
Detection of Apple Leaf Diseases Based on LightYOLO-AppleLeafDx


Abstract
1. Introduction
2. Materials and Methods
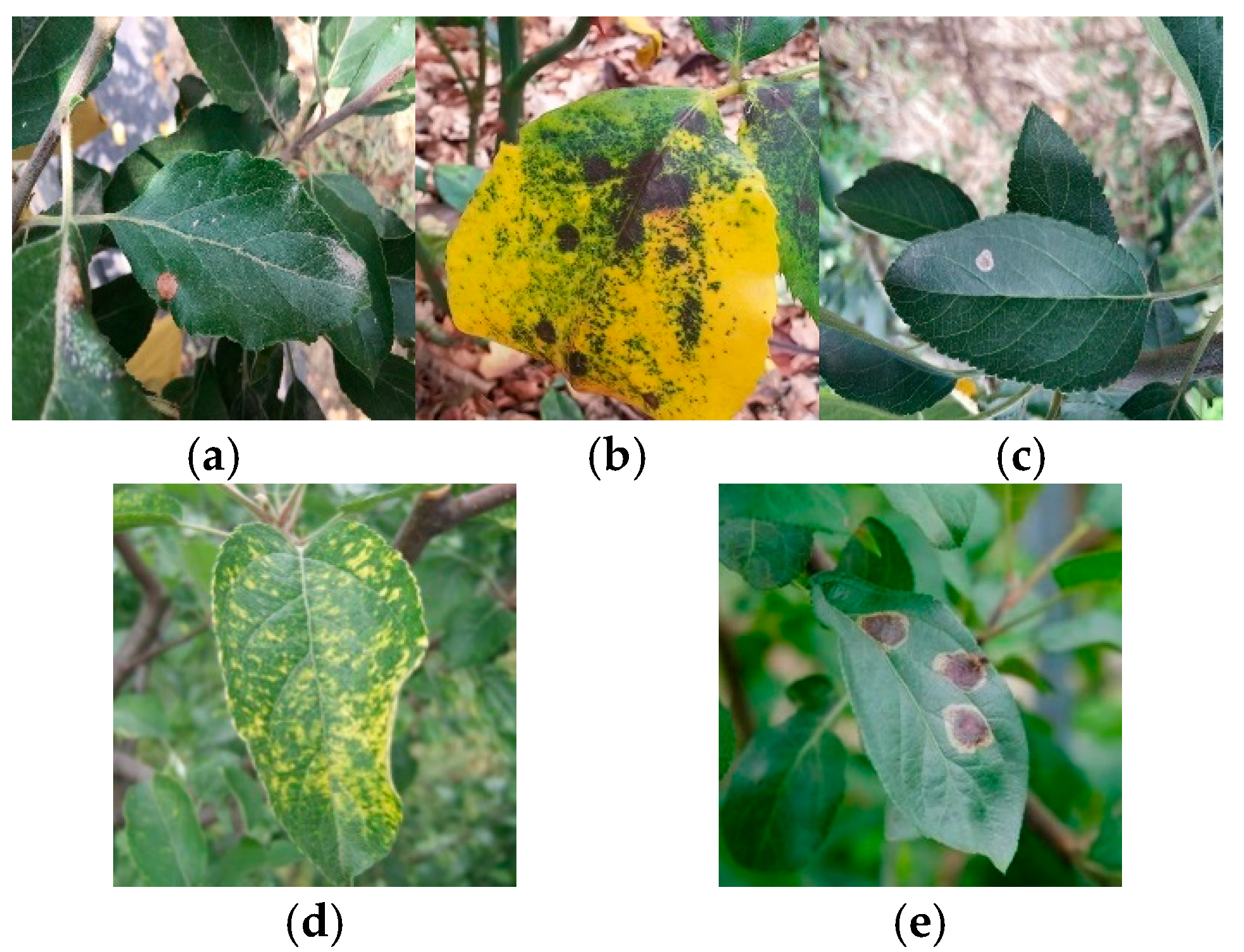
2.1. Materials
2.2. Methods
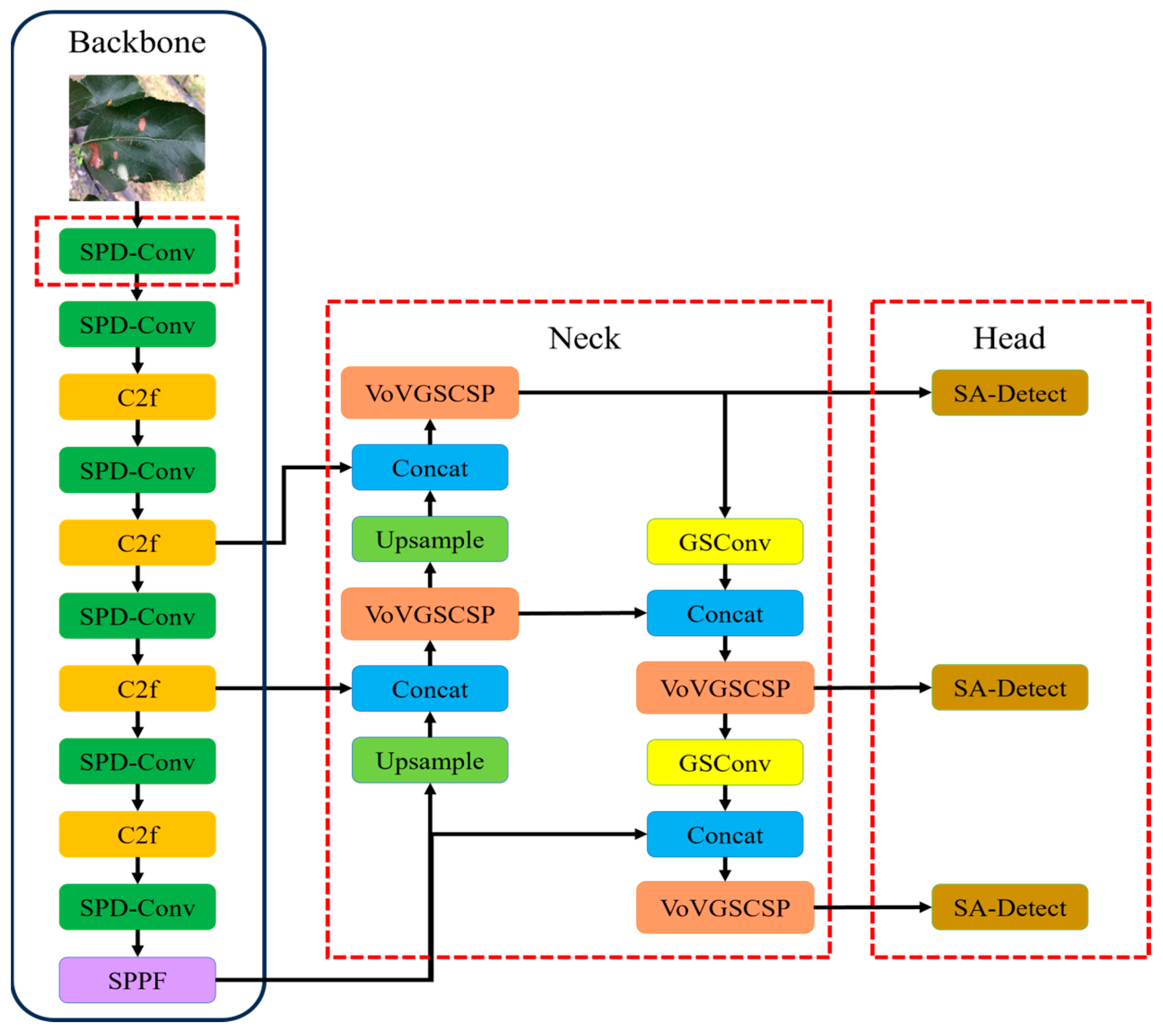
2.2.1. Proposed Algorithm
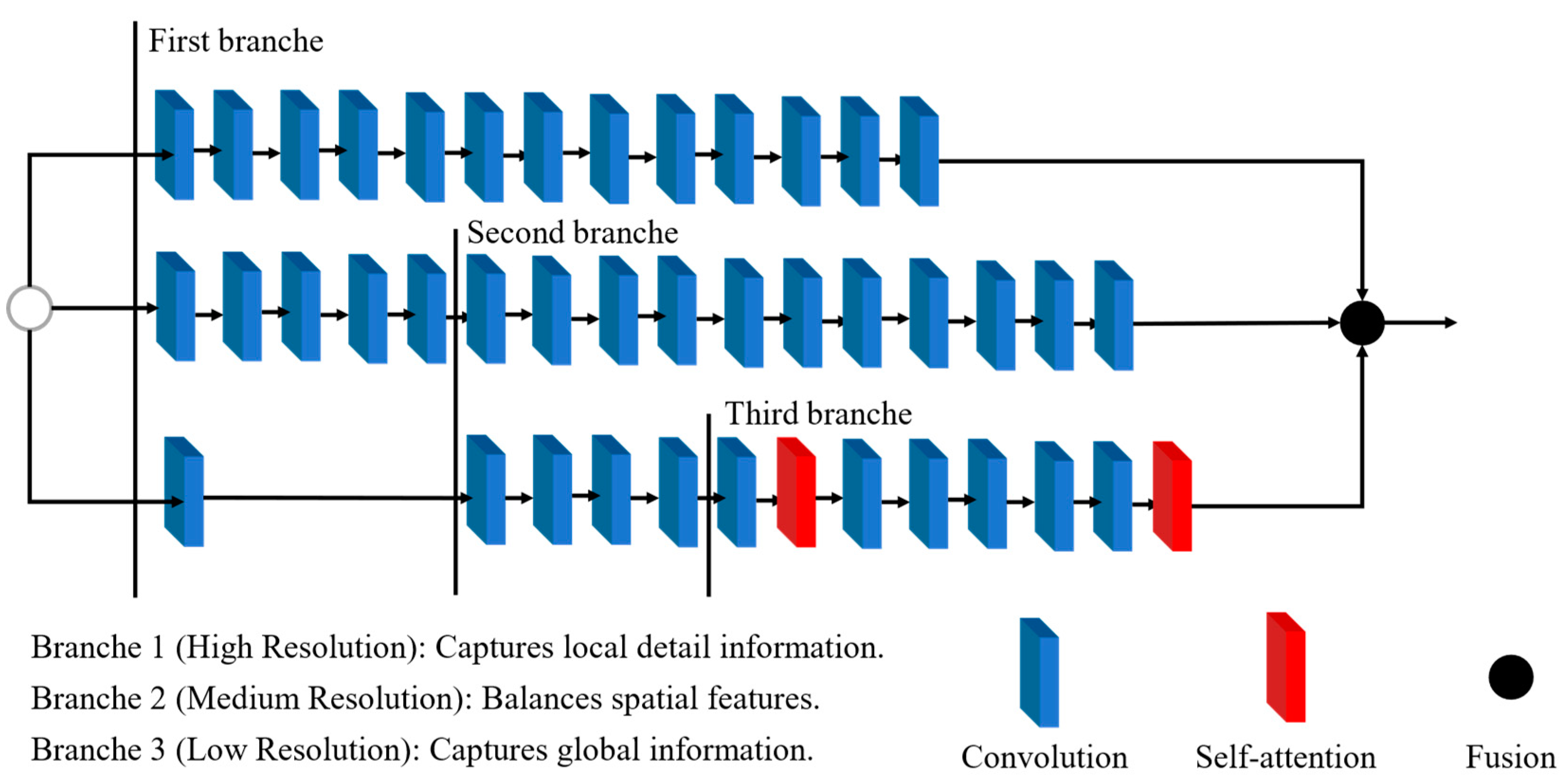
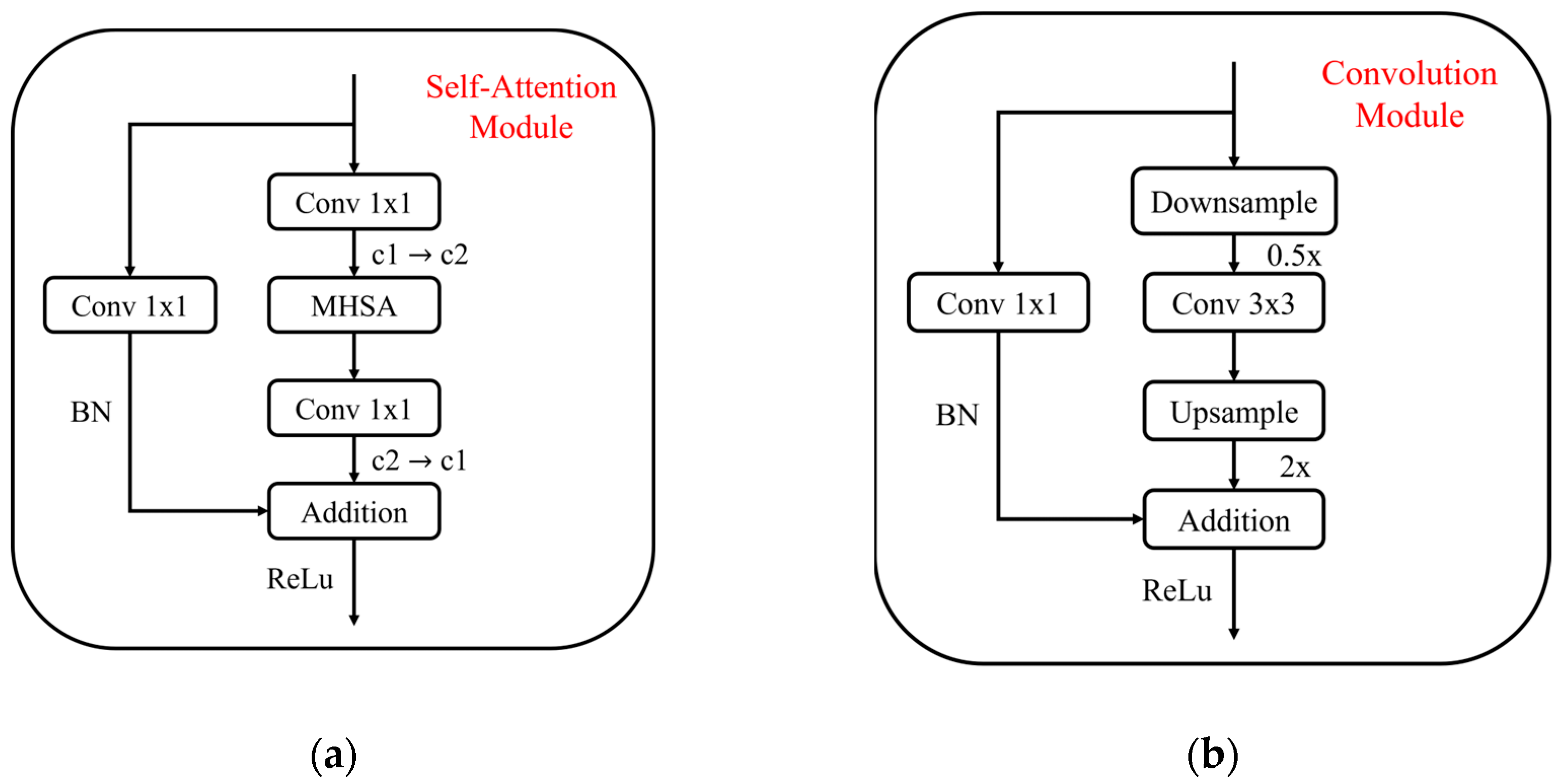
2.2.2. Improvements in the Convolutional Neural Network
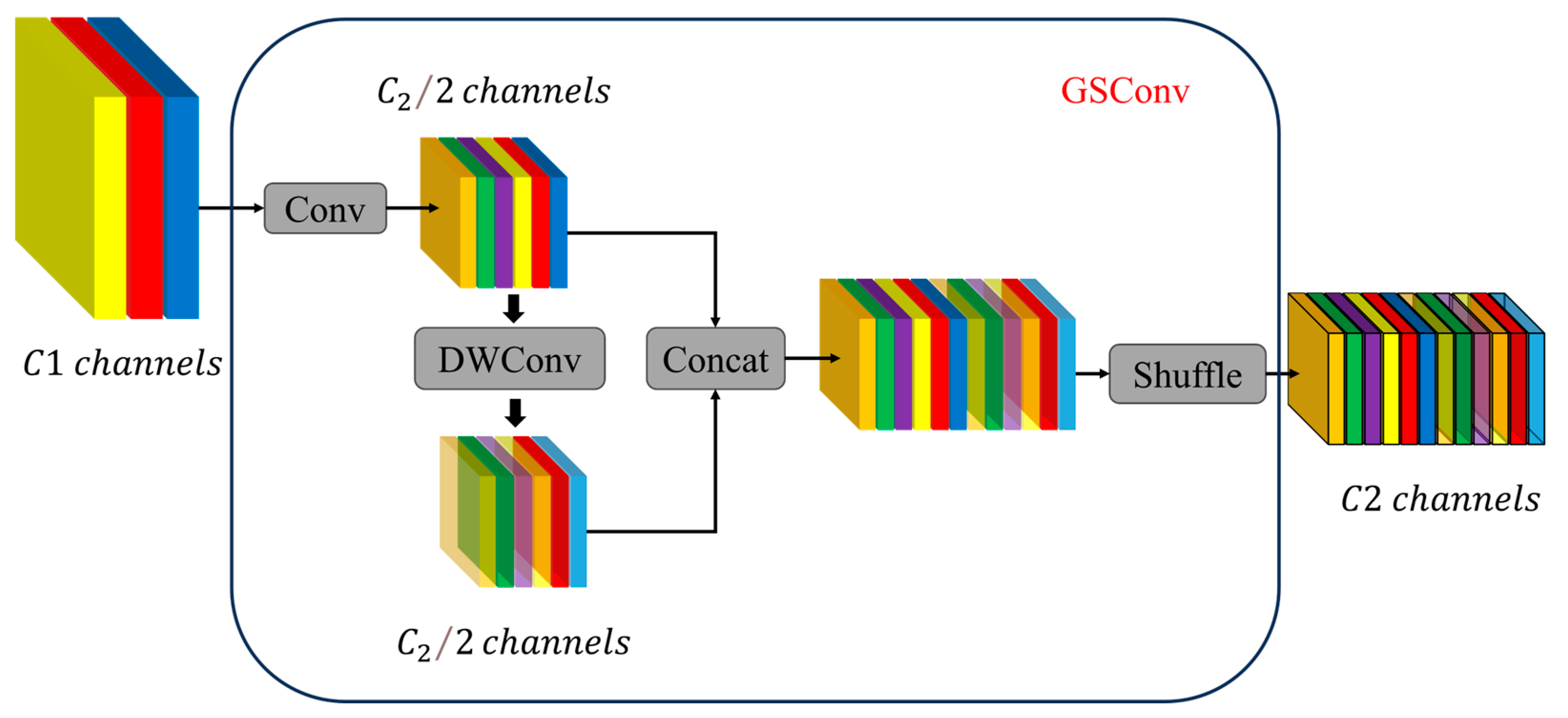
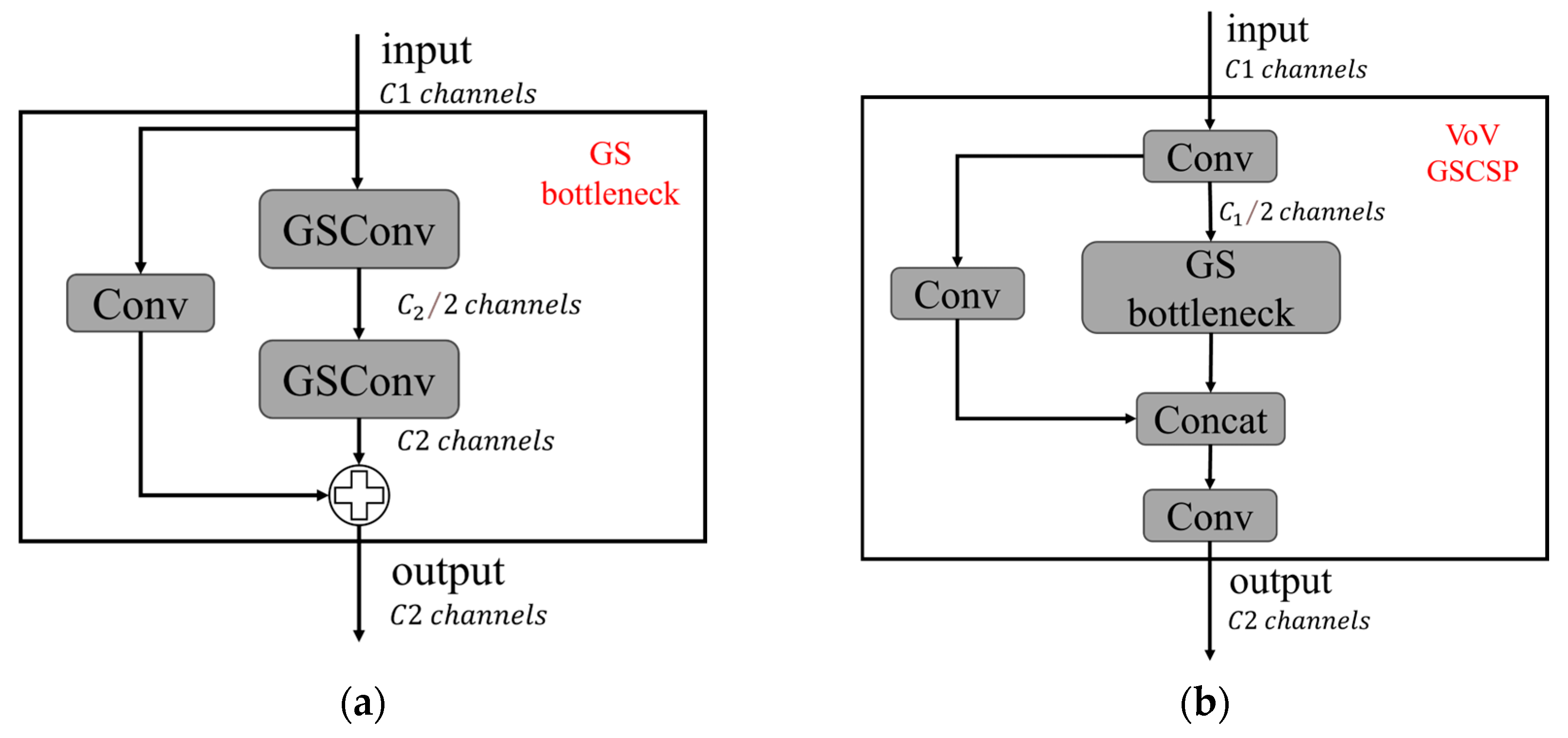
2.2.3. Improvements in the Neck Component
2.2.4. Improvements in the Detection Head
3. Results
3.1. Experimental Environment and Model Evaluation Metrics
3.2. Ablation Study
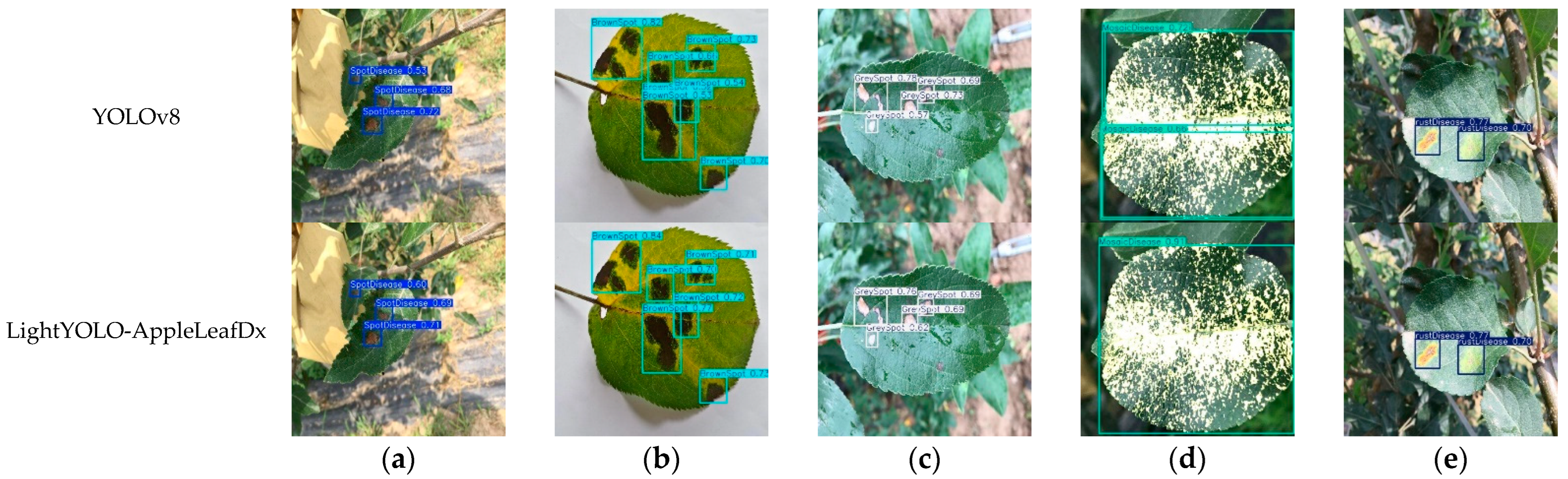
3.3. Comparative Experiments with Different Models
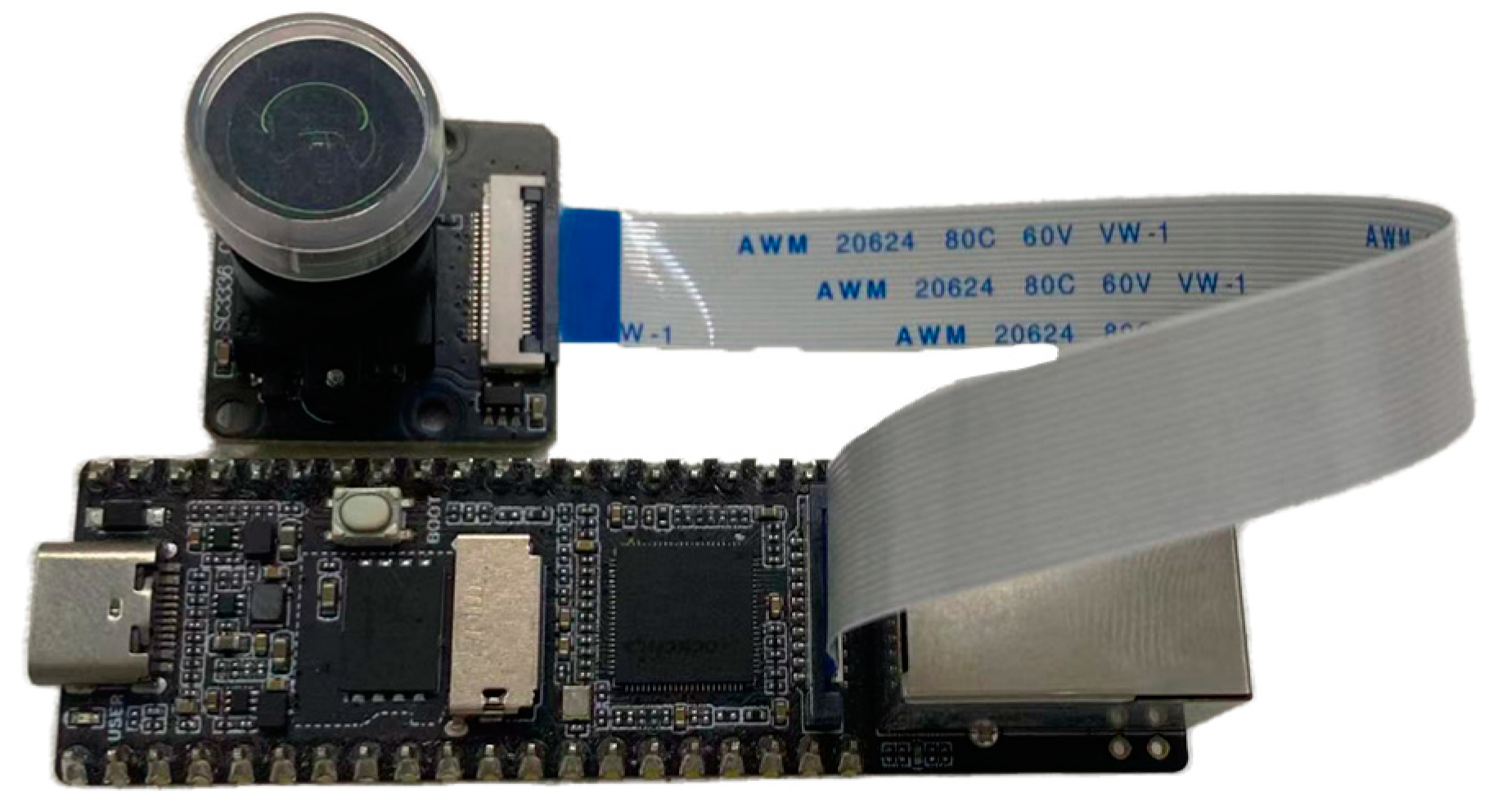
3.4. Deployment on Edge Devices
4. Conclusions
- 1.
- Effectiveness of Model Improvements:
- 2.
- Lightweight and Efficient Design:
- 3.
- Practical Application Value:
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liang, X.; Zhang, R.; Gleason, M.L.; Sun, G. Sustainable apple disease management in China: Challenges and future directions for a transforming industry. Plant Dis. 2022, 106, 786–799. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Pan, C. State analysis of apple industry in China. IOP Conf. Ser. Earth Environ. Sci. 2021, 831, 012067. [Google Scholar] [CrossRef]
