Abstract
This paper is concerned with the existence of mild solutions and total controllability for a class of non-autonomous measure evolution systems with non-instantaneous impulses and state-dependent delay. By using the theory of evolution family and Krasnoselskii’s fixed point theorem, the existence of mild solutions and total controllability for the considered systems is obtained. Finally, we give two applications to support the validity of the study.
Keywords:
controllability; non-autonomous; non-instantaneous impulses; state-dependent delay; fixed point theory MSC:
34K37; 34A06; 34B1
1. Introduction
Many physical processes such as harvesting, natural disasters, shocks, etc., cause abrupt changes in their states at a certain moment. These sudden changes occur in a very short time and can be neglected compared to the whole duration of the process. They are estimated in the form of instantaneous impulses. In other words, if a finite number of disturbances occur at a fixed time during a continuous evolutionary process, it is modeled as impulsive differential equations (IDEs, for short). IDEs have widespread applications in several areas of science and engineering, for example, population dynamics, ecology, and network control systems with scheduling protocols (see [1,2,3,4,5] and references therein).
However, some dynamics of the evolution processes in pharmacotherapy cannot be modeled by instantaneous impulsive dynamical systems, for example, in the hemodynamical equilibrium of a person, the introduction of insulin into the bloodstream and the consequent absorption of the body are gradual processes and stay active for a finite time period. Therefore, Hernández and O’Regan [6] introduced a new class of impulses termed non-instantaneous impulses, which start at an arbitrary fixed point and stay active for a finite time interval. Later, Wang and Fěckan [7] extended this model to instantaneous and non-instantaneous IDEs, which are very important in the study of dynamics of evolutionary processes. Borah and Bora [8] studied the existence of mild solutions for semilinear evolution equations with non-instantaneous impulses by using fixed point theorem. For detailed results on the theory of non-instantaneous IDEs, see [7,8,9,10,11] and references therein.
On the other hand, a complex situation with infinitely many perturbation points in a finite time interval, known as the Zeno behavior [12], cannot be modeled by IDEs. Therefore, measure differential equations (MDEs) play a key role in dealing with this phenomenon. In the beginning, MDEs were established by Sharma et al. [13] and Pandit et al. [14]. Thenceforth, Satco [15] obtained the existence of regulated solutions of MDEs by applying fixed point theorem. Using Mönch fixed point theorem and measure of noncompactness, the existence results for the semilinear MDEs are investigated in [16].
As we know, controllability is an important concept in modern mathematical control theory, which has already gained considerable attention from many scholars [1,2,9,10,17,18]. For instance, Chalishajar and Kumar [9] studied the controllability of the second order semilinear differential equation with infinite delay and non-instantaneous impulses. A frequently used method for solving the controllability problem is to transform it into a fixed point problem for an appropriate operator in a function space. Existence and control problems for various types of measure differential systems have been studied by many authors in [19,20,21,22,23,24,25]. For example, Wan and Sun [24] investigated the approximate controllability for a class of abstract MDEs by applying -set contractive fixed point theorem. In [23], Kumar and Abdal discussed the controllability for a class of MDEs with nonlocal conditions by using Mönch fixed point theorem.
More generally, Cao and Sun [20] proved the exact controllability for following the semilinear MDEs in Banach spaces
By using semigroup theory and Mönch fixed point theorem, sufficient conditions for exact controllability of MDEs are established.
Wang et al. [11] investigated the exact controllability for the following fractional evolution system with non-instantaneous impulses
where is a given multifunction, the fixed points and satisfy and are the right and left limits of v at the point respectively, and is a fixed point.
However, Wang et al. obtained exact controllability by only applying control in the last subinterval of time, not on each point of impulses. However, in many engineering applications, we also need to control the system within each impulse interval. Therefore, in this manuscript, the control is applied for each subinterval of time. So, we establish the so-called total controllability result of the evolution system. Moreover, there are various real-world phenomena, such as heat conduction in materials with decaying memory, inferred grinding models and neural networks, etc, that depend on the past states of the system and are described by the state-dependent delay evolution systems. Many authors have contributed to the solvability and controllability of such systems with state-dependent delay, see [2,9,10,17,18,23,26] and the references therein.
