A Hybrid Dead Reckon System Based on 3-Dimensional Dynamic Time Warping


Abstract
:1. Introduction
- (1)
- Integrated indoor positioning system does not require infrastructure to be deployed, greatly reducing the time and money costs.
- (2)
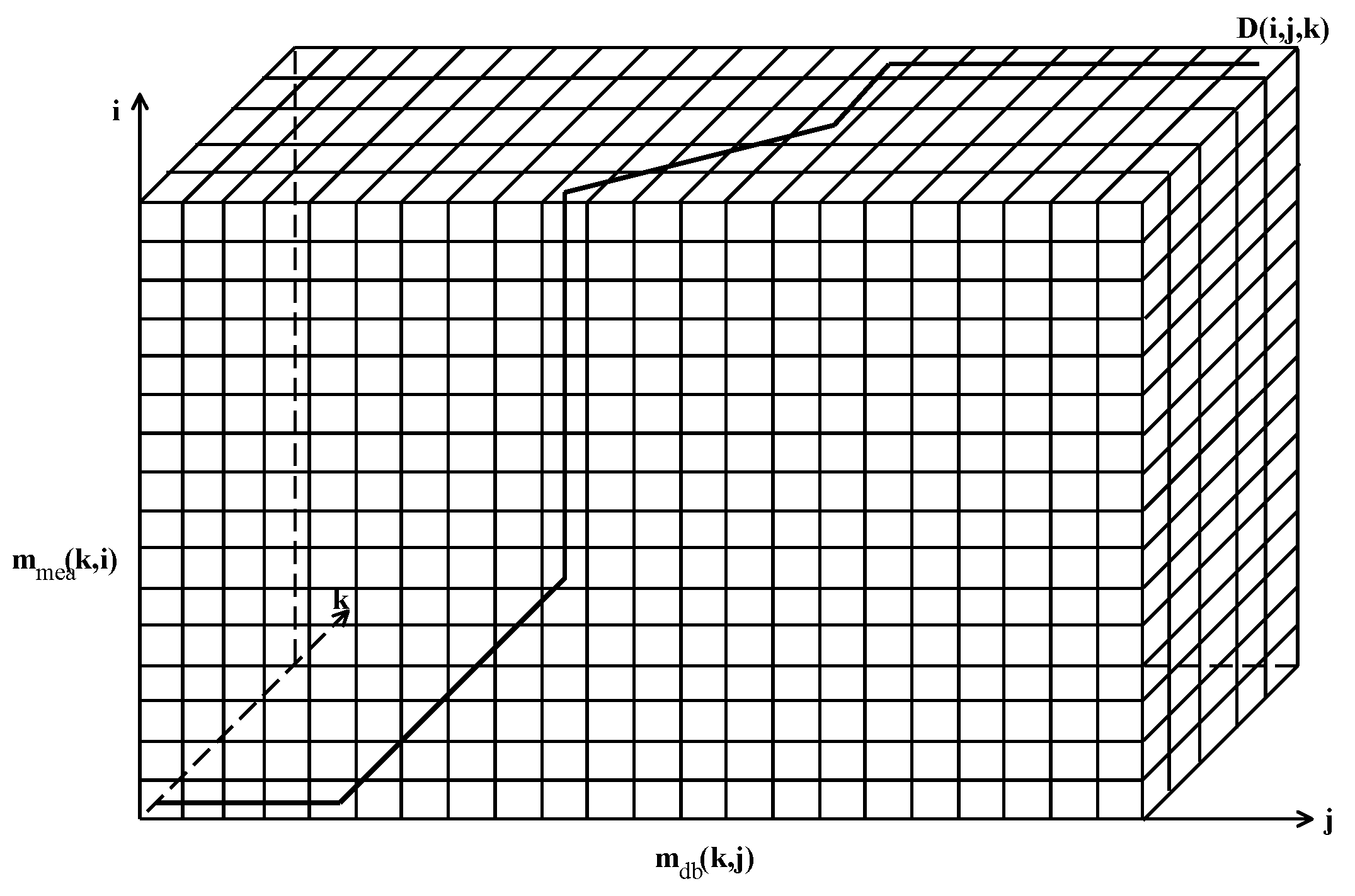
- DTW is usually calculated the distance between the measured magnetic field and magnetic fingerprint in the database. For DR/MM, we creatively propose 3DDTW to calculate the distance. Unlike traditional DTW, 3DDTW extends the original one-dimensional signal to a two-dimensional signal.
- (3)
- Many practical problems are considered in the DR/MM positioning system. The solutions to these problems further improve the positioning accuracy. For three different walking experiments, the average positioning accuracy is about 3.34 m.
2. Related Work
3. System Model
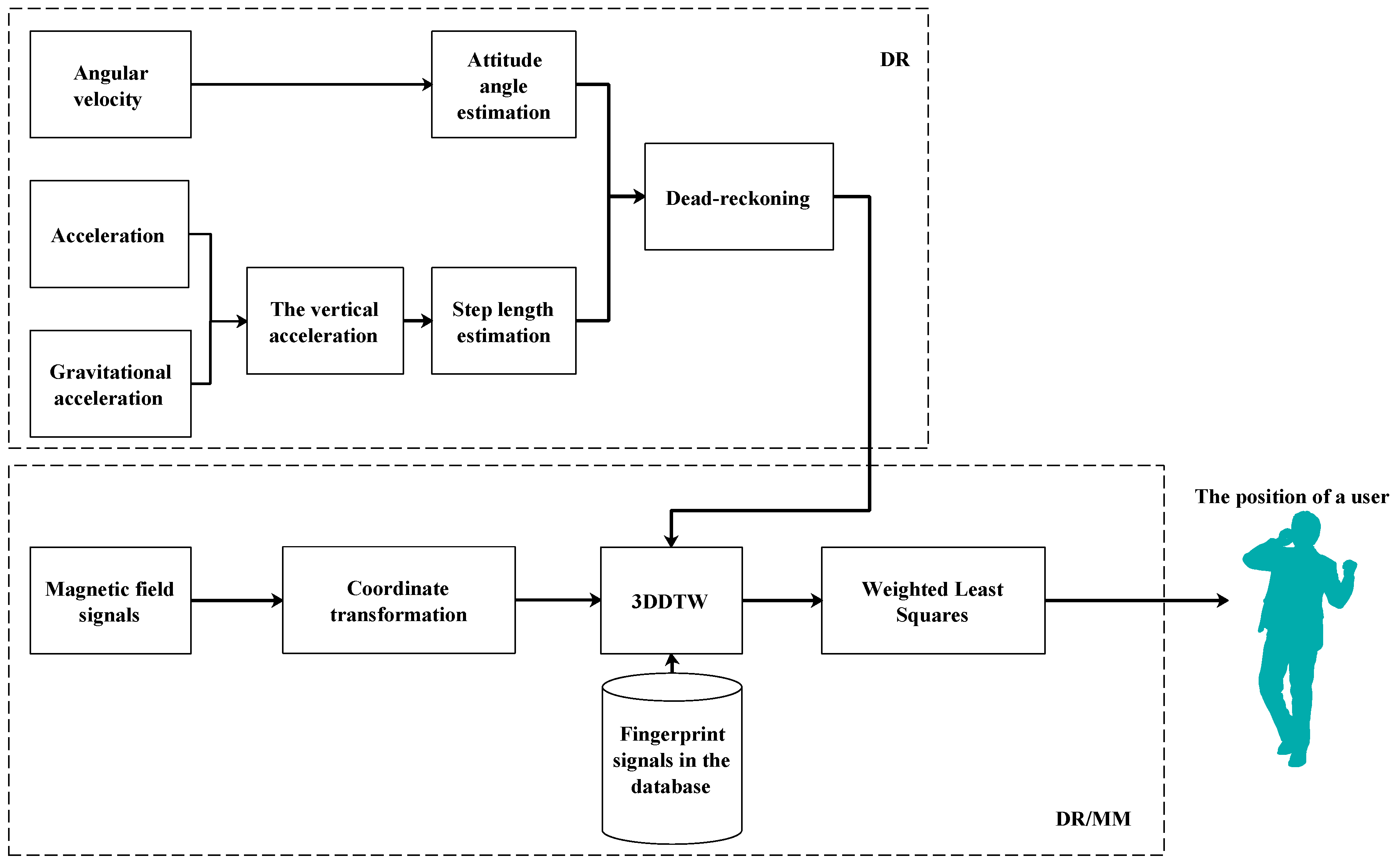
3.1. Dead-Reckonging
3.1.1. Attitude Angle Estimation Model
3.1.2. Step Length Model
3.1.3. Step Counting Model
3.1.4. DR-Based Position Path
3.2. Dead-Reckoning and Magnetic Matching (DR/MM)
3.2.1. Dynamic Time Warping (DTW) for DR/MM
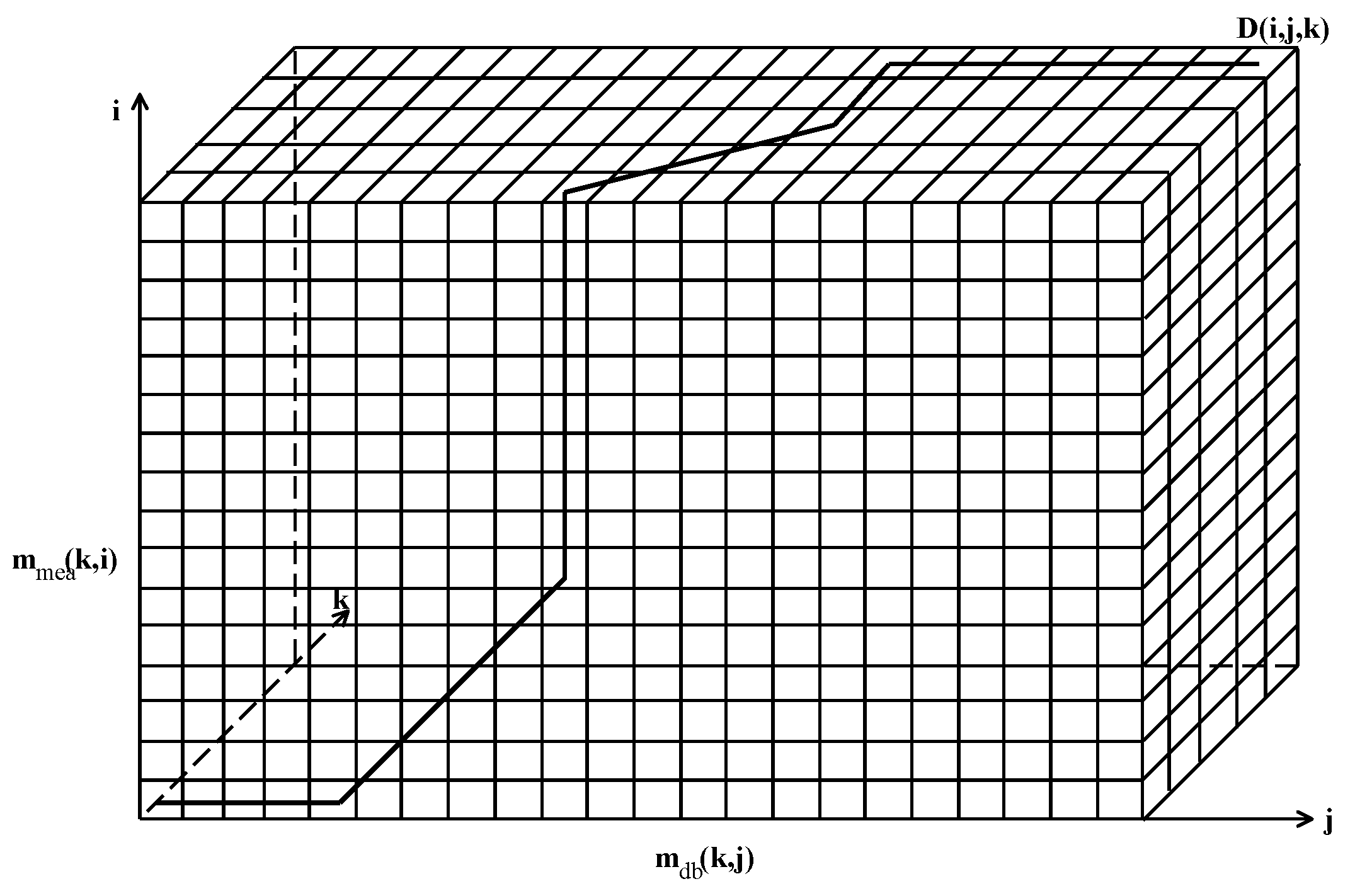
3.2.2. 3-Dimensional Dynamic Time Warping (3DDTW) for DR/MM
| Algorithm 1 3DDTW |
Input: The measured signal with p rows and n columns, fingerprint signal with p rows and m columns.
|
3.2.3. Weighted Least Squares for DR/MM
4. Experiments and Discussions
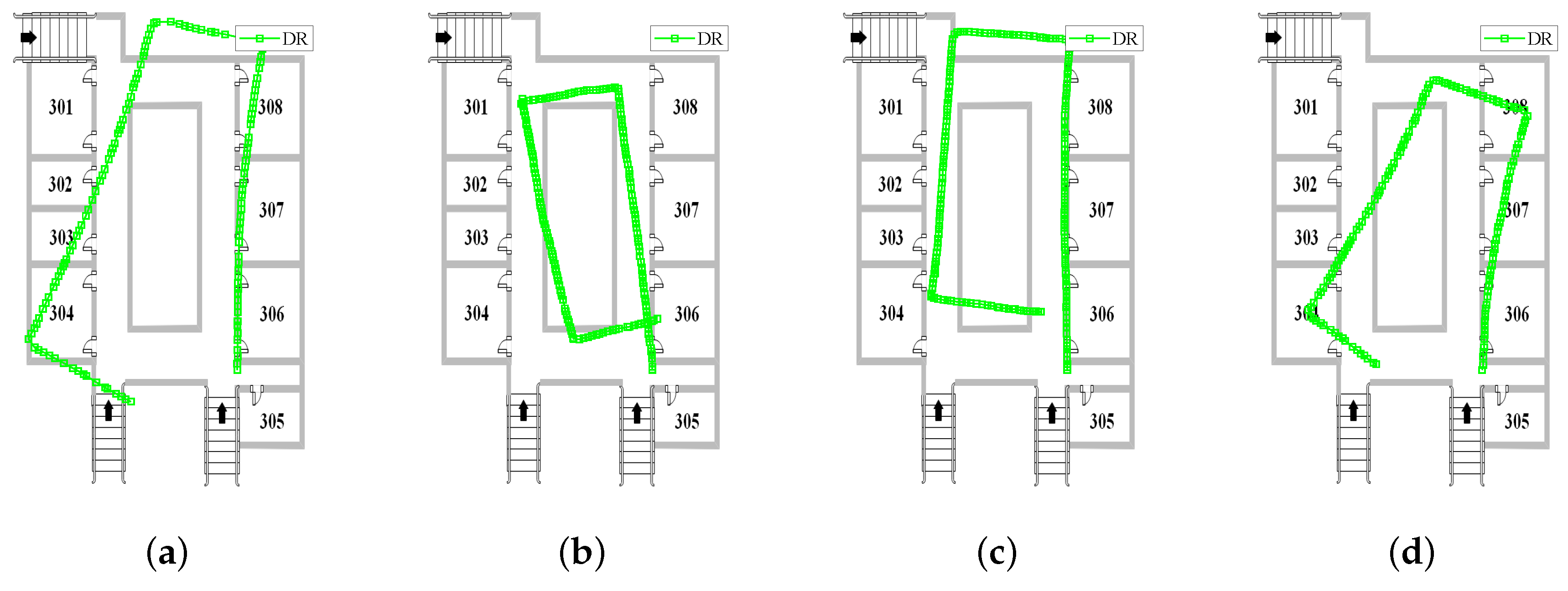
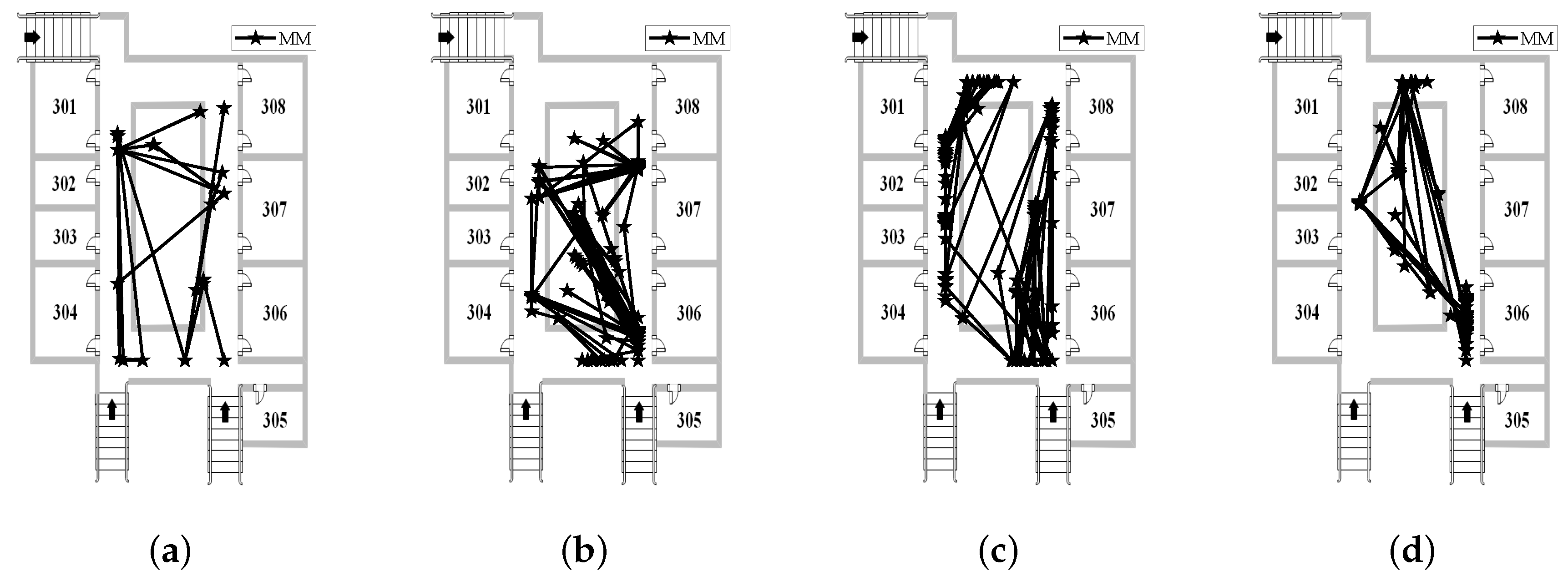
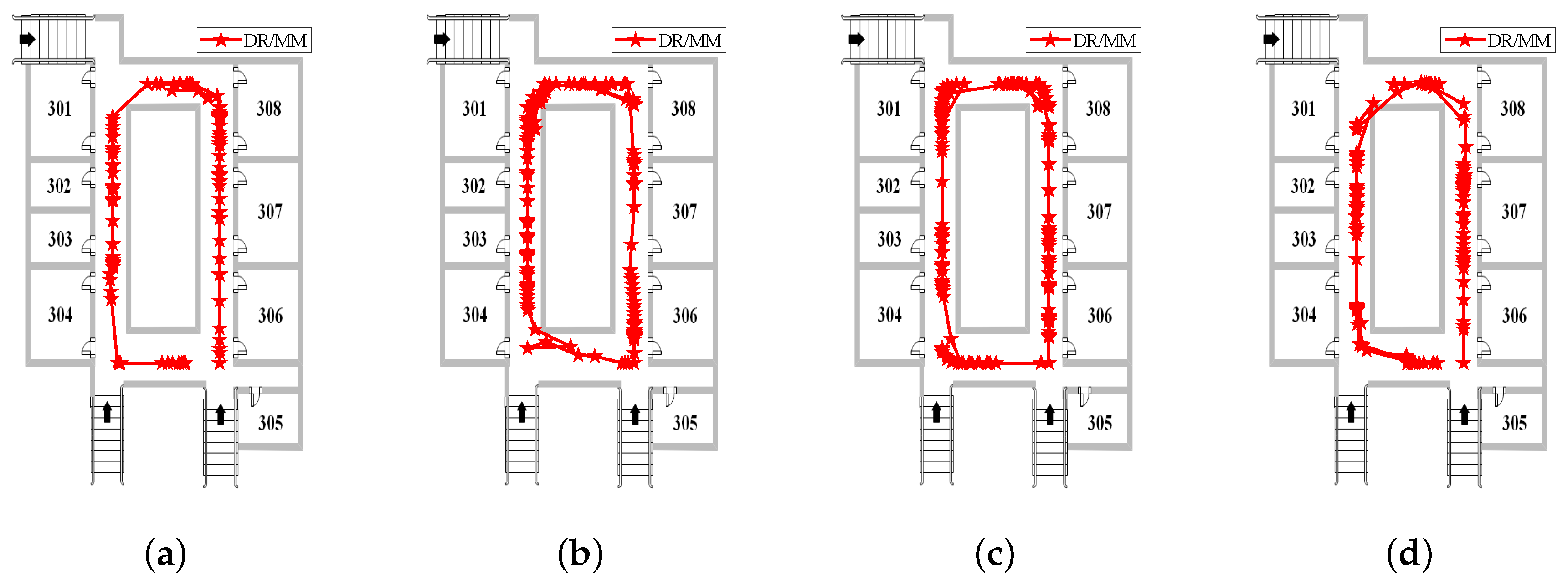
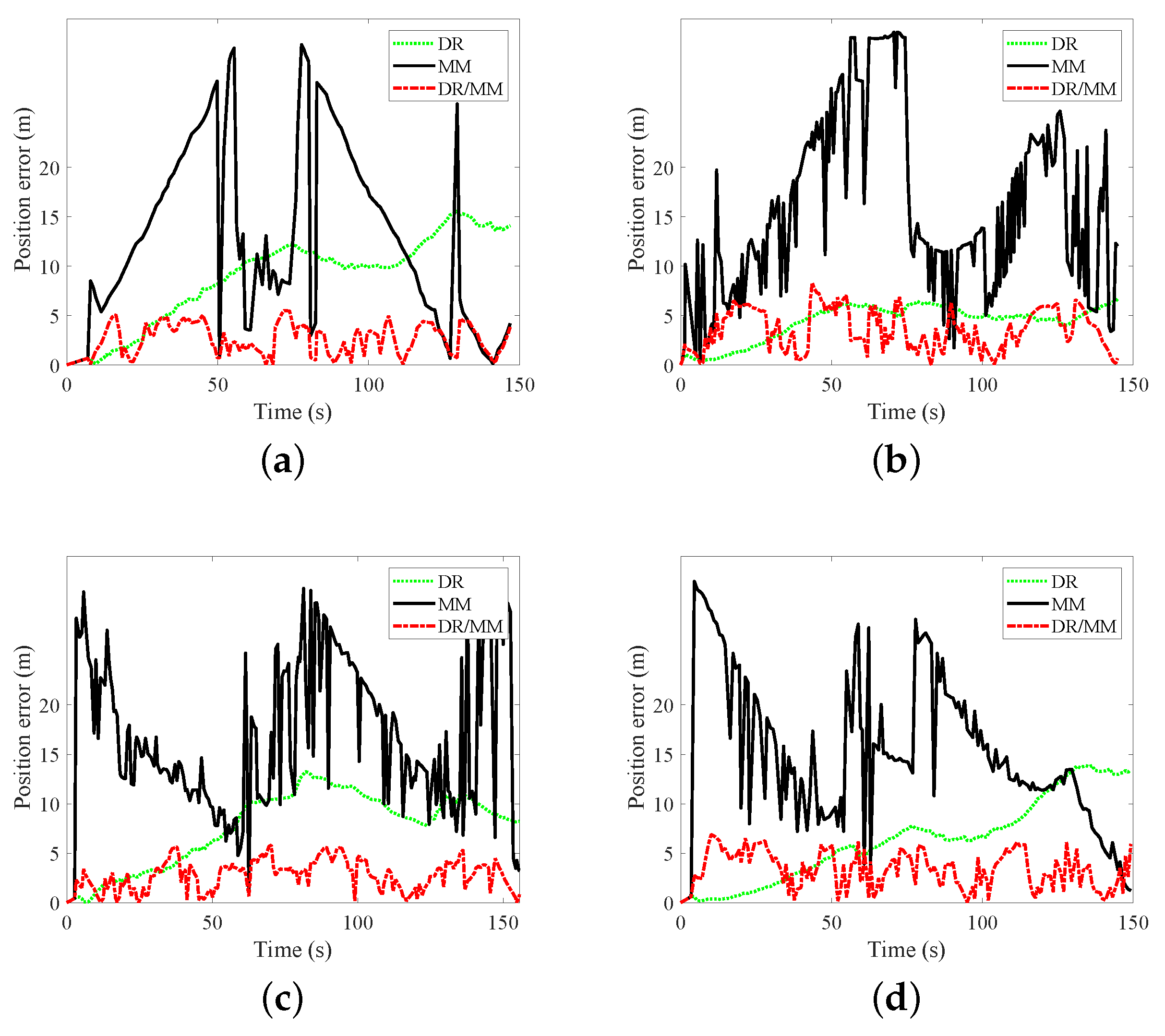
4.1. Walking Experiment in Teaching Building
