Trapezoidal Motion Profile to Suppress Residual Vibration of Flexible Object Moved by Robot



Abstract
1. Introduction
2. Related Research
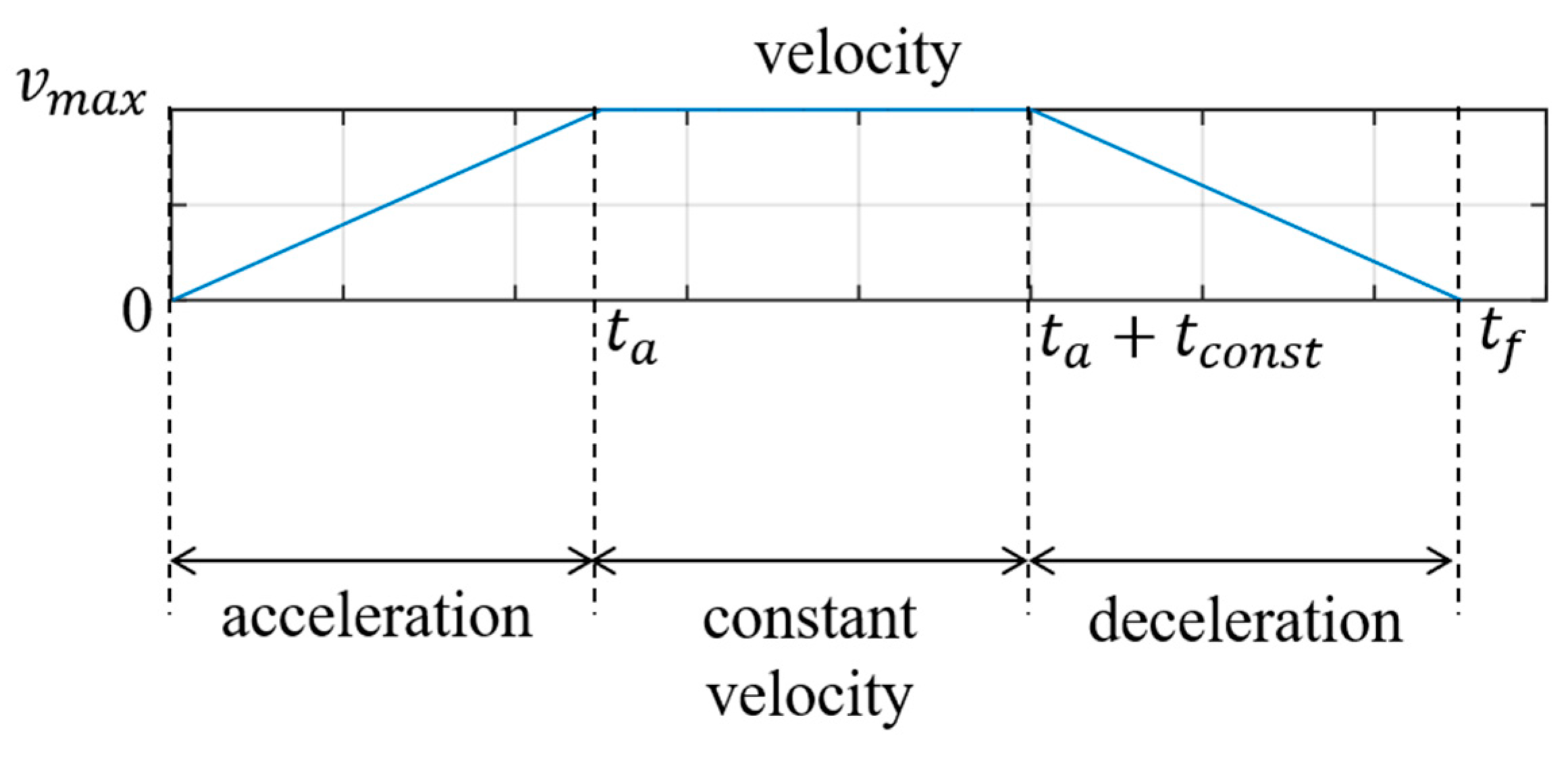
3. Design of Trapezoidal Velocity Profile
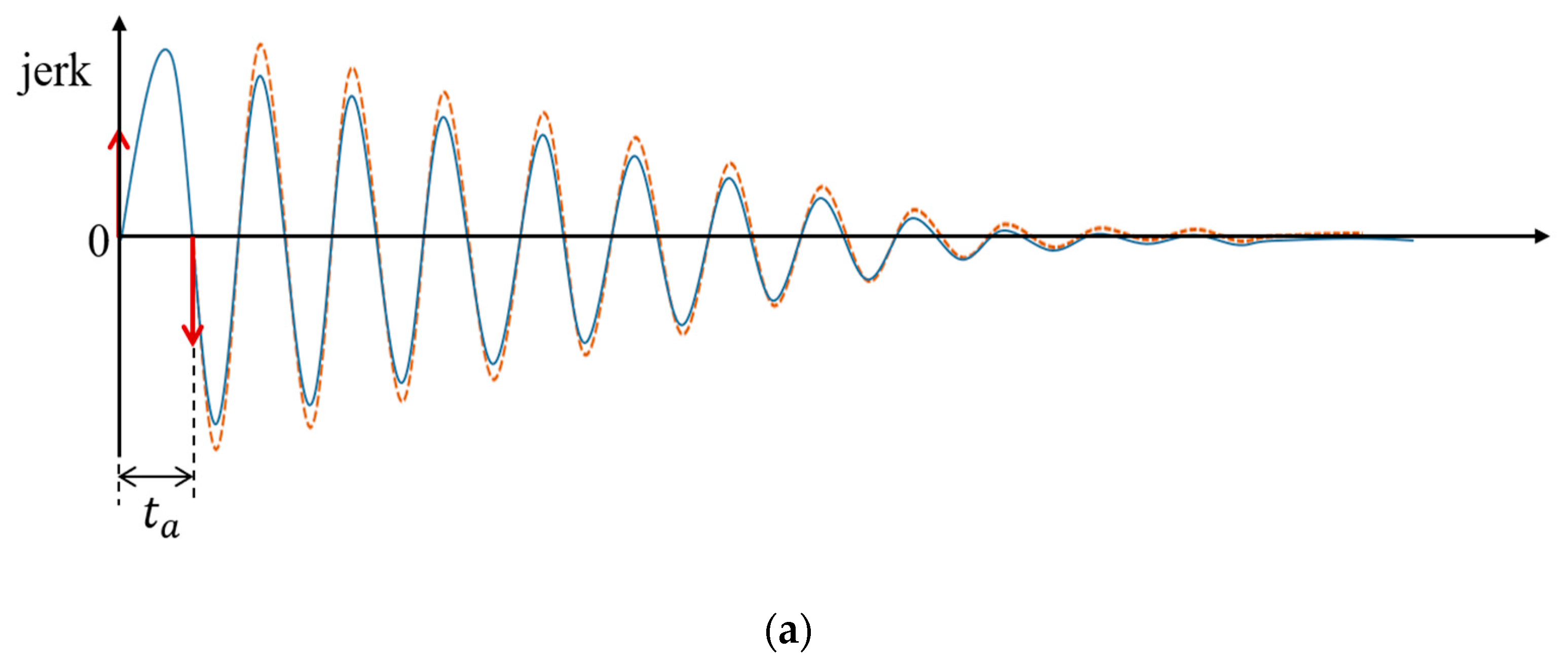
4. Profiles for Reducing Residual Vibration
5. Experiments
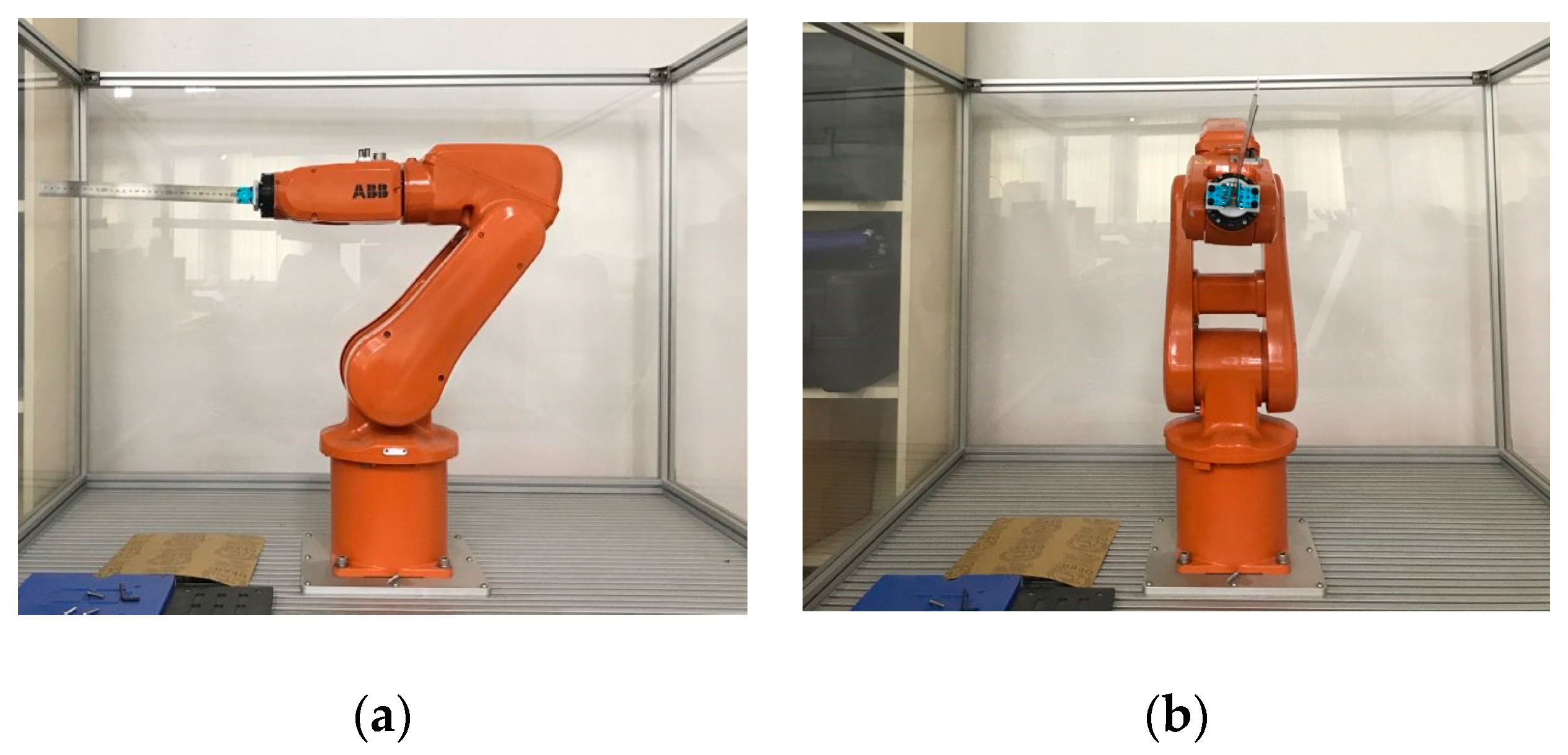
5.1. Experimental Setup and Target Task
5.2. Constant Configuration
5.3. Changing Configuration
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lu, Y. Industry 4.0: A survey on technologies, applications, and open research issues. J. Ind. Inf. Integr. 2017, 6, 1–10. [Google Scholar] [CrossRef]
