
Modeling and Analysis in the Industrial Internet with Dual Delay and Nonlinear Infection Rate

Abstract
1. Introduction
- (1)
- A novel SMIQR virus propagation model is proposed for SCADA industrial systems. This model incorporates node information transfer mechanisms to simulate how nodes strengthen defenses upon receiving danger signals.
- (2)
- The model introduces a nonlinear infection rate to capture the non-proportional growth of infections under high loads, accounting for network congestion and defense resource constraints.
- (3)
- The model combines dual delays, namely the infection isolation and immunization loss delays. Through a rigorous mathematical proof analysis, these two delays are analyzed to have an inseparable impact on system stability, showing that their combined effect cannot be ignored and must be considered together in real industrial environments.
- (4)
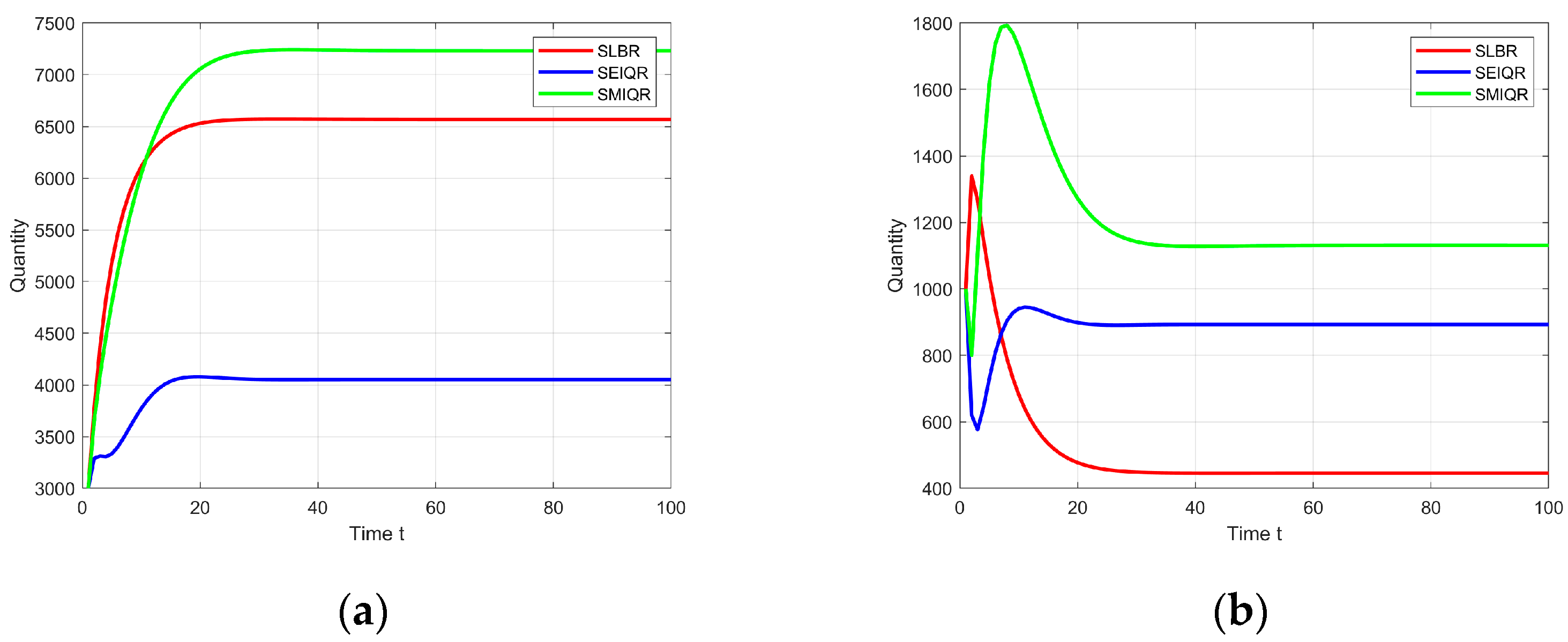
- An empirical comparison with the SLBR/SEIQR model validates the effectiveness of the SMIQR model for malware propagation in industrial networks.
- (5)
- A security defense strategy is developed to balance malware containment with uninterrupted industrial production, leveraging the model’s unique features.
