Abstract
In this paper, we obtain characterizations of solution sets of the interval-valued mathematical programming problems with switching constraints. Stationary conditions which are weaker than the standard Karush–Kuhn–Tucker conditions need to be discussed in order to find the necessary optimality conditions. We introduce corresponding weak, Mordukhovich, and strong stationary conditions for the corresponding interval-valued mathematical programming problems with switching constraints (IVPSC) and interval-valued tightened nonlinear problems (IVTNP), because the W-stationary condition of IVPSC is equivalent to Karush–Kuhn–Tucker conditions of the IVTNP. Furthermore, we use strong stationary conditions to characterize the several solutions sets for IVTNP, in which the last ones are particular solutions sets for IVPSC at the same time, because the feasible set of tightened nonlinear problems (IVTNP) is a subset of the feasible set of the mathematical programs with switching constraints (IVPSC).
Keywords:
nonlinear programming; switching constraints; stationary conditions; interval-valued optimization MSC:
90C30; 90C33; 49K10
1. Introduction
Mathematical programming problems with equilibrium constraints (MPEC) [1] and mathematical programming problems with vanishing constraints (MPVC) [2] have recently found considerable attention in the area of optimal control, mathematical equilibrium, truss topology, and other research fields [3] due to a wide range of applications in real-life problems.
Singh et al. [4] established Lagrange-type duality results and saddle point optimality criteria for mathematical programs with equilibrium constraints for differentiable functions. Pandey and Mishra [5] established Wolfe and Mond–Weir-type duality results for mathematical programs with equilibrium constraints using convexificators. Pandey and Mishra [6] obtained optimality and duality results for semi-infinite mathematical programs with equilibrium constraints using convexificators. Pandey and Mishra [7] established that the Mordukhovich (M) stationary conditions [7] are strong KKT-type sufficient optimality conditions for the nonsmooth multiobjective semi-infinite mathematical programs with equilibrium constraints. Mishra et al. [8] obtained duality results for mathematical programs with vanishing constraints for differentiable functions. Mishra et al. [9] showed that Cottle, Slater, and Mangasarian–Fromovitz constraint qualifications do not hold at an efficient solution under fairly mild assumptions, whereas the Guignard constraint qualification was satisfied sometimes for mathematical programs with vanishing constraints. Mishra et al. [9] introduced suitable modifications of said constraint qualifications, established relationships, and derived the KKT-type necessary optimality conditions. Guu et al. [10] established strong KKT-type sufficient optimality conditions for nonsmooth multiobjective semi-infinite programming problems with vanishing constraints. Lai et al. [11] established Fritz–John and KKT-type stationary points conditions for nonsmooth semi-definite multiobjective mathematical programs with vanishing constraints.
Mehlitz [12] introduced the mathematical program with switching constraints (MPSC). It is not surprising that the issues involving the usual constraint qualifications for MPEC and MPVC also exist for MPSC. Mehlitz [12] showed that if an MPSC is treated as a nonlinear program, the Mangasarian–Fromovitz constraint qualifications fail at any feasible point for which there is a pair of switching functions with a value equal to zero. As a result, he introduced the concepts of weak, Mordukhovich (M-), and strong (S-) stationarity for MPSC and presented some constraint qualifications. Kanzow et al. [13] provided several relaxation methods from the numerical solutions of MPEC to MPSC. Liang and Ye [14] obtained various optimality conditions and local error bounds for MPSC. Pandey and Singh [15] studied several constraint qualifications and stationarity for multiobjective mathematical programs with switching constraints.
Uncertainty in the real world is inevitable. Therefore, imposing uncertainty in optimization problems becomes an interesting research topic. Interval-valued nonlinear programming is one such research area; see [16,17,18,19]. Lai et al. [20] established sufficient optimality conditions and duality results for semidifferentiable mathematical programming problems. Sharma et al. [21] established the Hermite–Hadamard inequalities for preinvex interval-valued functions. Su and Dinh [22] established duality results for interval-valued pseudoconvex optimization problems with equilibrium constraints with applications. Wang and Wang [23] obtained duality results for nondifferentiable semi-infinite interval-valued optimization problems with vanishing constraints.
