Abstract
The integration of communication channels with the feedback loop in a networked control system (NCS) is attractive for many applications. A major challenge in the NCS is to reduce transmissions over the network between the sensors, the controller, and the actuators to avoid network congestion. An efficient approach to achieving this goal is the event-triggered implementation where the control actions are only updated when necessary from stability/performance perspectives. In particular, periodic event-triggered control (PETC) has garnered recent attention because of its practical implementation advantages. This paper focuses on the design of stabilizing PETC for linear time-invariant systems. It is assumed that the plant state is partially known; the feedback signal is sent to the controller at discrete-time instants via a digital channel; and an event-triggered controller is synthesized, solely based on the available plant measurement. The constructed event-triggering law is novel and only verified at periodic time instants; it is more adapted to practical implementations. The proposed approach ensures a global asymptotic stability property for the closed-loop system under mild conditions. The overall model is developed as a hybrid dynamical system to truly describe the mixed continuous-time and discrete-time dynamics. The stability is studied using appropriate Lyapunov functions. The efficiency of the technique is illustrated in the dynamic model of the tunnel diode system.
1. Introduction
A networked control system (NCS) is a feedback control system that uses communication networks to carry out data transmission between the sensors, the controller, and the actuators [1]. Due to its numerous benefits, it has been adopted in various domains of applications, such as sensor networks [2], cyber-physical systems [3], multi-agent systems [4], and distributed control systems [5]. However, the reliability of an NCS is still a main challenge compared to a conventional point-to-point connection. The past few decades have seen extensive research on NCSs driven by their inherent challenges. In a conventional digital control system over NCS, the feedback information is sampled, and computed control inputs are then applied to actuators. Traditionally, the sampling instants and execution of control updates are implemented in a periodic time-triggered manner. One drawback of this approach is that periodic controllers can provide unnecessary inputs even when performance is good, which leads to wasteful energy use and actuator wear. Moreover, the design of the periodic sampling period is often conservative and based on the worst-case scenario. Hence, the implantation of such a method in the NCS can result in overloaded and congested traffic over the network. As a result, there will be more frequent packet failures and longer communication delays, which adversely affect the system performance or network reliability. Alternatively, to overcome these limitations, the event-triggered control technique has been proposed in the literature.
Event-triggered control (ETC) is an implementation technique where the transmission instants of the feedback measurements are generated by a state-dependent rule instead of the traditional periodic sampling approach. This allows for more efficient utilization of the limited bandwidth of the shared communication channel. This idea has attracted a great deal of research attention due to its appealing potential in reducing the communication loads among the different components of the system while maintaining satisfactory performance of the closed-loop system. In this context, the ETC has been widely investigated with different control techniques, such as the PID control [6,7,8], state-feedback [9,10], output-based control [11,12,13,14], model-free control [15,16,17], and the consensus of multi-agent systems [18,19,20]. Many developed ETC approaches rely on the continuous verification of the triggering condition to determine the subsequent transmission time; see [21,22,23,24]. However, a major challenge in this type of continuous ETC is to prevent the accumulation of transmission instants, such as the Zeno phenomenon [25]. Alternatively, periodic event-triggered control (PETC) has been proposed, such that the triggering rule is only checked at periodic time instants; it is more adapted to practical implementations and automatically rules out Zeno behavior [13,26,27,28,29,30,31,32].
In this study, we address the issue of output feedback linear time-invariant (LTI) systems under the framework of periodic event-triggered control. It is assumed that only an output of the plant is known and an appropriate periodic ETC is constructed to decide whether to release the transmission at the next periodic instant. The proposed periodic ETC is novel and equipped with a dynamic variable, i.e., dynamic periodic ETC, to further reduce the amount of transmissions. Moreover, the periodic sampling interval is designed based on the approach of [33] to derive the maximally allowable transmission interval (MATI) for the case of time-triggered control. The proposed approach is designed by emulation where we first ignore the effect of the network and stabilize the plant in continuous-time. Then, the sampling due to the network is taken into account, and a periodic ETC mechanism is constructed, such that the closed-loop stability is preserved. The overall system is formulated as a hybrid dynamical system to truly describe the mixed continuous-time and discrete-time dynamics of the system. Sufficient conditions are provided in terms of the linear matrix inequality (LMI) to properly identify the parameters of the event-triggering mechanism in a systematic manner. The stability is investigated by using appropriate Lyapunov functions. The effectiveness of the approach is demonstrated via its application to the tunnel diode circuit system.
The rest of the paper is organized as follows. We present related works in Section 2. Preliminaries are presented in Section 3. The problem is formally stated in Section 4. The hybrid model is presented in Section 5. The main results are presented in Section 6. The application of the technique to the tunnel diode system is presented in Section 7. Conclusions are provided in Section 9.
2. Related Work
The problem of PETC synthesis has been studied in several works; see [29,34,35,36,37,38]. In [34], the PETC problem has been studied for linear systems whose plant dynamics are continuous while the controller dynamics are discrete. In addition, the proposed PETC in [34] considered the effect of quantization as well as sampling in an asynchronous fashion. The PETC technique of [35] has been developed to stabilize linear systems in the presence of sampling and quantization. The idea of this approach is based on constructing abstract models by dividing the state space into finite regions and analyzing the PETC behavior in each region. Similar to [34], the plant is described in continuous-time while the controller is given in discrete-time form. The authors of [36] consider the problem of dynamic PETC for nonlinear multi-agent systems using state feedback control. The approach is developed for both directed and undirected graph topologies under different connection assumptions. Then, the stability is carried out in the framework of hybrid dynamics. In [37], PETC is proposed to stabilize linear systems based on the emulation approach by exploiting model-based computations. The analysis is conducted in two frameworks based on perturbed linear and piecewise linear systems, which lead to different stability guarantees. The authors of [29] construe the PETC mechanism for nonlinear systems, assuming that the controller transmits the control updates to the actuators over multiple decoupled networks. To that end, asynchronous PETC conditions have been developed, such that transmissions over each network are determined by the local triggering rule. Although the considered setup in [29] is quite general, the proposed PETC in [29] is based on the static triggering rule, which may not provide optimal performance in terms of reduced transmissions. Similarly, the PETC approach recently proposed in [38] is designed to stabilize output feedback linear systems based on a static triggering threshold.
