
Adaptive Global Predefined-Time Control Method of Aerospace Aircraft


Abstract
1. Introduction
- Based on an adjustable predefined inequality condition, a nonsingular sliding mode observer with adjustable predefined-time is designed, which not only solves the singularity problem but also ensures that the disturbance boundary is independent of the observer parameters.
- A novel predefined-time controller is designed by combining novel performance function and nonsingular predefined-time sliding modes.
- The controller designed in this paper can not only ensure that the initial tracking error converges within the predefined time, but also ensures that any errors generated within the error boundary during the subsequent control process can converge within the predefined time.
2. Preliminaries and Problem Formulation
2.1. Preliminaries
2.2. Attitude Control Model for Aerospace Aircraft
3. Main Results
3.1. Predefined-Time Nonsingular Sliding Mode Observer
3.2. Novel Performance Function and Unconstrained Model for Error
3.3. Novel Global Predefined-Time Controller
- Step 1. The derivative of iswhere , .
4. Simulation Results
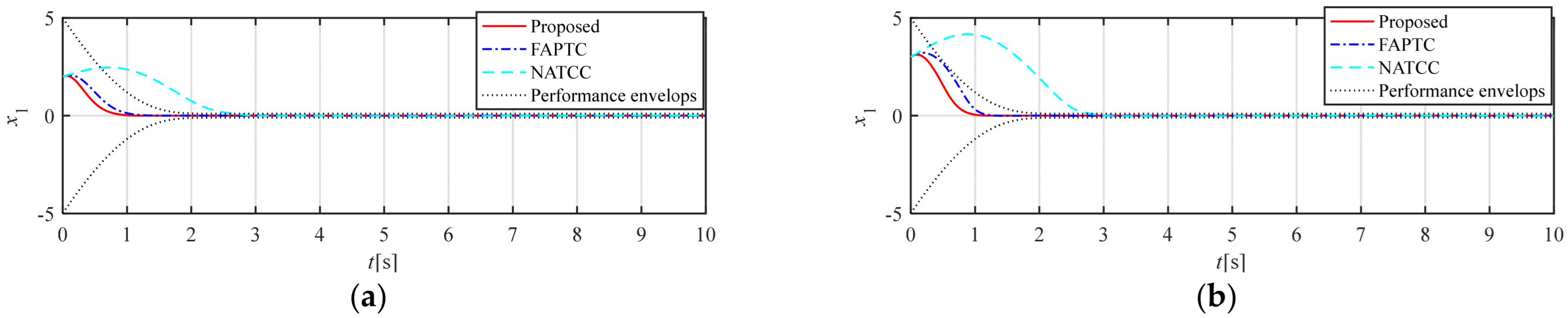
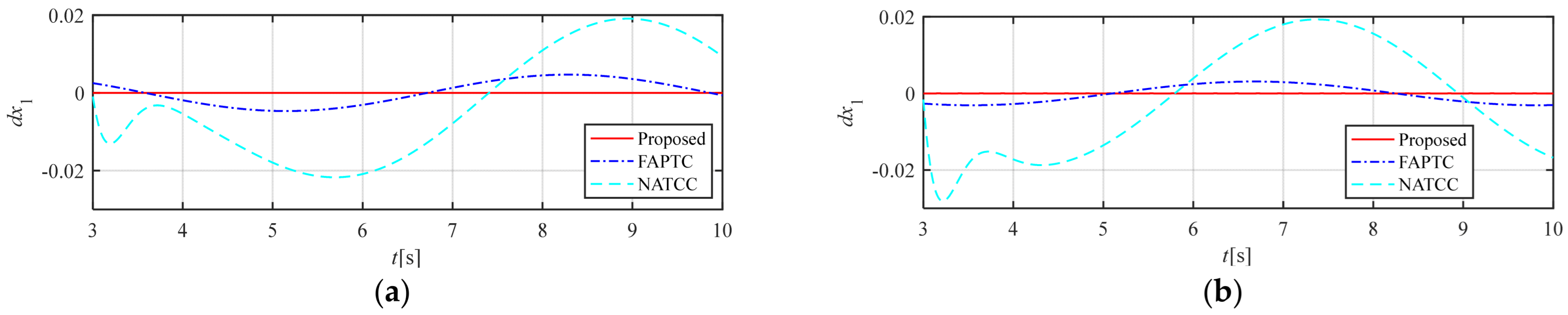
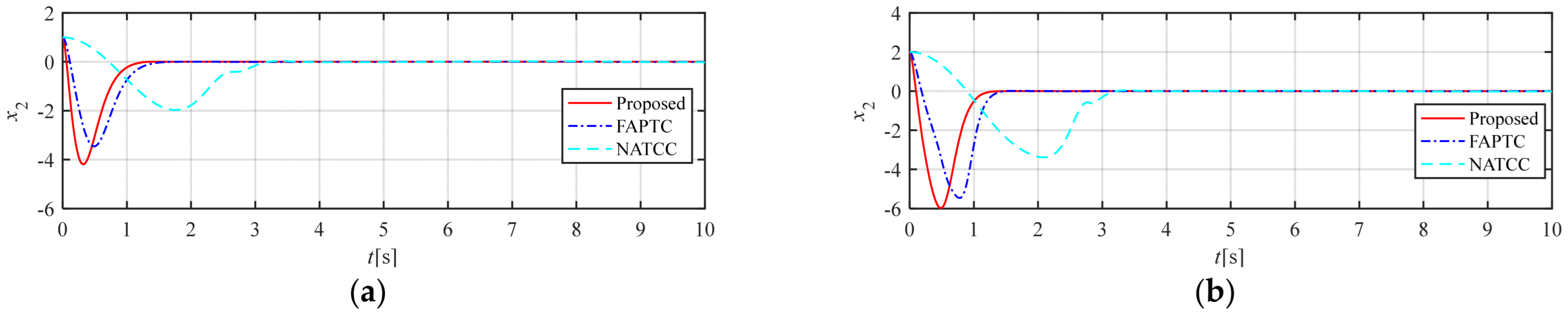
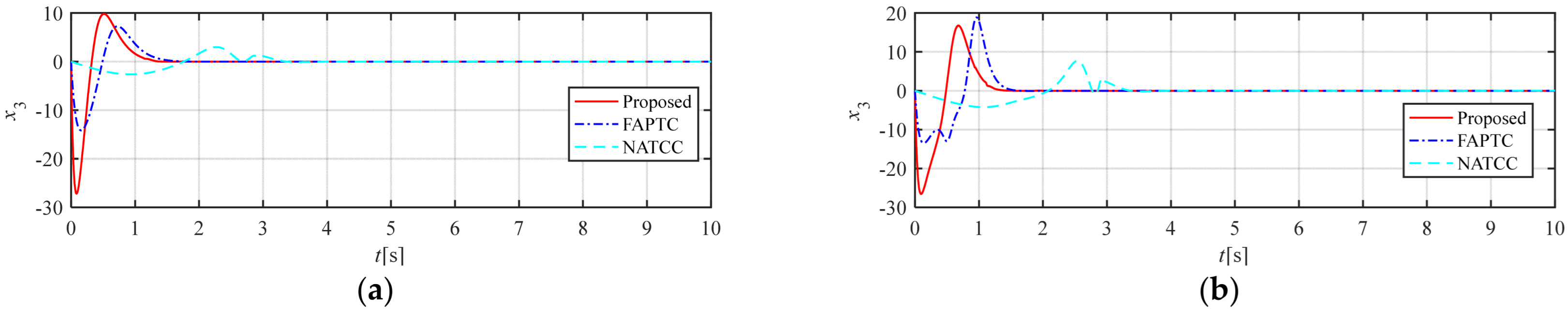