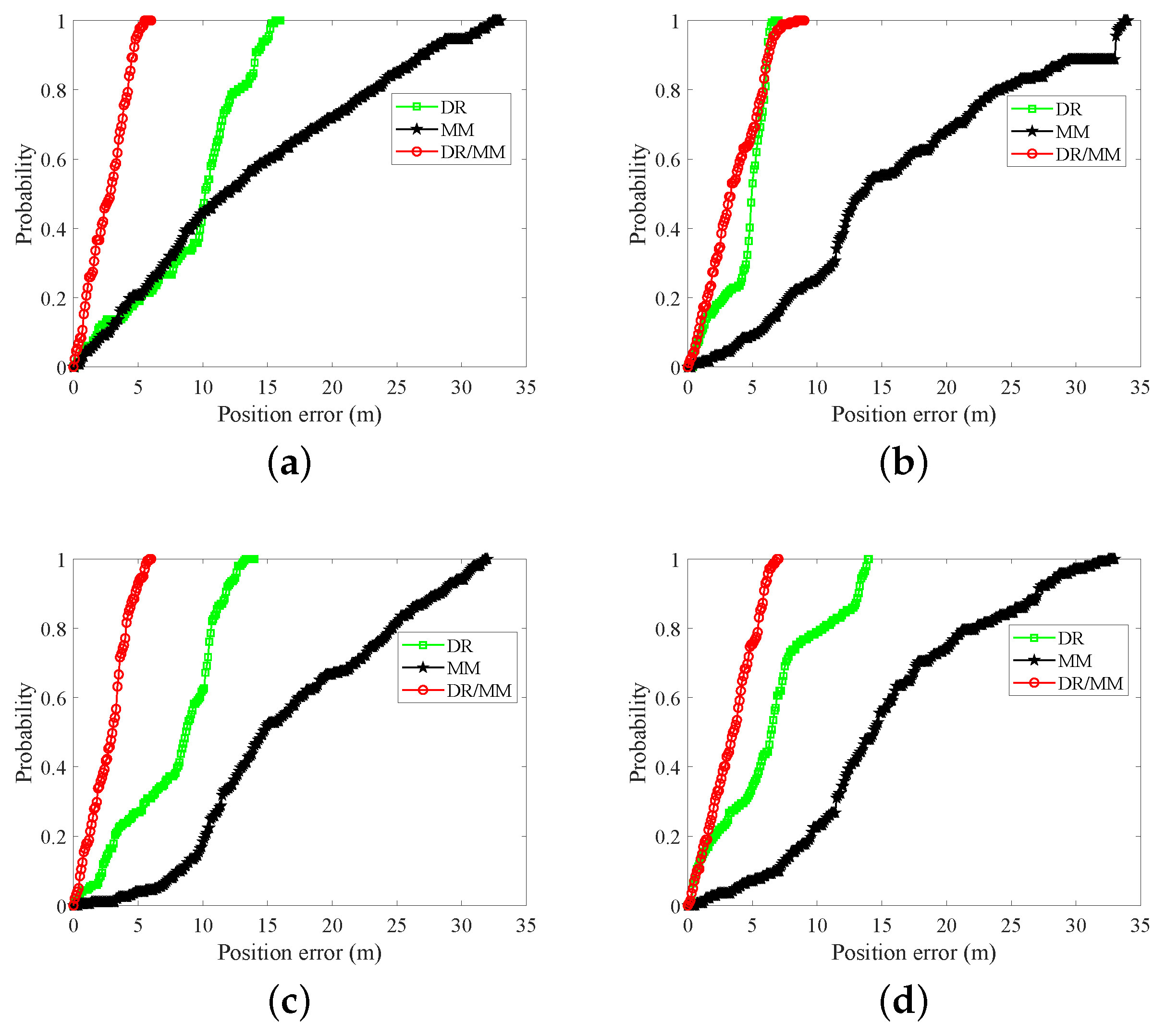
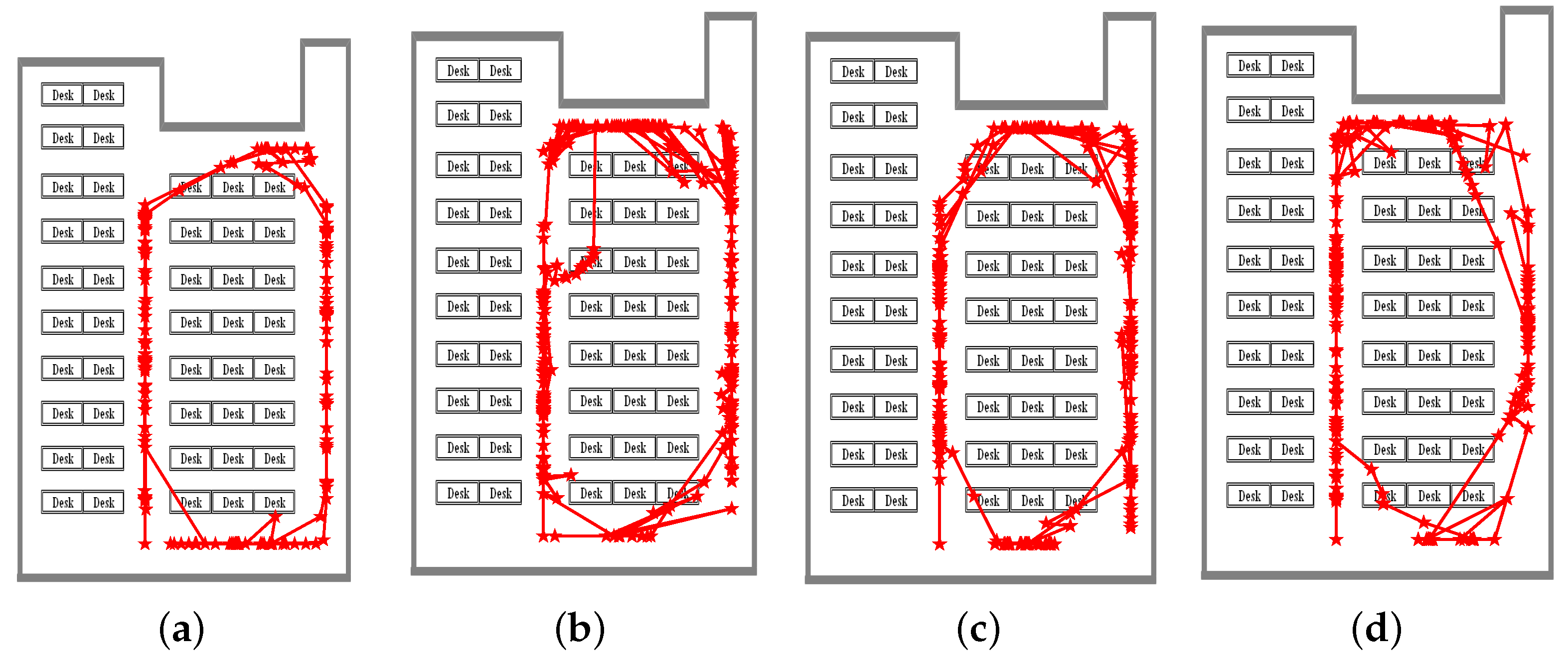
4.2. Walking Experiment in Study Room
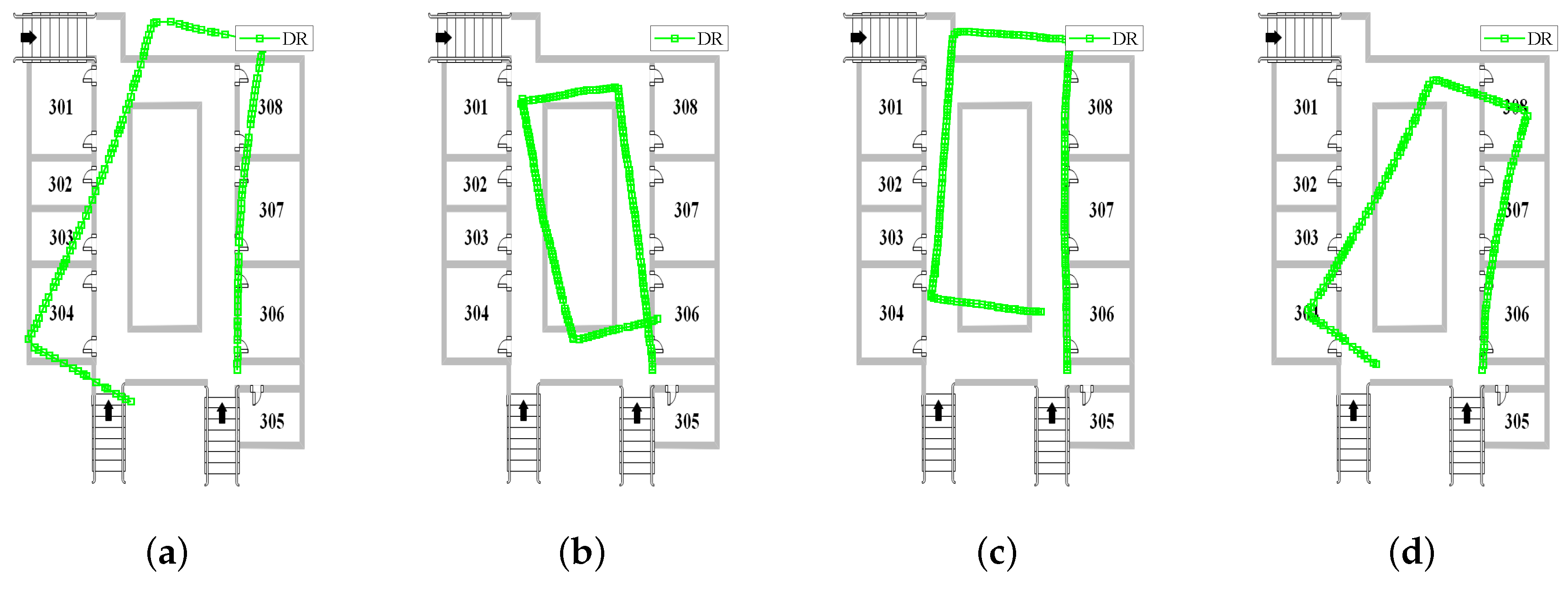
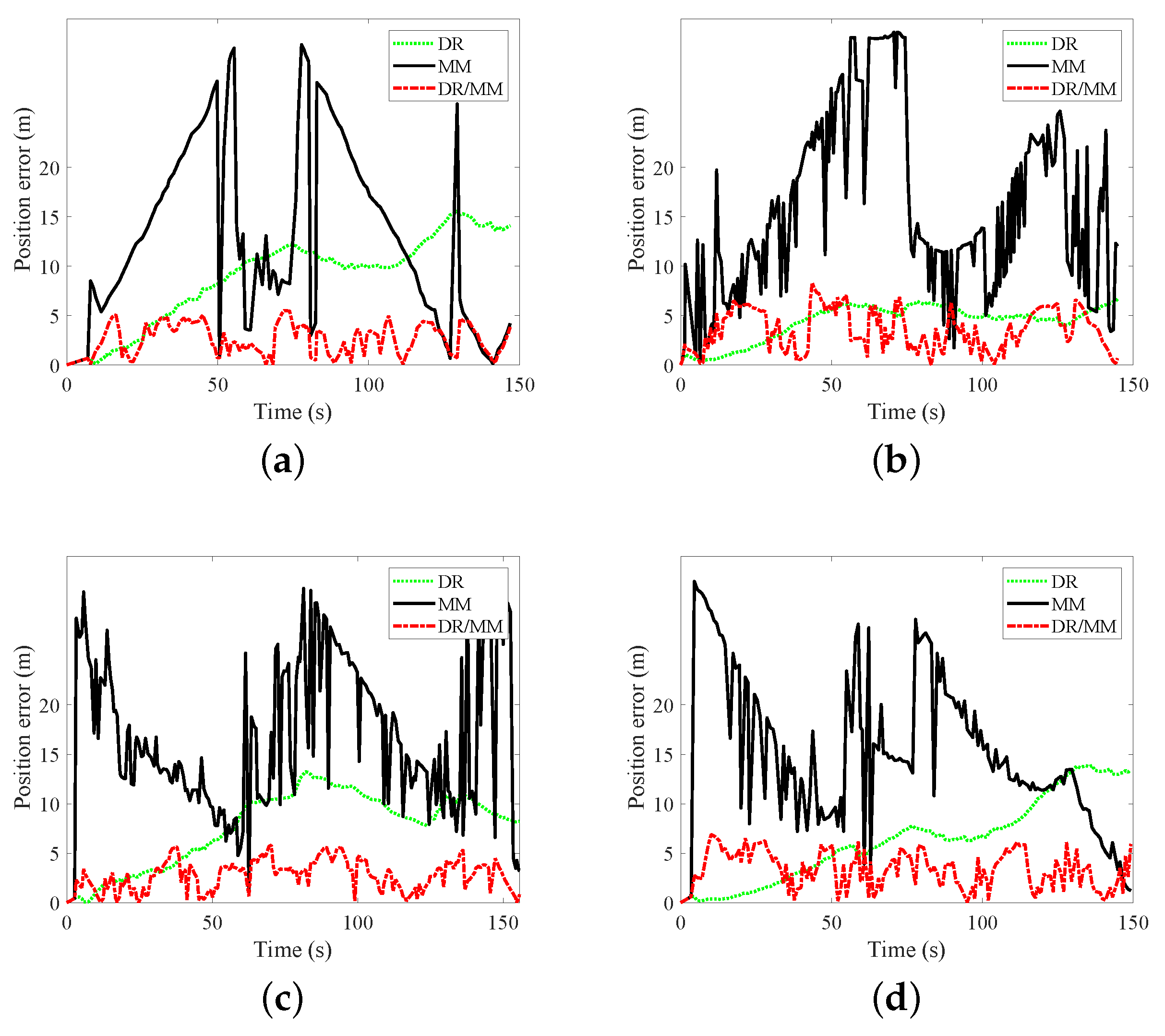
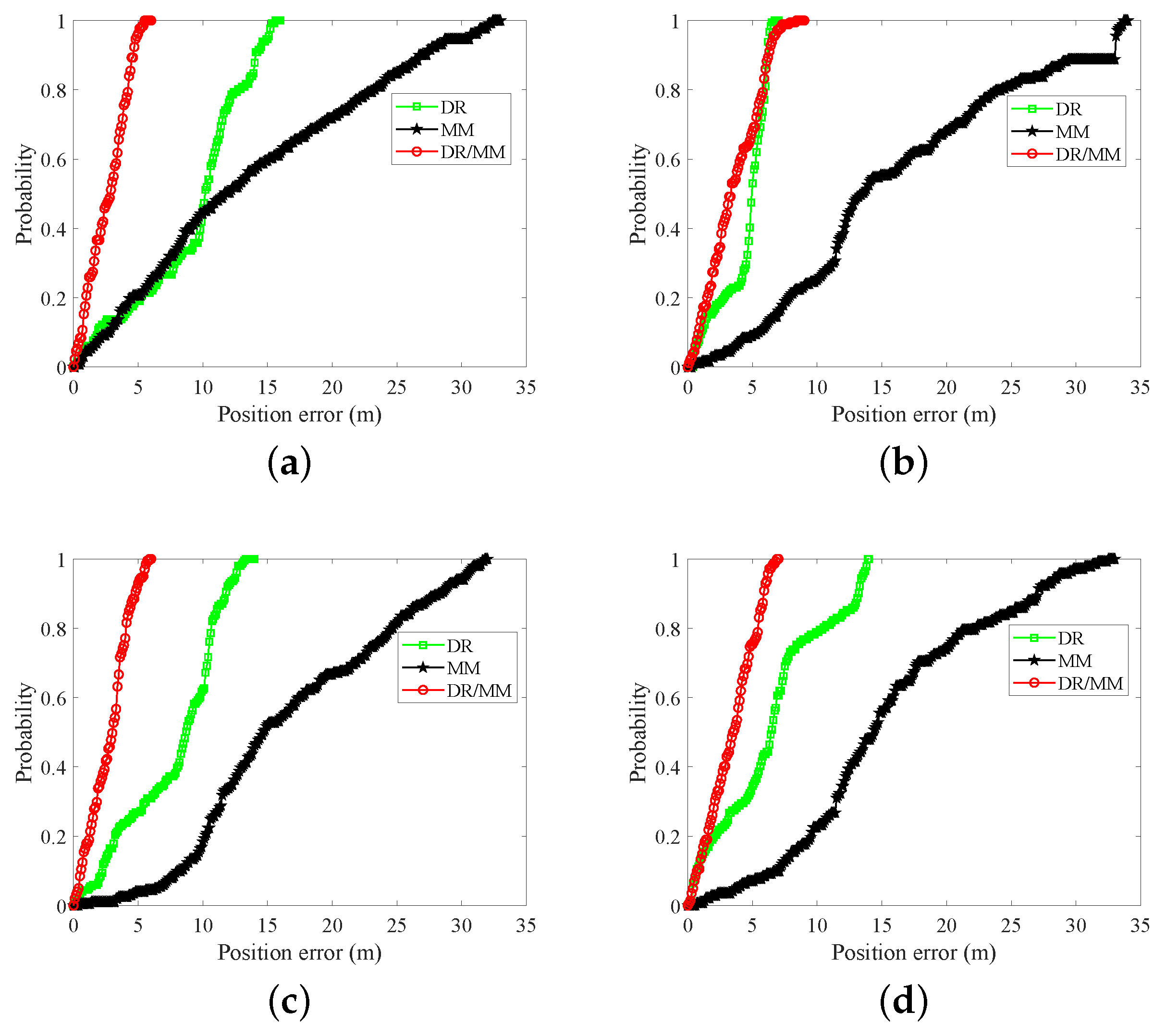
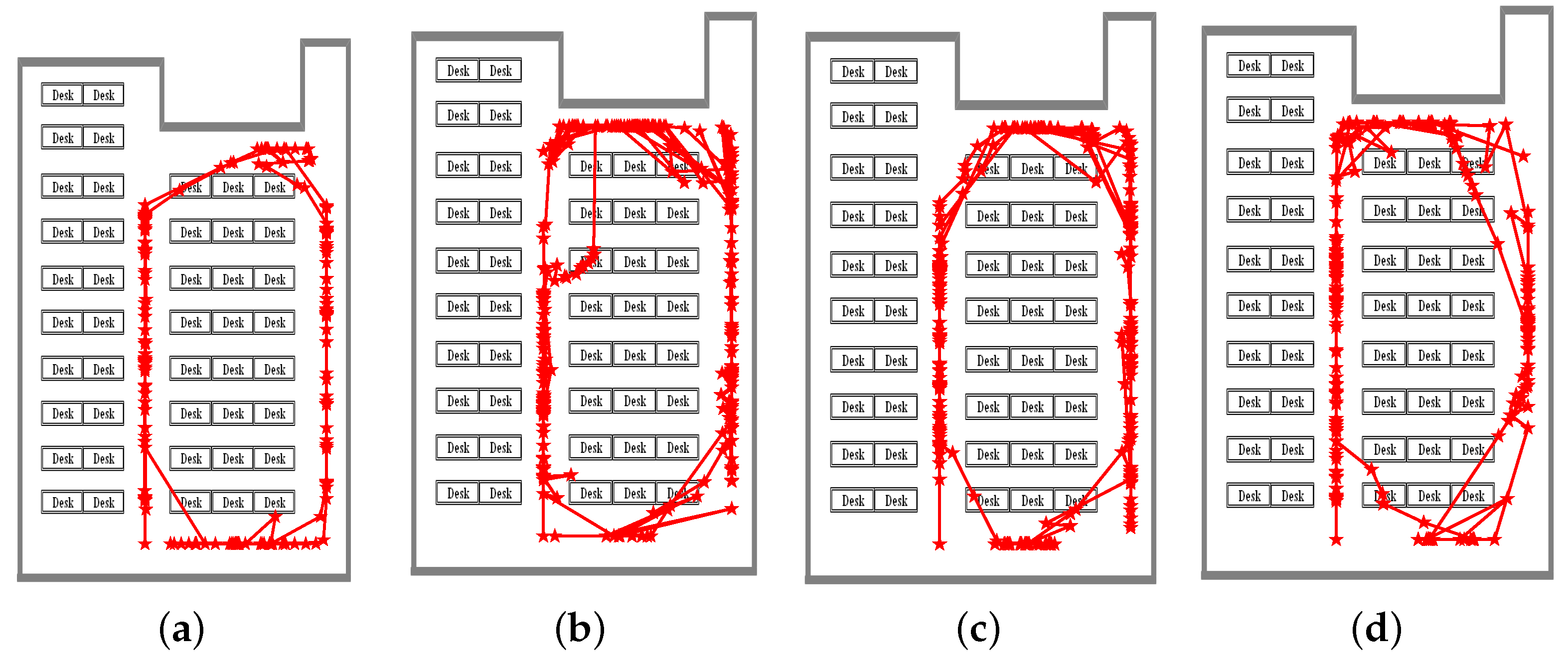
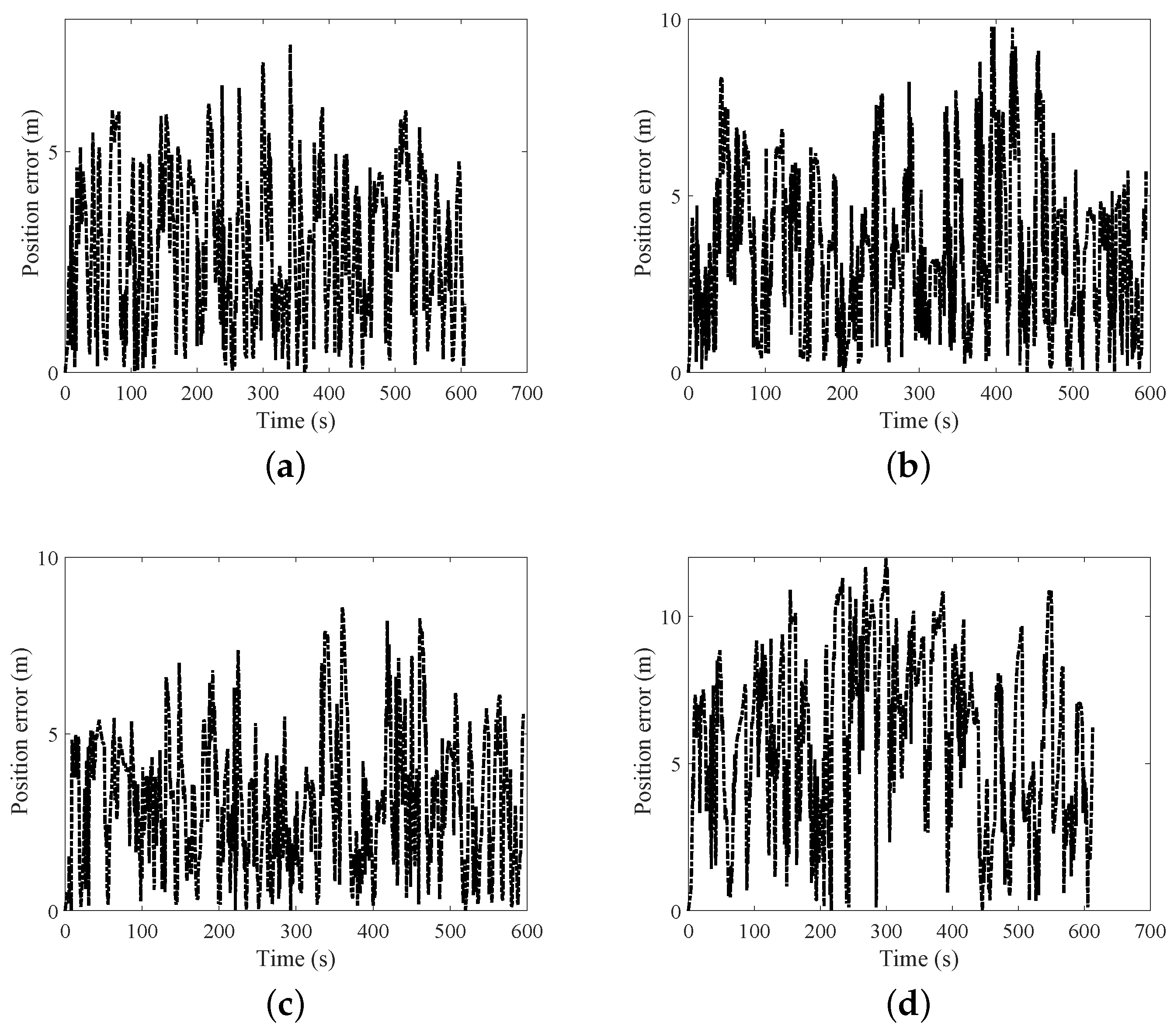
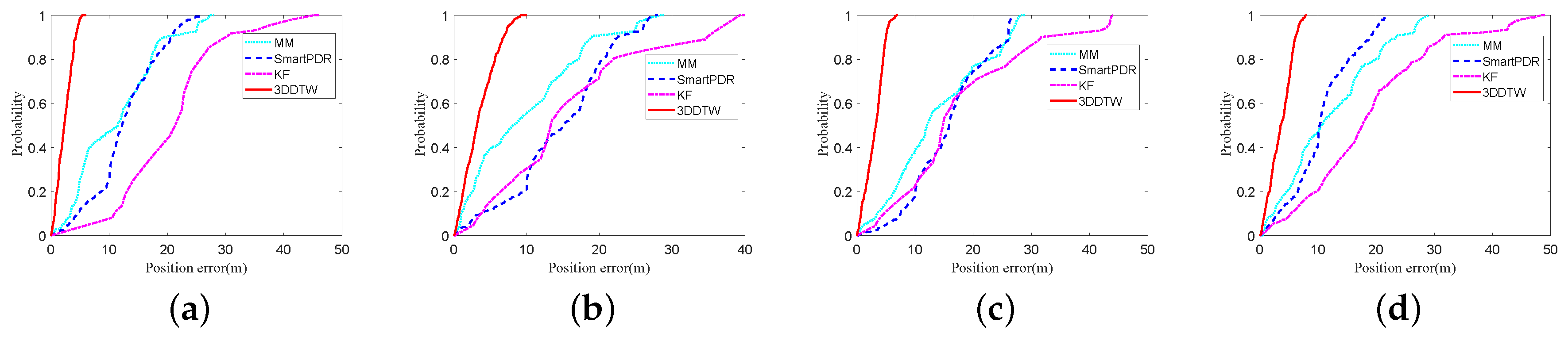
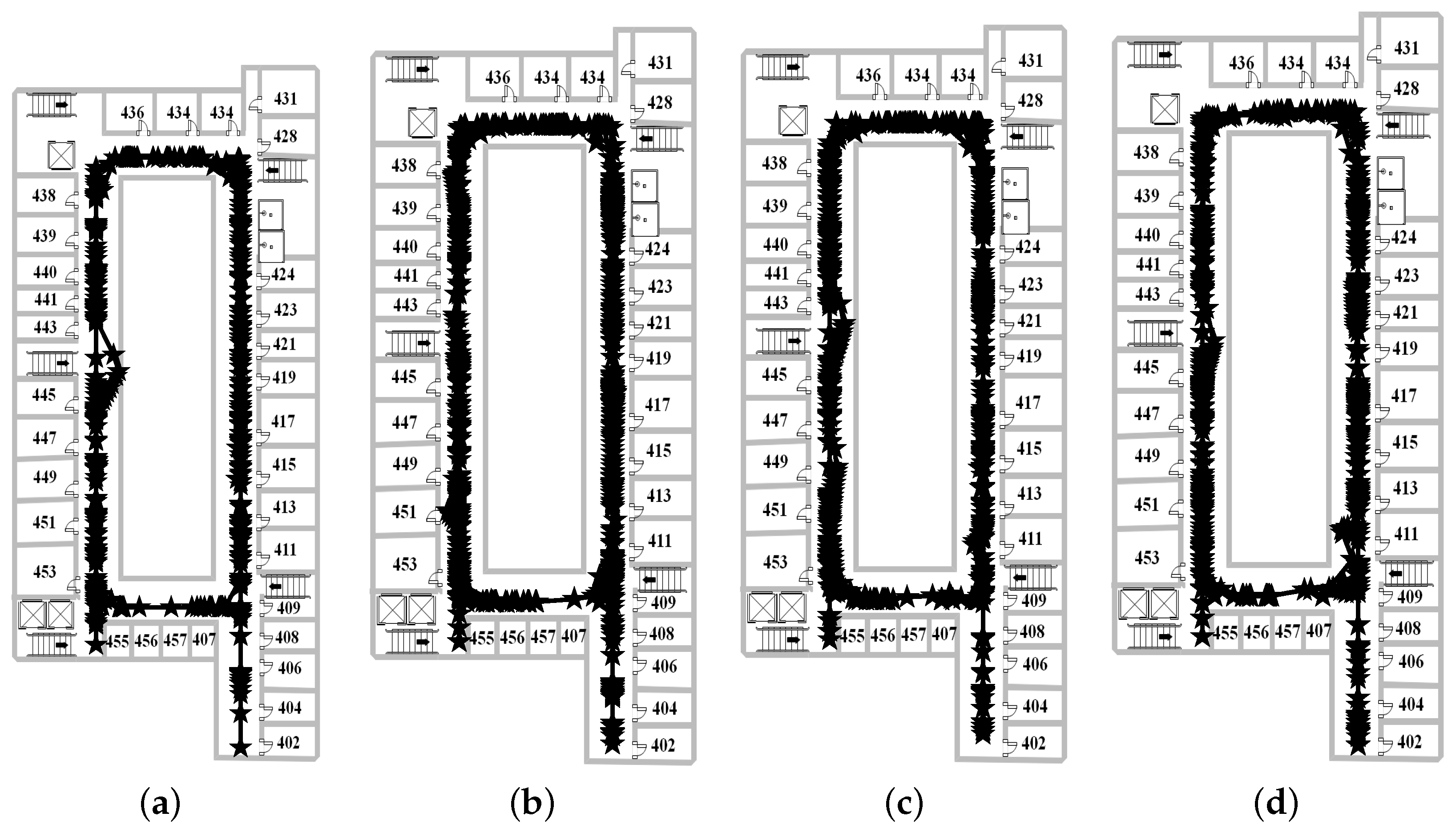
4.3. Walking Experiment in Office Building
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| DR | Dead-Reckoning |
| MM | Magnetic Matching |
| DTW | Dynamic Time Warping |
| 3DDTW | 3-Dimensional Dynamic Time Warping |
| DCM | Direct Cosin Matrix |
| CDF | Cumulative Distribution Function |
| RMSE | Root Mean Square Error |
| CEP | Circular Error Probability |
| KF | Kalman filter |
References
- Wu, X.; Deng, F.; Chen, Z. RFID 3D-LANDMARC Localization Algorithm Based on Quantum Particle Swarm Optimization. Electronics 2018, 7, 19. [Google Scholar]
- Hall, D.L.; Narayanan, R.M.; Lenzing, E.H.; Jenkins, D.M. Passive Vector Sensing for Non-Cooperative Emitter Localization in Indoor Environments. Electronics 2018, 7, 442. [Google Scholar] [CrossRef]
- Sun, T.; Zheng, L.; Peng, A.; Tang, B.; Ou, G. Building information aided Wi-Fi fingerprinting positioning system. Comput. Electr. Eng. 2018, 71, 558–568. [Google Scholar] [CrossRef]
- Zhuang, Y.; Li, Y.; Lan, H.; Syed, Z.; El-Sheimy, N. Smartphone-based WiFi access point localisation and propagation parameter estimation using crowdsourcing. Electron. Lett. 2015, 51, 1380–1382. [Google Scholar] [CrossRef]
