
Model-Free Predictive Current Control for an Improved Transverse-Flux Flux-Reversal Linear Motor


Abstract
1. Introduction
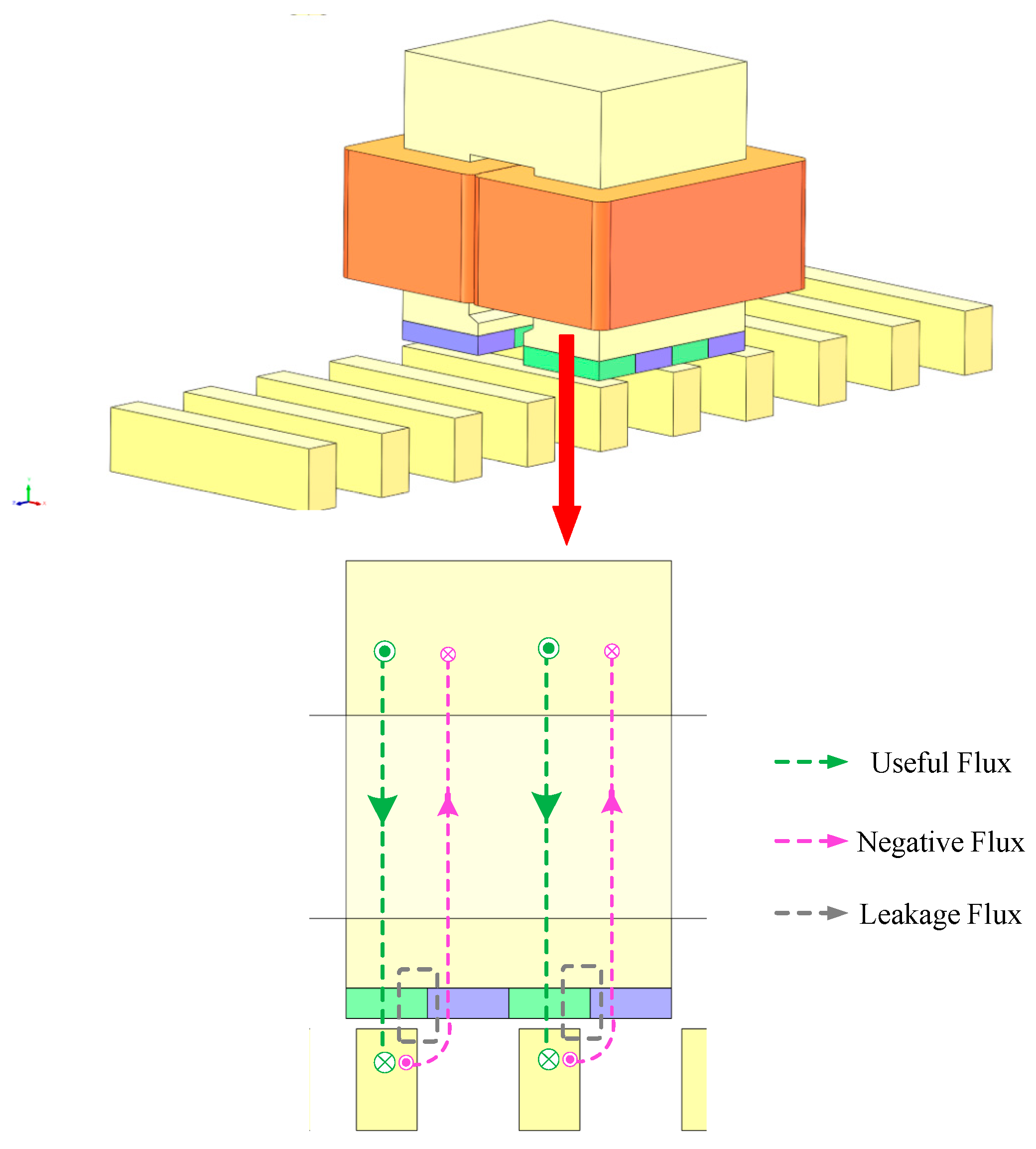
2. Thrust Enhancement Principle of the Improved TF-FRLM
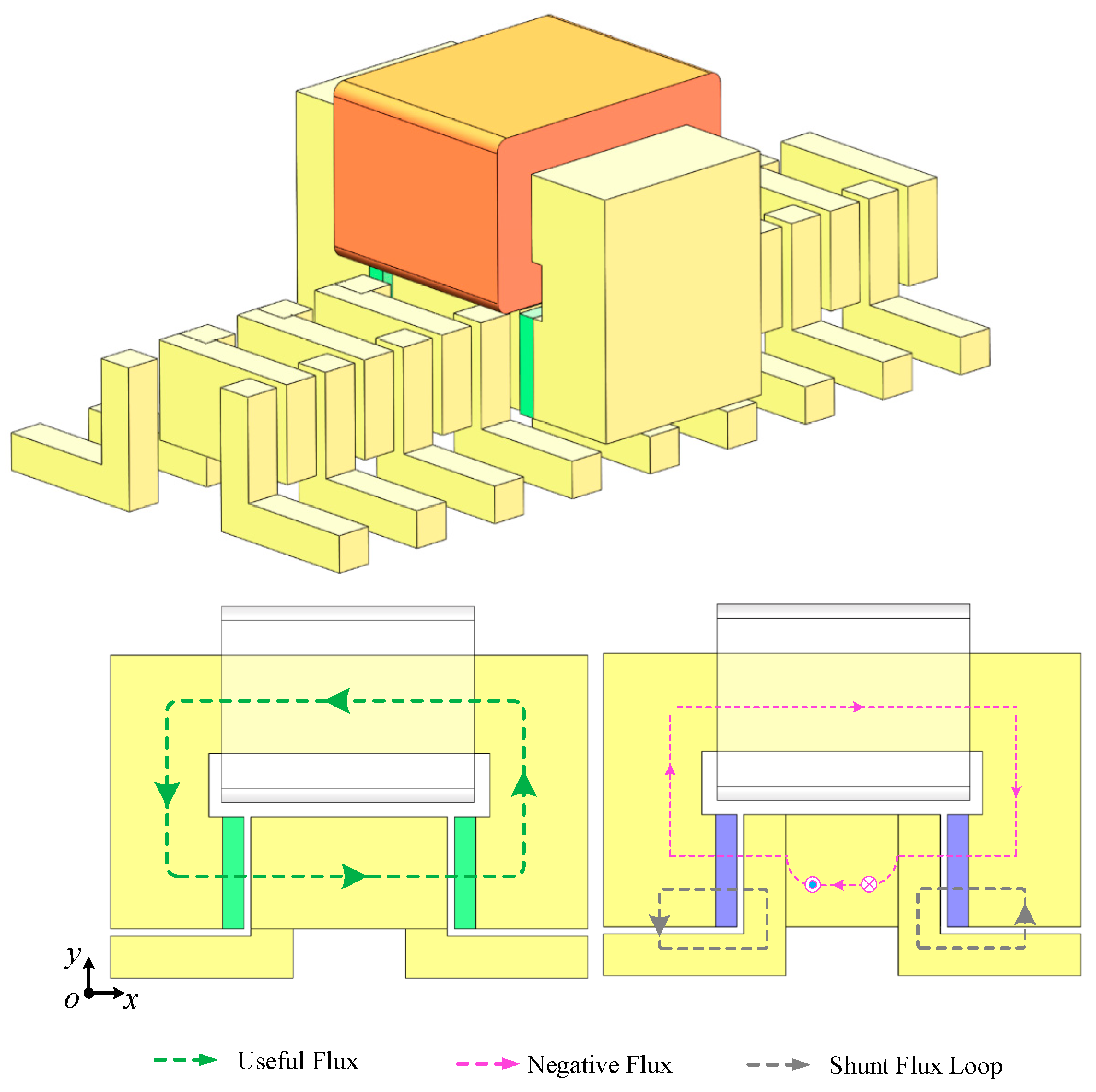
2.1. Improvement in the Motor Structure
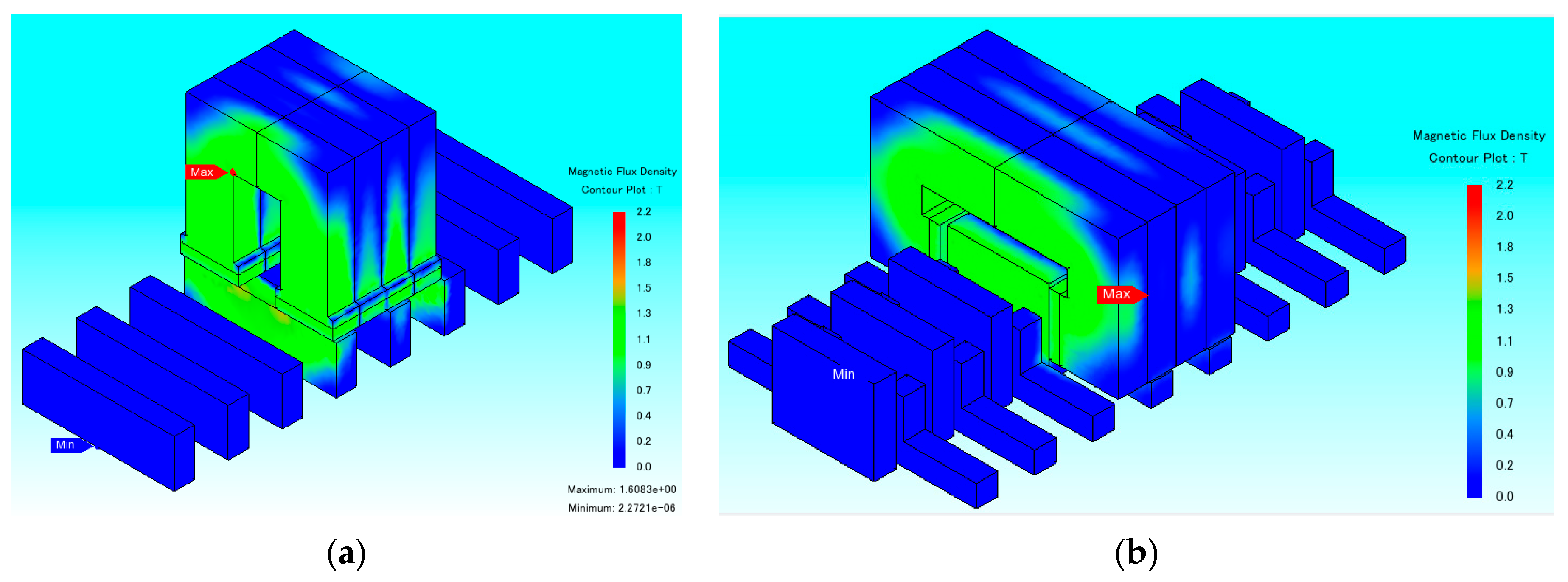
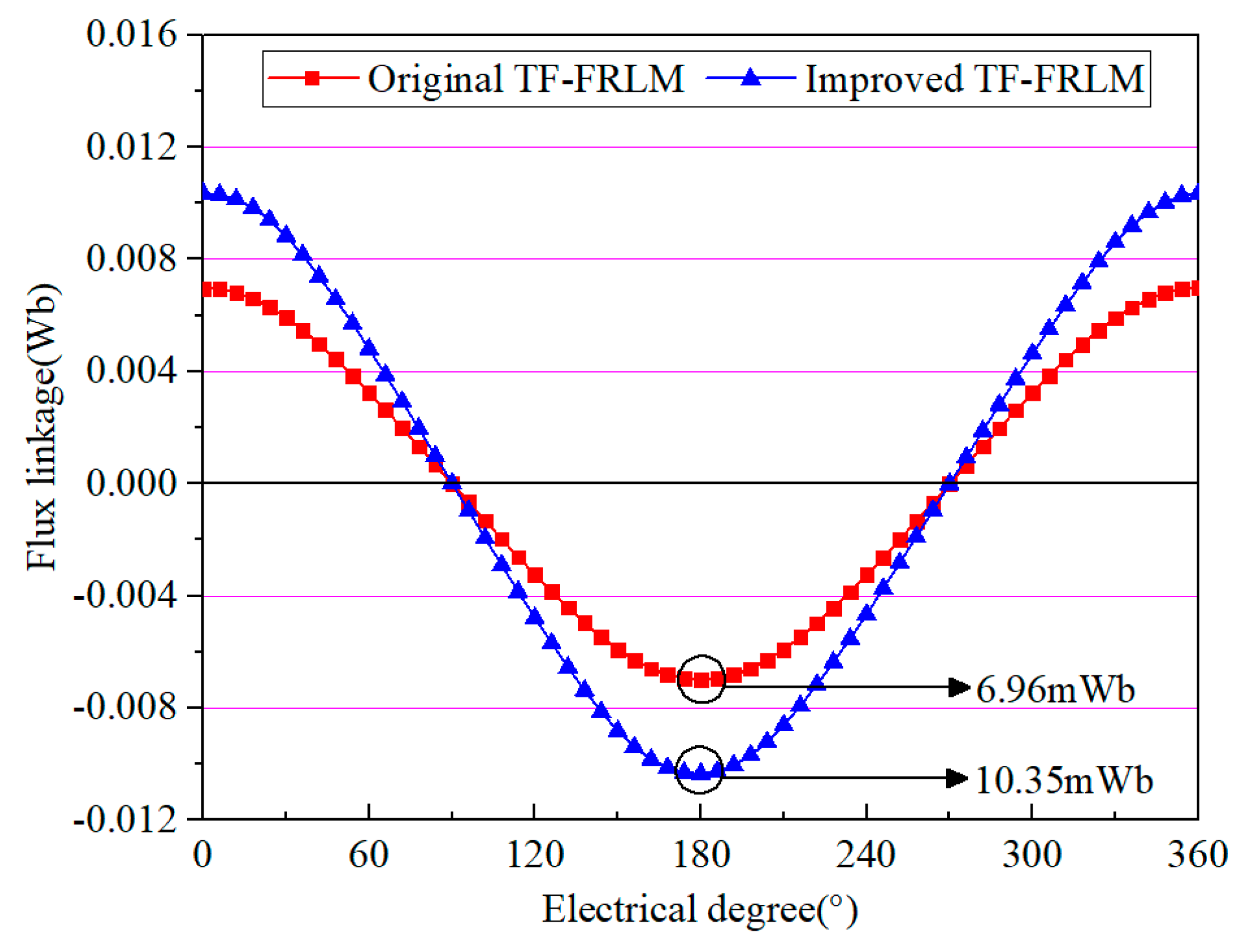
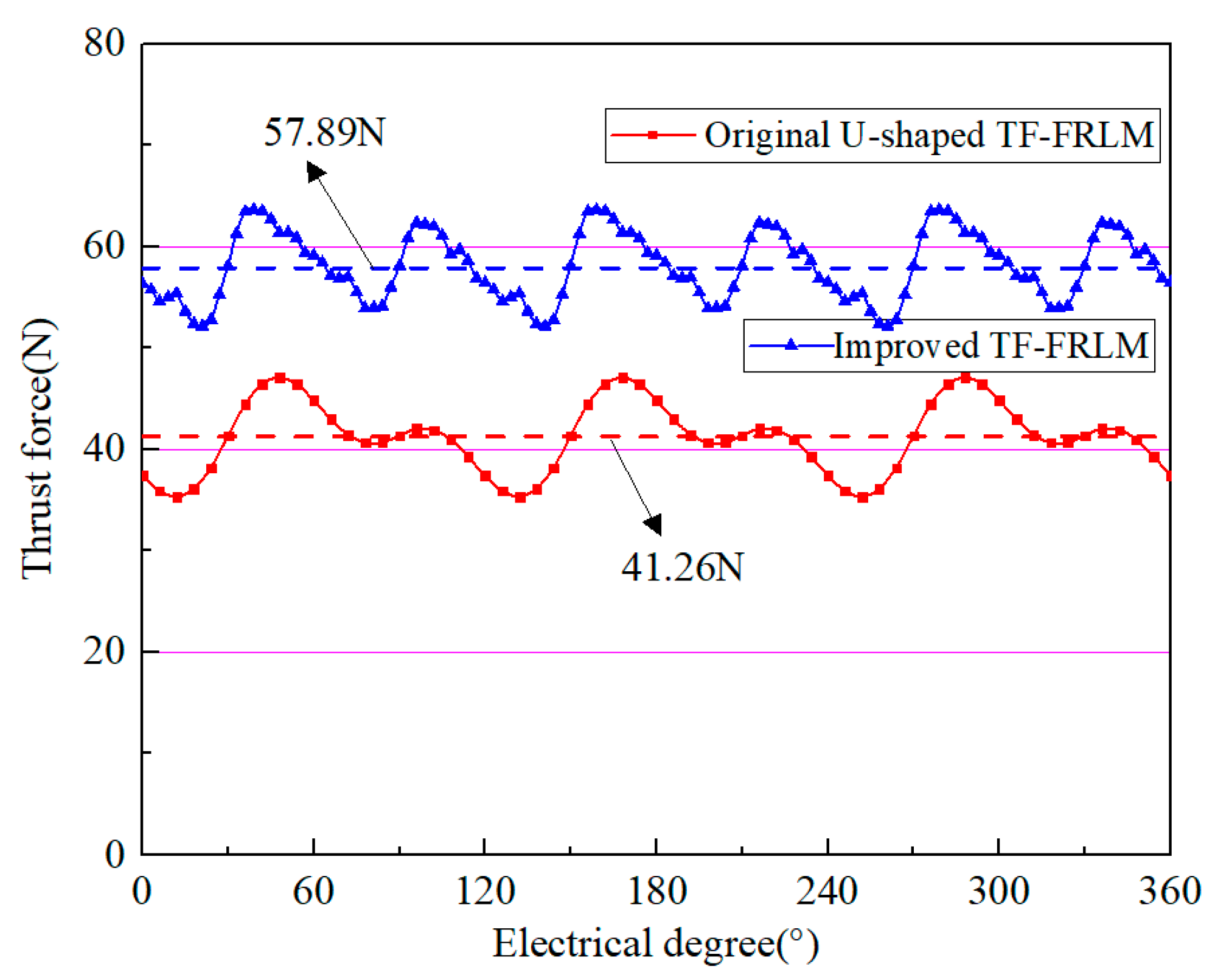
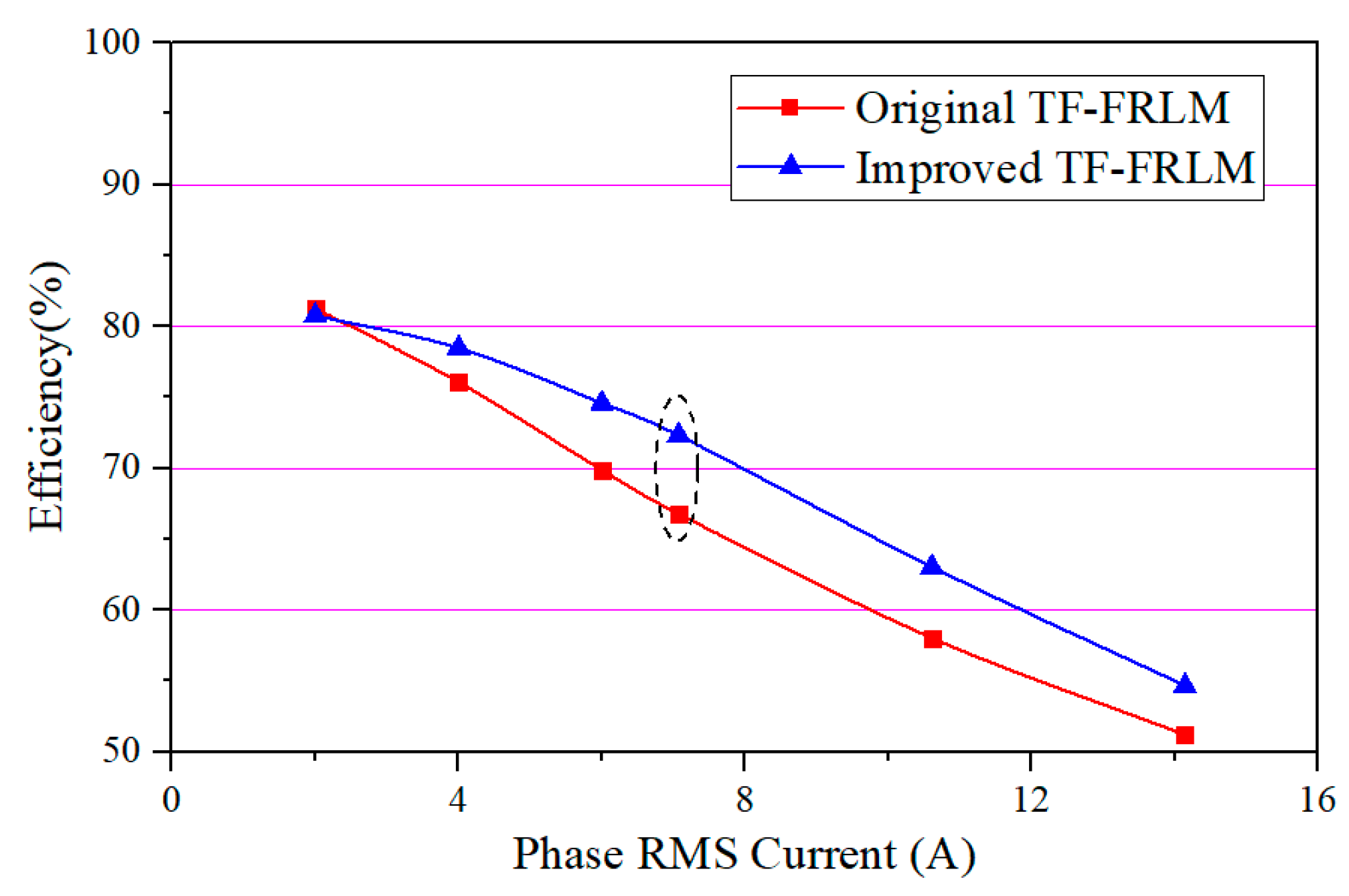
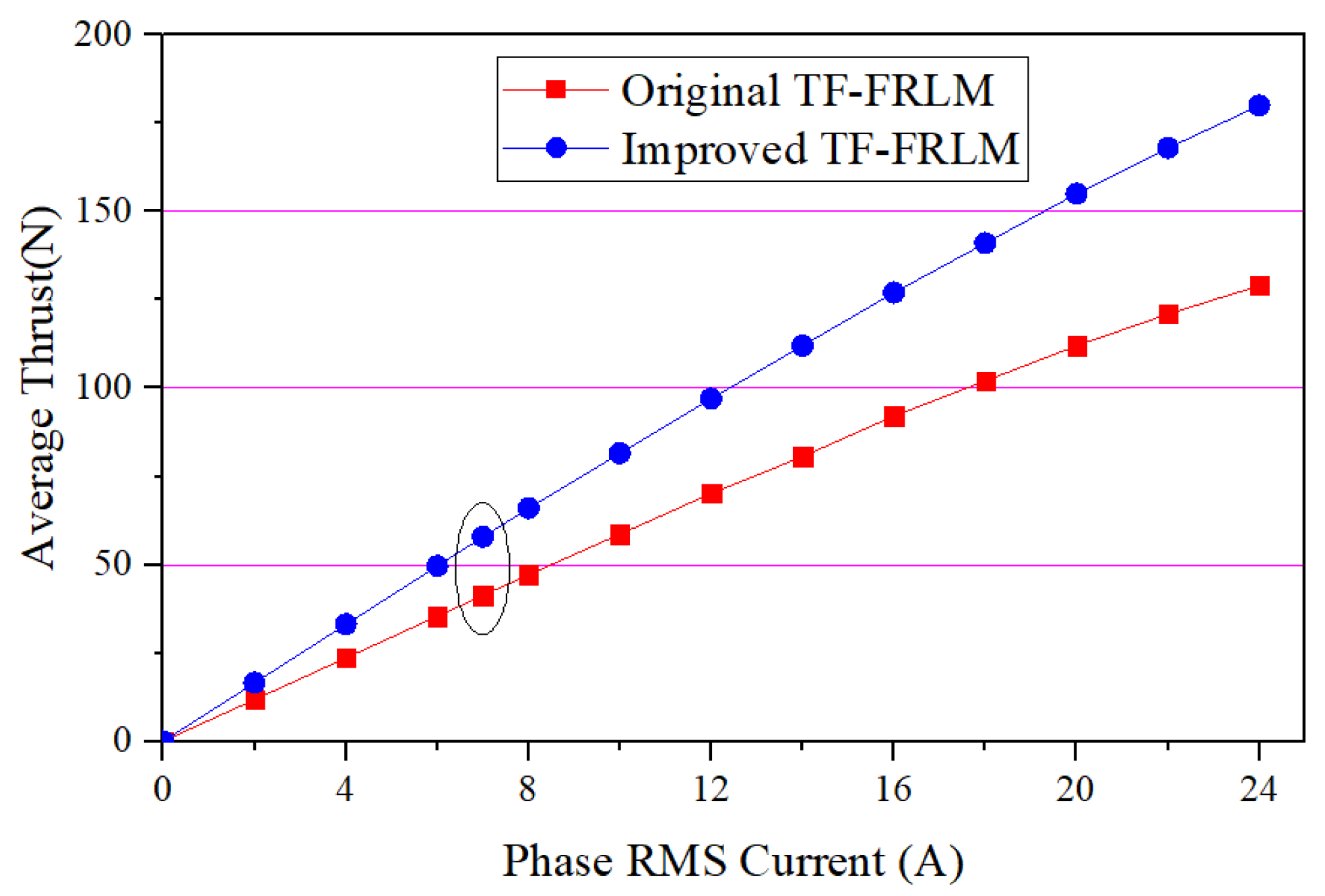
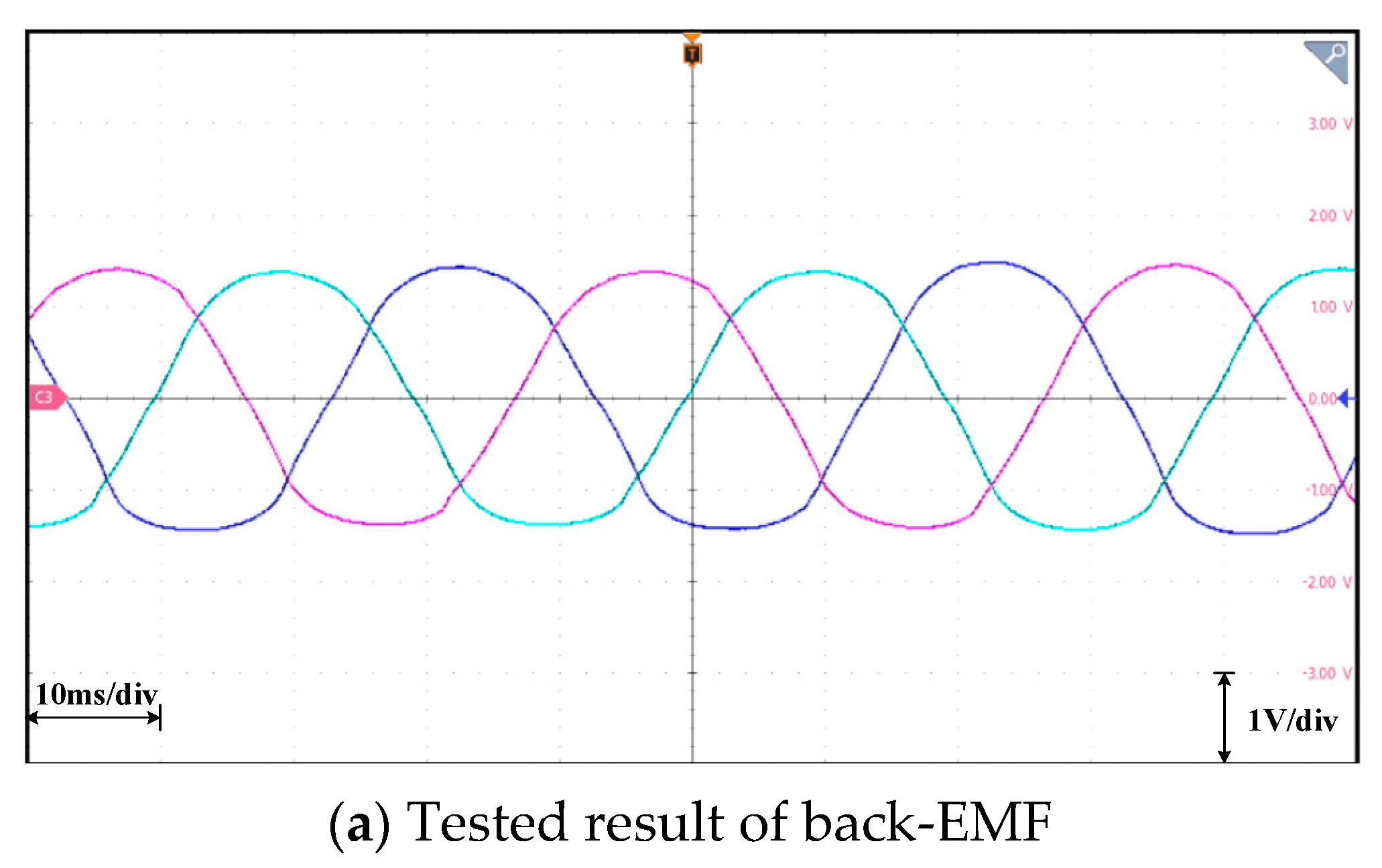
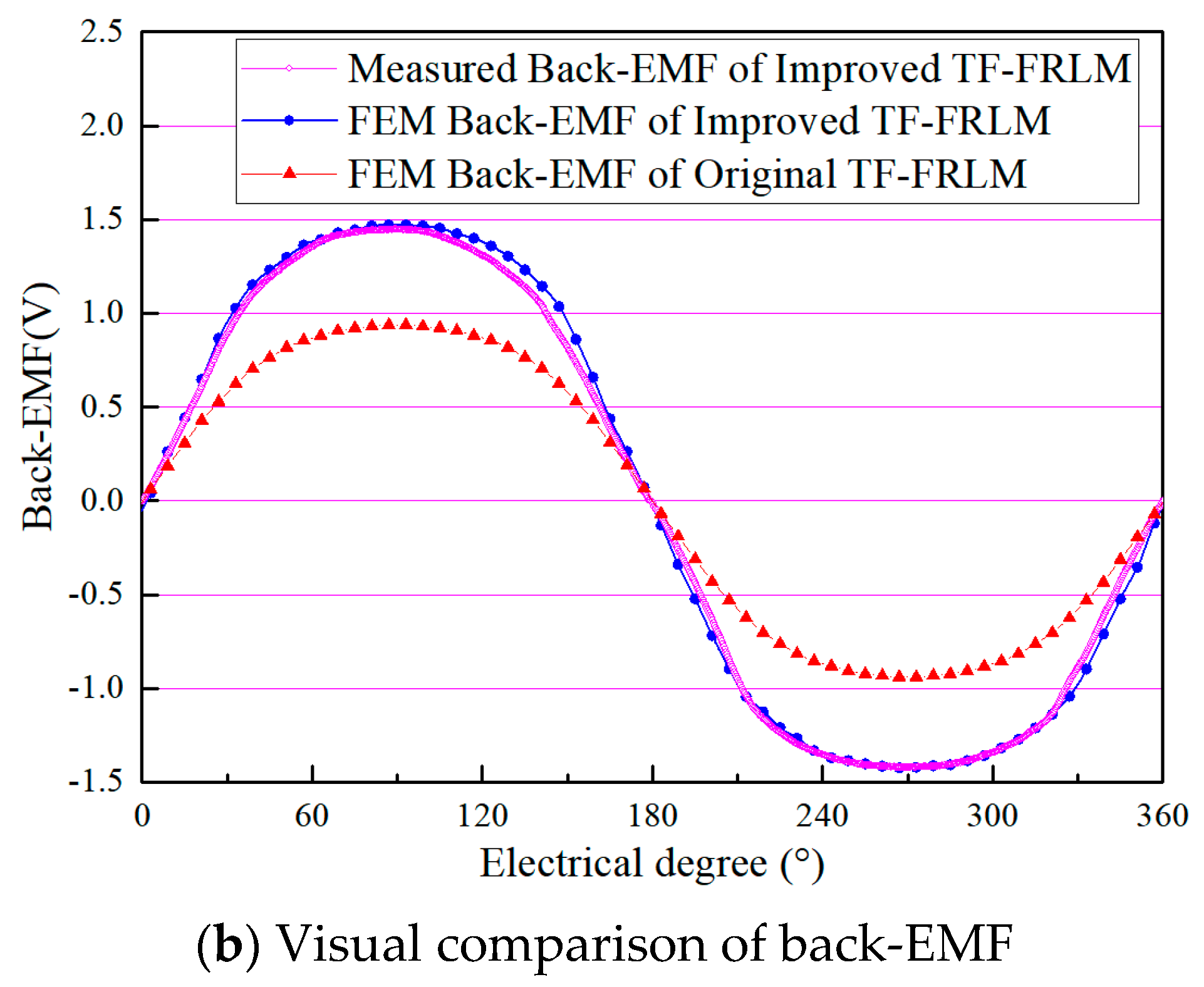
2.2. Verification of the Flux Linkage Enhancement Effect
3. MFPCC Control of TF-FRLM
3.1. Principle of the Proposed MFPCC
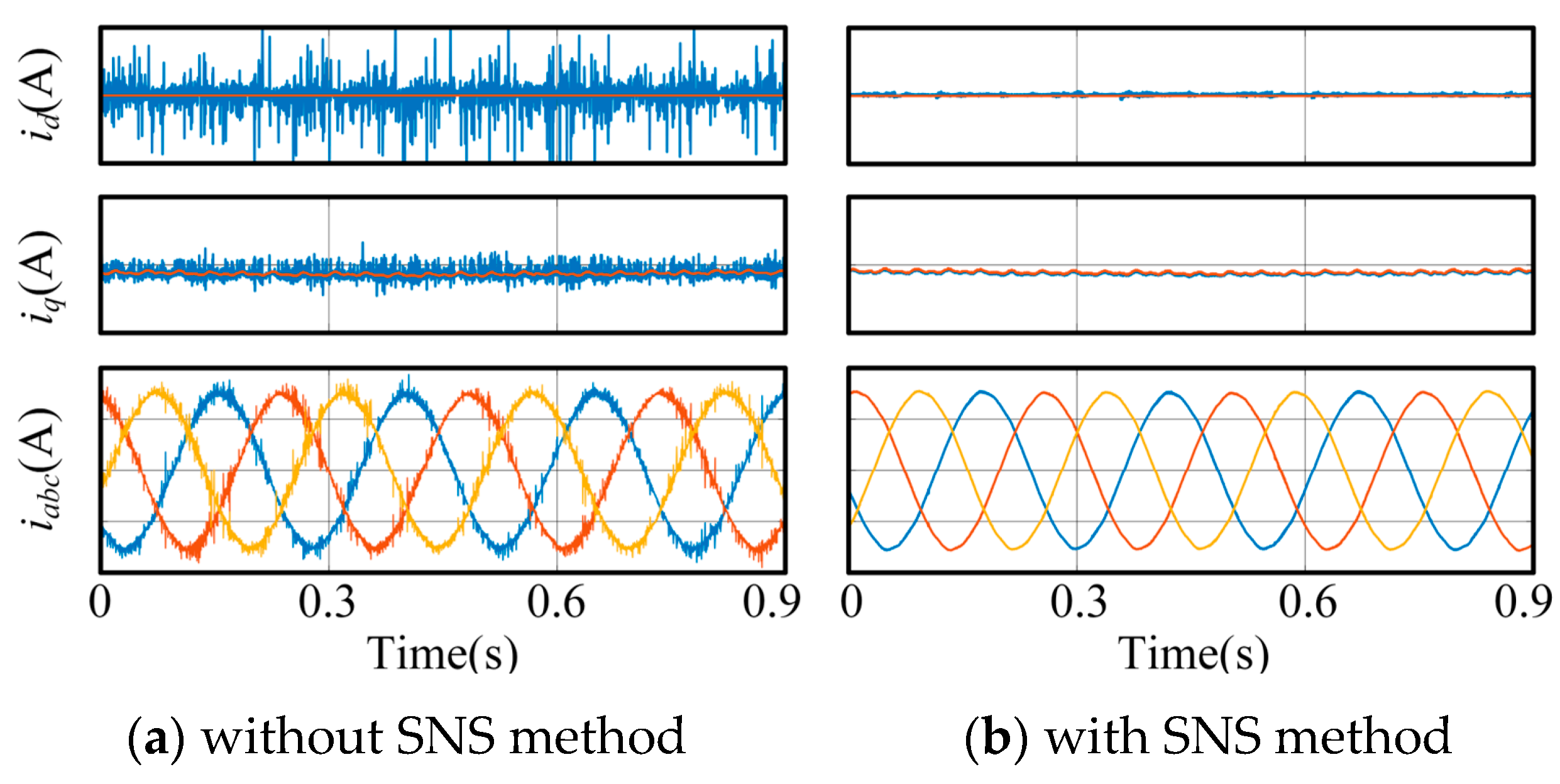
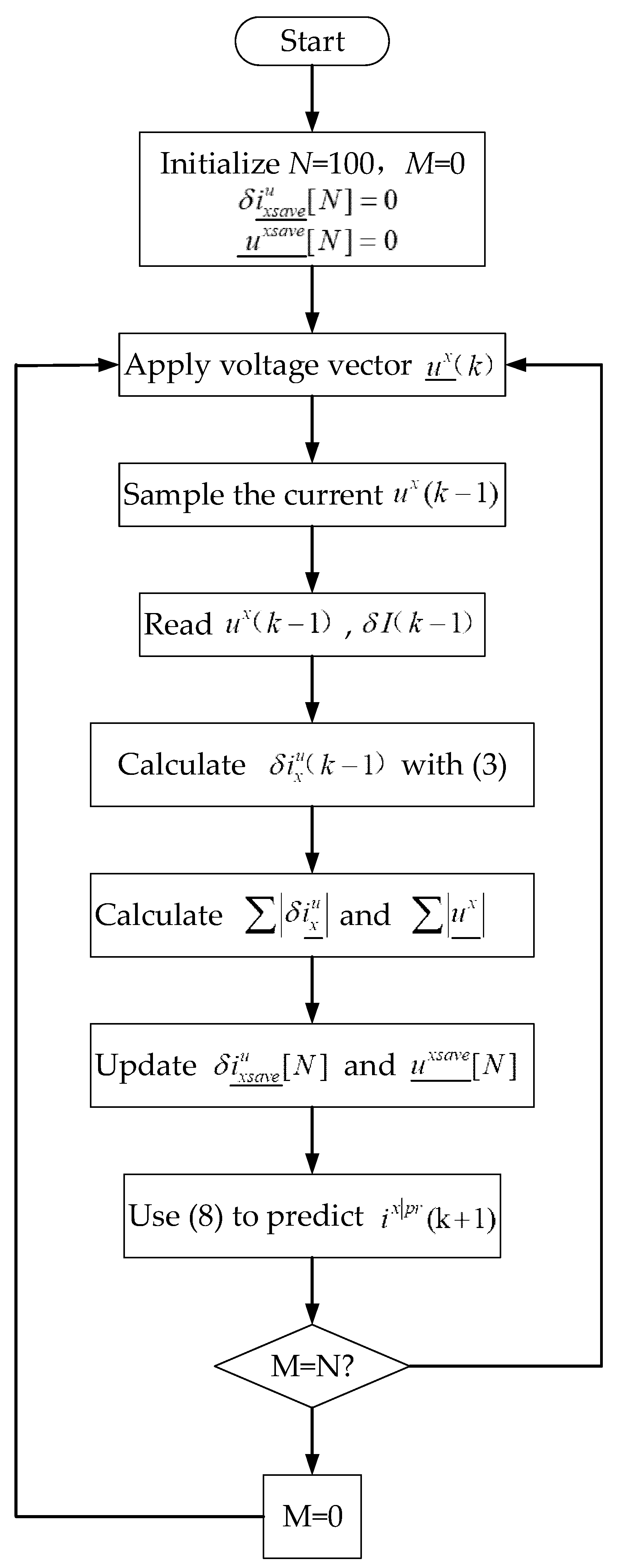
3.2. Sampling Noise Suppression
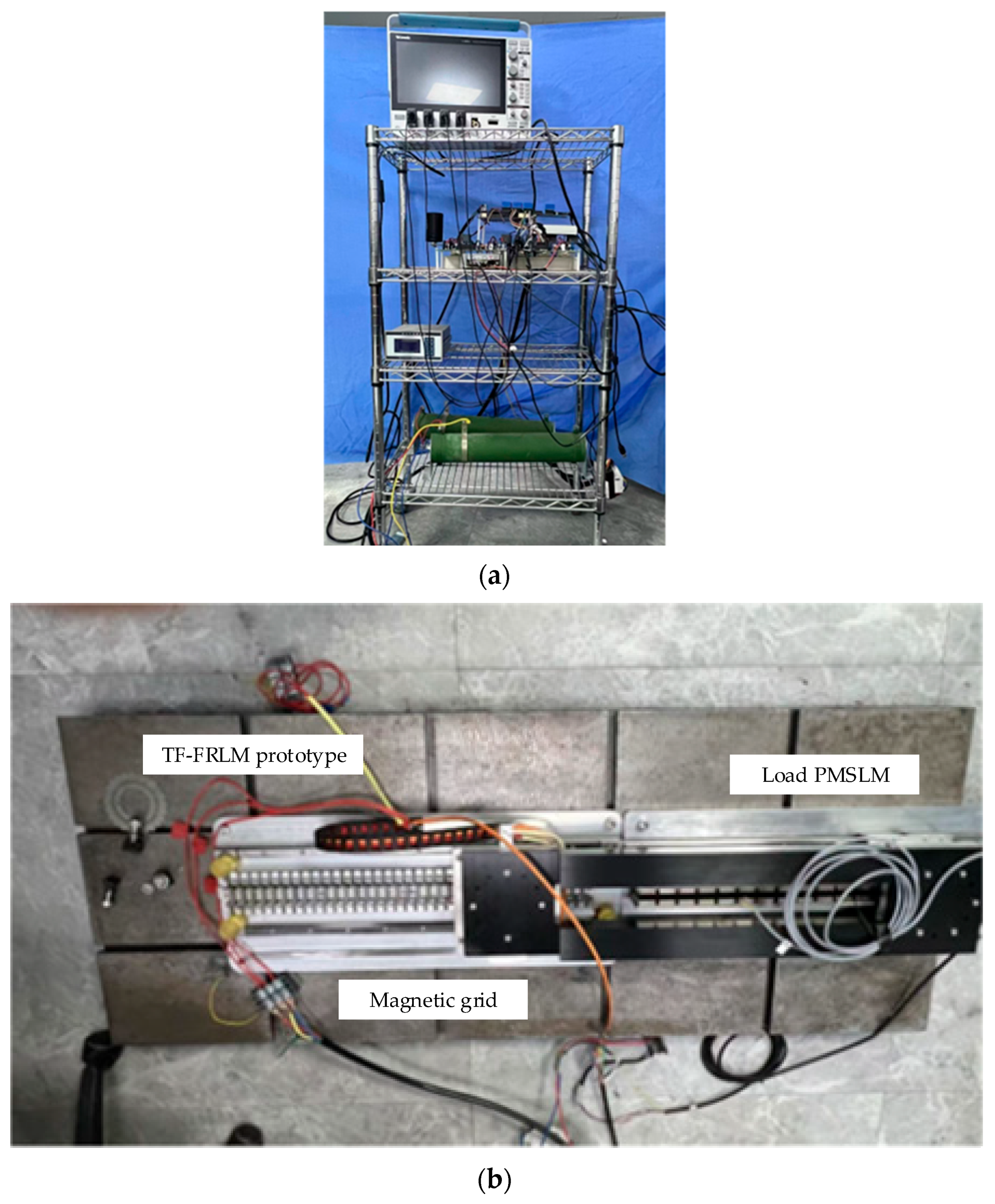
4. Experimental Verification
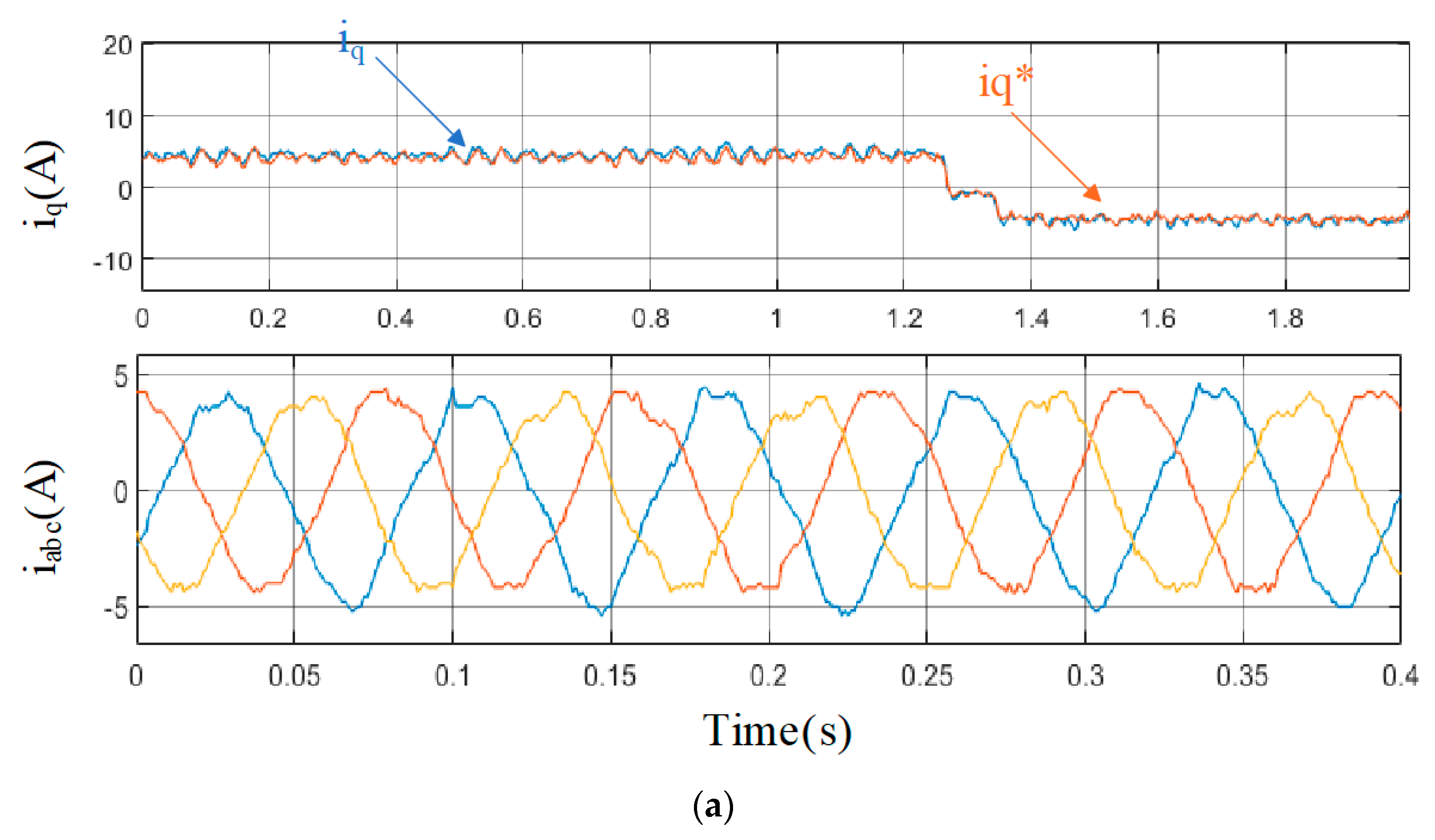
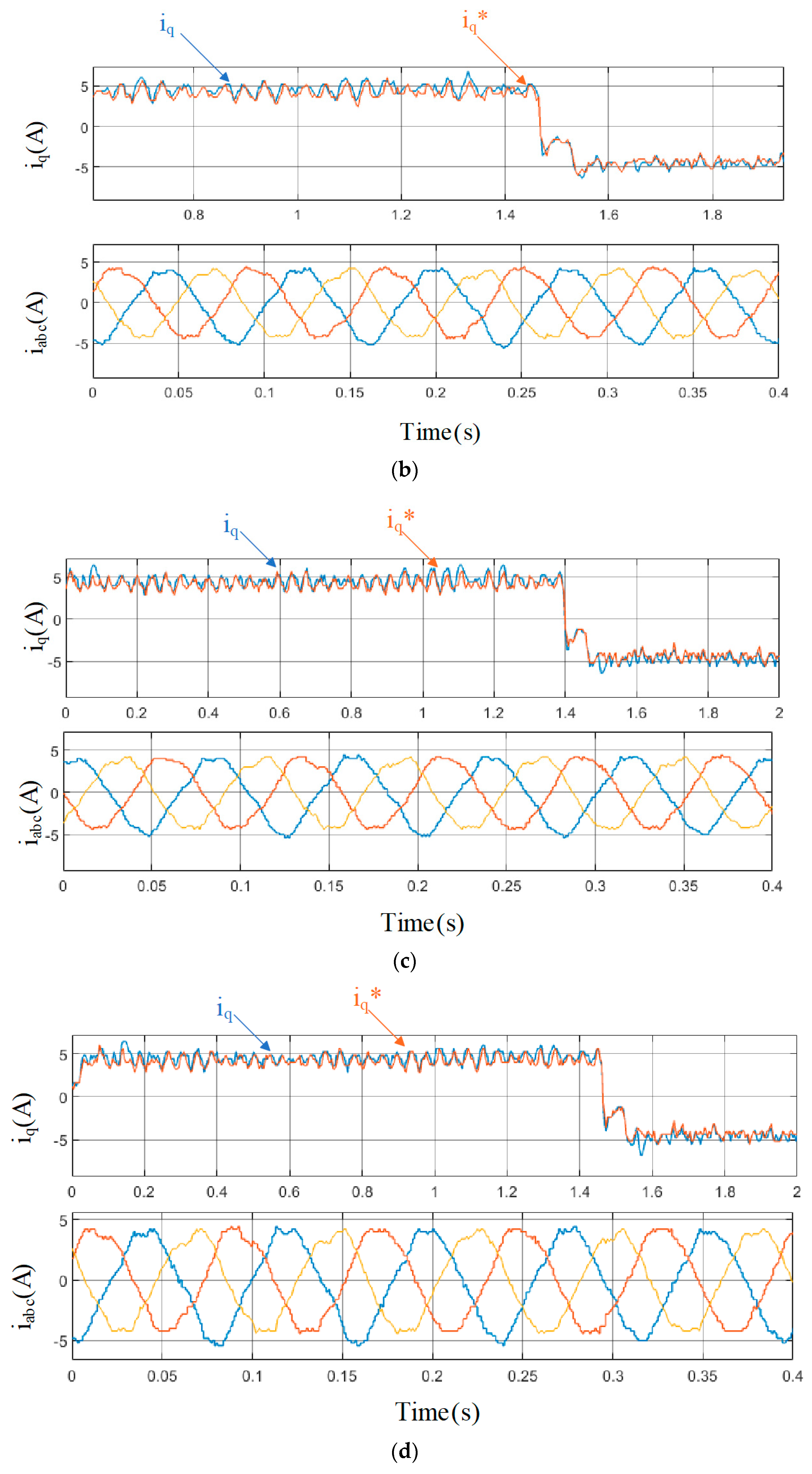
4.1. Steady State Performance
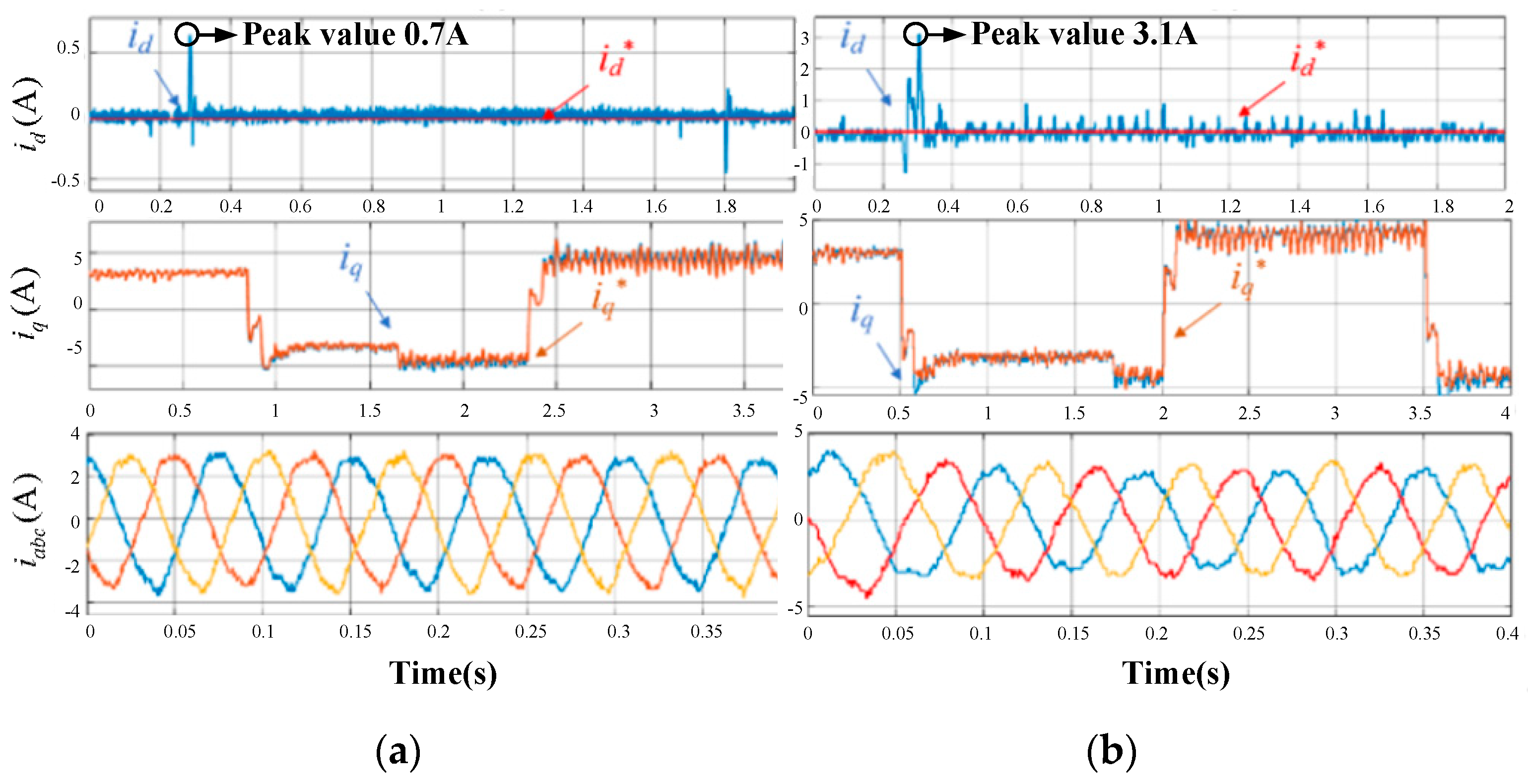