2. Model Formulation
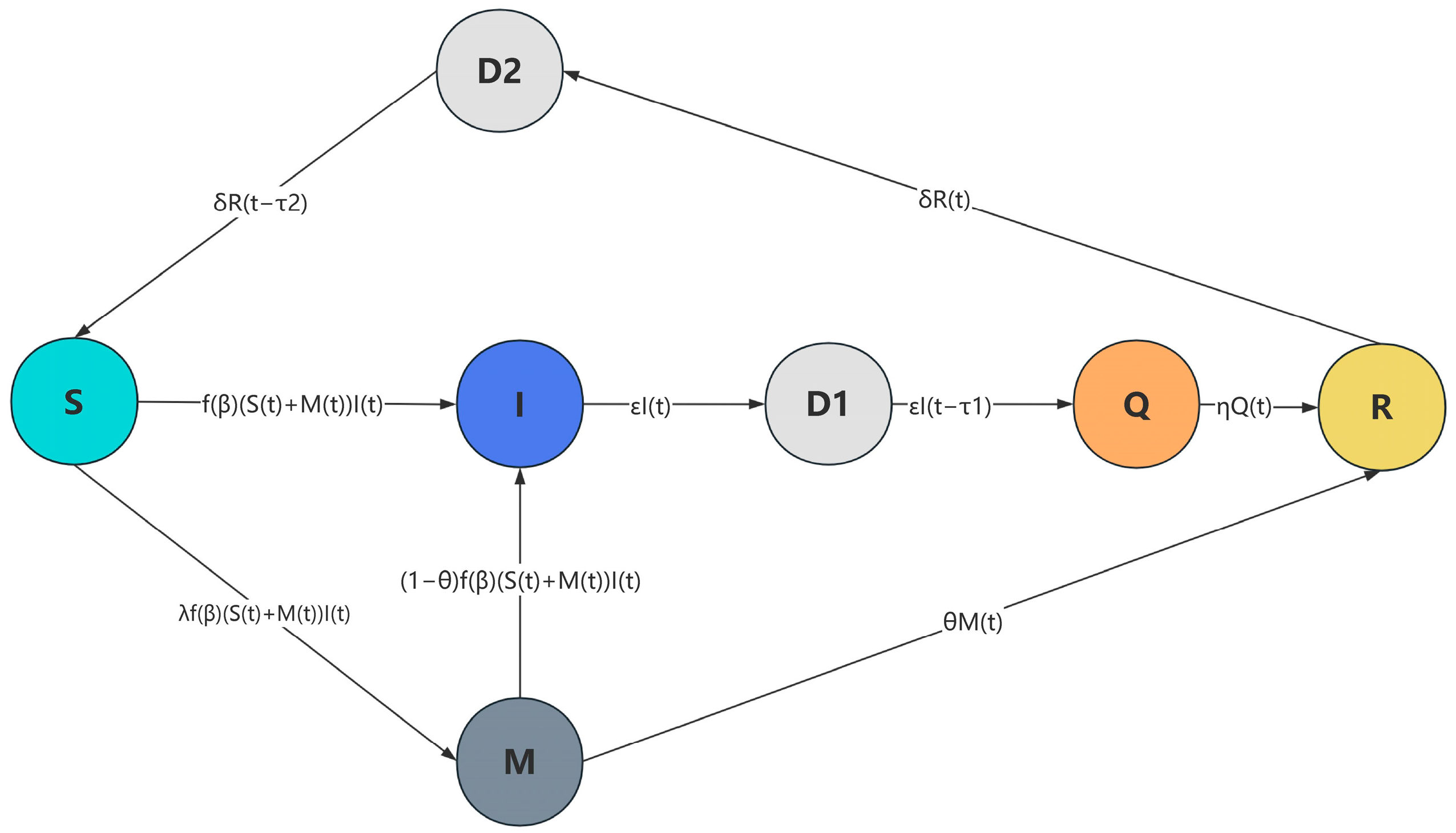
2.1. Model Node Configuration
2.2. Model Dynamical Equations
- (1)
- The RTU accesses the SCADA system at a constant rate b, and each state node can leave the system at a constant rate of .
- (2)
- Assuming that each susceptible node is infected at moment t with a nonlinear infection rate . Since both S and M nodes are essentially susceptible states, both can be infected by the infected node. Also, since the M state is not easily infected through the message passing of the infected node, there are (S + M)I infected S nodes at moment t.
- (3)
- denotes the rate at which infected nodes infect messages at time t. The number of infected nodes at time t is . Then, there are nodes with states from S to M.
- (4)
- indicates the magnitude of its defense capability in M state; some M state nodes can be directly converted to R immune state, and there are also (1 − M nodes that are converted to I state nodes after receiving the danger information.
- (5)
- With antivirus or anti-malware tools, there is a probability that a virus will be detected and quarantine measures will be taken such that nodes in the infected state of the system will be changed to quarantined nodes.
- (6)
- indicates the probability that a node in the quarantine state of the system transitions to the immune state, in which the quarantined computers may be scanned and repaired, the antivirus software is updated, and the system is protected from viruses by eliminating vulnerabilities and enhancing protection mechanisms.
- (7)
- Viruses may be updated in the process. If security patches are not installed in a timely manner, there is a probability that an immune node in the system will become susceptible again.
- (8)
- Due to the system’s time windowing mechanism and the resulting isolation delay, describes the time from the infected state to the isolated state.
- (9)
- In the case of virus variants or patch failure within the SCADA system, this process lasts for a specific period, resulting in an immunization delay described by from the immune state to the susceptible state.
2.3. Modeling Theory
3. Derivation
3.1. Basic Regeneration Number R0
3.2. Equilibrium Point Stability Analysis
3.3. Stability Analysis of Virus-Free Equilibrium Points
3.4. Stability Analysis of Viral Equilibrium Points
- (1)
- When for the positive equilibrium point of the system, is locally asymptotically stable. When , the positive equilibrium point is unstable.
