
Towards Flocking Navigation and Obstacle Avoidance for Multi-UAV Systems through Hierarchical Weighting Vicsek Model


Abstract
1. Introduction
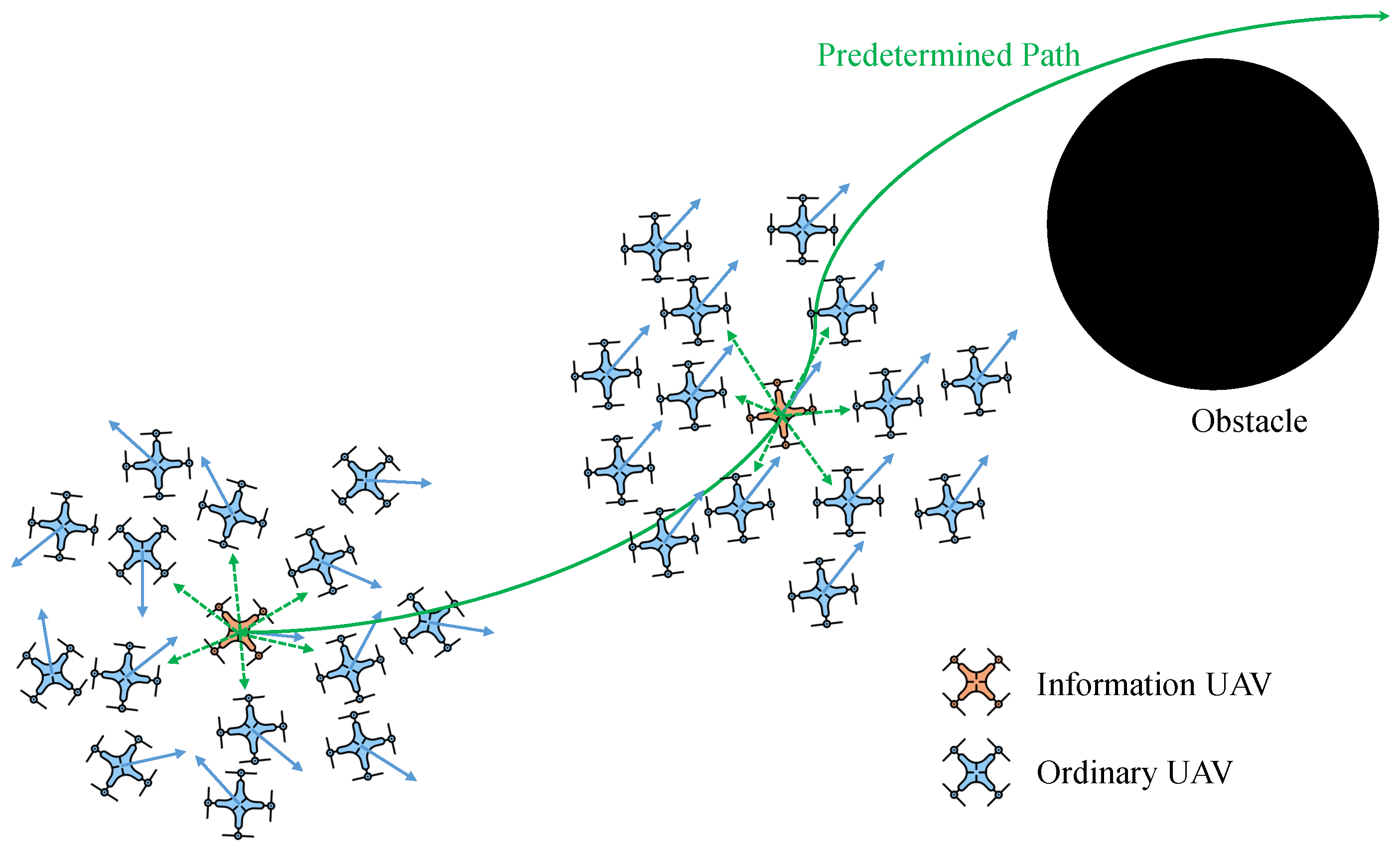
2. Flocking Navigation and Obstacle Avoidance with HWVEM
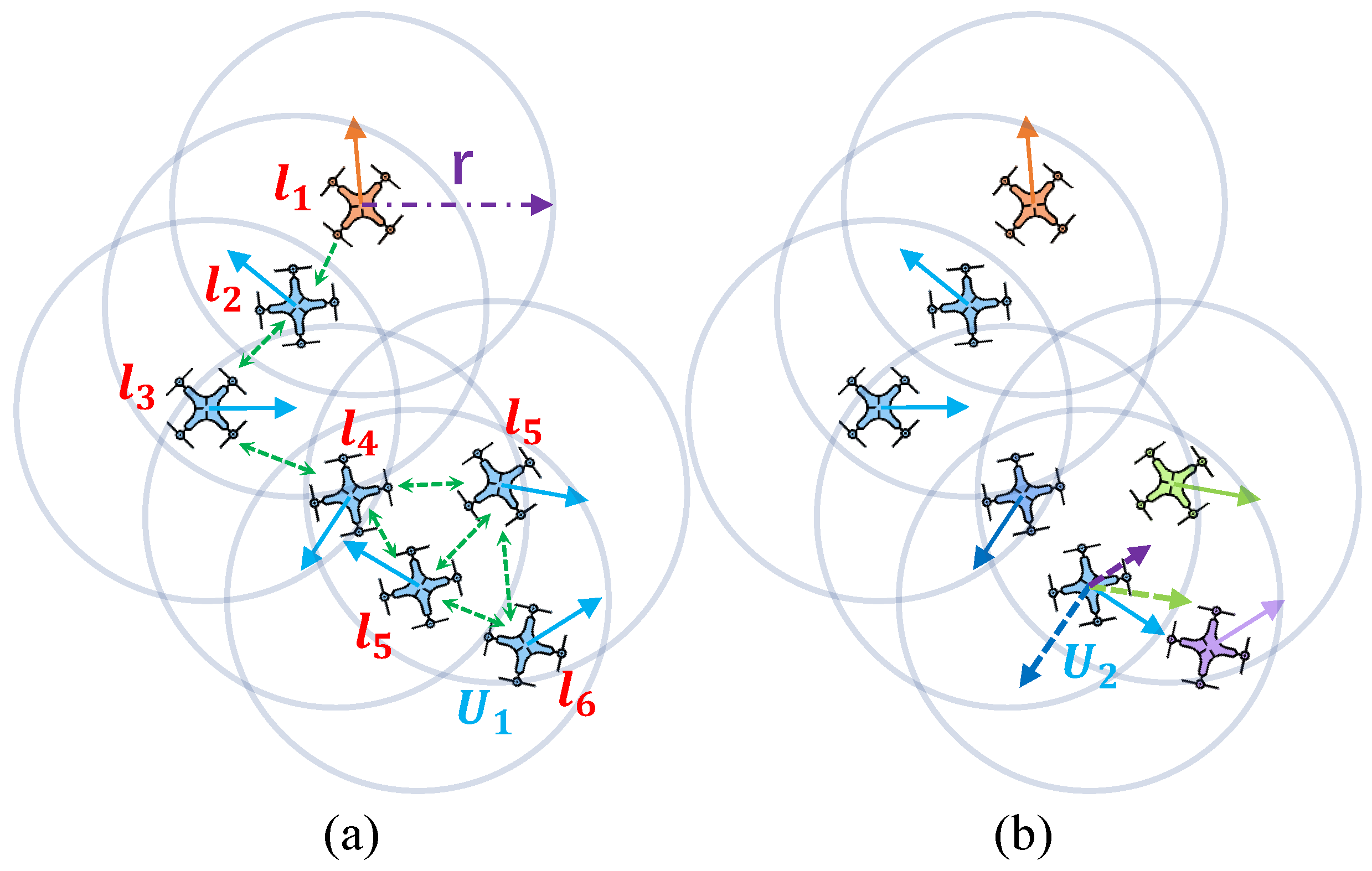
2.1. Hierarchical Weighting Mechanism
2.2. Hierarchical Weighting Vicsek Model
2.2.1. Adjacency Matrix
2.2.2. Dominance Matrix
2.2.3. Contribution Matrix
The Absolute Layer Weight
The Relative Layer Weight
The Weight of the Neighbourhood Layer Status
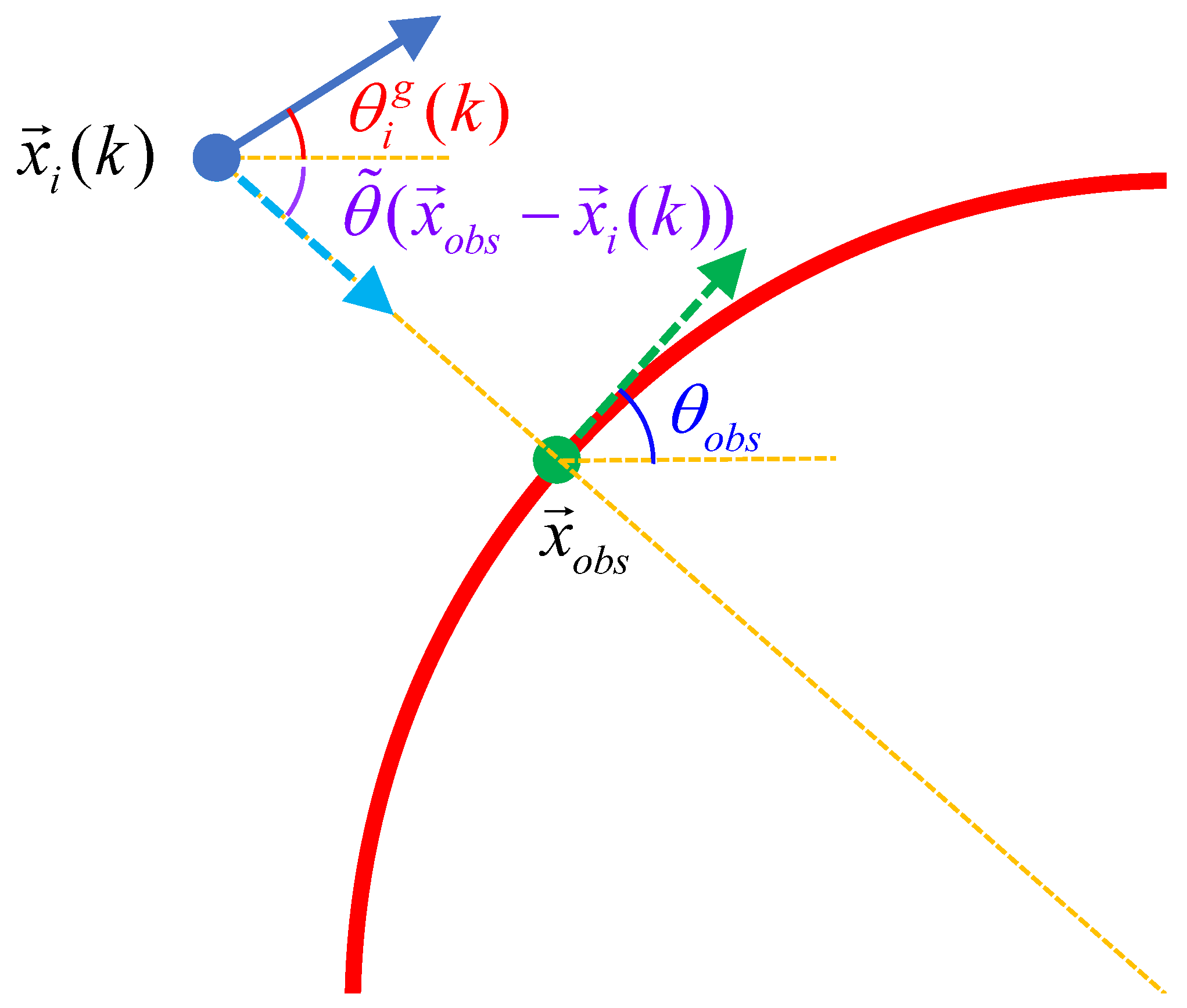
2.3. Obstacle Avoidance Mechanism
2.4. HWVEM-Based Flocking Algorithm
| Algorithm 1 HWVEM-based flocking algorithm |
| Require: |
| The position of each neighborhood individual j, |
| The velocity of each neighborhood individual j, |
| The layer of each neighborhood individual j, |
| The state of each neighborhood individual j, |
| Ensure: |
| The position of the individual i, |
| The velocity of the individual i, |
| The layer of the individual i, |
|