The characterization of solution sets in mathematical programming is useful in understanding the development of solution methods for solving the problem. Mangasarian [24] introduced the concept of the characterization of solutions sets for convex programs, and Burke and Ferris [25] provided several characterizations of solution sets for nonsmooth convex programs. Jeyakumar et al. [26] provided Lagrange multiplier-based characterizations of solution sets of cone-constrained convex programs and semidefinite programs. Dinh et al. [27] studied Lagrange multiplier characterizations of solution sets of constrained pseudolinear optimization problems. Furthermore, Jeyakumar et al. [28] gave a dual characterization of the weak and proper solution sets. Jeyakumar et al. [28] discussed Lagrange multiplier characterizations of the solutions sets under regularity conditions. Lalitha and Mehta [29] derived Lagrange multiplier characterizations of solution sets for nonlinear mathematical programs with an h-convex objective and h-pseudolinear constraints. Several Lagrange multiplier characterizations of solution sets for a convex infinite programming problems are obtained in [30]. Mishra et al. [31] established several Lagrange multiplier characterizations of solution sets for constrained nonsmooth pseudolinear optimization problems. Recently, Sisarat and Wangkeeree [32] provided some characterizations of solution sets of constant pseudo Lagrangian-type functions and established Lagrange multiplier characterizations. Some recent developments of significant research on characterizations of solution sets are in [33,34,35,36,37,38,39,40,41,42,43] and references therein. Recently, Treanta [44] provided several characterizations of solution sets of interval-valued variational control problems and discussed its relationship with variational control problems.
Motivated by the above-mentioned work, firstly, we consider interval-valued mathematical programming with switching constraints (IVPSC). We introduce corresponding weak, Mordukhovich, and strong stationary conditions (W-stationary, M-stationary and S-stationary for short). We propose an interval-valued tightened nonlinear problem (IVTNP) associated with IVPSC. We provide several characterizations of solution sets for IVPSC with the help of the S-stationary condition and IVTNP. We construct the corresponding Lagrangian function for IVPSC. We use semiconvex functions introduced by Mifflin [45], extend for interval-valued nonsmooth functions and provide the properties of interval-valued semiconvex functions. Furthermore, we prove that the associated Lagrangian is constant under the S-stationary and semiconvexity conditions with a Clarke subdifferential. We also provide an example to support the theoretical findings.
2. Preliminaries
2.1. Interval Analysis
We collect some basic concepts and essential definitions related to interval-valued functions from Moore [46] and Wu [18].
We denote by the class of all closed intervals in Let where and denote the lower and upper bounds of respectively. Let and be in then, we have
- (i)
- (ii)
- (iii)
- (iv)
- where t is a real number.
Let and be two closed intervals in We write if and only if and It means that U is inferior to V, or V is superior to U. It is easy to see that “” is a partial ordering on
The function is called an interval valued function; this means is a closed interval in for each . f can be written as where and are two real valued functions defined on such that
We write if and only if and We say is an interval valued vector if each component is a closed interval for Suppose and are two interval valued vectors. We write if and only if and if and only if and for at least one
Definition 1
([17]). An interval-valued function defined on is said to be -convex if
2.2. Generalized Derivatives
We collect the definitions and properties of generalized derivatives from Clarke [47].Suppose is a locally Lipschitz function at . The generalized directional derivative of f at u in the direction is denoted by and is defined by
and the Clarke’s subdifferential of f at u, denoted by , is defined by
We denote by the usual inner product in n-dimensional real Euclidean space i.e.,
The directional derivatives of f at u in the direction of d, denoted by , are defined by
f is said to be regular at u in the Clarke sense if exists and is equal to for every [48].
Consider is an interval-valued function; then, is regular if both the upper and lower bound functions and are regular.