- Corceiro, A.; Alibabaei, K.; Assunção, E.; Gaspar, P.D.; Pereira, N. Methods for detecting and classifying weeds, diseases and fruits using AI to improve the sustainability of agricultural crops: A review. Processes 2023, 11, 1263. [Google Scholar] [CrossRef]
- Terentev, A.; Dolzhenko, V.; Fedotov, A.; Eremenko, D. Current state of hyperspectral remote sensing for early plant disease detection: A review. Sensors 2022, 22, 757. [Google Scholar] [CrossRef] [PubMed]
- Omrani, E.; Khoshnevisan, B.; Shamshirband, S.; Saboohi, H.; Anuar, N.B.; Nasir, M.H.N.M. Potential of radial basis function-based support vector regression for apple disease detection. Measurement 2014, 55, 512–519. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Afifi, A.; Alhumam, A.; Abdelwahab, A. Convolutional neural network for automatic identification of plant diseases with limited data. Plants 2020, 10, 28. [Google Scholar] [CrossRef] [PubMed]
- Chaudhary, A.; Thakur, R.; Kolhe, S.; Kamal, R. A particle swarm optimization based ensemble for vegetable crop disease recognition. Comput. Electron. Agric. 2020, 178, 105747. [Google Scholar] [CrossRef]
- Jiang, P.; Chen, Y.; Liu, B.; He, D.; Liang, C. Real-time detection of apple leaf diseases using deep learning approach based on improved convolutional neural networks. IEEE Access 2019, 7, 59069–59080. [Google Scholar] [CrossRef]
