
Indirect Neural-Enhanced Integral Sliding Mode Control for Finite-Time Fault-Tolerant Attitude Tracking of Spacecraft

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
- A novel integral sliding mode surface was constructed by utilizing the technique of adding a power integrator, based on which the integral sliding mode controller was developed with no singularity problem existing in the conventional terminal sliding mode control.
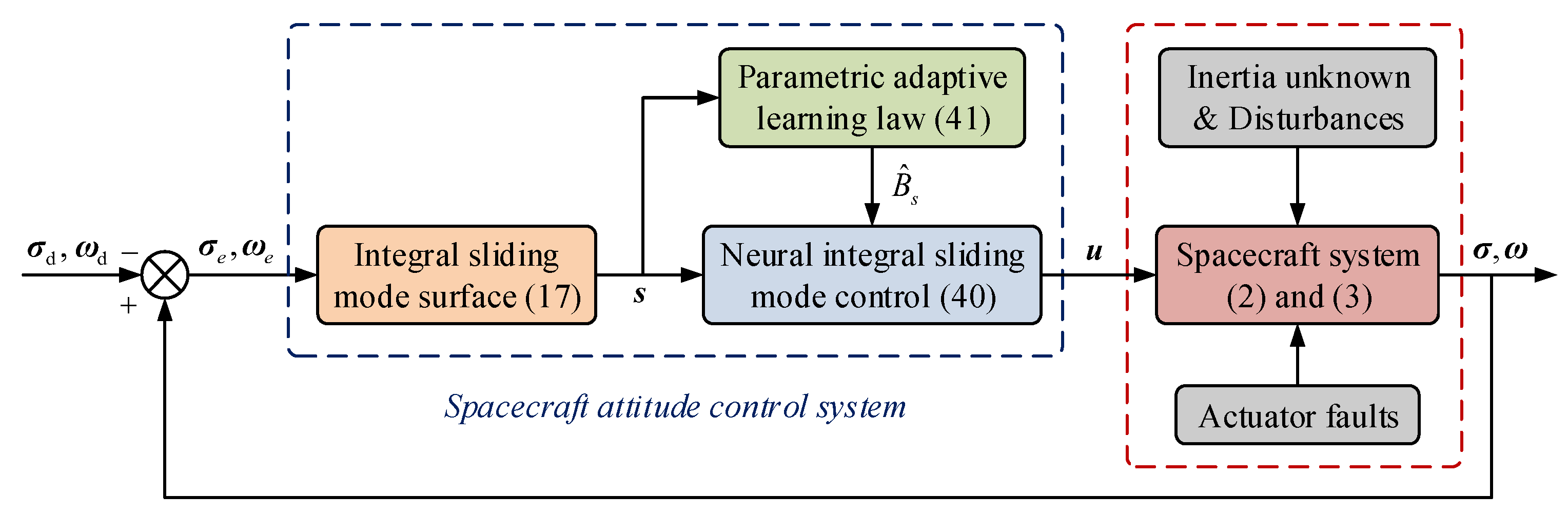
- The NN was embedded into the integral sliding mode controller to compensate the lumped uncertainty and replace the robust switching term. In this way, the chattering phenomenon was significantly suppressed. Particularly, the mechanism of indirect neural approximation was introduced through inequality relaxation. Benefiting from this design, only a single learning parameter was required to be adjusted online, and thus the proposed controller was computationally simple, which made it suitable for onboard implementations.
- The practical finite-time stability of the resulting closed-loop system was theoretically achieved. The proposed controller could guarantee that the attitude and angular velocity tracking errors were regulated to the minor residual sets around zero in a finite time. It was noteworthy that the proposed controller was not only strongly robust against unknown inertia and disturbances, but also highly insensitive to actuator faults.