3. Numerical Simulation and Analysis
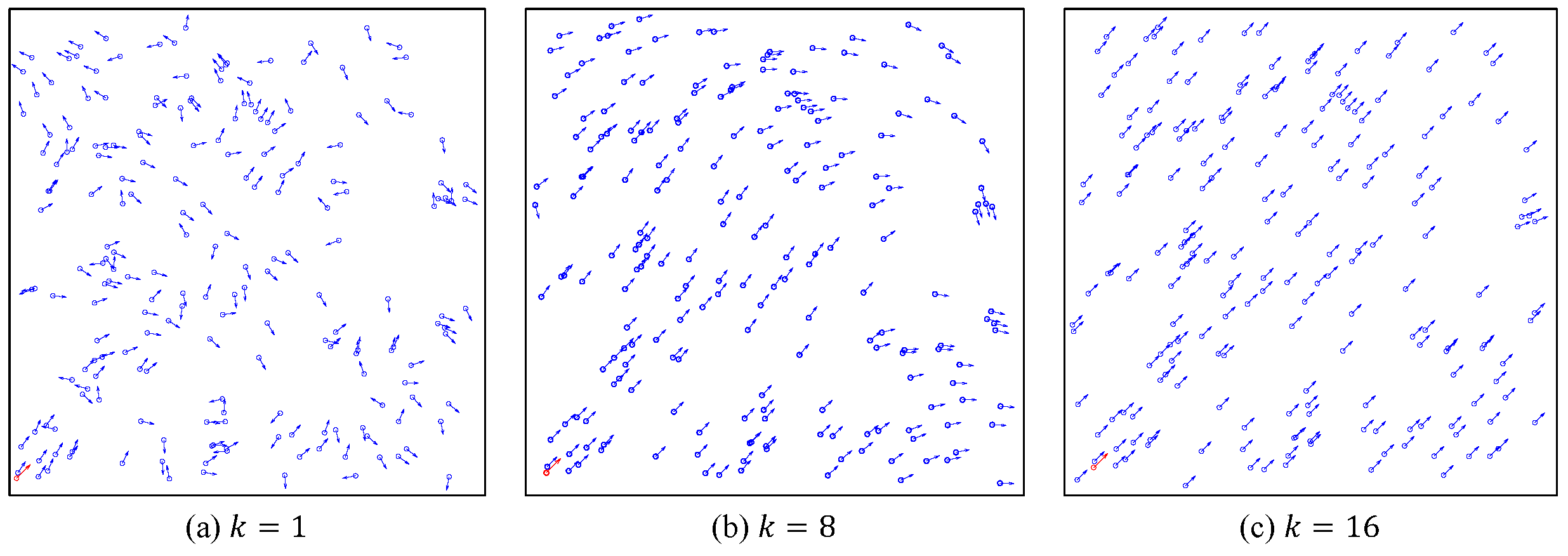
3.1. The Verification of the Model Alignment Performance
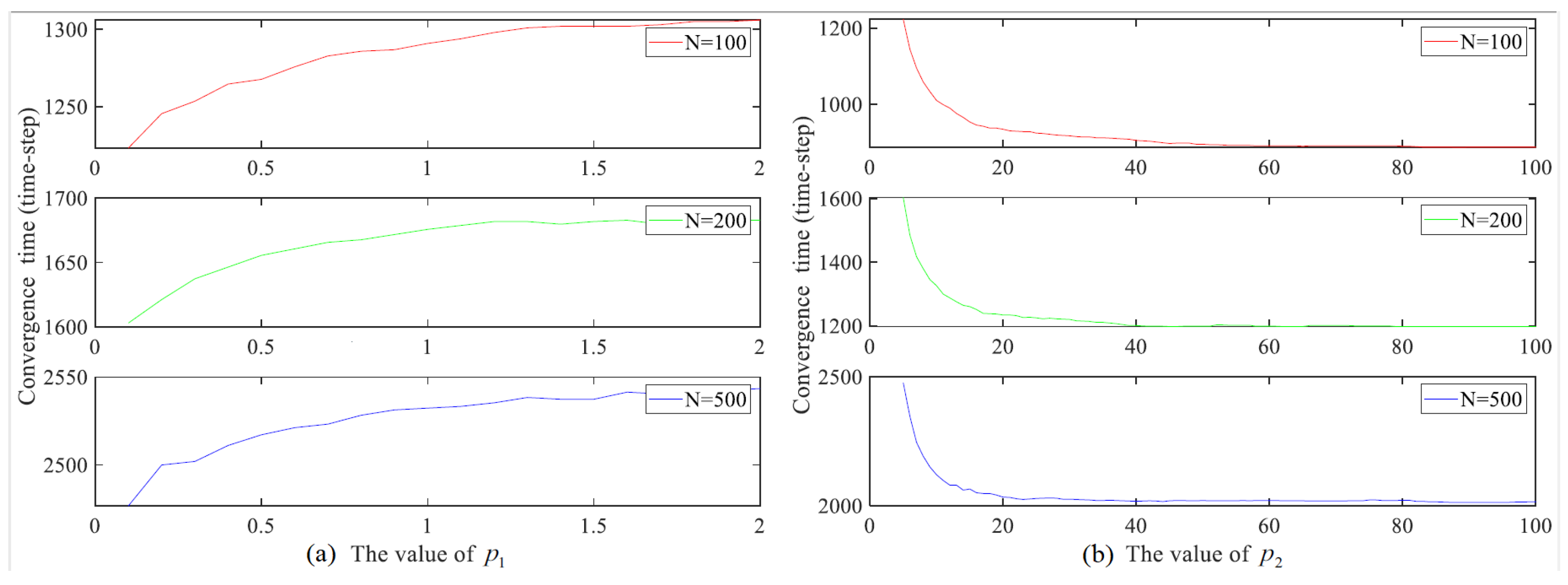
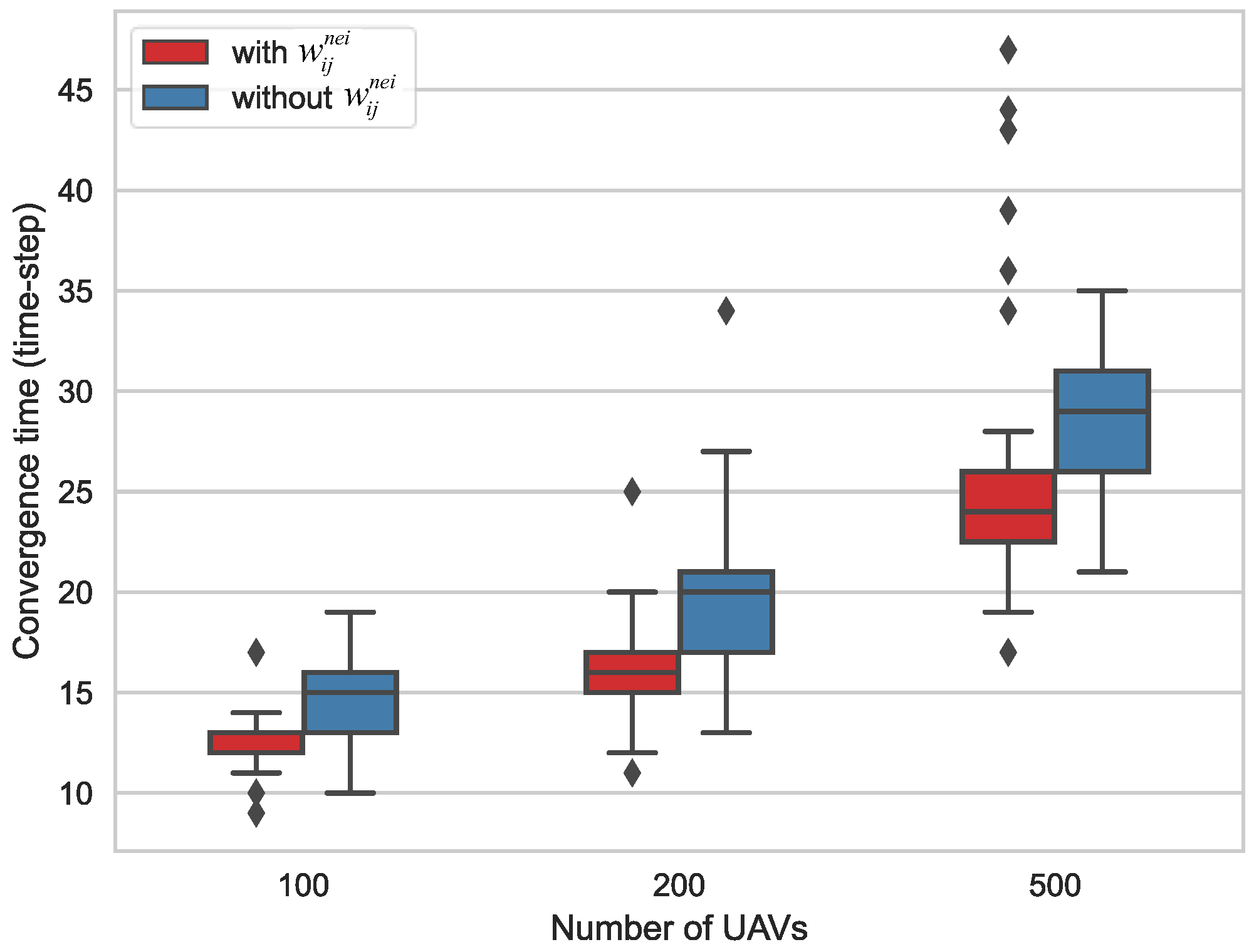
3.1.1. Contribution of Each Weighting Term
3.1.2. Comparisons of Different Models
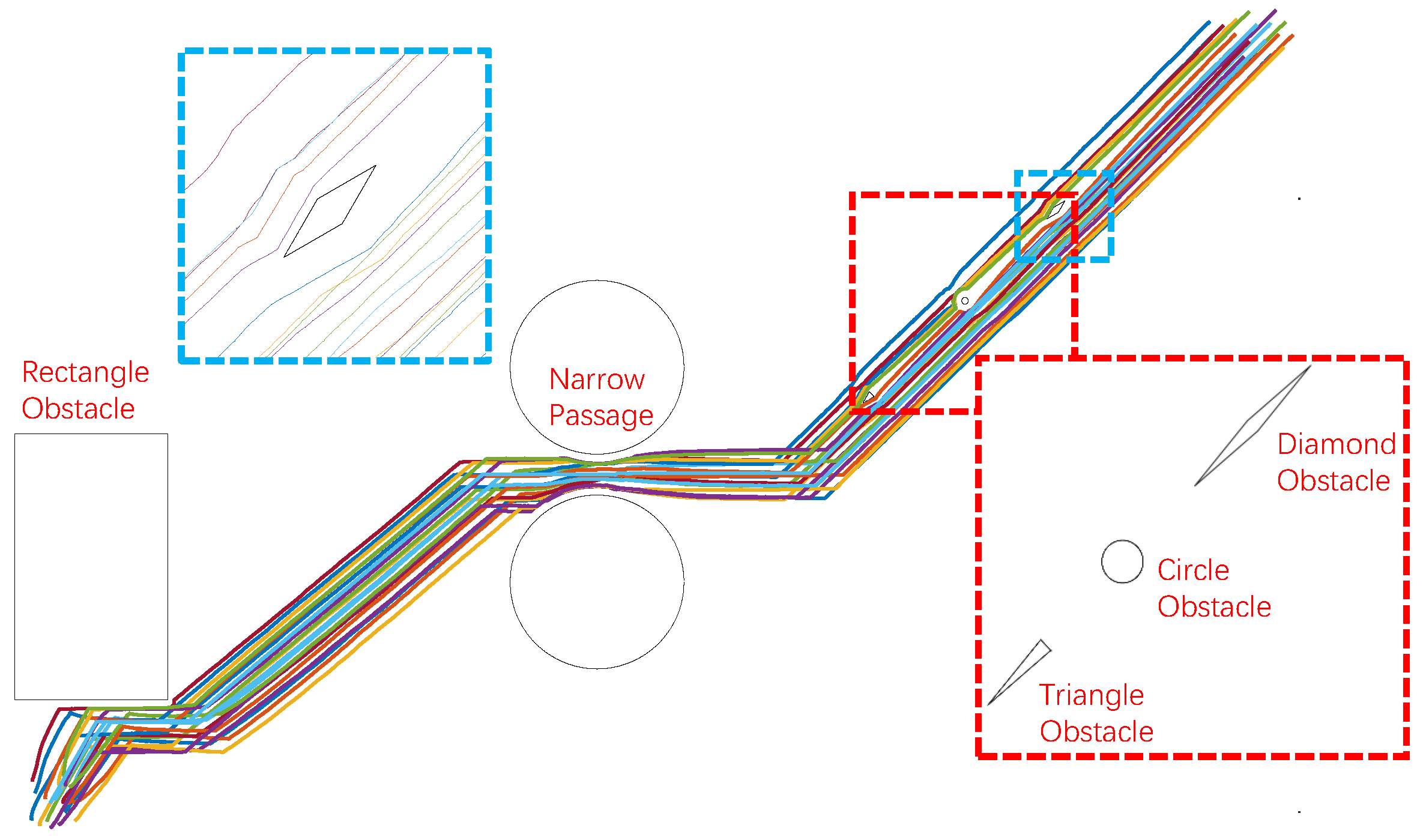
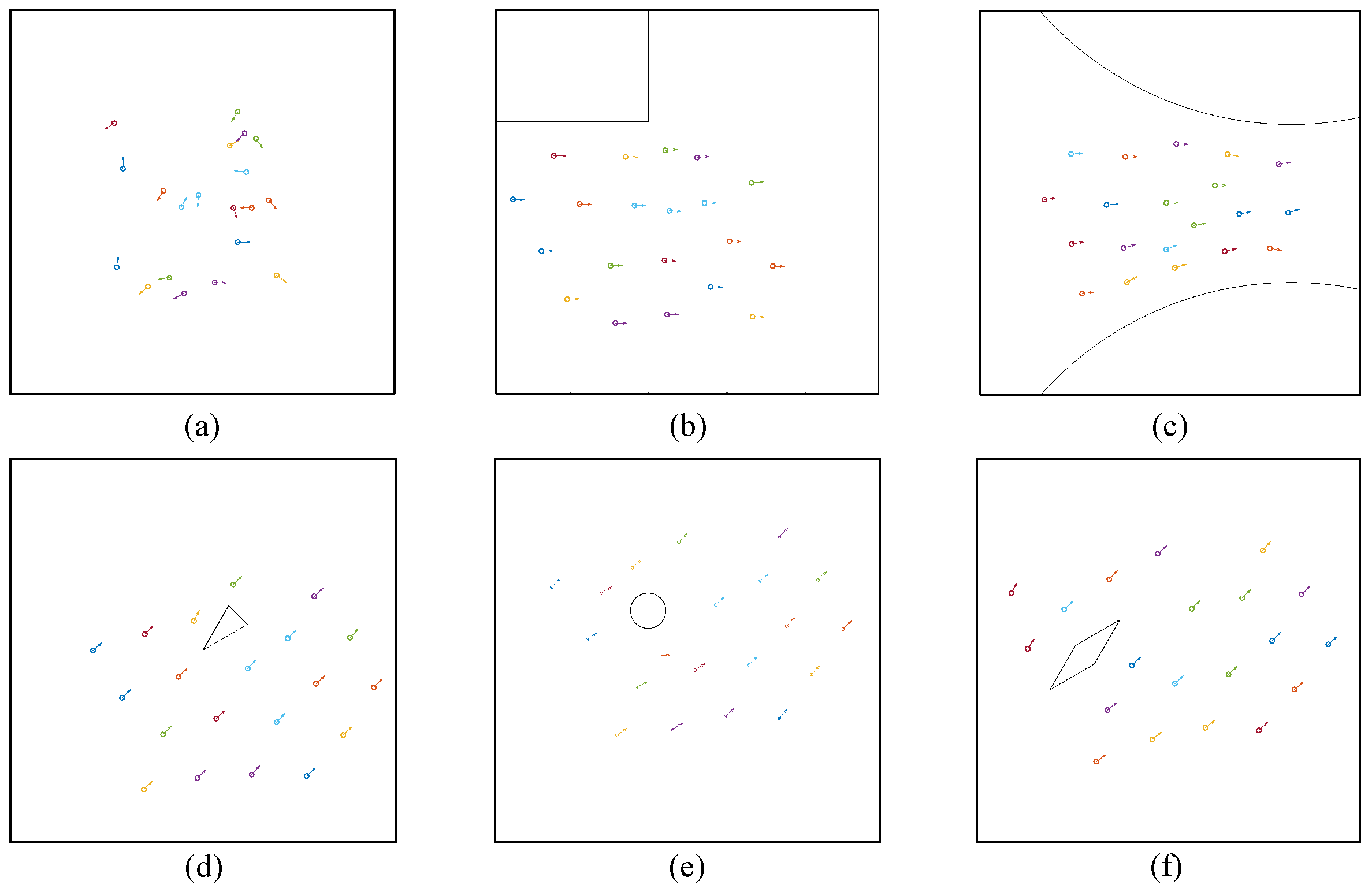
3.2. Flocking Performance in Complex Scenario
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, A.R.; Keshmiri, S.; Blevins, A.; Shukla, D.; Huang, W. Control of Multi-Agent Collaborative Fixed-Wing UASs in Unstructured Environment. J. Intell. Robot. Syst. 2019, 97, 205–225. [Google Scholar] [CrossRef]
- Parrish, J.; Edelstein-Keshet, L. Complexity, pattern, and evolutionary trade-offs in animal aggregation. Science 1999, 284, 99–101. [Google Scholar] [CrossRef] [PubMed]
- Couzin, I. Collective minds. Nature 2007, 445, 715. [Google Scholar] [CrossRef] [PubMed]
- Vicsek, T.; Zafeiris, A. Collective motion. Phys. Rep. 2012, 517, 71–140. [Google Scholar] [CrossRef]