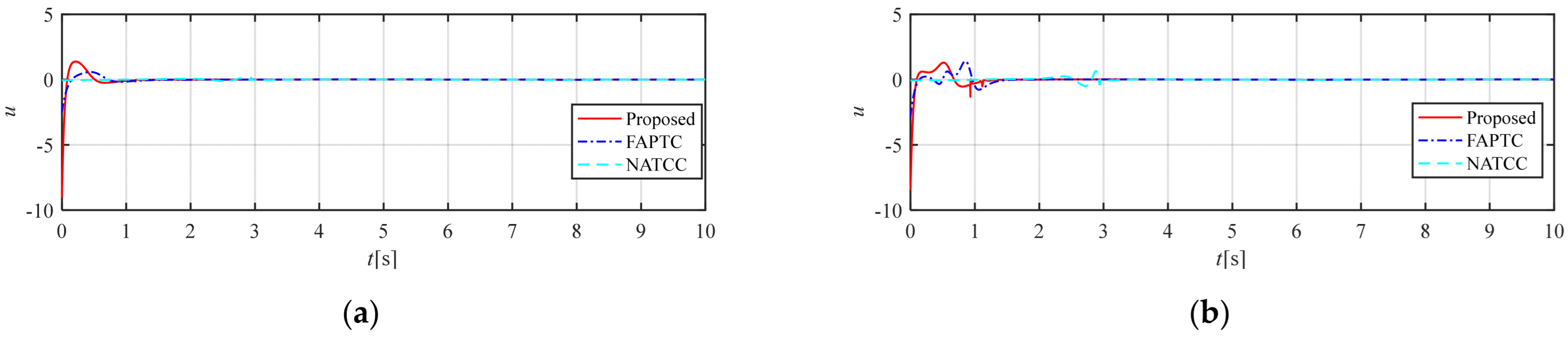
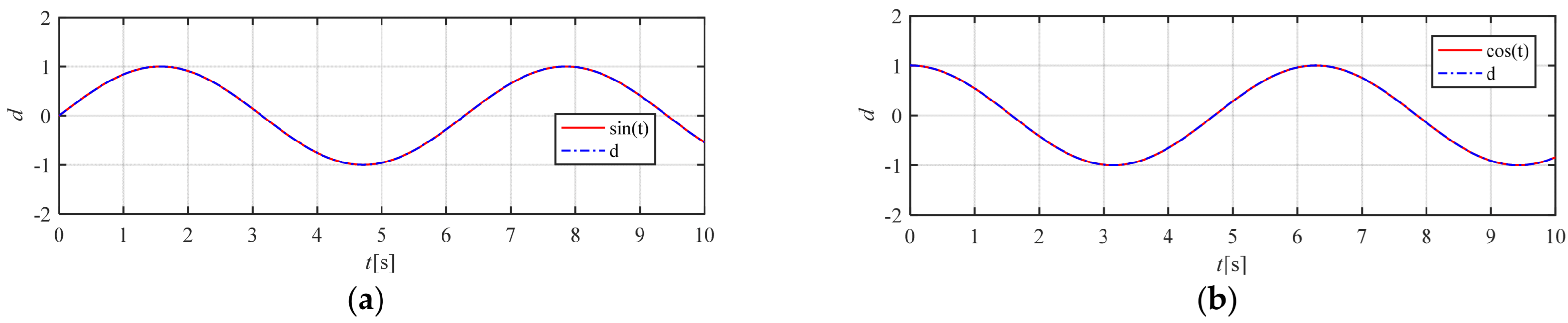
4.1. Simulation of the Proposed Control Scheme on the Third-Order Integral Chain System
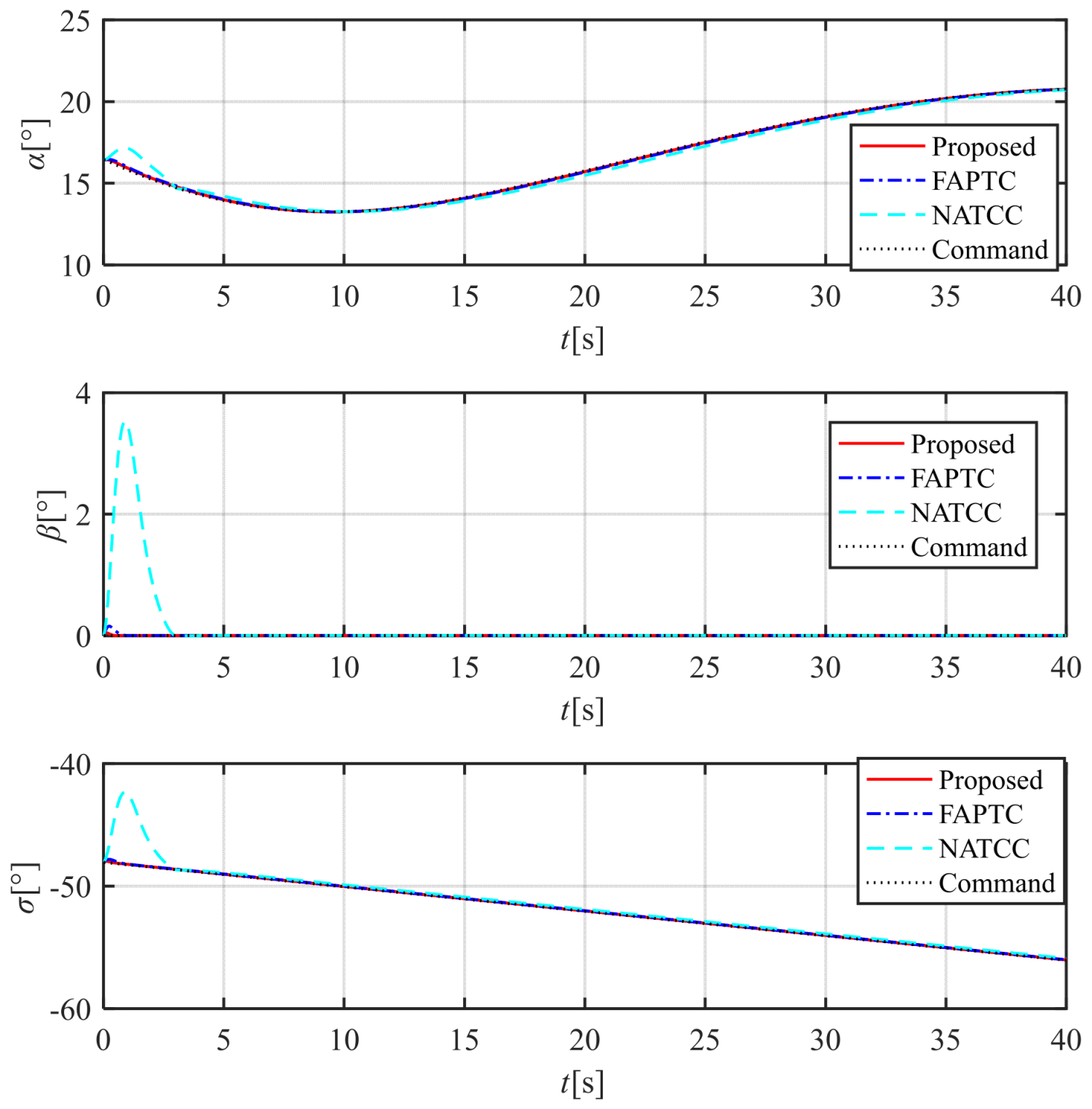
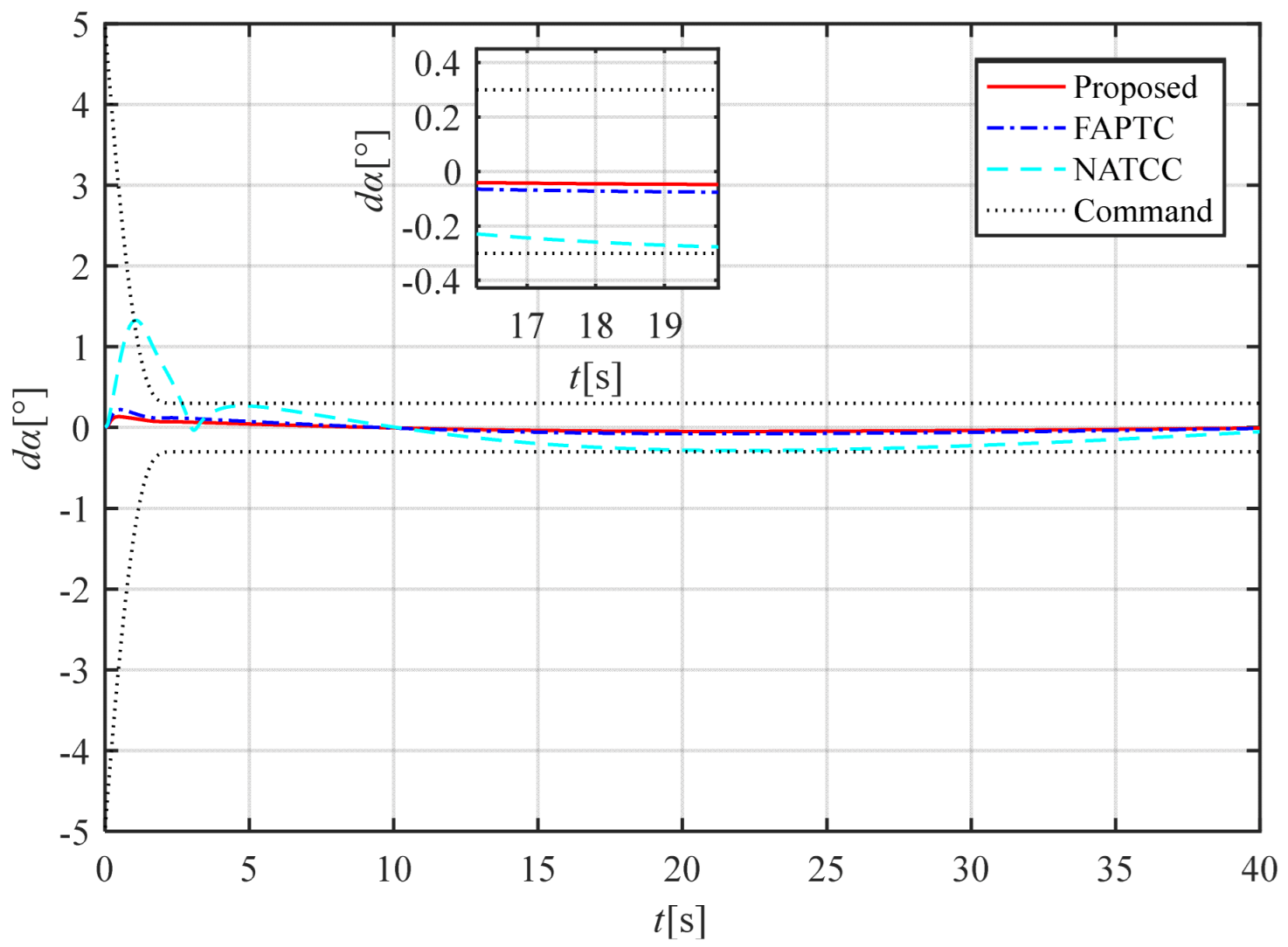
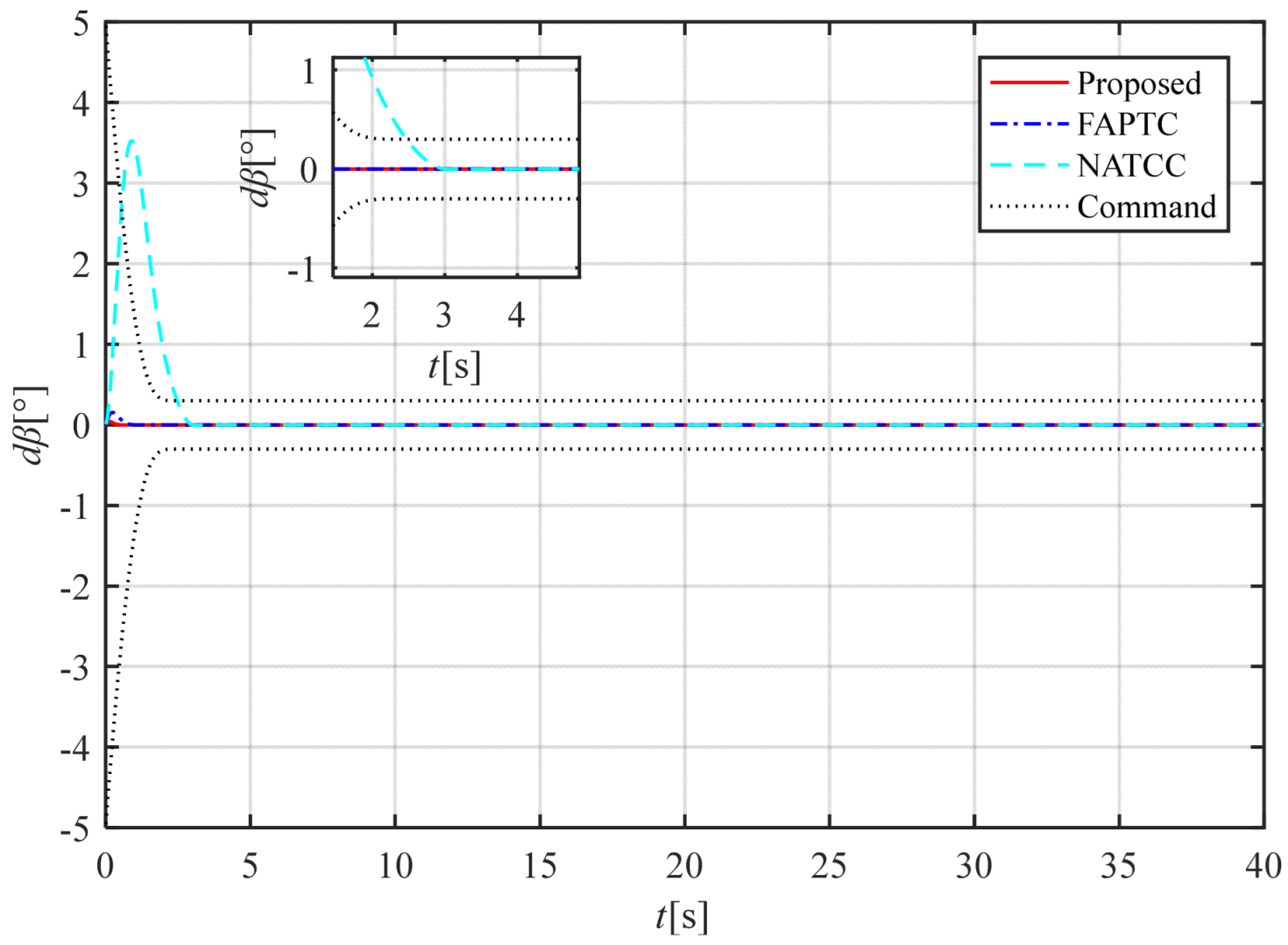
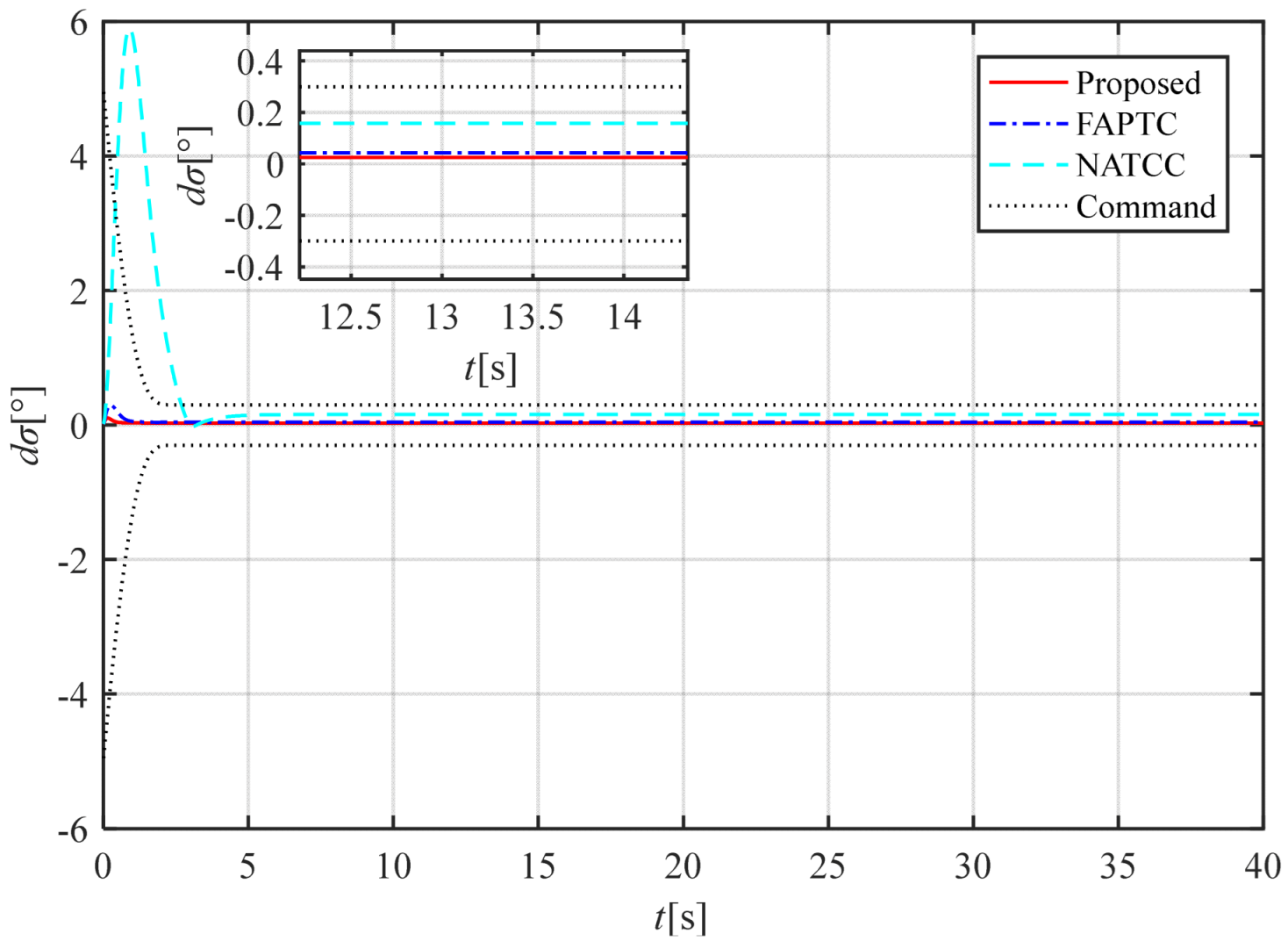
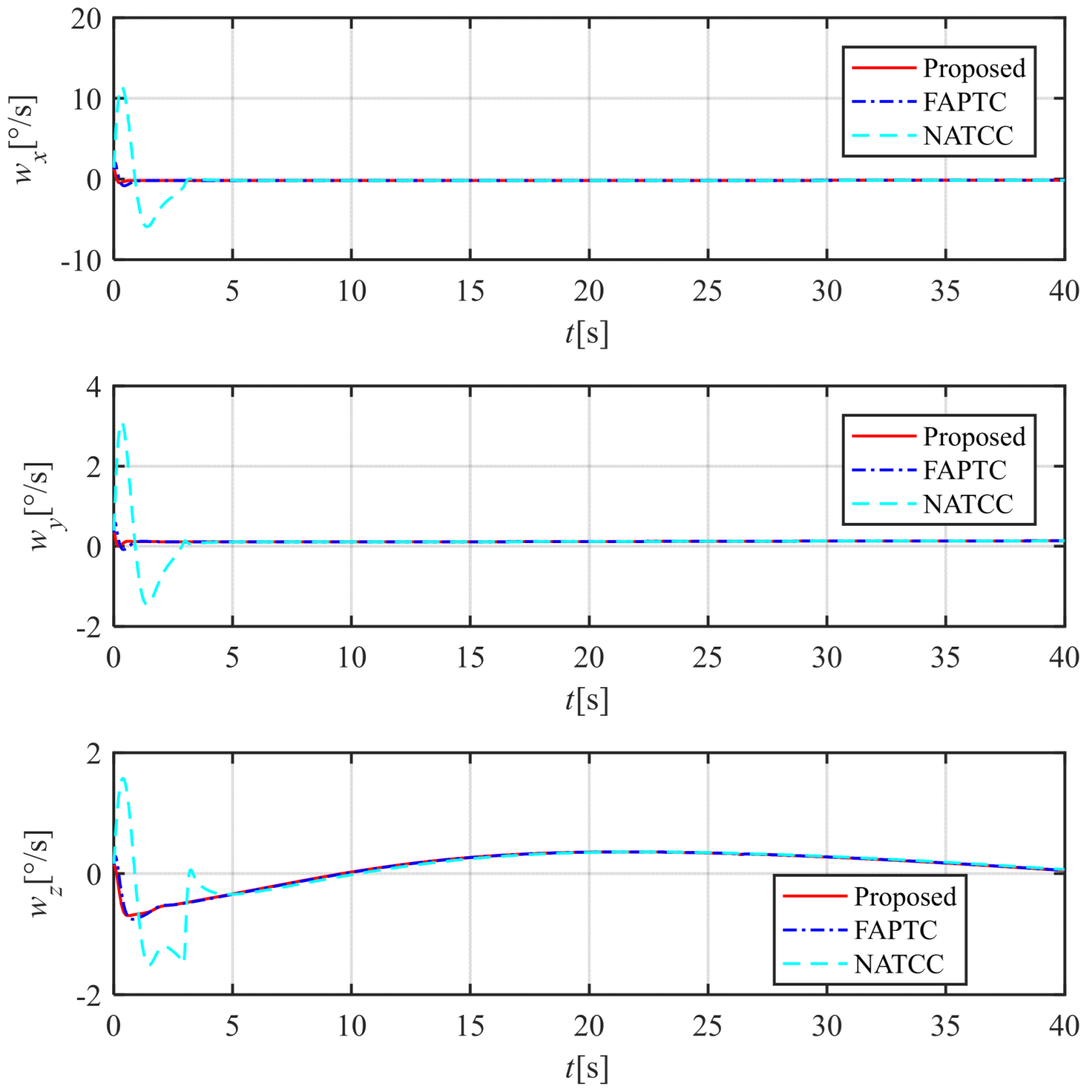
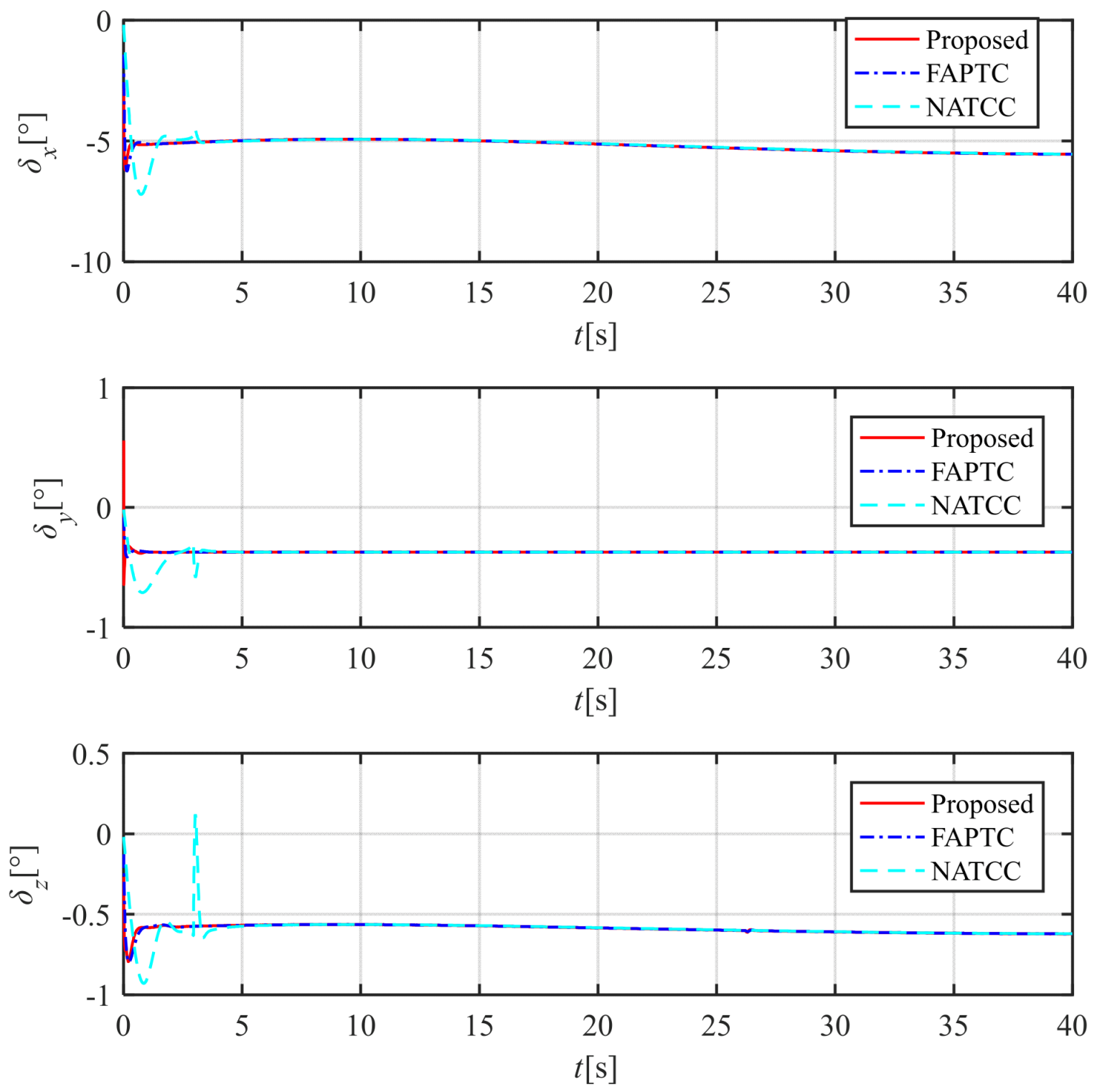
4.2. Simulation of the Proposed Control Scheme on the Aerospace Aircraft
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Mueller, G.E.; Lepore, D.F. The K-1 reusable aerospace vehicle: Managing to achieve low cost. Acta Astronaut. 2000, 46, 199–202. [Google Scholar] [CrossRef]
- McHenry, R.L.; Long, A.D.; Cockrell, B.F.; Thibodeau, J.R., III; Brand, T.J. Space shuttle ascent guidance navigation and control. J. Astronaut. Sci. 1979, 27, 1–38. [Google Scholar]
- Paez, C. The development of the X-37 re-entry vehicle. In Proceedings of the 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Fort Lauderdale, FL, USA, 11–14 July 2004; p. 4186. [Google Scholar]
- Chu, L.; Li, Q.; Gu, F.; Du, X.; He, Y.; Deng, Y. Design, modeling, and control of morphing aircraft: A review. Chin. J. Aeronaut. 2021, 35, 220–246. [Google Scholar] [CrossRef]