- (2)
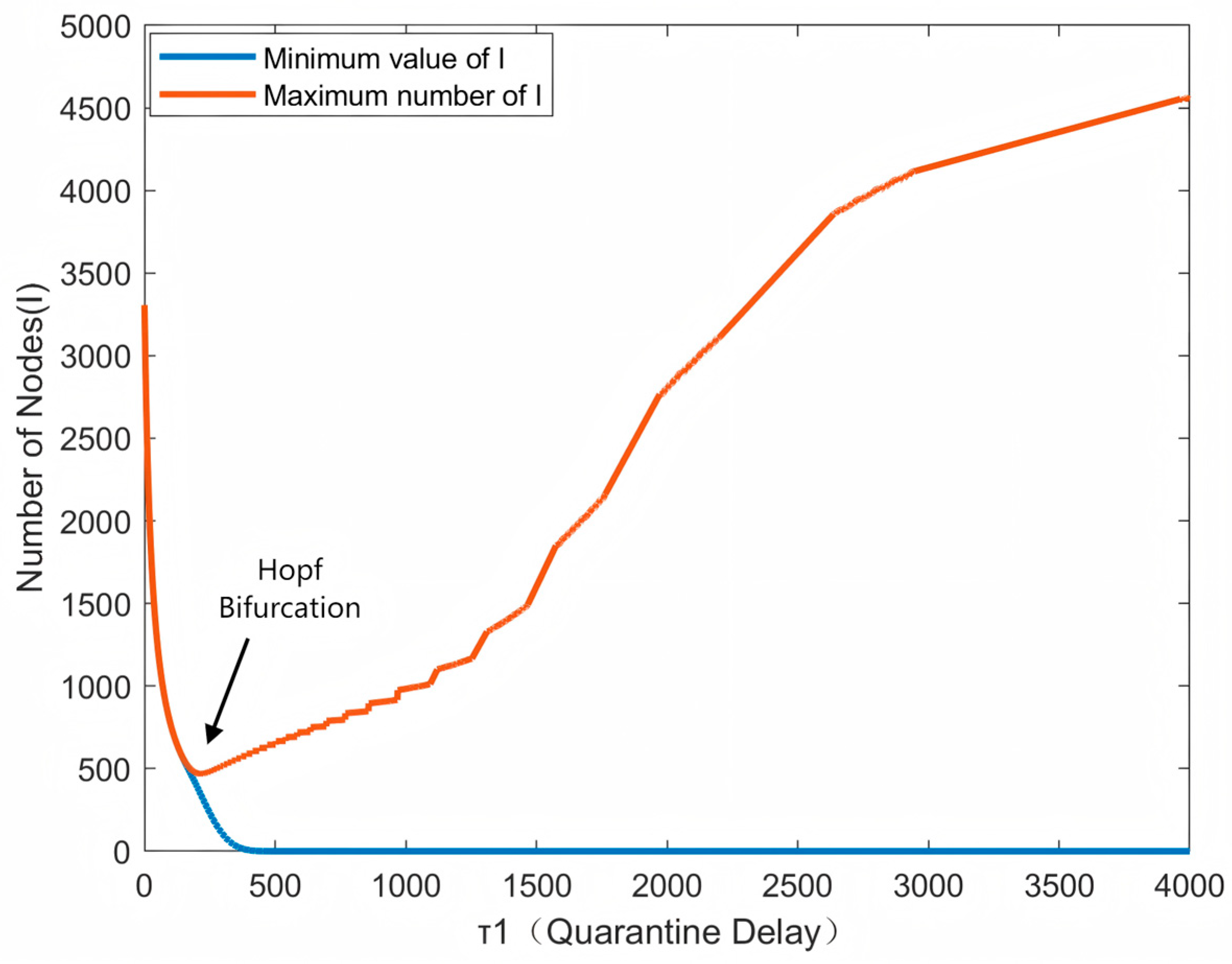
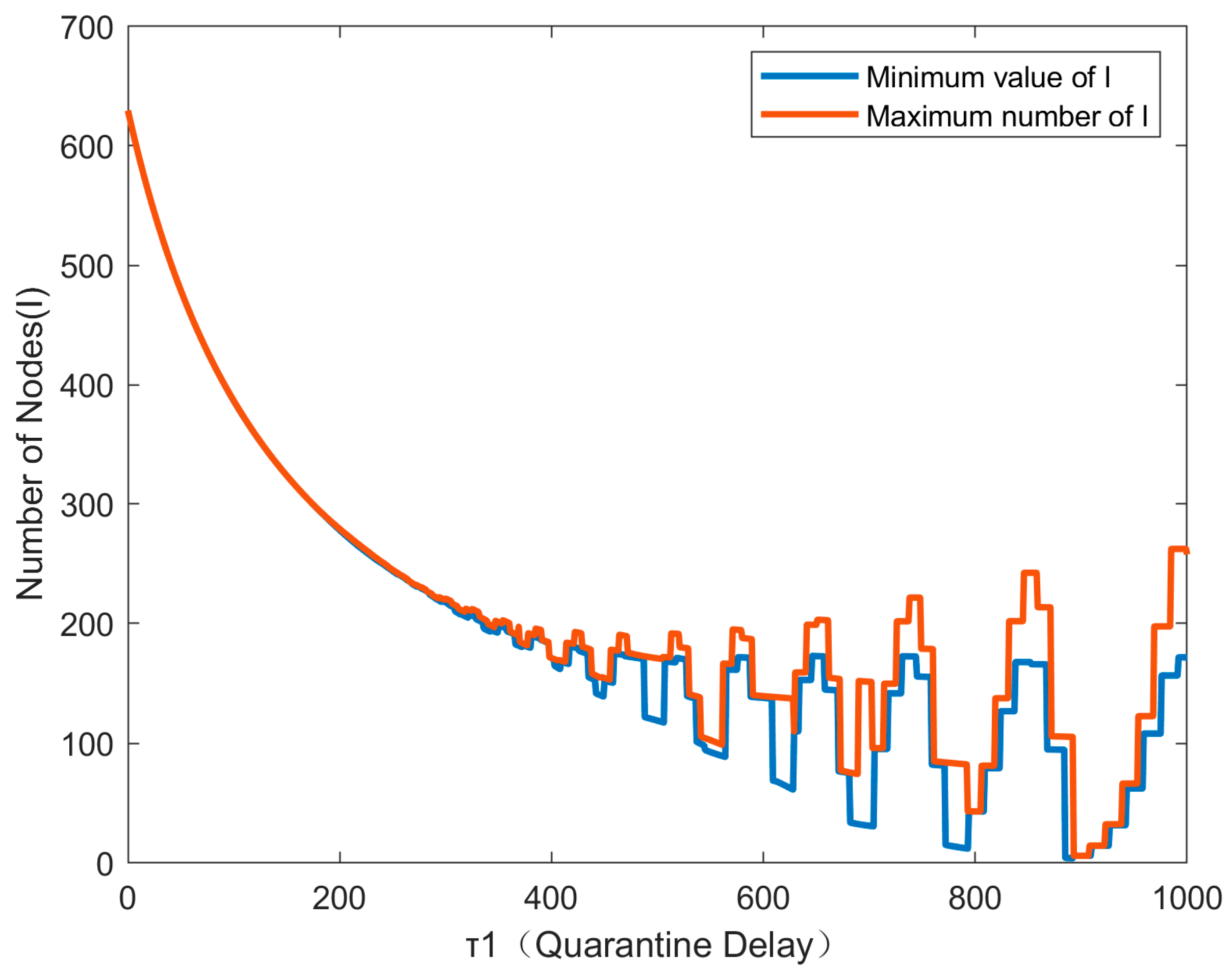
- When the system satisfies > 0, the positive equilibrium point of the system will undergo a Hopf bifurcation at , and the system is destabilized.