- Beaver, L.E.; Malikopoulos, A.A. An Overview on Optimal Flocking. arXiv 2020, arXiv:2009.14279. [Google Scholar]
- Olcay, E.; Schuhmann, F.; Lohmann, B. Collective navigation of a multi-robot system in an unknown environment. Robot. Auton. Syst. 2020, 132, 103604. [Google Scholar] [CrossRef]
- Yan, C.; Xiang, X.; Wang, C. Fixed-Wing UAVs flocking in continuous spaces: A Deep reinforcement learning approach. Robot. Auton. Syst. 2020, 131, 103594. [Google Scholar] [CrossRef]
- Chen, H.; Cong, Y.; Wang, X.; Xu, X.; Shen, L. Coordinated Path-Following Control of Fixed-Wing Unmanned Aerial Vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2021, 99, 1–15. [Google Scholar]
- Hoang, D.; Tran, D.M.; Tran, T.S.; Pham, H.A. An adaptive weighting mechanism for reynolds rules-based flocking control scheme. Peerj Comput. Sci. 2021, 7, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Hayes, A.T.; Dormiani-Tabatabaei, P. Self-organized flocking with agent failure: Off-line optimization and demonstration with real robots. In Proceedings of the IEEE International Conference on Robotics & Automation, Washington, DC, USA, 11–15 May 2002; IEEE: Piscataway, NJ, USA, 2002. [Google Scholar]