- Chao, X.; Sun, G.; Zhao, H.; Li, M.; He, D. Identification of apple tree leaf diseases based on deep learning models. Symmetry 2020, 12, 1065. [Google Scholar] [CrossRef]
- Liu, S.; Qiao, Y.; Li, J.; Zhang, H.; Zhang, M.; Wang, M. An improved lightweight network for real-time detection of apple leaf diseases in natural scenes. Agronomy 2022, 12, 2363. [Google Scholar] [CrossRef]
- Xu, W.; Wang, R. ALAD-YOLO: An lightweight and accurate detector for apple leaf diseases. Front. Plant Sci. 2023, 14, 1204569. [Google Scholar]
- Wang, Y.; Wang, Y.; Zhao, J. MGA-YOLO: A lightweight one-stage network for apple leaf disease detection. Front. Plant Sci. 2022, 13, 927424. [Google Scholar] [CrossRef] [PubMed]
- Zhu, R.; Zou, H.; Li, Z.; Ni, R.J. Apple-Net: A model based on improved YOLOv5 to detect the apple leaf diseases. Plants 2022, 12, 169. [Google Scholar] [CrossRef] [PubMed]
- Dai, G.; Hu, L.; Fan, J.J. DA-ActNN-YOLOV5: Hybrid YOLO v5 Model with Data Augmentation and Activation of Compression Mechanism for Potato Disease Identification. Comput. Intell. Neurosci. 2022, 2022, 6114061. [Google Scholar] [CrossRef] [PubMed]
- Devi Priya, R.; Devisurya, V.; Anitha, N.; Dharani; Geetha, B.; Kirithika, R. Faster R-CNN with augmentation for efficient cotton leaf disease detection. In Proceedings of the International Conference on Hybrid Intelligent Systems, Online, 14–16 December 2021; pp. 140–148. [Google Scholar]
