Autom. Control 2014, 60, 700–714. [Google Scholar] [CrossRef]
- Niu, B.; Liu, M.; Li, A. Global adaptive stabilization of stochastic high-order switched nonlinear non-lower triangular systems. Syst. Control Lett. 2020, 136, 104596. [Google Scholar] [CrossRef]
- Li, W.Q.; Liu, L.; Feng, G. Distributed output-feedback tracking of multiple nonlinear systems with unmeasurable states. IEEE Trans. Syst. Man Cybern. 2021, 51, 477–486. [Google Scholar] [CrossRef]
- Zhu, C.L.; He, L.; Zhang, K.J.; Sun, W.; He, Z.X. Optimal timing fault tolerant control for switched stochastic systems with switched drift fault. Mathematics 2022, 10, 1880. [Google Scholar] [CrossRef]
- Li, W.Q.; Krstic, M. Prescribed-time output-feedback control of stochastic nonlinear systems. IEEE Trans. Autom. Control 2022. [Google Scholar] [CrossRef]
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, J.; Wang, H.; Li, W.; Niu, B. Adaptive State-Feedback Stabilization for Stochastic Nonlinear Systems with Time-Varying Powers and Unknown Covariance. Mathematics 2022, 10, 2873. https://doi.org/10.3390/math10162873
Gu J, Wang H, Li W, Niu B. Adaptive State-Feedback Stabilization for Stochastic Nonlinear Systems with Time-Varying Powers and Unknown Covariance. Mathematics. 2022; 10(16):2873. https://doi.org/10.3390/math10162873
Chicago/Turabian StyleGu, Jiabao, Hui Wang, Wuquan Li, and Ben Niu. 2022. "Adaptive State-Feedback Stabilization for Stochastic Nonlinear Systems with Time-Varying Powers and Unknown Covariance" Mathematics 10, no. 16: 2873. https://doi.org/10.3390/math10162873
APA StyleGu, J., Wang, H., Li, W., & Niu, B. (2022). Adaptive State-Feedback Stabilization for Stochastic Nonlinear Systems with Time-Varying Powers and Unknown Covariance. Mathematics, 10(16), 2873. https://doi.org/10.3390/math10162873