- Han, D.; Jung, S.; Lee, M.; Yoon, G. Building a practical Wi-Fi-based indoor navigation system. IEEE Pervasive Comput. 2104, 13, 72–79. [Google Scholar]
- Yu, C.; El-Sheimy, N.; Lan, H.; Liu, Z. Map-based indoor pedestrian navigation using an auxiliary particle filter. Micromachines 2017, 8, 225. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Ou, G.; Peng, A.; Zheng, L.; Shi, J. An INS/Floor-Plan Indoor Localization System Using the Firefly Particle Filter. ISPRS Int. J. Geo-Inf. 2018, 7, 324. [Google Scholar] [CrossRef]
- Subbu, K.P.; Gozick, B.; Dantu, R. LocateMe: Magnetic-fields-based indoor localization using smartphones. ACM Trans. Intell. Syst. Technol. 2013, 4, 73. [Google Scholar] [CrossRef]
- Bachmann, E.R.; Yun, X.; Peterson, C.W. An investigation of the effects of magnetic variations on inertial/magnetic orientation sensors. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 1115–1122. [Google Scholar]
- Li, B.; Gallagher, T.; Dempster, A.G.; Rizos, C. How feasible is the use of magnetic field alone for indoor positioning? In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Sheinker, A.; Ginzburg, B.; Salomonski, N.; Frumkis, L.; Kaplan, B.Z.; Moldwin, M.B. A method for indoor navigation based on magnetic beacons using smartphones and tablets. Measurement 2106, 81, 197–209. [Google Scholar] [CrossRef]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lv, J. MaLoc: A practical magnetic fingerprinting approach to indoor localization using smartphones. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, New York, NY, USA, 13–17 September 2017; pp. 243–253. [Google Scholar]