Suppose M is the closed convex subset of The normal cone [49] to M at u is
Definition 2
([45]). Suppose X is a nonempty subset of . A function is said to be semiconvex at if f is locally Lipschitz at u and regular at u, and it satisfies the following condition
The interval-valued function is said to be semiconvex on X if and are semiconvex at every
We can easily see from the above definition that
Mifflin [45] provided an important result on semiconvex functions, which can be further generalized for interval-valued functions.
Lemma 1.
Let the function f be semiconvex on a convex set . Then, for with we have
The interval-valued function is semiconvex; then, for with we have
This means that
2.3. Interval-Valued Mathematical Programs with Switching Constraints (IVPSC)
We consider the following interval-valued mathematical programs with switching constraints (IVPSC)
where the functions are continuously differentiable on . We say while the switching constraint since functions are active is at least one, or for all at any feasible point of IVPSC.
We denote the solution set of IVPSC by S.
2.4. Stationary Conditions
We need to mention some index sets to define stationary conditions at the feasible point for IVPSC.
We establish some stationary conditions in the Clarke subdifferential form motivated by Mehlitz [12]. In order to define the stationary conditions, we need to introduce the KKT system of IVPSC, which is as follows.
Definition 3.
(KKT-type conditions): A feasible point of IVPSC is said to satisfy KKT-type conditions if there exist multipliers such that the following conditions hold
- Weakly stationary point (W-stationary point): A feasible point of IVPSC is called W-stationary if there exist multipliers , such that the following conditions hold
- Mordukhovich stationary point (M-stationary point): A feasible point of IVPSC is called M-stationary if there exist multipliers such that the following conditions hold
- Strong stationary point (S-stationary point): A feasible point of IVPSC is called S-stationary if there exist multipliers , such that the following conditions hold
We can easily see that the following relationship holds between the above stationary conditions.
S-stationary condition ⇒ M-stationary condition ⇒ W-stationary condition.
The W-stationary condition of IVPSC at one of its feasible points is equivalent to KKT conditions of the following tightened nonlinear problem.
We consider the interval-valued tightened nonlinear problem (IVTNP) at
The feasible set of IVTNP is a subset of the feasible set of IVPSC.
3. Lagrange Multiplier Characterization
We suppose that there exist multipliers , such the the following optimality conditions hold
The addition of normal cone in the above optimality condition is motivated by Theorem 5.1.6 of [50].
The Lagrangian function is defined by
Lemma 2.
Let be the solution to the problem (IVTNP) such that the condition (3) and S-stationary condition hold. Suppose that the functions are regular at and the Lagrangian function is semiconvex at then, is constant on
Proof.
Let and there exist multipliers such that condition (3) holds. Then, there exist , such that
As M is a closed convex subset of hence, we have
Now, since is regular at we have
Since is semiconvex at we have
This means
Hence, (7) becomes
When this means and Hence,
Therefore, is constant on S. □
Theorem 1.
Let be the solution to the problem (IVTNP), such that the condition (3) and S-stationary condition hold. Suppose that the functions are semiconvex on M and the Lagrangian function is semiconvex at and suppose that the functions , are regular at . Then, where
Proof.
Clearly, we claim that and
Let us suppose that then such that
Since and are semiconvex on and
In addition, since and is a solution to (IVPSC),
Now, we claim that Suppose it follows from Lemma 2 that we have
As satisfies condition (3) with and the S-stationary condition holds at then there exists , such that
As M is a closed convex subset of therefore, for we obtain
i.e.,
Since and S-stationary holds at
Since M is a convex subset of we have provided and
Hence,
Since, are regular at i.e.,
Let such that
Now, since and and are semiconvex at
Lemma 1 implies that this means
Therefore,
Hence,
Now, we have to prove that
Since it remains to prove that
and are regular at and so we have
Now, we claim that there does not exist any such that
Suppose on contrary, there exists such that i.e.,
Then
Since we have
Thus, and small enough such that
Easily, we can see that is continuous at
Letting we have which is a contradiction, hence, if
This proves that implies We have
Hence, This completes the proof. □
Example 1.