We note that the majority of existing works on PETC are adapted to the state feedback control case or based on static triggering rules. The proposed approach in this paper is adapted to the output feedback control case while the PETC relies on internal dynamic variables to allow for a further reduction in transmissions. Moreover, the setup that we consider, the proposed PETC mechanism, the hybrid model, and the obtained stability property are different from previously mentioned works, as explained in Table 1.

Table 1.
Novelty of the proposed approach w.r.t. existing results.
Table 1 illustrates the main contributions of the developed ETC approaches compared to the relevant results, consisting of the following main points:
- We construct a novel PETC for linear systems based on available output measurements rather than the full state, as in [36].
- The sampling period is designed as the maximally allowable transmission interval to provide a joint design for both the sampling period and the PETC mechanism, which is not the case in [34,35,38].
- The closed-loop system is modeled as a hybrid dynamical system, which truly describes the existing mixed dynamics, in contrast to [34,35,36,37].
- The PETC mechanism is based on a dynamic internal variable, further saving the communication network compared to the static PETC, as in [29,34,35,37,38].
3. Preliminaries
Let , , and . A continuous function is of class if it is zero, at zero, and strictly increasing. It is of class if, in addition, as . A continuous function is of class if for each fixed , is of class , and is non-increasing and satisfies, for each fixed , . A function is locally Lipschitz-continuous if, for each , there exists a neighborhood and a constant , such that for all . Given a locally Lipschitz function , denotes the Clarke generalized gradient at , given by . We denote the minimum and maximum eigenvalues of the real symmetric matrix A as and , respectively. We write to denote the transpose of A, and stands for the identity matrix of dimension n. The symbol ★ stands for symmetric blocks. We write to represent the vector for and . For a vector , we denote by its Euclidean norm, and for a matrix , . Given a set and a vector , the distance of x to is defined as .
We consider hybrid systems of the following form [39,40]
where is the state, is the flow set, F is the flow map, is the jump set, and G is the jump map. Solutions to system (1) are defined on hybrid time domains. We call a subset a compact hybrid time domain if for some finite sequences of times and it is a hybrid time domain if for all is a compact hybrid time domain. A hybrid signal is a function defined on a hybrid time domain. For all details of solutions and the definition of maximality, we refer the reader to [39,40].
4. Problem Formulation
We consider plant models with the following dynamics:
where is the plant state, is the control input, is the measured output, and are matrices of appropriate dimensions. The plant is stabilized by the following dynamic controller:
where is the controller state, is the last transmitted value of y, and are matrices of appropriate dimensions. The feedback law (3) is designed by emulation; that is, we first stabilize the plant (2) in continuous time, assuming perfect communication, i.e., . Then, we take into account the sampling effects.
The implementation scenario is shown in Figure 1. We consider the case where the controller is co-located with the plant while the sensors and the controller communicate over a shared network. We assume that the plant state is not available for measurements and only an output can be transmitted to the controller. In particular, we consider that the output is sampled at periodic sampling times . Then, an event-triggering mechanism is employed to decide whether to submit the output value , where the time instants at which is released are denoted by , leading to the so-called periodic event-triggered control (PETC), and we refer by the most recent value of at the controller at time ; see Figure 1. Hence, if we define
where and denote the increasing sequences of periodic time instants and transmission instants, respectively. Then, it holds that .
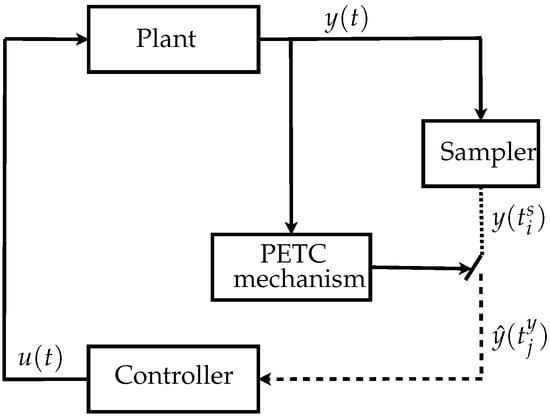
Figure 1.
Periodic event-triggered output feedback control; (solid line) continuous-time; (dotted line) periodic instants; (dash line) event-triggered instants.
It is important to mention that the periodic event-triggering mechanism is assumed to have access to both the actual output value, i.e., , and the last transmitted value, .
The objectives of this paper include
- The synthesis of the periodic sampling interval and periodic event-triggered controller by emulation;
- Derivation of the hybrid dynamical model of the overall system;
- Sufficient conditions to ensure the closed-loop stability;
- Preventing the occurrence of Zeno behavior.
5. Hybrid Model
In this section, we derive the dynamic behavior of the closed-loop system and formulate it as a hybrid dynamical system. We define the sampling error and the network-induced error between two transmission times as follows, for all
Between two periodic sampling times , the sampled output is kept constant using ZOH. At each periodic sampling time, , the value of is reset to . Moreover, between two transmission instants, , the last transmitted value of the output is kept constant using ZOH, and at each transmission instant, , is reset to .
We define the total error as the difference between the last transmitted value of the output and the current output measurement :
Then, it holds that
The last property implies that the total error is reset to zero at each transmission instant since is updated to at each .