- Abdulrahim, K.; Hide, C.; Moore, T.; Hill, C. Using constraints for shoe mounted indoor pedestrian navigation. J. Navig. 2012, 65, 15–28. [Google Scholar] [CrossRef]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A reliable and accurate indoor localization method using phone inertial sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 421–430. [Google Scholar]
- Chen, Z.; Zhu, Q.; Soh, Y.C. Smartphone inertial sensor-based indoor localization and tracking with iBeacon corrections. IEEE Trans. Ind. Inform. 2018, 12, 1458. [Google Scholar] [CrossRef]
- Chen, J.; Ou, G.; Peng, A.; Zheng, L.; Shi, J. An INS/WiFi Indoor Localization System Based on the Weighted Least Squares. Sensors 2016, 18, 1458. [Google Scholar] [CrossRef] [PubMed]
- Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU. In Proceedings of the 2010 7th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 11–12 March 2010; pp. 135–143. [Google Scholar]
- Chung, H.Y.; Hou, C.C.; Chen, Y.S. Indoor intelligent mobile robot localization using fuzzy compensation and Kalman filter to fuse the data of gyroscope and magnetometer. IEEE Trans. Ind. Eelectron. 2015, 62, 6436–6447. [Google Scholar] [CrossRef]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lu, J. A reliability-augmented particle filter for magnetic fingerprinting based indoor localization on smartphone. IEEE Trans. Mob. Comput. 2016, 15, 1877–1892. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhou, Q.; Niu, X.; El-Sheimy, N. A hybrid WiFi/magnetic matching/PDR approach for indoor navigation with smartphone sensors. IEEE Commun. Lett. 2016, 20, 169–172. [Google Scholar] [CrossRef]