- Zhao, K.; Song, J.; Ai, S.; Xu, X.; Liu, Y. Active Fault-Tolerant Control for Near-Space Hypersonic Vehicles. Aerospace 2022, 9, 237. [Google Scholar] [CrossRef]
- Wang, X.; Xu, B. Robust Adaptive Control of Hypersonic Flight Vehicle With Aero-Servo-Elastic Effect. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 1955–1964. [Google Scholar] [CrossRef]
- Qian, C.; Lin, W. Recursive Observer Design, Homogeneous Approximation, and Nonsmooth Output Feedback Stabilization of Nonlinear Systems. IEEE Trans. Autom. Control. 2006, 51, 1457–1471. [Google Scholar] [CrossRef]
- Kayacan, E. Sliding mode control for systems with mismatched time-varying uncertainties via a self-learning disturbance observer. Trans. Inst. Meas. Control. 2018, 41, 2039–2052. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Yu, J.; Liu, J. Adaptive Neural Network-Based Finite-Time Impedance Control of Constrained Robotic Manipulators With Disturbance Observer. IEEE Trans. Circuits Syst. II: Express Briefs 2022, 69, 1412–1416. [Google Scholar] [CrossRef]
- Hu, Q.; Jiang, B. Continuous Finite-Time Attitude Control for Rigid Spacecraft Based on Angular Velocity Observer. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1082–1092. [Google Scholar] [CrossRef]