Motivated by the above-mentioned discussions, we consider the total controllability for the following non-autonomous measure evolution systems with non-instantaneous impulses and state-dependent delay
where , , , and for each , . is a phase space, which will be specialized later in Section 2. is a family of linear operators (not necessarily bounded) on X, where X is a Banach space. . The function is an element of and defined by . The function is continuous. Moreover the function is continuous. The control function takes values in , where U is also a Banach space. will be introduced in Section 2. B is a bounded linear operator from U into X. is non-instantaneous impulsive function for all . is a left continuous non-decreasing function on X. and denote the distributional derivatives of the solution and the function g, respectively.
The main contribution, importance, and novelty of this article are given below:
- The existence of a mild solution to the system (1), by applying an integral equation which is given in terms of semigroup, is established for the first time. Then, by using the theory of evolution family and Krasnoselskii’s fixed point theorem, we obtain some sufficient conditions to ensure the controllability of system (1).
- It should be pointed out that our system covers complex situations. If the function g is the sum of a step and an absolutely continuous function, the system exhibits both instantaneous and non-instantaneous impulses. Few papers have investigated such systems, so this is a new challenge for the scientific field to solve such problems separately.
- Moreover, we establish the total controllability result, where the control system (1) achieves the desired state at the last point and at each impulse point .
- The significance to study the MDEs is that one can model Zeno trajectories because g as a function of bounded variation may exhibit infinitely many discontinuity points in a finite interval. Such systems arise in game theory, non-smooth mechanics, and other systems [12,27].
- As the authors of [10,22] said, the main difficulty to deal with the MDEs is that they are not as smooth or continuous as ordinary differential equations. This fact means that further study for MEDs is more difficult, mainly because they are only right continuous and bounded.
- The results of our derivation involve state-dependent delay and non-instantaneous impulses; therefore, they generalize the existing results of Cao [20] and Sun.
- Finally, we give two applications to support the validity of the study.
This paper is organized as follows. In Section 2, we first give some fundamental concepts and results, which will be used throughout this paper. Next, by using Krasnoselskii’s fixed point theorem, we obtain the controllability results for system (1) in Section 3. Finally, in Section 4, an illustrative example is worked out to support the main results.
2. Preliminaries
In this section, we list some necessary definitions and lemmas, which will be used throughout the present paper.
Definition 1
([15]). A function is called regulated on , if the limits
exist and are finite for .
The space of regulated functions is denoted by . It is well known that the set of discontinuities of a regulated function is at most countable and that the space is a Banach space endowed with the norm .
Lemma 1
([19]). Consider the functions and such that g is regulated and exists. Then for every , the function
is regulated.
Definition 2
([19]). A set is called equiregulated if, for every and every , there is such that
(i) if , and , then
(ii) if , and , then
Lemma 2
([19]). Let X be a Banach space. Assume that is equiregulated, and for every , the set is relatively compact in X. Then the set is relatively compact in .
Definition 3
([15]). A function is called Henstock–Lebesgue–Stieltjes integrable on if there is a function denoted by such that for every , there exists a gauge δ on with
for every δ-fine partition of .
Let be a space of all p-ordered Henstock–Lebesgue–Stieltjes integral regulated functions from J to X with respect to g. The norm is defined by
The control function , where U is a separable reflexive Banach space. The space of all bounded linear operators from U to X is denoted by equipped with the norm . The notation , represents the space of all bounded linear operators on X equipped with the norm .
Let be a continuous function with . For any , we define such that is bounded and measurable} and equip the space with the norm
Let us define such that for any with and . If is endowed with the norm
then is a Banach space.