- Tkhorenko, M.Y.; Pavlov, B.V.; Karshakov, E.V.; Volkovitsky, A.K. On integration of a strapdown inertial navigation system with modern magnetic sensors. In Proceedings of the 2018 25th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), St. Petersburg, Russia, 28–30 May 2018; pp. 1–4. [Google Scholar]
- Poulose, A.; Eyobu, O.S.; Han, D.S. An Indoor Position-Estimation Algorithm Using Smartphone IMU Sensor Data. IEEE Access 2019, 99, 1. [Google Scholar] [CrossRef]
- Klipp, K.; Rosé, H.; Willaredt, J.; Sawade, O.; Radusch, I. Rotation-Invariant Magnetic Features for Inertial Indoor-Localization. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–10. [Google Scholar]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. Self-Contained Indoor Pedestrian Navigation Using Smartphone Sensors and Magnetic Features. IEEE Sens. J. 2016, 16, 7173–7182. [Google Scholar] [CrossRef]
- Shin, E.H. Estimation Techniques for Low-Cost Inertial Navigation; UCGE Report; UCGE: Bursa, Turkey, 2005. [Google Scholar]
- Zhang, M.; Wen, Y.; Chen, J.; Yang, X.; Gao, R.; Zhao, H. Pedestrian dead-reckoning indoor localization based on OS-ELM. IEEE Access 2018, 6, 6116–6129. [Google Scholar] [CrossRef]
- Huang, C.; Zhang, G.; Jiang, Z.; Li, C.; Wang, Y.; Wang, X. Smartphone-based indoor position and orientation tracking fusing inertial and magnetic sensing. In Proceedings of the 2014 International Symposium on Wireless Personal Multimedia Communications (WPMC), Sydney, NSW, Australia, 7–10 September 2014; pp. 215–220. [Google Scholar]