- Pandian, J.A.; Geetharamani, G.; Annette, B. Data augmentation on plant leaf disease image dataset using image manipulation and deep learning techniques. In Proceedings of the 2019 IEEE 9th International Conference on Advanced Computing (IACC), Tiruchirappalli, India, 13–14 December 2019; pp. 199–204. [Google Scholar]
- Haruna, Y.; Qin, S.; Mbyamm Kiki, M.J. An improved approach to detection of rice leaf disease with gan-based data augmentation pipeline. Appl. Sci. 2023, 13, 1346. [Google Scholar] [CrossRef]
- Ding, R.; Qiao, Y.; Yang, X.; Jiang, H.; Zhang, Y.; Huang, Z.; Wang, D.; Liu, H. Improved ResNet based apple leaf diseases identification. IFAC-Papersonline 2022, 55, 78–82. [Google Scholar] [CrossRef]
- Cui, W.; Li, Z.; Duanmu, A.; Xue, S.; Guo, Y.; Ni, C.; Zhu, T.; Zhang, Y. CCG-YOLOv7: A Wood Defect Detection Model for Small Targets Using Improved YOLOv7; IEEE: Piscataway, NJ, USA, 2024. [Google Scholar]
- Xue, S.; Li, Z.; Wu, R.; Zhu, T.; Yuan, Y.; Ni, C. Few-shot learning for small impurities in tobacco stems with improved YOLOv7. IEEE Access 2023, 11, 48136–48144. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, Y.; Wang, Z.; Jiang, Y. YOLOv7-RAR for urban vehicle detection. Sensors 2023, 23, 1801. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Zhou, G.; Chen, A.; He, M.; Li, J.; Hu, Y. A precise apple leaf diseases detection using BCTNet under unconstrained environments. Comput. Electron. Agric. 2023, 212, 108132. [Google Scholar] [CrossRef]