Next, we employ an axiomatic definition of the phase space introduced by Hale and Kato [28] and follow the terminology used in [26]. The phase space defined above also satisfies the following axioms:
(A1) If such that and . Then the following conditions hold:
(i) for .
(ii) for where : are independent of x, the function is strictly positive and continuous, is locally bounded.
(A2) The space is complete.
For any , the function for , is defined as . Then for any function satisfying the axiom (A1) with , one can extend the mapping by setting , to the whole interval . Moreover, let us introduce a set
Assume that is a continuous and bounded function such that the map is continuous from into and for each ,
Lemma 3
([26]). Let be a function such that and . Then
where
The theory of evolution family is an important tool to study the controllability of non-autonomous systems. Let us first provide the definition of the evolution family.
Definition 4
([15]). A family of bounded linear operators , on X is called an evolution system if the following two conditions are satisfied:
(i) , for .
(ii) The mapping is strongly continuous for .
Now, let us list the following assumptions.
(R1) is a closed operator, whose domain is independent of t and dense in X.
(R2) For and , the resolvent operator exists. There exists such that
(R3) For , there exist constants such that
(R4) The operator is compact for some , where is the resolvent set of .
Lemma 4
([1]). Suppose that (R1)–(R4) hold. Then there exists a unique evolution family , satisfying:
(1) There exists a constant such that , for .
(2) is a compact operator for .
Theorem 1
([29]). (Krasnoselskii’s Fixed Point Theorem) Let Ω be a bounded closed and convex subset of a Banach space X. Suppose that be two operators satisfying
(i) for all .
(ii) is a contraction and is completely continuous.
Then the equation has a solution on Ω.
Definition 5.
A function is said to be a mild solution of the system (1) if it satisfies
3. Main Results
In this section, our aim is to obtain the controllability results for system (1).
Definition 6.
System (1) is said to be exactly controllable on the interval J if for the initial state and arbitrary final state , there exists a control such that the mild solution of (1) satisfies .
Definition 7.
System (1) is said to be totally controllable on the interval J if for the initial state and arbitrary final state of each sub-interval for , there exists a control such that the mild solution of (1) satisfies .
Remark 1.
If a system is totally controllable on J, then it is exactly controllable on J. However, the converse is not true.
The following hypotheses will be used in this section.
(H1)
The evolution family generated byis compact.
(H2)
Let be such thatand. The functionsatisfies that:
- (i)
- The function is measurable on J and the function is continuous on for every .
- (ii)
- For each , the function is continuous.
- (iii)
- For any , there exists a function such thatand
(H3)
For each , the linear operatordefined by
such that
(i) Either has an inverse , which take values in and there exists constant such that .
(H4)
The functions is continuous and there exists a positive constantsuch that
(H5)
is a continuous operator and there exist nonnegative numberssuch that for all,
Now we are in a position to give our main results. For convenience, let
For , let y be the function defined by
where . It is easy to see that for any with and is the continuous function on J. Let with the norm . For , we define . For , we denote by
If satisfies the solution (2) then we can decompose as which implies for , and satisfied
Lemma 5.
If all the assumptions (H1)–(H5) are satisfied, then the control function for the system (1) has an estimate , where
Proof.
For any , the feedback control function is defined as follows:
From Lemma 4, we have
where , . □
Theorem 2.
Assume that (H1)–(H5) hold. Then, system (1) is totally controllable on J provided that
, and
Proof.
One can define an operator F as follows:
where
The proof is divided into four steps.
Step 1. Claim that there exists such that .
Suppose on the contrary, for each , there exists such that .
Using Lemma 3, for , we get
where .
Then, by (H2)–(H4) and Lemma 4, one can get that
For , we have
Dividing both sides by r and taking the upper limit as , we have
It is a contradiction, which means that there exists r such that .
Step 2. Claim that is a contraction map.
For any , , one can get that
From assumption, we conclude that is a contraction map.