- Huang, C.; He, S.; Jiang, Z.; Li, C.; Wang, Y.; Wang, X. Indoor positioning system based on improved PDR and magnetic calibration using smartphone. In Proceedings of the 2014 IEEE 25th Annual International Symposium on the Personal, Indoor, and Mobile Radio Communication (PIMRC), Washington, DC, USA, 2–5 September 2014; pp. 2099–2103. [Google Scholar]
- Davidson, P.; Piché, R. A survey of selected indoor positioning methods for smartphones. IEEE Commun. Surv. Tutor. 2017, 19, 1347–1370. [Google Scholar] [CrossRef]
- Zheng, L.X.; Wu, Z.H.; Zhou, W.C.; Weng, S.L.; Zheng, H.R. A Smartphone Based Hand-Held Indoor Positioning System. In Frontier Computing; Springer: Singapore, 2016; pp. 639–650. [Google Scholar]
- Subbu, K.P.; Gozick, B.; Dantu, R. Indoor localization through dynamic time warping. In Proceedings of the 2011 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Anchorage, AK, USA, 9–12 October 2011; pp. 1639–1644. [Google Scholar]
- Wang, Q.; Luo, H.; Zhao, F.; Shao, W. An indoor self-localization algorithm using the calibration of the online magnetic fingerprints and indoor landmarks. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Simon, D.; Chia, T.L. Kalman filtering with state equality constraints. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 128–136. [Google Scholar] [CrossRef]
- Kang, W.; Han, Y. SmartPDR: Smartphone-based pedestrian dead reckoning for indoor localization. IEEE Sens. J. 2015, 15, 2096–2916. [Google Scholar] [CrossRef]
- Zheng, L.; Zhou, W.; Tang, W.; Zheng, X.; Peng, A.; Zheng, H. A 3D indoor positioning system based on low-cost MEMS sensors. Simul. Model. Pract. Theory 2016, 65, 45–56. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motion Gestures | Error | The Average Error | RMSE | Maximum Error | CEP (75%) | CEP (95%) |