- Park, J.; Bang, H.; Park, K.; Lee, S. Cascade nonlinear observer design for large amplitude of slosh variables in spacecraft maneuver with liquid propellant tank. Acta Astronaut. 2023, 213, 35–48. [Google Scholar] [CrossRef]
- Bai, Y.; Wang, X.; Xu, J.; Cui, N. Adaptive quaternion tracking with nonlinear extended state observer. Acta Astronaut. 2017, 139, 494–501. [Google Scholar] [CrossRef]
- Song, Y.; Chen, X.; Yin, Z.; Liao, Y.; Wei, C. Robust attitude coordinated control for gravi-tational-wave detection spacecraft formation with large-scale communication delays. Acta Astronaut. 2024, 221, 34–45. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, M.; Yang, X.; Song, S. Dis-turbance-observer-based fixed-time control for 6-DOF spacecraft rendezvous and docking operations under full-state constraints. Acta Astronaut. 2023, 205, 225–238. [Google Scholar] [CrossRef]
- Chen, J.; Chen, Z.; Zhang, H.; Xiao, B.; Cao, L. Predefined-Time Observer-Based Nonsingular Sliding-Mode Control for Spacecraft Attitude Stabili-zation. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 1291–1295. [Google Scholar]
- Xie, S.; Chen, Q. Predefined-Time Disturb-ance Estimation and Attitude Control for Rigid Space-craft. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 2089–2093. [Google Scholar]