Consider an interval-valued optimization problem (IVPSC)
where is defined by
As and are differentiable convex functions so the coresponding subgradient and gradient are the same.
and
Consider a set . f is a -convex on the set
Lagrangian
Here, the solution set is Let hold the condition (3) and is convex.
We can easily see that the condition (3) holds for the above interval-valued problem
with and for any values of and at point We can also see that the S-stationary condition holds for IVPSC.
Choosing such that
Hence,
This verifies the above result.
Figure 1 represents the lower and upper bound function and of interval-valued objective function . Figure 2 shows the constraint functions and switching constraints for Example 1.
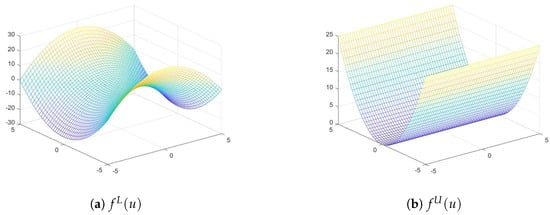
Figure 1.
The lower and upper bound objective functions.
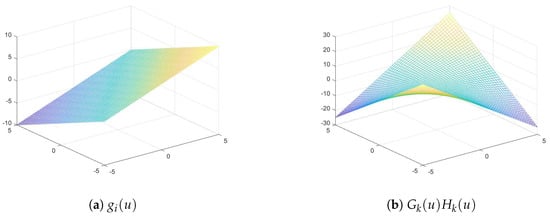
Figure 2.
Constraints and .
Corollary 1.
Let be the solution to the problem (IVTNP) such that the condition (3) and S-stationary condition hold. Suppose that the functions are semiconvex on M and if the Lagrangian function is semiconvex at then where
We know that every convex function is semiconvex [51]. In the case where are convex functions, the Clarke subdifferential coincides with the subdifferential in the convex analysis.
Corollary 2.
Let be the solution to the problem (IVTNP) such that the condition (3) and S-stationary condition hold. Suppose that the functions are convex; then, where
We can easily see that
and by Lemma 2,
Corollary 3.
Suppose that the functions and are semiconvex on then where
4. Conclusions and Future Remarks
We have considered the interval-valued mathematical programming problem with switching constraints (IVPSC) and studied the Lagrange multiplier characterizations of solution sets with the help of a semiconvex function and S-stationary condition. The S-stationary condition is stronger than the W-stationary and M-stationary conditions. We have proved that the associated Lagrangian function is constant for IVTNP withholding of the S-stationary condition. Thus, the W-stationary condition holds, too. Based on the proved by Mehlitz [12] condition, for the W-stationary condition, the feasible set of a tightened nonlinear problem (IVTNP) is a subset of the feasible set of the mathematical programs with switching constraints (IVPSC). Therefore, we have characterized the particular solutions sets for IVTNP. The IVPSC is a new class of optimization problems with significant applications. MPSC can be used for the discretized version of the optimal control problem with switching structure [12], and we can extend the results to interval-valued optimization problems from a practical point of view. The IVPSC can be reformulated as a mathematical program with disjunctive constraints (MPDC) [14]. We can introduce an alternative approach to LICQ and establish the first and second order optimality conditions for MPDC with interval-valued objective functions. To the best of our knowledge, there are a few papers related to characterizations of solution sets and interval-valued nonlinear optimization. This article can be extended for various nonlinear programming problems such as MPEC, MPVC, MPDC, and many more from the application point of view.
Author Contributions
Formal analysis, K.K.L., S.K.M., S.K.S. and M.H.; Funding acquisition, K.K.L.; Methodology, S.K.S. and M.H.; Supervision, S.K.M.; Validation, K.K.L., S.K.M., S.K.S. and M.H.; Writing—original draft, S.K.S.; Writing—review & editing, S.K.S. All authors have read and agreed to the published version of the manuscript.