- Wang, N.; Ning, F.; Lu, S. Research on identification method of apple leaf diseases based on support vector machine. Shandong Agric. 2015, 141, 122–125. [Google Scholar]
- Varghese, R.; Sambath, M. YOLOv8: A Novel Object Detection Algorithm with Enhanced Performance and Robustness. In Proceedings of the 2024 International Conference on Advances in Data Engineering and Intelligent Computing Systems (ADICS), Chnnai, India, 18–19 April 2024; pp. 1–6. [Google Scholar]
- Lou, H.; Duan, X.; Guo, J.; Liu, H.; Gu, J.; Bi, L.; Chen, H. DC-YOLOv8: Small-size object detection algorithm based on camera sensor. Electronics 2023, 12, 2323. [Google Scholar] [CrossRef]
- Sapkota, R.; Ahmed, D.; Karkee, M. Comparing YOLOv8 and Mask R-CNN for instance segmentation in complex orchard environments. Artif. Intell. Agric. 2024, 13, 84–99. [Google Scholar] [CrossRef]
- Yang, G.; Wang, J.; Nie, Z.; Yang, H.; Yu, S. A lightweight YOLOv8 tomato detection algorithm combining feature enhancement and attention. Agronomy 2023, 13, 1824. [Google Scholar] [CrossRef]
- Riad, R.; Teboul, O.; Grangier, D.; Zeghidour, N. Learning strides in convolutional neural networks. arXiv 2022, arXiv:2202.01653. [Google Scholar]