|---|---|---|---|---|---|---|
| Calling | DR | 9.23 | 10.14 | 15.53 | 11.91 | 15.05 |
| MM | 13.58 | 16.34 | 32.39 | 21.33 | 30.62 | |
| DR/MM | 2.65 | 3.04 | 5.49 | 3.89 | 4.85 | |
| Dangling | DR | 4.45 | 4.8 | 6.65 | 5.84 | 6.24 |
| MM | 16.08 | 18.46 | 33.66 | 22.23 | 33.09 | |
| DR/MM | 3.55 | 4.1 | 8.32 | 5.46 | 6.57 | |
| Handheld | DR | 7.69 | 8.5 | 13.25 | 10.48 | 12.53 |
| MM | 16.69 | 18.32 | 31.77 | 23.28 | 30.3 | |
| DR/MM | 2.76 | 3.15 | 5.8 | 3.89 | 5.4 | |
| DR | 6.43 | 7.62 | 13.87 | 8.38 | 13.49 | |
| MM | 15.37 | 17.05 | 32.48 | 20.25 | 28.59 | |
| DR/MM | 3.39 | 3.87 | 6.89 | 4.85 | 6.16 | |
| General | DR | 6.95 | 7.77 | 12.33 | 9.15 | 11.83 |
| MM | 15.43 | 17.54 | 32.58 | 21.77 | 30.65 | |
| DR/MM | 3.09 | 3.54 | 6.63 | 4.52 | 5.75 |
| Motion Gestures | Error | The Average Error | RMSE | Maximum Error | CEP (75%) | CEP (95%) |
|---|---|---|---|---|---|---|
| Calling | MM | 12.64 | 13.83 | 25.52 | 16.54 | 22.12 |
| SmartPDR | 20.38 | 22.03 | 45.01 | 24.19 | 37.04 | |
| KF | 11.17 | 13.17 | 27.34 | 16.66 | 25.15 | |
| 3DDTW | 2.34 | 2.7 | 5.24 | 3.4 | 4.62 | |
| Dangling | MM | 14.43 | 16 | 27.47 | 19.45 | 26.06 |
| SmartPDR | 15.66 | 18.68 | 39.29 | 20.3 | 36.95 | |
| KF | 9.66 | 12.23 | 28.13 | 15.18 | 25.06 | |
| 3DDTW | 3.48 | 4.16 | 9.12 | 5.21 | 7.4 | |
| Handheld | MM | 15.72 | 16.99 | 26.79 | 20.33 | 26.12 |
| SmartPDR | 17.53 | 20.61 | 43.83 | 23.81 | 43.05 | |
| KF | 13.64 | 15.83 | 28.11 | 19.5 | 27.08 | |
| 3DDTW | 3.05 | 3.44 | 6.75 | 4.33 | 5.41 | |