Step 3. Claim that is continuous on .
Suppose such that
By Lemma 3, one can know that
for all . Also, for all , we obtain that
From the above inequalities, we infer that
By (H2), (H3), and Lemma 4, we know that
From (5), we have
Therefore, by (13) and (14), (H2), (H4), and the Lebesgue dominated convergence theorem, we obtain
namely, is continuous on .
Step 4. Claim that is compact.
First, we claim that is equiregulated. For any , one can get that
According to the strong continuity of , and applying dominated convergence theorem, one can easily derive that all tend to zero independently of x as . Let
Then, by Lemma 1, we know that is a regulated function. Hence,
In a similar way, as is clearly established. According to the above discussion, one can also derive that
for every . So is equiregulated.
Next, we claim that is compact. To prove this, we show that the set is relatively compact in X, for any .
For , the set is compact in X. Let be fixed. For any , we define an operator on as following:
Using Lemma 4, Lemma 5, (H2), and (H3), one can estimate as
Since is compact for and is bounded on , we obtain that the set is relatively compact in X. On the other hand,
where This implies that for , the set is relatively compact in X. From Lemma 2, one can know that the set is relatively compact in .
Hence, is a completely continuous operator on . Therefore, by Theorem 1, we conclude that F has a fixed point. To sum up, system (1) is totally controllable on J. The proof is completed. □
4. Examples
This section mainly focuses on the applications of our theoretical outcomes.
4.1. Application-I
Consider the following measure evolution system with state-dependent delay:
where and is Hölder continuous function of order , that is, there exists a C such that
Moreover, assume that the function is continuous and .
Conclusion: System (16) is totally controllable on J.
Proof.
It is evident that is a left continuous and nondecreasing function on J.
Define
First, let , for and the family of operators defined as , with the domain . We define the operator as
with the domain . Furthermore, for , the operator can be written
where and are the eigenvalues and the corresponding normalized eigenfunctions of the operator , respectively. The operator satisfies the conditions (R1)–(R4). Then by Lemma 4, we obtain the existence of a unique evolution system and it is compact for . The evolution system can be written as
Next, for , the linear operator is defined by
It is easy to see that .
Similarly, the linear operator is defined by
It is easy to see that . Hence, one can easily that .
Let , then . One can define
Set, . We have,
and
Therefore, for ,
namely, (H5) holds by taking .
Moreover, one can obtain that for ,
Thus, (H2) holds by taking . It is easy to know that .
In the end, suppose is sufficiently small such that
Consequently, by Theorem 2, system (16) is totally controllable on J. □
4.2. Application-II
Digital filters have attracted the attention of many researchers over the past few decades. In fact, the digital filter is a structure that plays the role of frequency selection and is mainly composed of adders, multipliers, and delayers. In addition, the digital filter also has the advantages of high precision, high reliability, programmable change of characteristics or multiplexing, and easy integration.
The main function of the digital filter is to remove the useless signal and get the useful signal. Therefore, it is widely used in various fields such as spectrum analysis, speech and image processing, automatic control, pattern recognition, and digital communication.
For example, suppose that a machine can estimate the electrical activity of a baby’s heart (EKG) while remaining in the womb. Some signals may be weakened by the respiration and pulse of the mother. A digital filter can be used to remove these unwanted signals so that the remaining useful signals can be examined separately.
Motivated by the designs of filters investigated in Ravichandran et al. [17], Subashini et al. [30], and Vijayakumar [18] and Udhayakumar, we have introduced the filter pattern for the considered system which is shown in Figure 1.