- Zhou, H.; Zhao, H.; Han, T.; Huang, H.Q. Cooperative flight and evasion control of uav swarm based on rules. Syst. Eng. Electron. 2016, 38, 1374–1382. [Google Scholar]
- Vicsek, T.; Czirók, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. Novel type of phase transition in a system of self-driven drones. Phys. Rev. Lett. 1995, 75, 1226–1229. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, Y.; Tian, B.; Peng, L.; Zhang, H.T.; Wang, B.H.; Zhou, T. Accelerating consensus of self-driven swarm via adaptive speed. Phys. Stat. Mech. Its Appl. 2009, 388, 1237–1242. [Google Scholar] [CrossRef]
- Gao, J.; Chen, Z.; Cai, Y.; Xu, X. Approach to enhance convergence efficiency of Vicsek model. Control. Decis. 2009, 24, 1269–1272. [Google Scholar]
- Chen, S.; Shu, J.; Nie, S.; Cen, Y. Convergence Efficiency of a Class of Improved Vicsek Model. Inf. Control. 2011, 40, 318–322. [Google Scholar]
- Liu, X.; Xiang, X.; Chang, Y.; Yan, C.; Zhou, H.; Tang, D. Hierarchical Weighting Vicsek Model for Flocking Navigation of Drones. Drones 2021, 5, 74. [Google Scholar] [CrossRef]
- Jia, Y.; Vicsek, T. Modelling Hierarchical Flocking. New J. Phys. 2019, 21, 093048. [Google Scholar] [CrossRef]
- Vásárhelyi, G.; Virágh, C.; Somorjai, G.; Tarcai, N.; Szörényi, T.; Nepusz, T.; Vicsek, T. Outdoor flocking and formation flight with autonomous aerial robots. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3866–3873. [Google Scholar]
- Reynolds, C.W. Flocks, Herds, and Schools: A Distributed Behavioral Model. ACM SIGGRAPH Comput. Graph. 1987, 21, 25–34. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Case Setup | Method | Convergence Time (Time-Step) | Converge to Reference State | ||||
|---|---|---|---|---|---|---|---|
| Number of UAVs | Size | Avg | 25th pctl | 50th pctl | 75th pctl | ||
| 100 | 4.96 × 4.96 | VEM | 84.31 | 55.00 | 81.00 | 105.50 | No |
| VEM-A | 568.39 | 362.50 | 542.50 | 741.00 | Yes | ||