- Eliker, K.; Zhang, W.D. Finite-time adaptive integral backstepping fast terminal sliding mode control application on quadrotor UAV. Int. J. Control. Autom. Syst. 2020, 18, 415–430. [Google Scholar] [CrossRef]
- Wang, J.; Zong, Q.; Su, R.; Tian, B.L. Continuous high order sliding mode controller design for a flexible air-breathing hypersonic vehicle. ISA Trans. 2014, 53, 690–698. [Google Scholar] [CrossRef]
- Zhang, L.; Wei, C.Z.; Wu, R.; Cui, N.G. Fixed-time extended state observer based non-singular fast terminal sliding mode control for a VTVL reusable launch vehicle. Aerosp. Sci. Technol. 2018, 82, 70–79. [Google Scholar] [CrossRef]
- You, M.; Zong, Q.; Tian, B.L.; Zhao, X.Y.; Zeng, F.L. Comprehensive design of uniform robust exact disturbance observer and fixed-time controller for reusable launch vehicles. Iet Control. Theory Appl. 2018, 12, 638–648. [Google Scholar] [CrossRef]
- Sánchez-Torres, J.D.; Sanchez, E.N.; Loukianov, A.G. Predefined-time stability of dynamical systems with sliding modes. In Proceedings of the American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 5842–5846. [Google Scholar]
- Ju, X.Z.; Wei, C.Z.; Xu, H.C.; Wang, F. Fractional-order sliding mode control with a predefined-time observer for VTVL reusable launch vehicles under actuator faults and saturation constraints. ISA Trans. 2022, 129, 55–72. [Google Scholar] [CrossRef]