- (3)
- In the above equation, it can also be seen that the value of is also affected by . Hence, the system may have more than one bifurcation point when are both greater than 0. This situation needs to be analyzed specifically in the experiment.
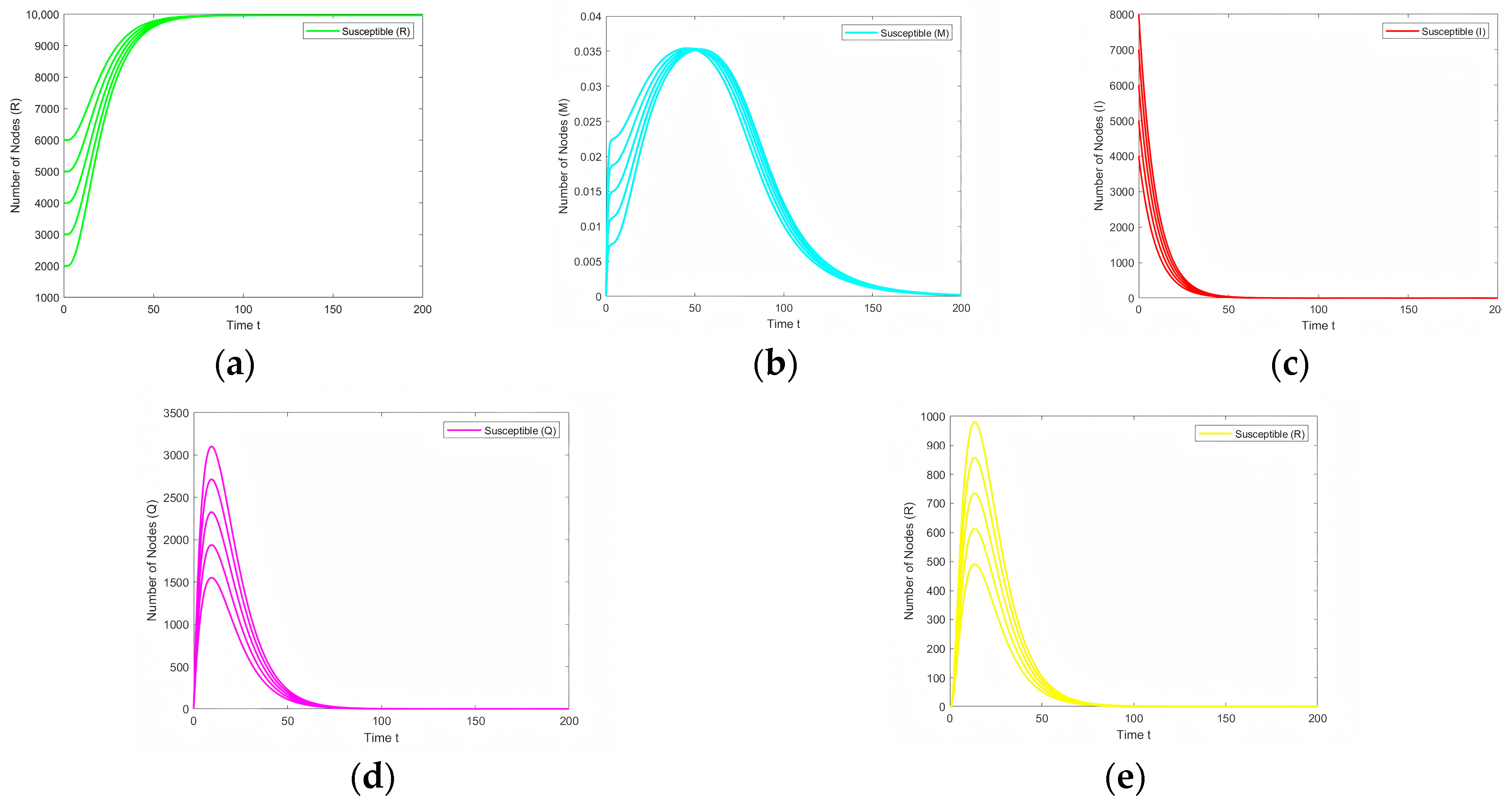