Funding
The second author is financially supported by the “Research Grant for Faculty” (IoE Scheme) under Dev. Scheme No. 6031. The fourth author is financially supported by CSIR-UGC JRF, New Delhi, India, through Reference no.: 1009/(CSIR-UGC NET JUNE 2018).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No data were used to support this study.
Acknowledgments
The authors are indebted to the anonymous reviewers for their valuable comments and remarks that helped to improve the presentation and quality of the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Harker, P.T.; Pang, J.S. Existence of optimal solutions to mathematical programs with equilibrium constraints. Oper. Res. Lett. 1988, 7, 61–64. [Google Scholar] [CrossRef]
- Achtziger, W.; Kanzow, C. Mathematical programs with vanishing constraints: Optimality conditions and constraint qualifications. Math. Program. 2008, 114, 69–99. [Google Scholar] [CrossRef]
- Ben-Tal, A.; Jarre, F.; Kočvara, M.; Nemirovski, A.; Zowe, J. Optimal design of trusses under a nonconvex global buckling constraint. Optim. Eng. 2000, 1, 189–213. [Google Scholar] [CrossRef]
- Singh, Y.; Pandey, Y.; Mishra, S.K. Saddle point optimality criteria for mathematical programming problems with equilibrium constraints. Oper. Res. Lett. 2017, 45, 254–258. [Google Scholar] [CrossRef]
- Pandey, Y.; Mishra, S.K. Duality for nonsmooth optimization problems with equilibrium constraints, using convexificators. J. Optim. Theory Appl. 2016, 171, 694–707. [Google Scholar] [CrossRef]
- Pandey, Y.; Mishra, S.K. Optimality conditions and duality for semi-infinite mathematical programming problems with equilibrium constraints, using convexificators. Ann. Oper. Res. 2018, 69, 549–564. [Google Scholar] [CrossRef]
- Pandey, Y.; Mishra, S.K. On strong KKT type sufficient optimality conditions for nonsmooth multiobjective semi-infinite mathematical programming problems with equilibrium constraints. Oper. Res. Lett. 2016, 44, 148–151. [Google Scholar] [CrossRef]
- Mishra, S.K.; Singh, V.; Laha, V. On duality for mathematical programs with vanishing constraints. Ann. Oper. Res. 2016, 355, 249–272. [Google Scholar] [CrossRef]
- Mishra, S.K.; Singh, V.; Laha, V.; Mohapatra, R.N. On constraint qualifications for multiobjective optimization problems with vanishing constraints. In Optimization Methods, Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2015; pp. 95–135. [Google Scholar]
- Guu, S.M.; Singh, Y.; Mishra, S.K. On strong KKT type sufficient optimality conditions for multiobjective semi-infinite programming problems with vanishing constraints. J. Ineq. Appl. 2017, 2017, 282. [Google Scholar] [CrossRef] [Green Version]
- Lai, K.K.; Hassan, M.; Singh, S.K.; Maurya, J.K.; Mishra, S.K. Semidefinite multiobjective mathematical programming problems with vanishing constraints using convexificators. Fractal Fract. 2022, 6, 3. [Google Scholar] [CrossRef]
- Mehlitz, P. Stationarity conditions and constraint qualifications for mathematical programs with switching constraints. Math. Program. 2020, 181, 149–186. [Google Scholar] [CrossRef]
- Kanzow, C.; Mehlitz, P.; Steck, D. Relaxation schemes for mathematical programmes with switching constraints. Optim. Meth. Soft 2019, 36, 1223–1258. [Google Scholar] [CrossRef]
- Liang, Y.C.; Ye, J.J. Optimality conditions and exact penalty for mathematical programs with switching constraints. J. Optim. Theory Appl. 2021, 190, 1–31. [Google Scholar] [CrossRef]