- Su, Y.; Shen, S. Adaptive predefined-time fault-tolerant attitude tracking control for rigid space-craft with guaranteed performance. Acta Astronaut. 2023, 214, 677–688. [Google Scholar] [CrossRef]
- Becerra, H.M.; Vázquez, C.R.; Arechavaleta, G.; Delfin, J. Predefined-Time Convergence Control for High-Order Integrator Systems Using Time Base Generators. IEEE Trans. Control. Syst. Technol. 2018, 26, 1866–1873. [Google Scholar] [CrossRef]
- Guo, C.; Hu, J. Time Base Generator-Based Practical Predefined-Time Stabilization of High-Order Systems With Unknown Disturbance. IEEE Transac-Tions Circuits Syst. II Express Briefs. 2023, 70, 2670–2674. [Google Scholar] [CrossRef]
- Ning, B.; Han, Q.; Zuo, Z. Bipartite Consen-sus Tracking for Second-Order Multiagent Systems: A Time-Varying Function-Based Preset-Time Approach. IEEE Trans. Autom. Control. 2020, 66, 2739–2745. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Jing, Y.; Zhang, Z. A Novel Finite-Time Adaptive Fuzzy Tracking Control Scheme for Nonstrict Feedback Systems. IEEE Trans. Fuzzy Syst. 2019, 27, 646–658. [Google Scholar] [CrossRef]
- Li, J.; Du, J. Predefined-time tracking control of a class of nonlinear systems via a novel C∞ performance function. Int. J. Robust. Nonlinear Control. 2024, 34, 3586–3601. [Google Scholar] [CrossRef]