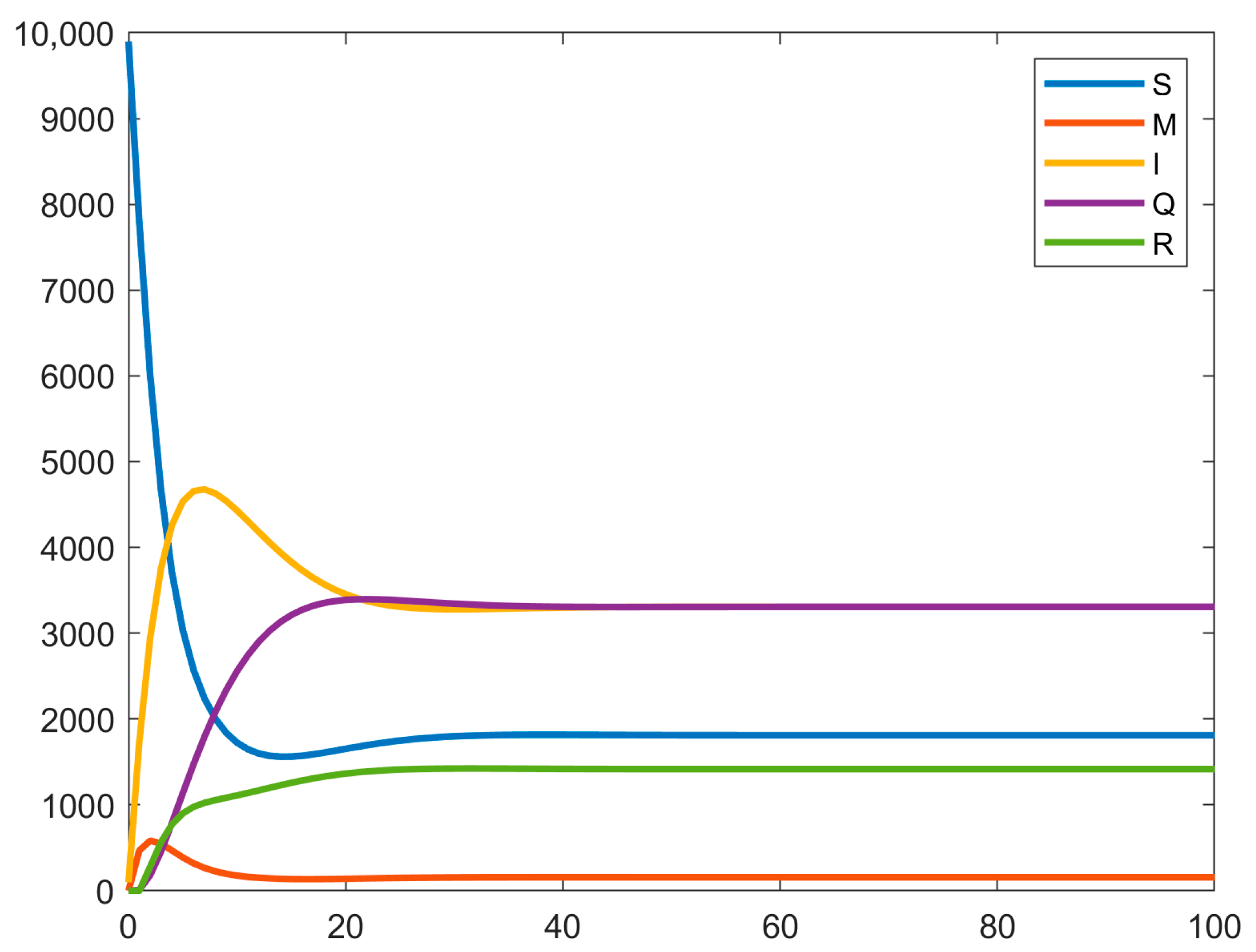
4. Numerical Simulation
4.1. Equilibrium Analysis
4.1.1. Disease-Free Equilibrium Points
4.1.2. Viral Equilibrium Point Stability