2. Problem Description and Preliminaries
2.1. Notations
2.2. Problem Statement
2.3. Useful Lemmas
3. Control Design and Stability Argument
3.1. Integral Sliding Mode Surface Design
3.2. Neural Integral Sliding Mode Control Design
4. Simulations and Comparisons
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Wen, J.Y.; Kreutz-Delgado, K. The attitude control problem. IEEE Trans. Autom. Control 1991, 36, 1148–1162. [Google Scholar] [CrossRef]
- Tsiotras, P. Further passivity results for the attitude control problem. IEEE Trans. Autom. Control 1998, 43, 1597–1600. [Google Scholar] [CrossRef] [Green Version]
- Su, Y.; Zheng, C. Globally asymptotic stabilization of spacecraft with simple saturated proportional-derivative control. J. Guid. Control Dyn. 2011, 34, 1932–1936. [Google Scholar] [CrossRef]
- Su, Y.; Zheng, C. Velocity-free saturated PD control for asymptotic stabilization of spacecraft. Aerosp. Sci. Technol. 2014, 39, 6–12. [Google Scholar] [CrossRef]
- Lo, S.-C.; Chen, Y.-P. Smooth sliding-mode control for spacecraft attitude tracking maneuvers. J. Guid. Control Dyn. 1995, 18, 1345–1349. [Google Scholar] [CrossRef]
- Yeh, F.-K. Sliding-mode adaptive attitude controller design for spacecraft with thrusters. IET Control. Theory Appl. 2010, 4, 1254–1264. [Google Scholar] [CrossRef]
- Zhu, Z.; Xia, Y.; Fu, M. Adaptive sliding mode control for attitude stabilization with actuator saturation. IEEE Trans. Ind. Electron. 2011, 58, 4898–4907. [Google Scholar] [CrossRef]
- Lu, K.; Xia, Y.; Zhu, Z.; Basin, M.V. Sliding mode attitude tracking of rigid spacecraft with disturbances. J. Frankl. Inst. 2012, 349, 413–440. [Google Scholar] [CrossRef]
- Kristiansen, R.; Nicklasson, P.J.; Gravdahl, J.T. Satellite attitude control by quaternion-based backstepping. IEEE Trans. Control Syst. Technol. 2009, 17, 227–232. [Google Scholar] [CrossRef]
- Ali, I.; Radice, G.; Kim, J. Backstepping control design with actuator torque bound for spacecraft attitude maneuver. J. Guid. Control Dyn. 2010, 33, 254–259. [Google Scholar] [CrossRef] [Green Version]
- Wu, B.; Wang, D.; Poh, E.K. High precision satellite attitude tracking control via iterative learning control. J. Guid. Control Dyn. 2015, 38, 528–534. [Google Scholar] [CrossRef]
- Yao, Q. Robust adaptive iterative learning control for high precision attitude tracking of spacecraft. J. Aerosp. Eng. 2021, 34, 04020108. [Google Scholar] [CrossRef]
- Leeghim, H.; Choi, Y.; Bang, H. Adaptive attitude control of spacecraft using neural networks. Acta Astronaut 2009, 64, 778–786. [Google Scholar] [CrossRef]
- Zou, A.-M.; Kumar, K.D. Adaptive fuzzy fault-tolerant attitude control of spacecraft. Control Eng. Pract. 2011, 19, 10–21. [Google Scholar] [CrossRef]
- Li, M.; Hou, M.; Yin, C. Adaptive attitude stabilization control design for spacecraft under physical limitations. J. Guid. Control Dyn. 2016, 39, 2176–2180. [Google Scholar] [CrossRef]
- Huo, B.; Xia, Y.; Yin, L.; Fu, M. Fuzzy adaptive fault-tolerant output feedback attitude-tracking control of rigid spacecraft. IEEE Trans. Syst. Man. Cybern. Syst. 2017, 47, 1898–1908. [Google Scholar] [CrossRef]
- Du, H.; Li, S. Finite-time attitude stabilization for a spacecraft using homogeneous method. J. Guid. Control Dyn. 2012, 35, 740–748. [Google Scholar]
- Su, Y.; Zheng, C. Simple nonlinear proportional-derivative control for global finite-time stabilization of spacecraft. J. Guid. Control Dyn. 2015, 38, 173–178. [Google Scholar]
- Gui, H.; Jin, L.; Xu, S. Simple finite-time attitude stabilization laws for rigid spacecraft with bounded inputs. Aerosp. Sci. Technol. 2015, 42, 176–186. [Google Scholar] [CrossRef]
- Zou, A.-M.; de Ruiter, A.H.J.; Kumar, K.D. Finite-time output feedback attitude control for rigid spacecraft under control input saturation. J. Frankl. Inst. 2016, 353, 4442–4470. [Google Scholar]