4.2. Dynamic Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Luo, M.; Duan, J.-A.; Kou, B. Design and Analysis of a Novel Frequency Modulation Secondary for High-Speed Permanent Magnet Linear Synchronous Motor. IEEE/ASME Trans. Mechatron. 2022, 27, 790–799. [Google Scholar] [CrossRef]
- Zhao, J.; Mou, Q.; Zhu, C.; Chen, Z.; Li, J. Study on a Double-Sided Permanent-Magnet Linear Synchronous Motor with Reversed Slots. IEEE/ASME Trans. Mechatron. 2021, 26, 3–12. [Google Scholar] [CrossRef]
- Jiao, Z.; Wang, T.; Yan, L. Design of a Tubular Linear Oscillating Motor with a Novel Compound Halbach Magnet Array. IEEE/ASME Trans. Mechatron. 2017, 22, 498–508. [Google Scholar] [CrossRef]
- Lv, G.; Liu, Y.; Zhang, Z.; Zhou, T. Characteristic Analysis of Coreless-Type Linear Synchronous Motor with the Racetrack Coils as Secondary for EDS Maglev Train. IEEE/ASME Trans. Mechatron. 2022, 27, 4654–4664. [Google Scholar] [CrossRef]
- Luo, J.; Kou, B.; Yang, X.; Zhang, H.; Zhang, L. Development, Design, and Analysis of a Dual-Consequent-Pole Transverse Flux Linear Machine for Direct-Drive Applications. IEEE Trans. Ind. Electron. 2021, 68, 6097–6108. [Google Scholar] [CrossRef]