| IVEM | 62.02 | 47.00 | 62.00 | 74.50 | No | ||
| IVEM-A | 556.05 | 527.00 | 559.00 | 584.00 | Yes | ||
| WVEM | 113.70 | 83.50 | 97.00 | 122.00 | Yes | ||
| HWVEM | 12.23 | 12.00 | 12.00 | 13.00 | Yes | ||
| 200 | 7 × 7 | VEM | 153.74 | 104.00 | 135.50 | 193.50 | No |
| VEM-A | 1236.60 | 701.50 | 969.00 | 1489.50 | Yes | ||
| IVEM | 78.03 | 48.50 | 70.00 | 96.00 | No | ||
| IVEM-A | 1170.62 | 1012.50 | 1180.50 | 1290.50 | Yes | ||
| WVEM | 238.57 | 152.50 | 185.50 | 301.50 | Yes | ||
| HWVEM | 16.03 | 15.00 | 16.00 | 17.00 | Yes | ||
| 500 | 11.2 × 11.2 | VEM | 296.30 | 204.50 | 282.50 | 357.00 | No |
| VEM-A | 4097.30 | 1550.50 | 3157.00 | 4333.00 | Yes | ||
| IVEM | 40.65 | 34.50 | 39.00 | 45.50 | No | ||
| IVEM-A | 4662.11 | 3462.50 | 3807.00 | 4730.00 | Yes | ||
| WVEM | 662.36 | 370.50 | 656.00 | 757.00 | Yes | ||
| HWVEM | 24.77 | 22.50 | 24.50 | 26.00 | Yes | ||
| Test Case Setup | Method | (%) | ||||||
|---|---|---|---|---|---|---|---|---|
| Number of UAVs | Initial Size | Avg | 25th pctl | 50th pctl | 75th pctl | Avg | Avg | |