We define two auxiliary time variables , as follows:
and
The time variable will be used to describe the time between two periodic sampling instants, , and it is reset to zero at each periodic instance, . Similarly, the time variable will be used to track the time between two transmission instants and it is reset to zero at each transmission instance . These two time variables, and , will be helpful in constructing the hybrid dynamical model of the system, as explained in the sequel.
In order to complete the description of the overall system, we outline below the general structure of the proposed periodic event-triggering mechanism, which will be clearly developed in the next section. We synthesize a PETC based on a dynamic variable , which has the following dynamics; see [41,42,43],
where functions , and will be specified in Section 6. Note that functions , and only depend on the locally available information at the event-triggering mechanism. The transmission instants are generated by the following mechanism:
where .
Let be the concatenation of the state variables, with . Then, we obtain the hybrid dynamical system:
where the flow set and the jump are defined as
where is the periodic sampling interval to be designed. We also define the jump set to identify the transmission instants as follows:
The system flows on when , i.e., between two periodic instants; otherwise, the system experiences a jump. The jump map in (20) can be interpreted as follows. When , only variables and are updated but no transmission is generated. When , implying that the triggering condition is violated, variables are updated.
Remark 1.
The hybrid dynamical model is built on the following boundary conditions:
- The plant model (2) is linear time-invariant.
- The plant model is controllable and observable.
- The communication network is noiseless and delay-free.
- The sampling-induced error is reset to zero at each triggering instant .
- The control input is kept constant between two transmissions by ZOH.
- The plant state and the observer state do not change at transmissions.
6. Main Results
We present here the main results. First, we state the following lemma on system (15).
Lemma 1.
Consider system (15). If there exist , and a positive definite symmetric real matrix P, such that
where , then the Lyapunov function candidate satisfies, for all and almost all
Proof of Lemma 1
Let . Consequently, it holds that, for all and almost all ,
By post- and pre-multiplying LMIs (21), respectively, by the state vector , and its transpose, we obtain
which implies
and the conclusion of Lemma 1 holds. □
Lemma 1 establishes an -gain stability property for the system from to ; see [9,33,42].
6.1. Event-Triggering Mechanism
We define , then in view of (15), it holds that for all and almost all
where .
The dynamics of the triggering function in (12) are defined by functions , , and , which are given by
where , , with for any and , and the constant comes from Lemma 1. The sampling period T is designed as the maximally allowable transmission interval (MATI) of time-triggered systems [33], which leads to
with . Note that when in (28), we recover the MATI bound of time-triggered controllers in [33]. By designing the sampling period T as the MATI bound, we opt to further reduce the amount of transmissions by using the PETC mechanism.
Remark 2.
It is important to note that in view of (27), we have that . Moreover, is reset to when and are reset to , which is strictly positive when . Consequently, by using the comparison principle, it holds that for all . This property is crucial for establishing the stability of the closed-loop system, as will be shown later.
6.2. Stability Results
We obtain the following results.
Theorem 1.
Proof of Theorem 1.
Let be the solution to the differential system
where with and for any , and the constant comes from Lemma 1. The time constant T is the time it takes for to decrease from to with and . This time is given by (28), which can be derived by following similar lines, as in [33].
We define for all
where for all with P comes from Lemma 1. Note that, in view of (30), for all . Hence, since for all , as explained in Remark 2, we deduce that R is positive-definite and radially unbounded and, thus, R can be used as a Lyapunov function candidate to investigate the behavior of the hybrid system (15). We study the dynamics of R during jumps and flows.
Dynamics of R during flows
By using the fact that and since in view of (27), we have that for all and
By using the fact that , it holds that, for all
where .
Dynamics of R at jumps
In view of the jump map in (20), we distinguish three different situations.
As a result, we deduce that, for all , the relation is valid. Then, the property holds for all .
Consequently, in view of (33) and (35), by using similar arguments as in the end of the proof of Theorem 1 in [33], we deduce that the closed-loop system is globally asymptotically stable, and the conclusion of Theorem 1 holds. □
Theorem 1 implies that the closed-loop system (15) is globally asymptotically stable under the proposed PETC.
Remark 3.
It is clear from the proposed PETM (13) that there exists a trade-off between the periodic sampling interval T and the generated amount of transmissions. That is, when the value of T is enlarged, the generated number of transmissions will be increased and vice versa. This trade-off can be adjusted by the user to satisfy the desirable performance of the PETC.
7. Event-Triggered Control of the Tunnel Diode System
To illustrate the benefit of the approach, the technique is applied to the tunnel’s diode circuit system; see Figure 2.
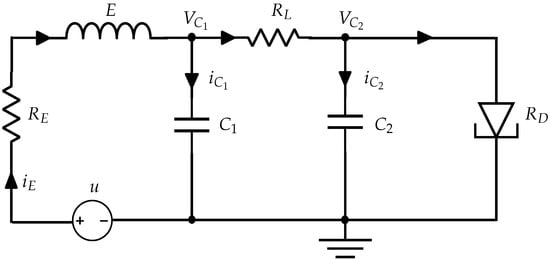
Figure 2.
Schematic of the tunnel diode circuit.
The dynamic model of this system is given by
where are linear resistors, are capacitors, E is an inductor, denotes the impedance of the diode, and is a known scalar. Moreover, are the corresponding voltages at the capacitors , respectively, is the current through the resistance, , and is the control input voltage. The above model can be rewritten in the state space form:
with
where with , and . The output implies that the capacitor voltages can be measured while the inductor current is not available for feedback. The parameter values in matrices A and B are given in Table 2 below.
Table 2.
Parameters of the tunnel diode circuit [44].