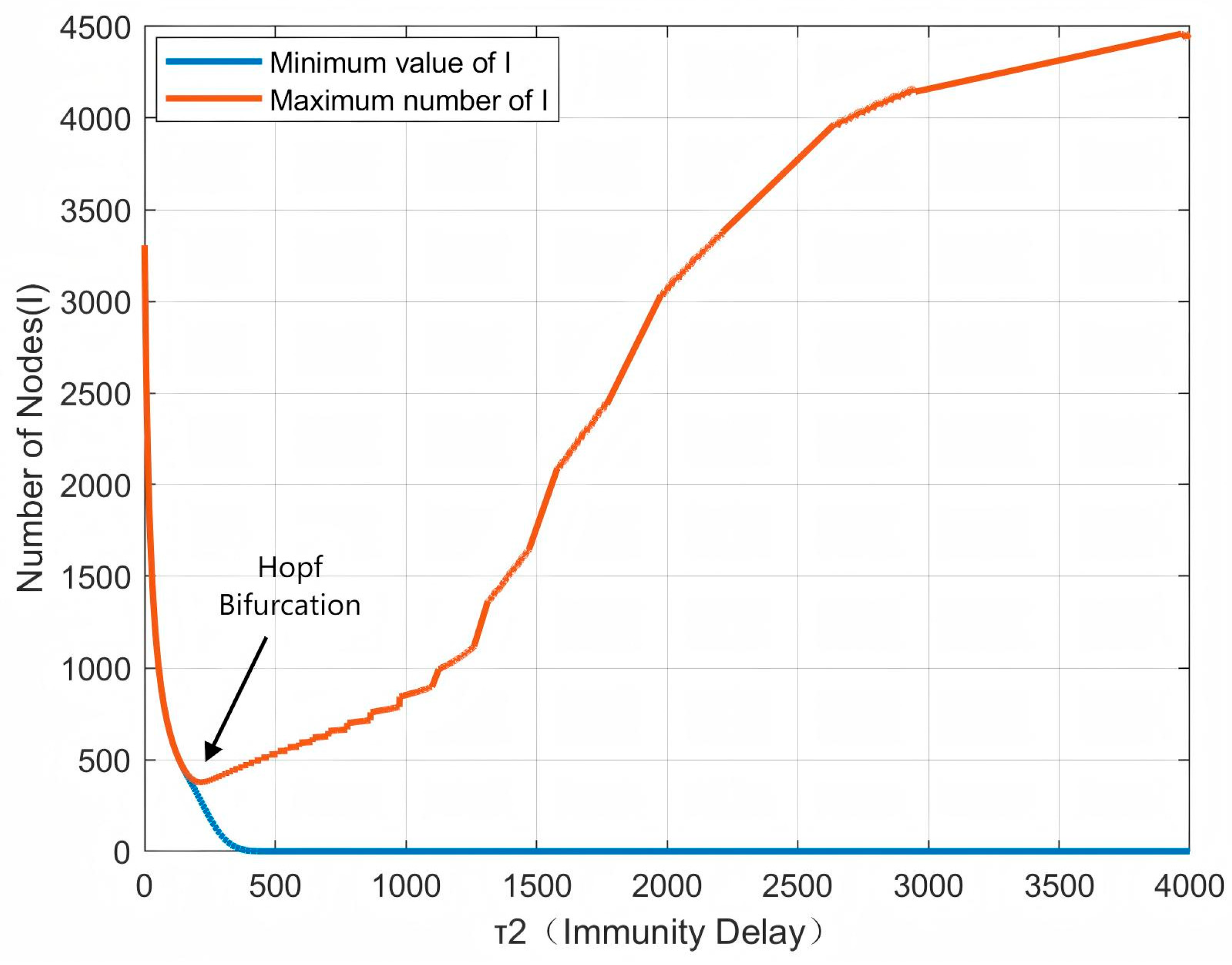
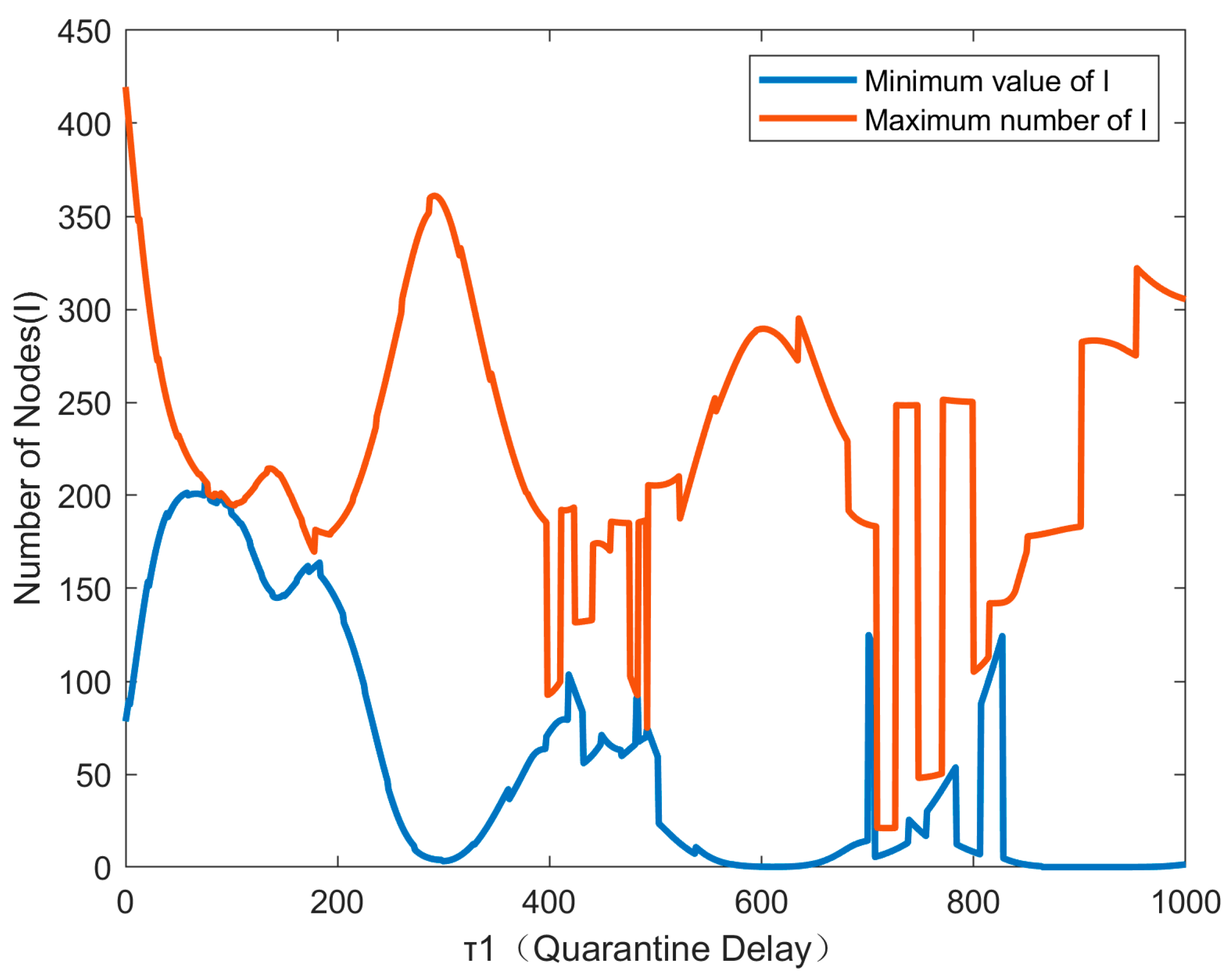
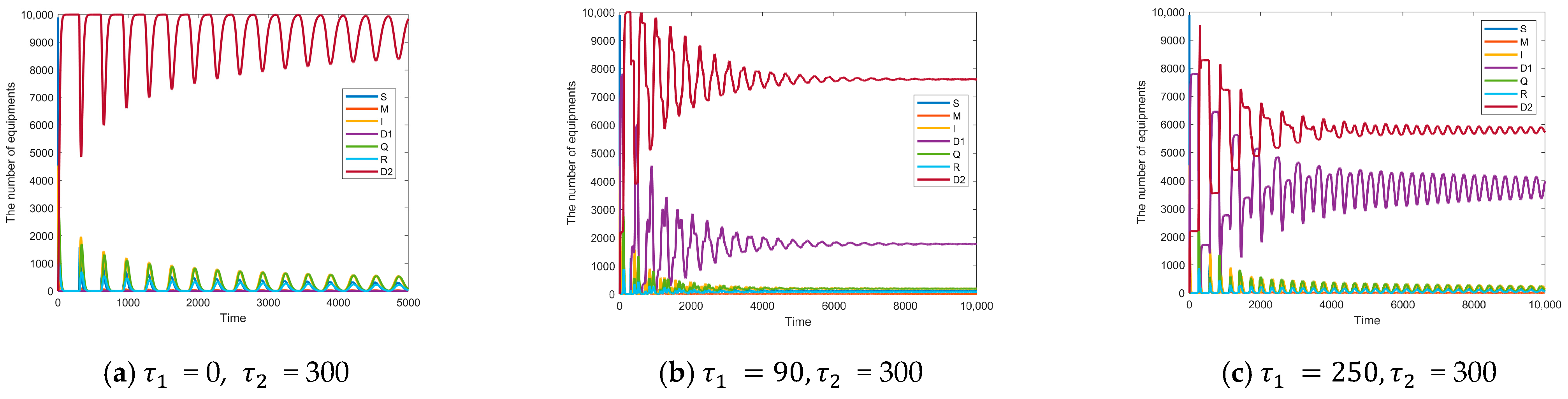