| 5 | 1.24 × 1.24 | VEM-A | 69.58 | 60.00 | 80.00 | 80.00 | 0.1779 | 0.1873 |
| IVEM-A | 69.60 | 60.00 | 60.00 | 80.00 | 0.1821 | 0.1799 | ||
| WVEM | 76.40 | 60.00 | 80.00 | 100.00 | 0.1756 | 0.1738 | ||
| HWVEM-I | 86.40 | 80.00 | 80.00 | 100.00 | 0.1848 | 0.1702 | ||
| HWVEM-II | 86.00 | 80.00 | 80.00 | 100.00 | 0.1809 | 0.1623 | ||
| 20 | 2.47 × 2.47 | VEM-A | 31.61 | 10.00 | 20.00 | 45.00 | 0.0832 | 0.1576 |
| IVEM-A | 44.65 | 30.00 | 40.00 | 55.00 | 0.0852 | 0.1168 | ||
| WVEM | 71.05 | 60.00 | 65.00 | 80.00 | 0.0828 | 0.0962 | ||
| HWVEM-I | 83.80 | 65.00 | 100.00 | 100.00 | 0.0836 | 0.0887 | ||
| HWVEM-II | 83.85 | 65.00 | 97.50 | 100.00 | 0.0832 | 0.0823 | ||
| 50 | 3.91 × 3.91 | VEM-A | 9.29 | 4.00 | 6.00 | 12.00 | 0.0528 | 0.155 |
| IVEM-A | 17.66 | 12.00 | 16.00 | 21.00 | 0.0526 | 0.1105 | ||
| WVEM | 52.54 | 42.00 | 52.00 | 62.00 | 0.0535 | 0.0772 | ||
| HWVEM-I | 82.62 | 54.00 | 100.00 | 100.00 | 0.0492 | 0.0485 | ||