The hybrid model (15) is developed, as described in Section 5. By checking the required conditions of Lemma 1 using the MATLAB environment with the YALMIP toolbox and SeDuMi solver [45], the LMI condition (21) is feasible with the following values: , , . By setting , , and , and substituting in (28), we obtain and . Finally, by picking , all parameters of the PETM (27) are set.
The approach is examined on a MATLAB simulation with the initial conditions , , , , , using the MATLAB toolbox HyEQ [46] for hybrid dynamical systems. By running the simulation for 20 seconds, the obtained minimum and average inter-transmission times are and , respectively. As expected, the minimum inter-transmission time is typically equal to the periodic sampling interval T, however, the average inter-transmission time is larger than T, which supports our analysis and justifies the benefit of the approach compared to periodic sampling. The closed-loop response is shown in Figure 3, Figure 4, Figure 5, Figure 6, Figure 7, Figure 8, Figure 9, Figure 10, Figure 11 and Figure 12.
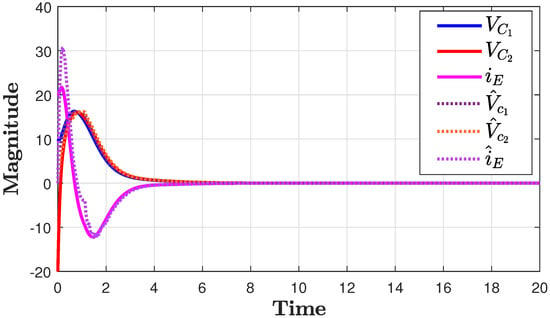
Figure 3.
State trajectories of the plant and the controller.
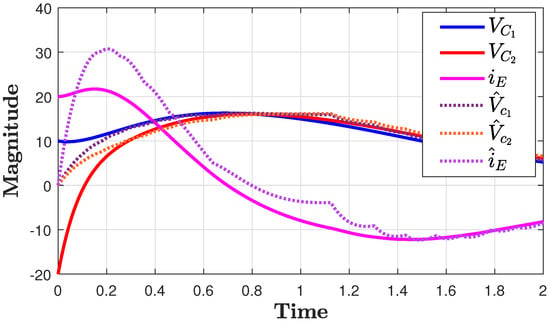
Figure 4.
State trajectories of the plant and the controller for the first two seconds.
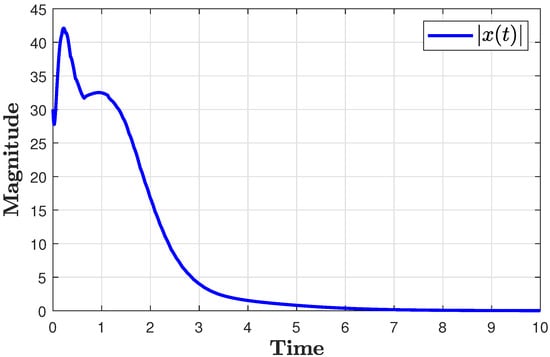
Figure 5.
Norm of the plant state.
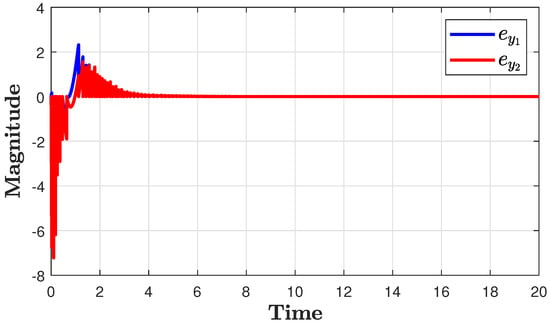
Figure 6.
Sampling-induced errors.
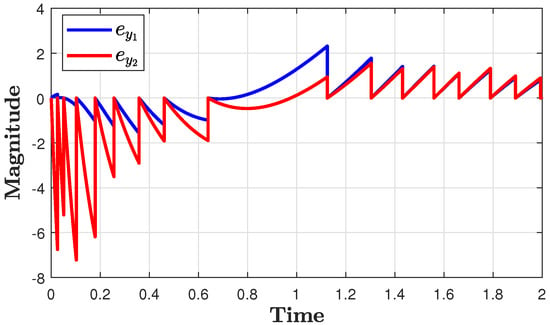
Figure 7.
Sampling-induced errors for the first two seconds.
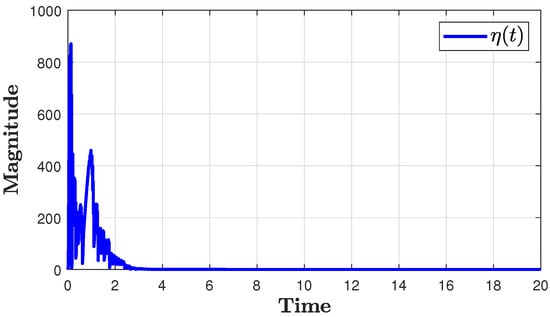
Figure 8.
Evolution of for the first 2 s.
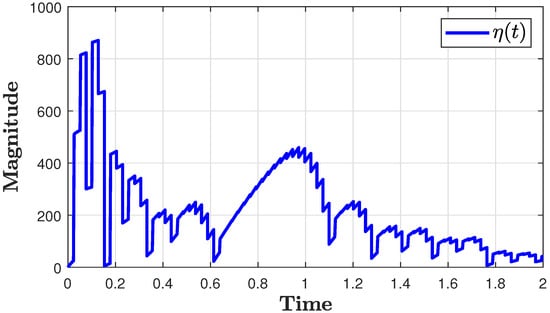
Figure 9.
Evolution of for the first 2 s.