- Sánchez-Torres, J.D.; Sánchez-Torres, J.D.; Gómez–Gutiérrez, D.; López, E.; Loukianov, A.G. A class of predefined-time stable dynamical systems. Ima J. Math. Control. Inf. 2018, 35, 1–29. [Google Scholar] [CrossRef]
- Jia, C.; Liu, X.; Xu, J. Predefined-Time Nonsingular Sliding Mode Control and Its Application to Nonlinear Systems. IEEE Trans. Ind. Inform. 2024, 20, 5829–5837. [Google Scholar] [CrossRef]
- Zhang, M.; Zang, H.; Bai, L. A New Predefined-Time Sliding Mode Control Scheme for Synchronizing Chaotic Systems. SSRN Electron. J. 2022, 164, 112745. [Google Scholar]
- Zuo, Z.; Tie, L. Distributed robust finite-time nonlinear consensus protocols for multi-agent systems. Int. J. Syst. Sci. 2014, 47, 1366–1375. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Jing, Y. Adaptive neural networks finite-time tracking control for non-strict feedback systems via prescribed performance. Inf. Sci. 2018, 468, 29–46. [Google Scholar] [CrossRef]
- Wei, C.; Gui, M.; Zhang, C.; Liao, Y.; Dai, M.; Luo, B. Adaptive Appointed-Time Consensus Control of Networked Euler–Lagrange Systems With Connectivity Preservation. IEEE Trans. Cybern. 2021, 52, 12379–12392. [Google Scholar] [CrossRef] [PubMed]