- Pandey, Y.; Singh, V. On Constraint Qualifications for Multiobjective Optimization Problems with Switching Constraints. In Indo-French Seminar on Optimization, Variational Analysis and Applications; Springer: Singapore, 2020; pp. 283–306. [Google Scholar]
- Wu, H.C. On interval-valued nonlinear programming problems. J. Math. Anal. Appl. 2008, 338, 299–316. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.C. The Karush-Kuhn-Tucker optimality conditions in an optimization problem with interval-valued objective function. Eur. J. Oper. Res. 2007, 176, 46–59. [Google Scholar] [CrossRef]
- Wu, H.C. The Karush-Kuhn-Tucker optimality conditions in multiobjective programming problems with interval-valued objective functions. Eur. J. Oper. Res. 2009, 196, 49–60. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, Q.; Ma, X.; Li, L. Relationships between interval-valued vector optimization problems and vector variational inequalities. Fuzzy Optim. Decis. Mak. 2016, 15, 33–55. [Google Scholar] [CrossRef]
- Lai, K.K.; Shahi, A.; Mishra, S.K. On semidifferentiable interval-valued programming problems. J. Ineq. Appl. 2021, 2021, 35. [Google Scholar] [CrossRef]
- Sharma, N.; Singh, S.K.; Mishra, S.K.; Hamdi, A. Hermite-Hadamard-type inequalities for interval-valued preinvex functions via Riemann-Liouville fractional integrals. J. Ineq. Appl. 2021, 2021, 98. [Google Scholar] [CrossRef]
- Van Su, T.; Dinh, D.H. Duality results for interval-valued pseudoconvex optimization problem with equilibrium constraints with applications. Comput. Appl. Math. 2020, 39, 127. [Google Scholar] [CrossRef]
- Wang, H.; Wang, H. Duality theorems for nondifferentiable semi-infinite interval-valued optimization problems with vanishing constraints. J. Ineq. Appl. 2021, 2021, 182. [Google Scholar] [CrossRef]
- Mangasarian, O.L. A simple characterization of solution sets of convex programs. Oper. Res. Lett. 1988, 7, 21–26. [Google Scholar] [CrossRef] [Green Version]
- Burke, J.V.; Ferris, M.C. Characterization of solution sets of convex programs. Oper. Res. Lett. 1991, 10, 57–60. [Google Scholar] [CrossRef] [Green Version]
- Jeyakumar, V.; Lee, G.M.; Dinh, N. Lagrange multiplier conditions characterizing optimal solution sets of cone-constrained convex programs. J. Optim. Theory Appl. 2004, 123, 83–103. [Google Scholar] [CrossRef]
- Dinh, N.; Jeyakumar, V.; Lee, G.M. Lagrange multiplier characterizations of solution sets of constrained pseudolinear optimization problems. Optimization 2006, 55, 241–250. [Google Scholar] [CrossRef]
- Jeyakumar, V.; Lee, G.M.; Dinh, N. Characterizations of solution sets of convex vector minimization problems. Eur. J. Oper. Res. 2006, 174, 1380–1395. [Google Scholar] [CrossRef]
- Lalitha, C.S.; Mehta, M. Characterizations of solution sets of mathematical programs in terms of Lagrange multipliers. Optimization 2009, 58, 995–1007. [Google Scholar] [CrossRef]
- Son, T.Q.; Dinh, N. Characterizations of optimal solution sets of convex infinite programs. TOP 2008, 16, 147–163. [Google Scholar] [CrossRef]
- Mishra, S.K.; Upadhyay, B.B. Lagrange multiplier characterizations of solution sets of constrained nonsmooth pseudolinear optimization problems. J. Optim. Theory Appl. 2014, 160, 763–777. [Google Scholar] [CrossRef]
- Sisarat, N.; Wangkeeree, R. Characterizing the solution set of convex optimization problems without convexity of constraints. Optim. Lett. 2020, 14, 1127–1144. [Google Scholar] [CrossRef]