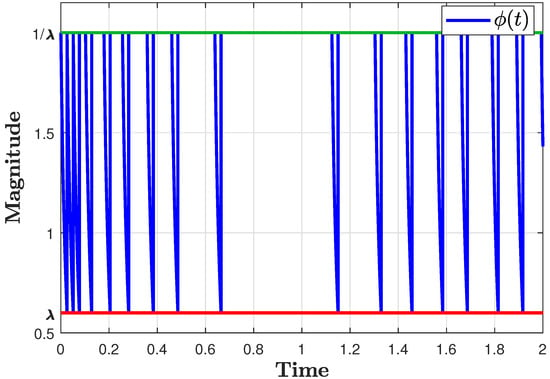
Figure 10.
Evolution of for the first 2 s.
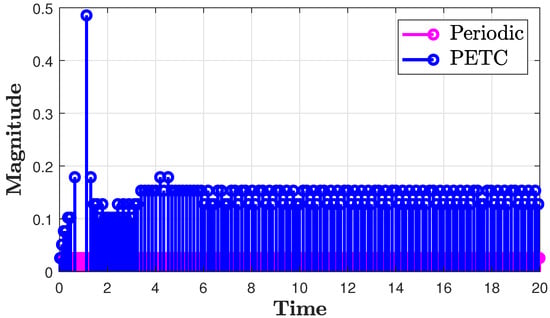
Figure 11.
Periodic and transmission instants.
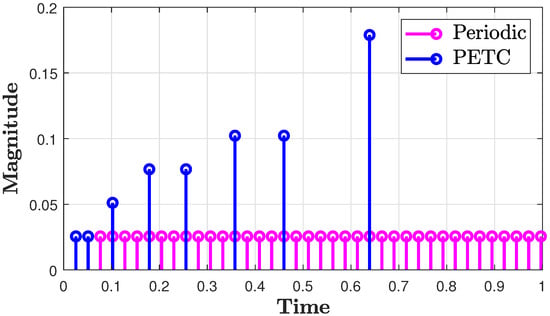
Figure 12.
Periodic and transmission instants for the first 1 s.
Figure 3 shows that the plant and the controller states converge asymptotically to the origin as expected. A zoom-in of the first two seconds is illustrated in Figure 4, which shows that the observer successfully captures the plant state in a short time.
Figure 5 shows the norm of the plant state converging to the origin, affirming the asymptotic stability property as stated by the result in Theorem 1.
Figure 6 shows the evolution of the sampling-induced-errors , which are reset to zero at each transmission instant, as explained. A zoom-in of the first 2 s is presented in Figure 7 to clarify this behavior.
Figure 8 and Figure 9 show the trajectory of with a zoom-in of the first two seconds, where we note that , as stated in Remark 2.
The trajectory of the dynamic variable is shown in Figure 10 for the first 2 s. It is clear that is strictly positive and decreases from to , as discussed after (30).
The periodic time instants and the transmission instants are shown in Figure 11. We note that the transmission instants generated by the PETC are much less than the periodic sampling instants, which support the effectiveness of the proposed approach.
A zoom-in of the first 1 s for the periodic and transmission instants is shown in Figure 12 to highlight the fact that the event-triggering condition is only verified at periodic sampling instants and not in continuous-time. Note that this example has been implemented in [44] under the assumption of state feedback control, i.e., . For the sake of comparison, we repeat the simulation with this case, and the obtained inter-transmission times are shown in Figure 13 below. From Figure 11 and Figure 13, it can be seen that the triggering instant case is much less than the output feedback control case, which implies that the output feedback control case requires more control actions as compensation due to the lack of full state information. From Figure 13, we can see that only the first triggering instant is generated with the time-triggering rule, as opposed to [44], while all the remaining instants are larger than T, which justifies the efficiency of the proposed approach.
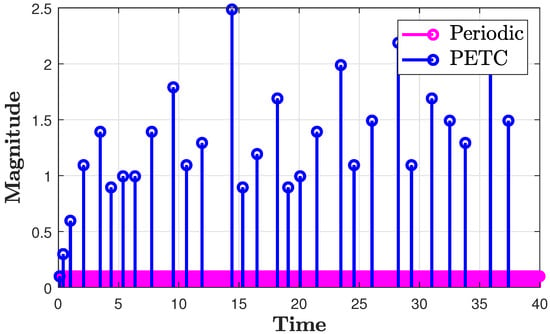
Figure 13.
Periodic and transmission instants for state feedback control.
Table 3 shows the comparison with [44] in this case.
Table 3.
Comparison with [44] on the number of triggering times.
From the second column of Table 3 we note that the proposed PETC produces almost the same number of triggering instants as in [44]. However, the periodic verifications of the ETC rule are reduced by 90% compared to [44]. In other words, the number of periodic instants at which the ETC needs to be checked is much lower than [44], leading to decreased energy consumption by the sensors.
Numerical Example
For the sake of comparison, we implement the proposed approach on the numerical example given in [29,38] and we compare the obtained results. The plant model in [38] is defined with
We design the observer-based controller via pole placement, such that the eigenvalues of are placed at , and the eigenvalues of are placed at , yielding the following gains:
Then, by following steps similar to the previous example, we obtain , , . By setting , and , and substituting in (28), we obtain and . The closed-loop response is presented in Figure 14 and Figure 15.
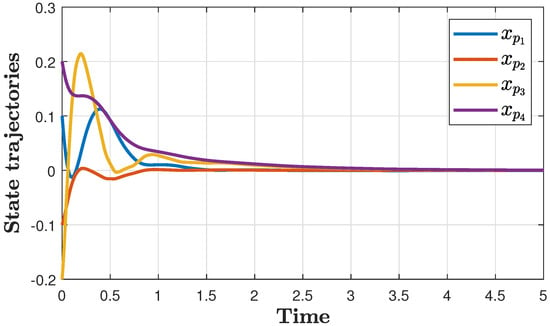
Figure 14.