- Du, H.; Li, S.; Qian, C. Finite-time attitude tracking control of spacecraft with application to attitude synchronization. IEEE Trans. Autom. Control 2011, 56, 2711–2717. [Google Scholar] [CrossRef]
- Jiang, B.; Li, C.; Ma, G. Finite-time output feedback attitude control for spacecraft using “Adding a power integrator” technique. Aerosp. Sci. Technol. 2017, 66, 342–354. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Yu, H. Adaptive finite-time attitude tracking control for spacecraft with disturbances. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1297–1305. [Google Scholar] [CrossRef]
- Yao, Q. Robust finite-time control design for attitude stabilization of spacecraft under measurement uncertainties. Adv. Space Res. 2021, 68, 3159–3175. [Google Scholar] [CrossRef]
- Jin, E.; Sun, Z. Robust controllers design with finite time convergence for rigid spacecraft attitude tracking control. Aerosp. Sci. Technol. 2018, 12, 324–330. [Google Scholar] [CrossRef]
- Li, S.; Wang, Z.; Fei, S. Comments on the paper: Robust controllers design with finite time convergence for rigid spacecraft attitude tracking control. Aerosp. Sci. Technol. 2011, 15, 193–195. [Google Scholar] [CrossRef]
- Zhu, Z.; Xia, Y.; Fu, M. Attitude stabilization of rigid spacecraft with finite-time convergence. Int. J. Robust Nonlinear Control 2011, 21, 686–702. [Google Scholar] [CrossRef]
- Lu, K.; Xia, Y. Adaptive attitude tracking control for rigid spacecraft with finite-time convergence. Automatica 2013, 49, 3591–3599. [Google Scholar] [CrossRef]
- Song, Z.; Li, H.; Sun, K. Finite-time control for nonlinear spacecraft attitude based on terminal sliding mode technique. ISA Trans. 2014, 53, 117–124. [Google Scholar] [CrossRef]
- Pukdeboon, C.; Siricharuanun, P. Nonsingular terminal sliding mode based finite-time control for spacecraft attitude tracking. Int. J. Control Autom. Syst. 2014, 12, 530–540. [Google Scholar] [CrossRef]
- Han, Z.; Zhang, K.; Yang, T.; Zhang, M. Spacecraft fault-tolerant control using adaptive non-singular fast terminal sliding mode. IET Control Theory Appl. 2016, 10, 1991–1999. [Google Scholar] [CrossRef]
- Shao, S.; Zong, Q.; Tian, B.; Wang, F. Finite-time sliding mode attitude control for rigid spacecraft without angular velocity measurement. J. Frankl. Inst. 2017, 354, 4656–4674. [Google Scholar] [CrossRef]
- Song, Z.; Duan, C.; Su, H.; Hu, J. Full-order sliding mode control for finite-time attitude tracking of rigid spacecraft. IET Control Theory Appl. 2018, 12, 1086–1094. [Google Scholar] [CrossRef]
- Guo, Y.; Huang, B.; Song, S.; Li, A.; Wang, C. Robust saturated finite-time attitude control for spacecraft using integral sliding mode. J. Guid. Control Dyn. 2019, 42, 440–446. [Google Scholar] [CrossRef]
- Jahanshahi, H.; Yousefpour, A.; Munoz-Pacheco, J.M.; Moroz, I.; Wei, Z.; Castillo, O. A new multi-stable fractional-order four-dimensional system with self-excited and hidden chaotic attractors: Dynamic analysis and adaptive synchronization using a novel fuzzy adaptive sliding mode control method. Appl. Soft Comput. 2020, 87, 105943. [Google Scholar] [CrossRef]
- Wang, S.; Bekiros, S.; Yousefpour, A.; He, S.; Castillo, O.; Jahanshahi, H. Synchronization of fractional time-delayed financial system using a novel type-2 fuzzy active control method. Chaos Solitons Fractals 2020, 136, 109768. [Google Scholar] [CrossRef]
- Xiong, P.-Y.; Jahanshahi, H.; Alcaraz, R.; Chu, Y.-M.; Gómez-Aguilar, J.F.; Alsaadi, F.E. Spectral entropy analysis and synchronization of a multi-stable fractional-order chaotic system using a novel neural network-based chattering-free sliding mode technique. Chaos Solitons Fractals 2021, 144, 110576. [Google Scholar] [CrossRef]
- Li, J.-F.; Jahanshahi, H.; Kacar, S.; Chu, Y.-M.; Gómez-Aguilar, J.F.; Alotaibi, N.D.; Alharbi, K.H. On the variable-order fractional memristor oscillator: Data security applications and synchronization using a type-2 fuzzy disturbance observer-based robust control. Chaos Solitons Fractals 2021, 145, 110681. [Google Scholar] [CrossRef]