- Sunkara, R.; Luo, T. No more strided convolutions or pooling: A new CNN building block for low-resolution images and small objects. In Proceedings of the Joint European Conference on Machine Learning and Knowledge Discovery in Databases, Vilnius, Lithuania, 8–12 September 2022; pp. 443–459. [Google Scholar]
- Li, H.; Li, J.; Wei, H.; Liu, Z.; Zhan, Z.; Ren, Q. Slim-neck by GSConv: A better design paradigm of detector architectures for autonomous vehicles. arXiv 2022, arXiv:2206.02424. [Google Scholar]
- Huang, G.; Liu, S.; Van der Maaten, L.; Weinberger, K.Q. Condensenet: An efficient densenet using learned group convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2752–2761. [Google Scholar]
- Wang, C.-Y.; Liao, H.-Y.M.; Wu, Y.-H.; Chen, P.-Y.; Hsieh, J.-W.; Yeh, I.-H. CSPNet: A new backbone that can enhance learning capability of CNN. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 390–391. [Google Scholar]
- Yu, H.; Wan, C.; Liu, M.; Chen, D.; Xiao, B.; Dai, X. Real-Time Image Segmentation via Hybrid Convolutional-Transformer Architecture Search. arXiv 2024, arXiv:2403.10413. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Label | Dataset | Train Set | Test Set |
|---|---|---|---|---|
| Spot disease | 0 | 3288 | 2630 | 658 |
| Brown spot | 1 | 3096 | 2477 | 619 |
| Grey spot | 2 | 2680 | 2144 | 536 |
| Mosaic disease | 3 | 2504 | 2003 | 501 |
| Rust disease | 4 | 2304 | 1843 | 461 |
| Parameter | Value |
|---|---|
| Epoch | 250 |
| Images size | 640 × 640 |
| Batch size | 32 |
| Learn rate | 0.01 |