State trajectories of the plant.
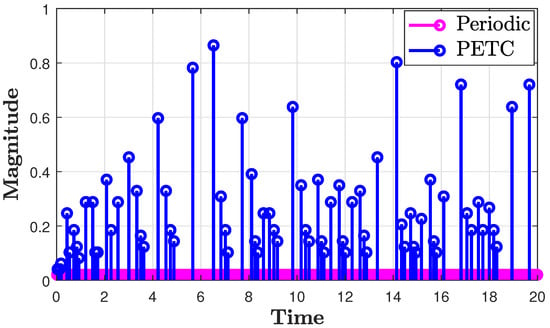
Figure 15.
Periodic and transmission instants.
The comparison of the obtained results is presented in Table 4 below.
Table 4.
Comparison with [29,38] on the number of triggering times and average transmissions.
The presented results in Table 4 clearly highlight the advantages of the proposed approach compared to [29,38] in terms of much less triggering instants and higher average inter-transmission intervals.
8. Design Procedure
In this section, we provide some guidelines that explain how to apply the proposed PETC approach in a systematic manner:
- 1.
- Put the plant model in the LTI form (2).
- 2.
- Check for controllability and observability.
- 3.
- Define the desired eigenvalues for the controller and the observer.
- 4.
- Compute the controller gain K and the observer gain L.
- 5.
- Derive the hybrid model as in (15).
- 6.
- Check the feasibility of the LMI condition (21) and find the values of PETC parameters, .
- 7.
- Run the control system using the flow and jump sets in (15).
9. Conclusions
We studied the problem of periodic event-triggered control for linear systems based only on the output measurement. The proposed solution is well adapted to practical implementation since the event-triggering mechanism is checked only at periodic time instants rather than continuous-time verification. The problem is formulated as a hybrid dynamical system to truly describe the dynamic behavior. By using the appropriate Lyapunov function, we show that the closed-loop stability is ensured while automatically ruling out the Zeno phenomenon. The effectiveness of the approach was proven by numerical simulation. The obtained results support the analysis in this study, where the asymptotic stability is achieved, as illustrated by the state response and the trajectory of the norm of the state. The inter-sampling behavior that has been considered in the analysis is consistent with the proposed ETC implementation as the sampling error is reset to zero at each triggering instant. The fruitful inclusion of the dynamic internal variable in the PETC mechanism has led to a significant reduction in the transmission load, as reflected by the simulation comparison. We show that the required conditions to apply the proposed approach are feasible for LTI systems, as demonstrated in the electronic circuit application and the numerical example. Finally, to allow for the systematic application of the proposed method, design procedure guidelines are outlined in a logical order.
In this study, we focused on illustrating the advantage of enriching the PETC mechanism with a dynamic variable. Hence, the robustness of the approach against exogenous input, such as external disturbances, measurement noises, and transmission delays, were not considered at this stage. However, the consideration of such phenomena is relevant, and in practice, requires careful revision of the analysis, as shown in [25]. Moreover, the PETC mechanism has been developed for LTI systems, which allows casting the required conditions in terms of the feasibility of an LMI condition. Hence, the extension of the approach to nonlinear systems requires a different set of assumptions and the stability analysis needs to be thoroughly revisited. Furthermore, it is important to take into account other network-induced issues such as quantization [47], packet dropout [38], scheduling [48], and malicious attacks [49] to make the approach more adapted to practical implementation. Finally, the PETC scheme in this study has been designed by emulation, which can result in a conservative design, as discussed in [50]. Hence, the joint design for both the controller and PETC mechanism is another interesting direction for future investigations.
Author Contributions
Conceptualization, M.A.; methodology, M.A.; formal analysis, D.A.; investigation, D.A.; simulation, M.A.; writing—original draft preparation, M.A.; writing—review and editing, D.A. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by Prince Sultan University, Riyadh, Saudi Arabia.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to acknowledge the support of Prince Sultan University for paying the article processing charge (APC) of this publication.