- Pal, A.K.; Kamal, S.; Nagar, S.K.; Bandyopadhyay, B.; Fridman, L.M. Design of controllers with arbitrary convergence time. Automatica 2020, 112, 108710. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.2 | 1 | ||
| 2 | 1 | ||
| 1 | 1 | ||
| 5 | 0.1 | ||
| 3 | 0.38 | ||
| 1 | 1 | ||
| 1 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 5000.0 | 2.0 | ||
| 6.0 | 10,000.0 | ||
| 3000.0 | 13,000.0 | ||
| 8000.0 | 0.0033 | ||
| 0.036 | 0.045 | ||
| 0.004 | 0.0032 | ||
| 0.036 | 0.4 | ||
| 0.41 | 0.45 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.2 | 1 | ||
| 2 | 1 | ||
| 1 | 1 | ||
| 3 | 0.2 | ||
| 1 | 1 | ||
| 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, W.; Shi, X.; Wei, C. Adaptive Global Predefined-Time Control Method of Aerospace Aircraft. Aerospace 2025, 12, 580. https://doi.org/10.3390/aerospace12070580
Ding W, Shi X, Wei C. Adaptive Global Predefined-Time Control Method of Aerospace Aircraft. Aerospace. 2025; 12(7):580. https://doi.org/10.3390/aerospace12070580
Chicago/Turabian StyleDing, Wenhao, Xiaoping Shi, and Changzhu Wei. 2025. "Adaptive Global Predefined-Time Control Method of Aerospace Aircraft" Aerospace 12, no. 7: 580. https://doi.org/10.3390/aerospace12070580
APA StyleDing, W., Shi, X., & Wei, C. (2025). Adaptive Global Predefined-Time Control Method of Aerospace Aircraft. Aerospace, 12(7), 580. https://doi.org/10.3390/aerospace12070580