- Kim, J.W.; Park, F.C.; Kim, M.S. Geometric design tools for stiffness and vibration analysis of robotic mechanism. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), San Francisco, CA, USA, 24–28 April 2011; pp. 1942–1947. [Google Scholar]
- Dwivedy, S.K.; Eberhard, P. Dynamic analysis of flexible manipulators, a literature review. Mech. Mach. Theory 2006, 41, 749–777. [Google Scholar] [CrossRef]
- Li, H.; Le, M.D.; Gong, Z.M.; Lin, W. Motion profile design to reduce residual vibration of high-speed positioning stages. IEEE/ASME Trans. Mechatron. 2009, 14, 264–269. [Google Scholar] [CrossRef]
- Nguyen, K.D.; Ng, T.; Chen, I. On algorithms for planning S-curve motion profiles. Int. J. Adv. Robot. Syst. 2008, 5, 99–106. [Google Scholar] [CrossRef]
- Singer, N.C.; Seering, W.P. Preshaping command inputs to reduce system vibration. ASME J. Dyn. Syst. Meas. Control 1990, 112, 76–82. [Google Scholar] [CrossRef]
- ABB Robot Technical Reference Manual. Available online: https://library.abb.com/en/ (accessed on 9 November 2018).
- Mitsubishi Robot Controller Instruction Manual. Available online: http://www.mitsubishirobots.com/manuals.html (accessed on 9 November 2018).
- Denso Robot User Manuals. Available online: https://densorobotics.com/content/user_manuals/19/000535.html (accessed on 9 November 2018).