| Weight_decay | 0.0005 |
| Momentum | 0.937 |
| Method | P | R | mAP@0.5/% | mAP@0.5:0.95/% | Param/M | GFLOPs/G | Model Size/MB | FPS/ () |
|---|---|---|---|---|---|---|---|---|
| YOLOv8n | 0.911 | 0.921 | 0.955 | 0.577 | 3.157 | 8.9 | 6.3 | 256.7 |
| YOLOv8n + Slim-Neck | 0.928 | 0.926 | 0.964 | 0.585 | 2.799 | 7.3 | 5.9 | 163.8 |
| YOLOv8n + SPD-Conv | 0.922 | 0.932 | 0.964 | 0.584 | 2.789 | 7.6 | 5.8 | 235.8 |
| YOLOv8n + SAHead | 0.926 | 0.924 | 0.961 | 0.581 | 2.868 | 7 | 6.0 | 153.5 |
| YOLOv8n + Slim-Neck + SPD-Conv | 0.912 | 0.940 | 0.962 | 0.585 | 2.582 | 6.8 | 5.5 | 155.6 |
| YOLOv8n + Slim-Neck + SAHead | 0.928 | 0.925 | 0.963 | 0.583 | 2.769 | 6.6 | 5.3 | 121.7 |
| YOLOv8n + SPD-Conv + SAHead | 0.924 | 0.928 | 0.962 | 0.582 | 2.761 | 6.9 | 5.3 | 144.2 |
| LightYOLO-AppleLeafDx | 0.930 | 0.923 | 0.965 | 0.587 | 2.443 | 5.7 | 5.2 | 107.2 |
| Method | P | R | mAP@0.5/% | mAP@0.5:0.95/% | Param/M | GFLOPs/G | Model Size/MB | FPS/ () |
|---|---|---|---|---|---|---|---|---|
| YOLOv8n | 0.911 | 0.921 | 0.955 | 0.577 | 3.157 | 8.9 | 6.3 | 256.7 |
| LightYOLO-AppleLeafDx | 0.930 | 0.923 | 0.965 | 0.587 | 2.443 | 5.7 | 5.2 | 107.2 |
| YOLOv5 | 0.892 | 0.855 | 0.945 | 0.565 | 2.655 | 7.8 | 5.7 | 145.6 |
| YOLOv6 | 0.868 | 0.851 | 0.935 | 0.555 | 4.500 | 13.1 | 7.2 | 110.2 |
| YOLOv7 | 0.907 | 0.882 | 0.950 | 0.570 | 3.545 | 10.4 | 6.0 | 135.8 |
| Models | Hardware Environment | FPS/ () | mAP/% |