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
| plant state vector | controller state vector | ||
| control input | measured output | ||
| K | controller gain matrix | F | observer gain matrix |
| auxiliary time variable | concatenated state vector | ||
| flow set of the hybrid mode l | jump set of the hybrid model | ||
| T | periodic sampling interval | MATI bound | |
| ETC dynamic variable | dynamic variable to compute | ||
| sampling error | function of the sampling error | ||
| triggering instant | Lyapunov function candidates | ||
| updated values of at | dynamic ETC variable | ||
| , , | dynamic ETC functions |
References
- Zhang, D.; Shibc, P.; Wangd, Q.; Yu, L. Analysis and synthesis of networked control systems: A survey of recent advances and challenges. ISA Trans. 2017, 66, 376–392. [Google Scholar] [CrossRef]
- Alajmi, M.; Nour, M.; Hassine, S.; Alkhonaini, M.; Hamza, M.; Yaseen, I.; Zamani, A.; Rizwanullah, M. Energy Aware Secure Cyber-Physical Systems with Clustered Wireless Sensor Networks. Comput. Mater. Contin. 2022, 72, 5499–5513. [Google Scholar] [CrossRef]
- Lu, A.Y.; Yang, G.H. Observer-Based Control for Cyber-Physical Systems Under Denial-of-Service With a Decentralized Event-Triggered Scheme. IEEE Trans. Cybern. 2020, 50, 4886–4895. [Google Scholar] [CrossRef] [PubMed]
- Samy, S.; Cao, Y.; Ramachandran, R.; Alzabut, J.; Niezabitowski, M.; Lim, C. Globally asymptotic stability and synchronization analysis of uncertain multi-agent systems with multiple time-varying delays and impulses. Int. J. Robust Nonlinear Control 2022, 32, 737–773. [Google Scholar] [CrossRef]
- Filho, E.; Severino, R.; Santos, P.S.D.; Koubaa, A.; Tovar, E. Cooperative vehicular platooning: A multi-dimensional survey towards enhanced safety, security and validation. Cyber-Phys. Syst. 2023, 1–53. [Google Scholar] [CrossRef]
- Årzén, K. A Simple event-based PID controller. In Proceedings of the 14th IFAC World Congress, Beijing, China, 5–9 July 1999; Volume 18, pp. 423–428. [Google Scholar]
- Duca, O.; Minca, E.; Filipescu, A.; Şolea, R.; Cernega, D.; Paun, M. Event-based PID control in a flexible manufacturing process. In Proceedings of the 2022 26th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 19–21 October 2022; pp. 182–187. [Google Scholar] [CrossRef]
- da Silva, J.M.G., Jr.; Lages, W.F.; Sbarbaro, D. Event-triggered PI control design. In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 25–29 August 2014; pp. 6947–6952. [Google Scholar]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J.; Nešić, D. Input-to-state stabilization of nonlinear systems using event-triggered output feedback controllers. In Proceedings of the 14th European Control Conference, Linz, Austria, 15–17 July 2015; pp. 2185–2190. [Google Scholar] [CrossRef]
- Marchand, N.; Martinez, J.; Durand, S.; Guerrero-Castellanos, J. Lyapunov event-triggered control: A new event strategy based on the control. In Proceedings of the IFAC Symposium on Nonlinear Control, Toulouse, France, 4–6 September 2013; pp. 324–328. [Google Scholar]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J.; Nešić, D. Stabilization of nonlinear systems using event-triggered output feedback laws. IEEE Trans. Autom. Control 2016, 61, 2682–2687. [Google Scholar] [CrossRef]
- He, J.; Ma, Q.; Guo, J.; Zhou, C. Event-triggered mechanism based dynamic quantized output feedback controller for networked control systems. In Proceedings of the 29th Chinese Control and Decision Conference, Chongqing, China, 28–30 May 2017; pp. 2569–2574. [Google Scholar]
- Liu, C.; Hao, F. Dynamic output-feedback control for linear systems by using event-triggered quantisation. IET Control Theory Appl. 2015, 9, 1254–1263. [Google Scholar] [CrossRef]
- Tarbouriech, S.; Seuret, A.; da Silva Jr, J.; Sbarbaro, D. Observer-based event-triggered control co-design for linear systems. IET Control Theory Appl. 2016, 10, 2466–2473. [Google Scholar] [CrossRef]
- Tan, Y.; Yuan, Y.; Xie, X.; Niu, B. Dynamic event-triggered security control for networked T-S fuzzy system with non-uniform sampling. Fuzzy Sets Syst. 2023, 452, 91–109. [Google Scholar] [CrossRef]
- Eqtami, A.; Heshmati-Alamdari, S.; Dimarogonas, D.; Kyriakopoulos, K. Self-triggered model predictive control for nonholonomic systems. In Proceedings of the European Control Conference, Zurich, Switzerland, 17–19 July 2013; pp. 638–643. [Google Scholar]
- Wu, C.; Jiang, S.; Gao, S.; Liu, Y.; Han, H. Event-triggered model predictive control for dynamic energy management of electric vehicles in microgrids. J. Clean. Prod. 2022, 368, 133175. [Google Scholar] [CrossRef]
- Dimarogonas, D.; Johansson, K. Event-triggered control for multi-agent systems. In Proceedings of the IEEE Conference on Decision and Control and Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 7131–7136. [Google Scholar]
- Chen, X.; Liao, X.; Gao, L.; Yang, S.; Wang, H.; Li, H. Event-triggered consensus for multi-agent networks with switching topology under quantized communication. Neurocomputing 2017, 230, 294–301. [Google Scholar] [CrossRef]
- Li, K.; Liu, Q.; Zeng, Z. Quantized event-triggered communication based multi-agent system for distributed resource allocation optimization. Inf. Sci. 2021, 577, 336–352. [Google Scholar] [CrossRef]
- Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J. Event-triggered control of nonlinear singularly perturbed systems based only on the slow dynamics. In Proceedings of the IFAC Symposium on Nonlinear Control Systems, Toulouse, France, 4–6 September 2013; pp. 347–352. [Google Scholar] [CrossRef]
- Wu, J.; Peng, C.; Yang, H.; Wang, Y.L. Recent advances in event-triggered security control of networked systems: A survey. Int. J. Syst. Sci. 2022, 53, 2624–2643. [Google Scholar] [CrossRef]