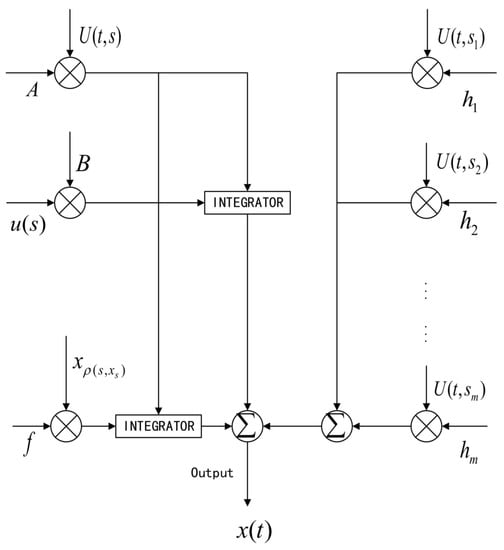
Figure 1.
Filter system.
- Product modulator-1 accepts the input A and produces the output as .
- Product modulator-2 accepts the input B and produces the output as .
- Product modulator-3 accepts the input f and produces the output as .
- Here integrators performed the integral of , over the period t.
In addition,
- (i)
- Inputs and are combined and multiplying with an output of integrator over .
- (ii)
- Inputs and are combined and multiplying with an output of integrator over
Lastly, we move all the outputs from the integrators to the summer network. Hence, our output of is acquired, which is bounded and totally controllable.
Author Contributions
Investigation, Y.W., Y.L. (Yongyang Liu) and Y.L. (Yansheng Liu). All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China: 62073202, Natural Science Foundation of Shandong Province: ZR2020MA007, Doctoral Research Funds of Shandong Management University: SDMUD202010, QiHang Research Project Funds of Shandong Management University: QH2020Z02.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
All data generated or analyzed during this study are included in this published article.
Acknowledgments
The authors are thankful to the editor and anonymous referees for their valuable comments and suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Arora, S.; Dabas, J. Existence and approximate controllability of non-autonomous functional impulsive evolution inclusions in Banach spaces. J. Differ. Equ. 2022, 307, 83–113. [Google Scholar] [CrossRef]
- Arora, S.; Dabas, J. Approximate controllability of the non-autonomous impulsive evolution equation with state-dependent delay in Banach spaces. Nonlinear Anal. Hybrid Syst. 2021, 39, 100989. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Y. Multiple solutions for a class of boundary value problems of fractional differential equations with generalized Caputo derivatives. AIMS Math. 2021, 6, 1–24. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Y. Multiple positive solutions for a class of boundary value problem of fractional (p,q)-difference equations under (p,q)-integral boundary conditions. J. Math.-UK 2021, 13, 2969717. [Google Scholar] [CrossRef]
- Wouw, N.; Leine, R. Tracking control for a class of measure differential inclusions. In Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008. [Google Scholar]
- Hernández, E.; O’regan, D. On a new class of abstract impulsive differential equations. Proc. Am. Math. Soc. 2013, 141, 1641–1649. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Fěckan, M. Non-Instantaneous Impulsive Differential Equations; IOP: Bristol, UK, 2018. [Google Scholar]
- Borah, J.; Bora, S. Existence of mild solutions for a class of fractional non-autonomous evolution equations with delay. Fract. Calc. Appl. Anal. 2019, 22, 1–14. [Google Scholar] [CrossRef]
- Chalishajar, D.; Kumar, A. Total controllability of the second order semi-linear differential equation with infinite delay and non-instantaneous impulses. Math. Comput. Appl. 2018, 23, 32. [Google Scholar] [CrossRef] [Green Version]
- Kumar, S.; Mohammad, S. Approximate controllability of non-instantaneous impulsive semilinear measure driven control system with infinite delay via fundamental solution. IMA J. Math. Control Inf. 2020, 38, 552–575. [Google Scholar] [CrossRef]
- Wang, J.; Ibrahim, A.; Fečkan, M.; Zhou, Y. Controllability of fractional non-instantaneous impulsive differential inclusions without compactness. IMA J. Math. Control Inf. 2017, 36, 443–460. [Google Scholar] [CrossRef]
- Lygeros, J.; Tomlin, C. Hybrid Systems: Modeling, Analysis and Control; Tech. Rep. UCB/ERL M; Electronic Research Laboratory, University of California: Berkeley, CA, USA, 2008; Volume 99, p. 6. Available online: https://www.researchgate.net/publication/260082743 (accessed on 28 December 2008).