|---|---|---|---|
| YOLOv8n | NVIDIA GeForce RTX 2080 Ti | 256.7 | 95.5 |
| RKNN-Toolkit2-Emulation | 53.5 | 94.8 | |
| RV1103 NPU | 30.1 | 95.1 | |
| LightYOLO-AppleLeafDx | NVIDIA GeForce RTX 2080 Ti | 107.2 | 96.5 |
| RKNN-Toolkit2-Emulation | 23.1 | 95.2 | |
| RV1103 NPU | 14.8 | 95.9 |
| Models | NPU-FPS/ () | mAP/% |
|---|---|---|
| YOLOv8n + Slim-Neck | 20.5 | 0.957 |
| YOLOv8n + SPD-Conv | 28.1 | 0.956 |
| YOLOv8n + SAHead | 19.8 | 0.956 |
| YOLOv8n + Slim-Neck + SPD-Conv | 19.8 | 0.954 |
| YOLOv8n + Slim-Neck + SAHead | 15.9 | 0.953 |
| YOLOv8n + SPD-Conv + SAHead | 18.2 | 0.956 |
| YOLOv5 | 17.4 | 0.935 |
| YOLOv6 | 13.4 | 0.926 |
| YOLOv7 | 16.3 | 0.944 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, H.; Lv, P.; Zhao, M. Detection of Apple Leaf Diseases Based on LightYOLO-AppleLeafDx. Plants 2025, 14, 599. https://doi.org/10.3390/plants14040599
Zou H, Lv P, Zhao M. Detection of Apple Leaf Diseases Based on LightYOLO-AppleLeafDx. Plants. 2025; 14(4):599. https://doi.org/10.3390/plants14040599
Chicago/Turabian StyleZou, Hongyan, Peng Lv, and Maocheng Zhao. 2025. "Detection of Apple Leaf Diseases Based on LightYOLO-AppleLeafDx" Plants 14, no. 4: 599. https://doi.org/10.3390/plants14040599
APA StyleZou, H., Lv, P., & Zhao, M. (2025). Detection of Apple Leaf Diseases Based on LightYOLO-AppleLeafDx. Plants, 14(4), 599. https://doi.org/10.3390/plants14040599