- Li, X.; Xu, W.; Ye, C.; Boldea, I. Comparative Study of Transversal-Flux Permanent-Magnetic Linear Oscillatory Machines for Compressor. IEEE Trans. Ind. Electron. 2018, 65, 7437–7446. [Google Scholar] [CrossRef]
- Xu, W.; Li, X.; Zhu, J.; Wang, Q. 3-D Modeling and Testing of a Stator-Magnet Transverse-Flux Linear Oscillatory Machine for Direct Compressor Drive. IEEE Trans. Ind. Electron. 2021, 68, 8474–8486. [Google Scholar] [CrossRef]
- Shin, J.-S.; Watanabe, R.; Koseki, T.; Kim, H.-J. Practical Design Approach of a Transverse Flux Linear Synchronous Motor for Compact Size, Small Mover Weight, High Efficiency, and Low Material Cost. IEEE Trans. Magn. 2015, 51, 8200504. [Google Scholar] [CrossRef]
- Yang, X.; Zhou, Y. PM Flux Analysis and Thrust Density Enhancement of a Transverse-flux Flux-reversal Linear Motor for Transportation System. IEEE Trans. Transp. Electrif. 2024, 10, 5294–5306. [Google Scholar] [CrossRef]
- Chen, M.; Huang, L.; Li, Y.; Meng, G.; Xia, T. A Low Thrust Ripple Flux-Reversal Transverse Flux Permanent Magnet Linear Generator Used in Direct Drive Wave Energy Converter. IEEE Trans. Magn. 2024, 60, 8600505. [Google Scholar] [CrossRef]
- Sui, Y.; Yin, Z.; Wang, M.; Yu, B.; Zheng, P. A Tubular Staggered-Teeth Transverse-Flux PMLM with Circumferentially Distributed Three-Phase Windings. IEEE Trans. Ind. Electron. 2019, 66, 4837–4848. [Google Scholar] [CrossRef]
- Chen, H.; Nie, R.; Zhao, W.; Liu, J. A Novel Three-Phase Tubular Switched Reluctance Linear Machine with Transverse-Flux Path. IEEE Trans. Appl. Supercond. 2020, 30, 5204606. [Google Scholar] [CrossRef]
- Chen, M.; Huang, L.; Tan, P.; Li, Y.; Ahmad, G.; Hu, M. A Stator-PM Transverse Flux Permanent Magnet Linear Generator for Direct Drive Wave Energy Converter. IEEE Access 2021, 9, 9949–9957. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Elmorshedy, M.F.; Xu, W.; Allam, S.M.; Rodriguez, J.; Garcia, C. MTPA-based finite-set model predictive control without weighting fac- tors for linear induction machine. IEEE Trans. Ind. Electron. 2021, 68, 2034–2047. [Google Scholar] [CrossRef]