- Das, P.; Sharma, R. Existence and stability of measure differential equations. Czechoslovak. Math. J. 1972, 22, 145–158. [Google Scholar] [CrossRef]
- Pandit, S.; Deo, S. Differential Systems Involving Impulses; Springer: Berlin/Heidelberg, Germany, 1982. [Google Scholar]
- Satco, B. Regulated solutions for nonlinear measure driven equations. Nonlinear Anal. 2014, 13, 22–31. [Google Scholar] [CrossRef]
- Petrusel, A.; Satco, B. Semilinear evolution equations with distributed measures. Fixed. Point. Theory. Appl. 2015, 2015, 145. [Google Scholar] [CrossRef] [Green Version]
- Ravichandran, C.; Valliammal, N.; Nieto, J.J. New results on exact controllability of a class of fractional neutral integro-differential systems with state-dependent delay in Banach spaces. J. Frankl. Inst. 2020, 356, 1535–1565. [Google Scholar] [CrossRef]
- Vijayakumar, V.; Udhayakumar, R. Results on approximate controllability for non-densely defined Hilfer fractional differential system with infinite delay. Chaos Soliton Fract. 2020, 139, 110019. [Google Scholar] [CrossRef]
- Cao, Y.; Sun, J. Controllability of measure driven evolution systems with nonlocal conditions. Appl. Math. Comput. 2017, 299, 119–126. [Google Scholar] [CrossRef]
- Cao, Y.; Sun, J. Approximate controllability of semilinear measure driven systems. Math. Nachr. 2018, 291, 1979–1988. [Google Scholar] [CrossRef]
- Gou, H.; Li, Y. Existence and approximate controllability of semilinear measure driven systems with nonlocal conditions. Bull. Iran. Math. Soc. 2021, 48, 769–789. [Google Scholar] [CrossRef]
- Gu, H.; Sun, Y. Nonlocal controllability of fractional measure evolution equation. J. Inequal. Appl. 2020, 2020, 60. [Google Scholar] [CrossRef]
- Kumar, S.; Abdal, S.M. Approximate controllability of nonautonomous second-order nonlocal measure driven systems with state-dependent delay. Int. J. Control 2022, 2022, 1–12. [Google Scholar] [CrossRef]
- Wan, X.; Sun, J. Approximate controllability for abstract measure differential systems. Syst. Control Lett. 2012, 61, 50–54. [Google Scholar] [CrossRef]
- Sharma, R. An abstract measure differential equation. Proc. Am. Math. Soc. 1972, 32, 503–510. [Google Scholar] [CrossRef]
- Hino, Y. Functional Differential Equations with Infinite Delay; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Leonov, G.; Nijmeijer, H. Dynamics and Control of Hybrid Mechanical Systems. In World Scientific Series on Nonlinear Science Series B; Singapore: World Scientific Publishing, 2010; Volume 14, Available online: https://www.worldscientific.com/worldscibooks/10.1142/7421 (accessed on 10 January 2010).
- Hale, J.; Kato, J. Phase space for retarded equations with infinite delay. Funk. Ekvac. 1978, 21, 11–41. [Google Scholar]
- Krasnosel’skii, M.A. Some problems of nonlinear analysis. In American Mathematical Society Translations, Ser. 2; American Mathematical Society: Providence, RI, USA, 1958; Volume 10, pp. 345–409. [Google Scholar]
- Subashini, R.; Jothimani, K.; Nisar, K.S.; Ravichandran, C. New results on nonlocal functional integrodifferential equations via Hilfer fractional derivative. Alex. Eng. J. 2020, 59, 2891–2899. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).