- Bekiros, S.; Jahanshahi, H.; Bezzina, F.; Aly, A.A. A novel fuzzy mixed H2/H∞ optimal controller for hyperchaotic financial systems. Chaos Solitons Fractals 2021, 146, 110878. [Google Scholar] [CrossRef]
- Wang, Y.-L.; Jahanshahi, H.; Bekiros, S.; Bezzina, F.; Chu, Y.-M.; Aly, A.A. Deep recurrent neural networks with finite-time terminal sliding mode control for a chaotic fractional-order financial system with market confidence. Chaos Solitons Fractals 2021, 146, 110881. [Google Scholar] [CrossRef]
- Yao, Q. Adaptive fuzzy neural network control for a space manipulator in the presence of output constraints and input nonlinearities. Adv. Space Res. 2021, 67, 1830–1843. [Google Scholar] [CrossRef]
- Yao, Q. Adaptive trajectory tracking control of a free-flying space manipulator with guaranteed prescribed performance and actuator saturation. Acta Astronaut 2021, 185, 283–298. [Google Scholar] [CrossRef]
- Yao, Q. Neural adaptive learning synchronization of second-order uncertain chaotic systems with prescribed performance guarantees. Chaos Solitons Fractals 2021, 152, 111434. [Google Scholar] [CrossRef]
- Alsaade, F.W.; Yao, Q.; Al-zahrani, M.S.; Alzahrani, A.S.; Jahanshahi, H. Indirect-neural approximation-based fault-tolerant integrated attitude and position control of spacecraft proximity operations. Sensors 2022, 22, 1726. [Google Scholar] [CrossRef]
- Zou, A.-M.; Kumar, K.D.; Hou, Z.-G.; Liu, X. Finite-time attitude tracking control for spacecraft using terminal sliding mode and Chebyshev neural network. IEEE Trans. Syst. Man. Cybern Part B Cybern 2011, 41, 950–963. [Google Scholar]
- Huo, B.; Xia, Y.; Lu, K.; Fu, M. Adaptive fuzzy finite-time fault-tolerant attitude control of rigid spacecraft. J. Frankl. Inst. 2015, 352, 4225–4246. [Google Scholar] [CrossRef]
- Hughes, P.C. Spacecraft Attitude Dynamics; John Wiley and Sons: New York, NY, USA, 1986. [Google Scholar]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Yao, Q. Adaptive finite-time sliding mode control design for finite-time fault-tolerant trajectory tracking of marine vehicles with input saturation. J. Frankl. Inst. 2020, 357, 13593–13619. [Google Scholar] [CrossRef]
- Sanner, R.M.; Slotine, J.-J.E. Gaussian networks for direct adaptive control. IEEE Trans. Neural. Netw. 1992, 3, 837–863. [Google Scholar] [CrossRef]
- Hardy, G.H.; Littlewood, J.E.; Pólya, G. Inequalities; Cambridge University Press: Cambridge, MA, USA, 1952. [Google Scholar]
- Ahmed, J.; Vincent, T.C.; Bernstein, D.S. Adaptive asymptotic tracking of spacecraft attitude motion with inertia matrix identification. J. Guid. Control Dyn. 1998, 21, 684–691. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Q.; Jahanshahi, H.; Bekiros, S.; Mihalache, S.F.; Alotaibi, N.D. Indirect Neural-Enhanced Integral Sliding Mode Control for Finite-Time Fault-Tolerant Attitude Tracking of Spacecraft. Mathematics 2022, 10, 2467. https://doi.org/10.3390/math10142467
Yao Q, Jahanshahi H, Bekiros S, Mihalache SF, Alotaibi ND. Indirect Neural-Enhanced Integral Sliding Mode Control for Finite-Time Fault-Tolerant Attitude Tracking of Spacecraft. Mathematics. 2022; 10(14):2467. https://doi.org/10.3390/math10142467
Chicago/Turabian StyleYao, Qijia, Hadi Jahanshahi, Stelios Bekiros, Sanda Florentina Mihalache, and Naif D. Alotaibi. 2022. "Indirect Neural-Enhanced Integral Sliding Mode Control for Finite-Time Fault-Tolerant Attitude Tracking of Spacecraft" Mathematics 10, no. 14: 2467. https://doi.org/10.3390/math10142467
APA StyleYao, Q., Jahanshahi, H., Bekiros, S., Mihalache, S. F., & Alotaibi, N. D. (2022). Indirect Neural-Enhanced Integral Sliding Mode Control for Finite-Time Fault-Tolerant Attitude Tracking of Spacecraft. Mathematics, 10(14), 2467. https://doi.org/10.3390/math10142467