- Wang, F.; Li, S.; Mei, X.; Xie, W.; Rodriguez, J.; Kennel, R.M. Model-based predictive direct control strategies for electrical drives: An experimental evaluation of PTC and PCC methods. IEEE Trans. Ind. Inform. 2015, 11, 671–681. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, B.; Mei, Y. Deadbeat Predictive Current Control of Permanent-Magnet Synchronous Motors with Stator Current and Disturbance Observer. IEEE Trans. Power Electron. 2017, 32, 3818–3834. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, J.; Yang, X.; Zheng, Z.; Zhang, X.; Wang, L. Robust Deadbeat Predictive Current Regulation for Permanent Magnet Synchronous Linear Motor Drivers with Parallel Parameter Disturbance and Load Observer. IEEE Trans. Power Electron. 2022, 37, 7834–7845. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, H.; Yao, H. Model-free control of surface mounted PMSM drive system. In Proceedings of the 2016 IEEE International Conference on Industrial Technology (ICIT), Taipei, Taiwan, 14–17 March 2016; pp. 175–180. [Google Scholar]
- Lin, C.-K.; Liu, T.-H.; Yu, J.-T.; Fu, L.-C.; Hsiao, C.-F. Model-Free Predictive Current Control for Interior Permanent-Magnet Synchronous Motor Drives Based on Current Difference Detection Technique. IEEE Trans. Ind. Electron. 2014, 61, 667–681. [Google Scholar] [CrossRef]
- Carlet, P.G.; Tinazzi, F.; Bolognani, S.; Zigliotto, M. An Effective Model-Free Predictive Current Control for Synchronous Reluctance Motor Drives. IEEE Trans. Ind. Appl. 2019, 55, 3781–3790. [Google Scholar] [CrossRef]
- Hu, C.; Yin, Z.; Rui, T.; Zhang, Z.; Shen, W.; Cao, W.; Holmes, D.G. A Novel Double-Voltage-Vector Model-Free Predictive Current Control Method for Two-Level Voltage Source Inverters. IEEE Trans. Ind. Electron. 2023, 70, 5872–5884. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, H.; Liu, R.; Mao, J. Continuous Voltage Vector Model-Free Predictive Current Control of Surface Mounted Permanent Magnet Synchronous Motor. IEEE Trans. Energy Convers. 2019, 34, 899–908. [Google Scholar] [CrossRef]