- Ivanov, V.I. Characterizations of solution sets of differentiable quasiconvex programming problems. J. Optim. Theory Appl. 2019, 181, 144–162. [Google Scholar] [CrossRef] [Green Version]
- Jeyakumar, V.; Lee, G.M.; Li, G. Characterizing robust solution sets of convex programs under data uncertainty. J. Optim. Theory Appl. 2015, 164, 407–435. [Google Scholar] [CrossRef]
- Kim, D.S.; Son, T.Q. Characterizations of solutions sets of a class of nonconvex semi-infinite programmin problems. J. Nonl. Convex Anal. 2011, 12, 429–440. [Google Scholar]
- Li, X.B.; Wang, S. Characterizations of robust solution set of convex programs with uncertain data. Optim. Lett. 2018, 12, 1387–1402. [Google Scholar] [CrossRef]
- Long, X.J.; Liu, J.; Huang, N.J. Characterizing the solution set for nonconvex semi-infinite programs involving tangential subdifferentials. Numer. Funct. Anal. Optim. 2021, 42, 279–297. [Google Scholar] [CrossRef]
- Sisarat, N.; Wangkeeree, R.; Lee, G.M. Some characterizations of robust solution sets for uncertain convex optimization problems with locally Lipschitz inequality constraints. J. Ind. Manag. Optim. 2020, 16, 469–493. [Google Scholar] [CrossRef] [Green Version]
- Son, T.Q.; Kim, D.S. A new approach to characterize the solution set of a pseudoconvex programming problem. J. Comput. Appl. Math. 2014, 261, 333–340. [Google Scholar] [CrossRef]
- Sun, X.K.; Teo, K.L.; Long, X.J. Characterizations of robust ϵ-quasi optimal solutions for nonsmooth optimization problems with uncertain data. Optimization 2021, 70, 847–870. [Google Scholar] [CrossRef]
- Sun, X.; Teo, K.L.; Tang, L. Dual approaches to characterize robust optimal solution sets for a class of uncertain optimization problems. J. Optim. Theory Appl. 2019, 182, 984–1000. [Google Scholar] [CrossRef]
- Yang, X.M. On characterizing the solutions of pseudoinvex extremum problems. J. Optim. Theory Appl. 2009, 140, 537–542. [Google Scholar] [CrossRef]
- Zhao, K.Q.; Yang, X.M. Characterizations of the solution set for a class of nonsmooth optimization problems. Optim. Lett. 2013, 7, 685–694. [Google Scholar] [CrossRef]
- Treanta, S. Characterization results of solutions in interval-valued optimization problems with mixed constraints. J. Glob. Optim. 2021, 951–964. [Google Scholar] [CrossRef]
- Mifflin, R. Semismooth and semiconvex functions in constrained optimization. SIAM J. Control Optim. 1977, 15, 959–972. [Google Scholar] [CrossRef] [Green Version]
- Moore, R.E. Methods and Applications of Interval Analysis; SIAM: Philadelphia, PA, USA, 1979. [Google Scholar]
- Clarke, F.H. Optimization and Nonsmooth Analysis; Willey-Interscience: New York, NY, USA, 1983. [Google Scholar]
- Clarke, F.H.; Yu S Ledyaev, J.S.S.; Wolenski, P.R. Nonsmooth Analysis and Control Theory; Springer: Berlin, Germany, 1998. [Google Scholar]
- Rockafellar, R.T. Convex Analysis; Princeton University Press: Princeton, NJ, USA, 1970. [Google Scholar]
- Makela, M.M.; Neittaanmaki, P. Nonsmooth Optimization: Analysis and Algorithms with Applications to Optimal Control; World Scientific Publishing: Singapore, 1992. [Google Scholar]
- Loridan, P. Necessary Conditions for ϵ-Optimality. In Optimality and Stability in Mathematical Programming; Springer: Berlin/Heidelberg, Germany, 1982; pp. 140–152. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).