| HWVEM-II | 88.38 | 97.00 | 100.00 | 100.00 | 0.0501 | 0.0427 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Yan, C.; Zhou, H.; Chang, Y.; Xiang, X.; Tang, D. Towards Flocking Navigation and Obstacle Avoidance for Multi-UAV Systems through Hierarchical Weighting Vicsek Model. Aerospace 2021, 8, 286. https://doi.org/10.3390/aerospace8100286
Liu X, Yan C, Zhou H, Chang Y, Xiang X, Tang D. Towards Flocking Navigation and Obstacle Avoidance for Multi-UAV Systems through Hierarchical Weighting Vicsek Model. Aerospace. 2021; 8(10):286. https://doi.org/10.3390/aerospace8100286
Chicago/Turabian StyleLiu, Xingyu, Chao Yan, Han Zhou, Yuan Chang, Xiaojia Xiang, and Dengqing Tang. 2021. "Towards Flocking Navigation and Obstacle Avoidance for Multi-UAV Systems through Hierarchical Weighting Vicsek Model" Aerospace 8, no. 10: 286. https://doi.org/10.3390/aerospace8100286
APA StyleLiu, X., Yan, C., Zhou, H., Chang, Y., Xiang, X., & Tang, D. (2021). Towards Flocking Navigation and Obstacle Avoidance for Multi-UAV Systems through Hierarchical Weighting Vicsek Model. Aerospace, 8(10), 286. https://doi.org/10.3390/aerospace8100286