- Song, W.; Li, J.; Ma, C.; Xia, Y.; Yu, B. A Simple Tuning Method of PI Regulators in FOC for PMSM Drives Based on Deadbeat Predictive Conception. IEEE Trans. Transp. Electrif. 2024, 10, 9852–9863. [Google Scholar] [CrossRef]
- Mao, M.; Zhang, Z.; Ding, Y.; Shi, H.; Chang, L. PI parameters design of universal controller for PMSG-WGS based on per-unit system. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 1681–1688. [Google Scholar]
- Lidozzi, A.; Solero, L.; Crescimbini, F.; Di Napoli, A. Direct tuning strategy for speed controlled PMSM drives. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 1265–1270. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | U-Shaped TF-FRLM as Figure 1 | Improved C-shaped TF-FRLM as Figure 2 | |
|---|---|---|---|
| Geometric dimensions | pole pitch | 8 mm | 8 mm |
| pole pairs | 2 | 2 | |
| tooth width | 14 mm | 14 mm | |
| slot width | 14 mm | 7 mm | |
| slot height | 20 mm | 40 mm | |
| magnet length | 16 mm | 16 mm | |
| magnet width | 8 mm | 8 mm | |
| magnet height | 3 mm | 3 mm | |
| gap length | 1 mm | 1 mm | |
| Electrical parameters | winding turns | 100 | 100 |
| rated current | 7 A | 7 A | |
| phase number | 3 | 3 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; He, X.; Yang, X. Model-Free Predictive Current Control for an Improved Transverse-Flux Flux-Reversal Linear Motor. Electronics 2025, 14, 2477. https://doi.org/10.3390/electronics14122477
Li Q, He X, Yang X. Model-Free Predictive Current Control for an Improved Transverse-Flux Flux-Reversal Linear Motor. Electronics. 2025; 14(12):2477. https://doi.org/10.3390/electronics14122477
Chicago/Turabian StyleLi, Quanmao, Xin He, and Xiaobao Yang. 2025. "Model-Free Predictive Current Control for an Improved Transverse-Flux Flux-Reversal Linear Motor" Electronics 14, no. 12: 2477. https://doi.org/10.3390/electronics14122477
APA StyleLi, Q., He, X., & Yang, X. (2025). Model-Free Predictive Current Control for an Improved Transverse-Flux Flux-Reversal Linear Motor. Electronics, 14(12), 2477. https://doi.org/10.3390/electronics14122477