- Yang, Y.; Fan, X.; Gao, W.; Yue, W.; Liu, A.; Geng, S.; Wu, J. Event-Triggered Output Feedback Control for a Class of Nonlinear Systems via Disturbance Observer and Adaptive Dynamic Programming. IEEE Trans. Fuzzy Syst. 2023, 31, 3148–3160. [Google Scholar] [CrossRef]
- Borgers, D.; Heemels, W. Event-Separation Properties of Event-Triggered Control Systems. IEEE Trans. Autom. Control 2014, 59, 2644–2656. [Google Scholar] [CrossRef]
- Heemels, W.; Donkers, M.; Teel, A. Periodic Event-Triggered Control for Linear Systems. IEEE Trans. Autom. Control 2013, 58, 847–861. [Google Scholar] [CrossRef]
- Postoyan, R.; Anta, A.; Heemels, W.; Tabuada, P.; Nešić, D. Periodic event-triggered control for nonlinear systems. In Proceedings of the IEEE Conference on Decision and Control, Florence, Italy, 10–13 December 2013; pp. 7397–7402. [Google Scholar]
- Li, C.; Zhao, X.; Chen, M.; Xing, W.; Zhao, N.; Zong, G. Dynamic Periodic Event-Triggered Control for Networked Control Systems Under Packet Dropouts. IEEE Trans. Autom. Sci. Eng. 2023, 1–15. [Google Scholar] [CrossRef]
- Wang, W.; Postoyan, R.; Nešić, D.; Heemels, W.P.M.H. Periodic Event-Triggered Control for Nonlinear Networked Control Systems. IEEE Trans. Autom. Control 2020, 65, 620–635. [Google Scholar] [CrossRef]
- Sun, J.; Zeng, Z. Periodic Event-Triggered Control for Networked Control Systems With External Disturbance and Input and Output Delays. IEEE Trans. Cybern. 2022, 1–9. [Google Scholar] [CrossRef]
- Yu, H.; Chen, T.; Hao, F. Output-Based Periodic Event-Triggered Control for Nonlinear Plants: An Approximate-Model Method. IEEE Trans. Control Netw. Syst. 2020, 7, 1342–1354. [Google Scholar] [CrossRef]
- Borgers, D.P.; Dolk, V.S.; Heemels, W.P.M.H. Riccati-Based Design of Event-Triggered Controllers for Linear Systems With Delays. IEEE Trans. Autom. Control 2018, 63, 174–188. [Google Scholar] [CrossRef]
- Carnevale, D.; Teel, A.; Nešić, D. A Lyapunov proof of an improved maximum allowable transfer interval for networked control systems. IEEE Trans. Autom. Control 2007, 52, 892–897. [Google Scholar] [CrossRef]
- Fu, A.; Mazo, M., Jr. Decentralized periodic event-triggered control with quantization and asynchronous communication. Automatica 2018, 94, 294–299. [Google Scholar] [CrossRef]
- Wei, X.; Fu, A.; Qiao, J. Traffic models of periodic event-triggered quantized control systems. Nonlinear Anal. Hybrid Syst. 2023, 49, 101370. [Google Scholar] [CrossRef]
- Dhullipalla, M.H.; Yu, H.; Chen, T. A framework for distributed control via dynamic periodic event-triggering mechanisms. Automatica 2022, 146, 110548. [Google Scholar] [CrossRef]
- Heemels, W.; Donkers, M.; Teel, A. Model-based periodic event-triggered control for linear systems. Automatica 2013, 49, 698–711. [Google Scholar] [CrossRef]
- Li, C.; Zhao, X.; Wu, C.; Liu, L.; Zhao, N. Periodic event-triggered dynamic output feedback control for networked control systems subject to packet dropouts. ISA Trans. 2023, in press. [CrossRef]
- Goebel, R.; Sanfelice, R.; Teel, A. Hybrid Dynamical Systems: Modeling, Stability, and Robustness; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Cai, C.; Teel, A. Characterizations of input-to-state stability for hybrid systems. Syst. Control Lett. 2009, 58, 47–53. [Google Scholar] [CrossRef]
- Girard, A. Dynamic triggering mechanisms for event-triggered control. IEEE Trans. Autom. Control 2015, 60, 1992–1997. [Google Scholar] [CrossRef]
- Dolk, V.; Borgers, D.; Heemels, W. Output-based and decentralized dynamic event-triggered control with guaranteed Lp-gain performance and Zeno-freeness. IEEE Trans. Autom. Control 2017, 62, 34–49. [Google Scholar] [CrossRef]
- Postoyan, R.; Tabuada, P.; Nešić, D.; Anta, A. A Framework for the Event-Triggered Stabilization of Nonlinear Systems. IEEE Trans. Autom. Control 2015, 60, 982–996. [Google Scholar] [CrossRef]
- Liu, J.; Yang, M.; Tian, E.; Cao, J.; Fei, S. Event-Based Security Control for State-Dependent Uncertain Systems Under Hybrid-Attacks and Its Application to Electronic Circuits. IEEE Trans. Circuits Syst. I Regul. Pap. 2019, 66, 4817–4828. [Google Scholar] [CrossRef]
- Lofberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation (IEEE Cat. No.04CH37508), Taipei, Taiwan, 2–4 September 2004; pp. 284–289. [Google Scholar] [CrossRef]
- Sanfelice, R.G.; Copp, D.; Nanez, P. A toolbox for simulation of hybrid systems in MATLAB/SIMULINK: Hybrid equations (HyEQ) toolbox (HSCC). In Proceedings of the 16th International Conference on Hybrid Systems: Computation and Control, Philadelphia, PA, USA, 8–11 April 2013; pp. 101–106. [Google Scholar] [CrossRef]
- Abdelrahim, M.; Dolk, V.; Heemels, W. Input-to-state stabilizing event-triggered control for linear systems with output quantization. In Proceedings of the 55th IEEE Conference on Decision and Control, Las Vegas, NV, USA, 12–14 December 2016; pp. 483–488. [Google Scholar] [CrossRef]
- Wu, J.; Jia, Q.; Johansson, K.; Shi, L. Event-based sensor data scheduling: Trade-off between communication rate and estimation quality. IEEE Trans. Autom. Control 2013, 58, 1041–1046. [Google Scholar] [CrossRef]
- Chen, X.; Wang, Y.; Hu, S. Event-triggered quantized H∞ control for networked control systems in the presence of denial-of-service jamming attacks. Nonlinear Anal. Hybrid Syst. 2019, 33, 265–281. [Google Scholar] [CrossRef]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J.; Nešić, D.; Heemels, W. Co-design of output feedback laws and event-triggering conditions for the L2-stabilization of linear systems. Automatica 2018, 87, 337–344. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).