- Biagiotti, L.; Mechiorri, C. Trajectory Planning for Automatic Machines and Robots, 2nd ed.; Springer: Berlin, Germany, 2008; pp. 62–76. ISBN 978-3-540-85628-3. [Google Scholar]
- Sciavicco, L.; Siciliano, B. Modelling and Control of Robot Manipulators, 2nd ed.; Springer: London, UK, 2003; pp. 186–192. ISBN 1-85233-221-2. [Google Scholar]
- Boryga, M.; Grabos, A. Planning of manipulator motion trajectory with higher-degree polynomials use. Mech. Mach. Theory 2009, 44, 1400–1419. [Google Scholar] [CrossRef]
- Guan, Y.; Yokoi, K.; Stasse, O.; Kheddar, A. On robotic trajectory planning using polynomial interpolations. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Shatin, China, 5–9 July 2005; pp. 111–116. [Google Scholar]
- Huang, J.; Hu, P.; Wu, K.; Zeng, M. Optimal time-jerk trajectory planning for industrial robots. Mech. Mach. Theory 2018, 121, 530–544. [Google Scholar] [CrossRef]
- Perumaal, S.; Jawahar, N. Synchronized trigonometric s-curve trajectory for jerk-bounded time-optimal pick and place operation. Int. J. Robot. Autom. 2012, 27, 385–395. [Google Scholar] [CrossRef]
- Gasparetto, A.; Zanotto, V. A technique for time-jerk optimal planning of robot trajectories. Robot. Comput.-Integr. Manuf. 2008, 24, 415–426. [Google Scholar] [CrossRef]
- Park, J.; Chang, P.H.; Park, H.S.; Lee, E. Design of learning input shaping technique for residual vibration suppression in an industrial robot. IEEE/ASME Trans. Mechatron. 2006, 11, 55–65. [Google Scholar] [CrossRef]
- Mohamed, Z.; Tokhi, M.O. Command shaping techniques for vibration control of a flexible robot manipulator. Mechatronics 2004, 14, 69–90. [Google Scholar] [CrossRef]
- Singhose, W.E.; Seering, W.P.; Singer, N.C. Time-optimal negative input shapers. ASME J. Dyn. Syst. Meas. Control 1997, 119, 198–205. [Google Scholar] [CrossRef]
- Ha, C.W.; Rew, K.H.; Kim, K.S. Robust zero placement for motion control of lightly damped systems. IEEE Trans. Ind. Electron. 2013, 60, 3857–3864. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Max. Amplitude (mm) | Settling Time (s) | |||
|---|---|---|---|---|
| Case 1 | 0.063 | 0.439 | 37 | 7.75 |
| Case 2 | 0.125 | 0.375 | 5 | 0.875 |
| Case 3 | 0.187 | 0.313 | 16 | 4.375 |
| Case 4 | 0.250 | 0.250 | 2 | 0 |
| Max. Amplitude (mm) | Settling Time (s) | |||
|---|---|---|---|---|
| Case 1 | 0.063 | 0.674 | 40 | 8.375 |
| Case 2 | 0.125 | 0.550 | 2 | 0 |
| Case 3 | 0.187 | 0.462 | 22 | 5.375 |
| Case 4 | 0.250 | 0.300 | 2 | 0 |
| Distance (mm) | Max. Amplitude (mm) | Settling Time (s) | ||
|---|---|---|---|---|
| Case 1 | 0.063 | 62.5 | 55 | 11.5 |
| Case 2 | 0.125 | 125 | 3 | 0 |
| Case 3 | 0.187 | 187.5 | 17 | 7.25 |
| Case 4 | 0.250 | 250 | 5 | 1.875 |
| Max. Amplitude (mm) | Settling Time (s) | |||
|---|---|---|---|---|
| Case 1 | 0.063 | 0.362 | 26 | 7.625 |
| Case 2 | 0.125 | 0.300 | 7 | 1.5 |
| Case 3 | 0.187 | 0.238 | 10 | 5.25 |
| Case 4 | 0.250 | 0.175 | 7 | 4.875 |
| Max. Amplitude (mm) | Settling Time (s) | |||
|---|---|---|---|---|
| Case 1 | 0.063 | 0.674 | 31 | 7.25 |
| Case 2 | 0.125 | 0.550 | 3 | 0 |
| Case 3 | 0.187 | 0.426 | 19 | 5.625 |
| Case 4 | 0.250 | 0.300 | 6 | 2.625 |
| Distance (mm) | Max. Amplitude (mm) | Settling Time (s) | ||
|---|---|---|---|---|
| Case 1 | 0.063 | 62.5 | 57 | 13 |
| Case 2 | 0.125 | 125 | 3 | 0 |
| Case 3 | 0.187 | 187.5 | 19 | 10.625 |
| Case 4 | 0.250 | 250 | 5 | 5.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoon, H.J.; Chung, S.Y.; Kang, H.S.; Hwang, M.J. Trapezoidal Motion Profile to Suppress Residual Vibration of Flexible Object Moved by Robot. Electronics 2019, 8, 30. https://doi.org/10.3390/electronics8010030
Yoon HJ, Chung SY, Kang HS, Hwang MJ. Trapezoidal Motion Profile to Suppress Residual Vibration of Flexible Object Moved by Robot. Electronics. 2019; 8(1):30. https://doi.org/10.3390/electronics8010030
Chicago/Turabian StyleYoon, Hyun Joong, Seong Youb Chung, Han Sol Kang, and Myun Joong Hwang. 2019. "Trapezoidal Motion Profile to Suppress Residual Vibration of Flexible Object Moved by Robot" Electronics 8, no. 1: 30. https://doi.org/10.3390/electronics8010030
APA StyleYoon, H. J., Chung, S. Y., Kang, H. S., & Hwang, M. J. (2019). Trapezoidal Motion Profile to Suppress Residual Vibration of Flexible Object Moved by Robot. Electronics, 8(1), 30. https://doi.org/10.3390/electronics8010030