| MM | 10.63 | 11.88 | 21.88 | 14.05 | 20.24 | |
| SmartPDR | 18.63 | 21.55 | 48.41 | 24.88 | 42.78 | |
| KF | 11.96 | 14.3 | 28.9 | 17.2 | 26.78 | |
| 3DDTW | 3.6 | 4.11 | 7.84 | 5.24 | 6.67 | |
| General | MM | 13.36 | 14.68 | 25.42 | 17.59 | 23.64 |
| SmartPDR | 18.05 | 20.72 | 44.14 | 23.3 | 39.96 | |
| KF | 11.61 | 13.88 | 28.12 | 17.14 | 26.02 | |
| 3DDTW | 3.12 | 3.6 | 7.23 | 4.55 | 6.03 |
| Motion Gestures | The Average Error | RMSE | Maximum Error | CEP (75%) | CEP (95%) |
|---|---|---|---|---|---|
| Calling | 2.8 | 3.26 | 7.42 | 4.12 | 5.6 |
| Dangling | 3.47 | 4.12 | 9.79 | 4.93 | 7.5 |
| Handheld | 3.1 | 3.63 | 8.61 | 4.35 | 6.48 |
| 5.91 | 6.62 | 11.96 | 8.28 | 10.57 | |
| General | 3.82 | 4.41 | 9.45 | 5.42 | 7.54 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Ou, G.; Peng, A.; Zheng, L.; Shi, J. A Hybrid Dead Reckon System Based on 3-Dimensional Dynamic Time Warping. Electronics 2019, 8, 185. https://doi.org/10.3390/electronics8020185
Chen J, Ou G, Peng A, Zheng L, Shi J. A Hybrid Dead Reckon System Based on 3-Dimensional Dynamic Time Warping. Electronics. 2019; 8(2):185. https://doi.org/10.3390/electronics8020185
Chicago/Turabian StyleChen, Jian, Gang Ou, Ao Peng, Lingxiang Zheng, and Jianghong Shi. 2019. "A Hybrid Dead Reckon System Based on 3-Dimensional Dynamic Time Warping" Electronics 8, no. 2: 185. https://doi.org/10.3390/electronics8020185
APA StyleChen, J., Ou, G., Peng, A., Zheng, L., & Shi, J. (2019). A Hybrid Dead Reckon System Based on 3-Dimensional Dynamic Time Warping. Electronics, 8(2), 185. https://doi.org/10.3390/electronics8020185