4.2. Dual Delayed Impact
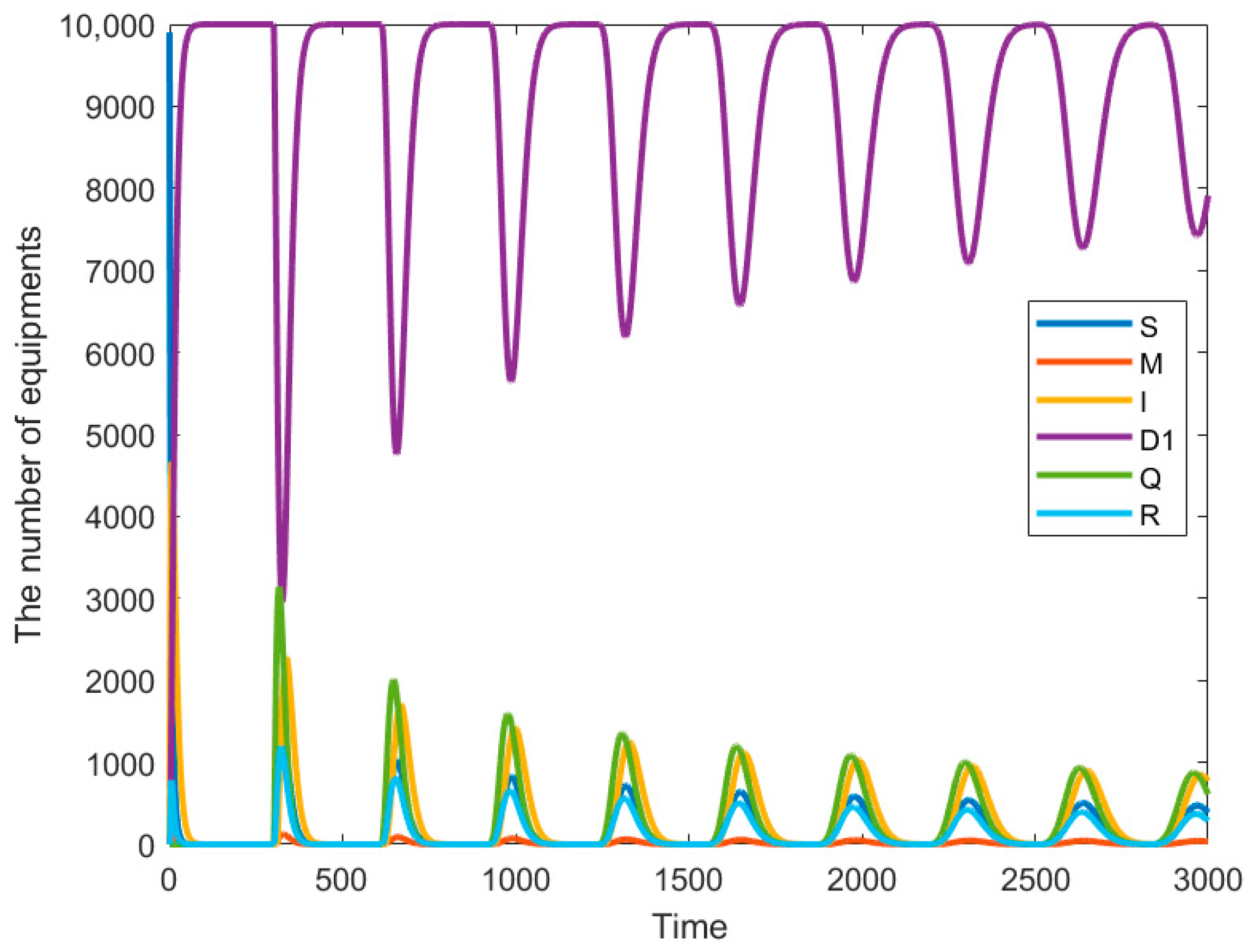
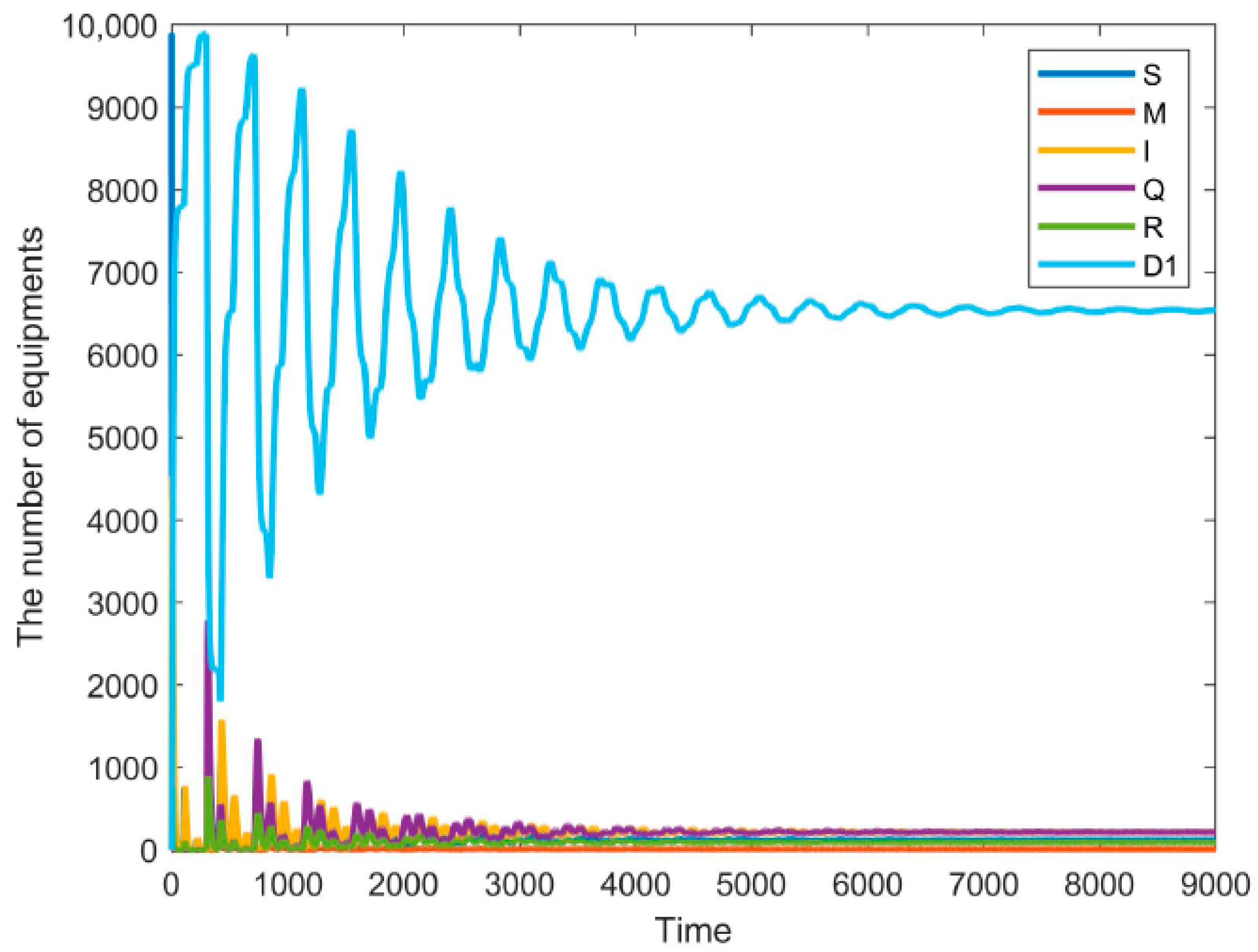
4.2.1. The Case of = 0
4.2.2. The Case of = 0
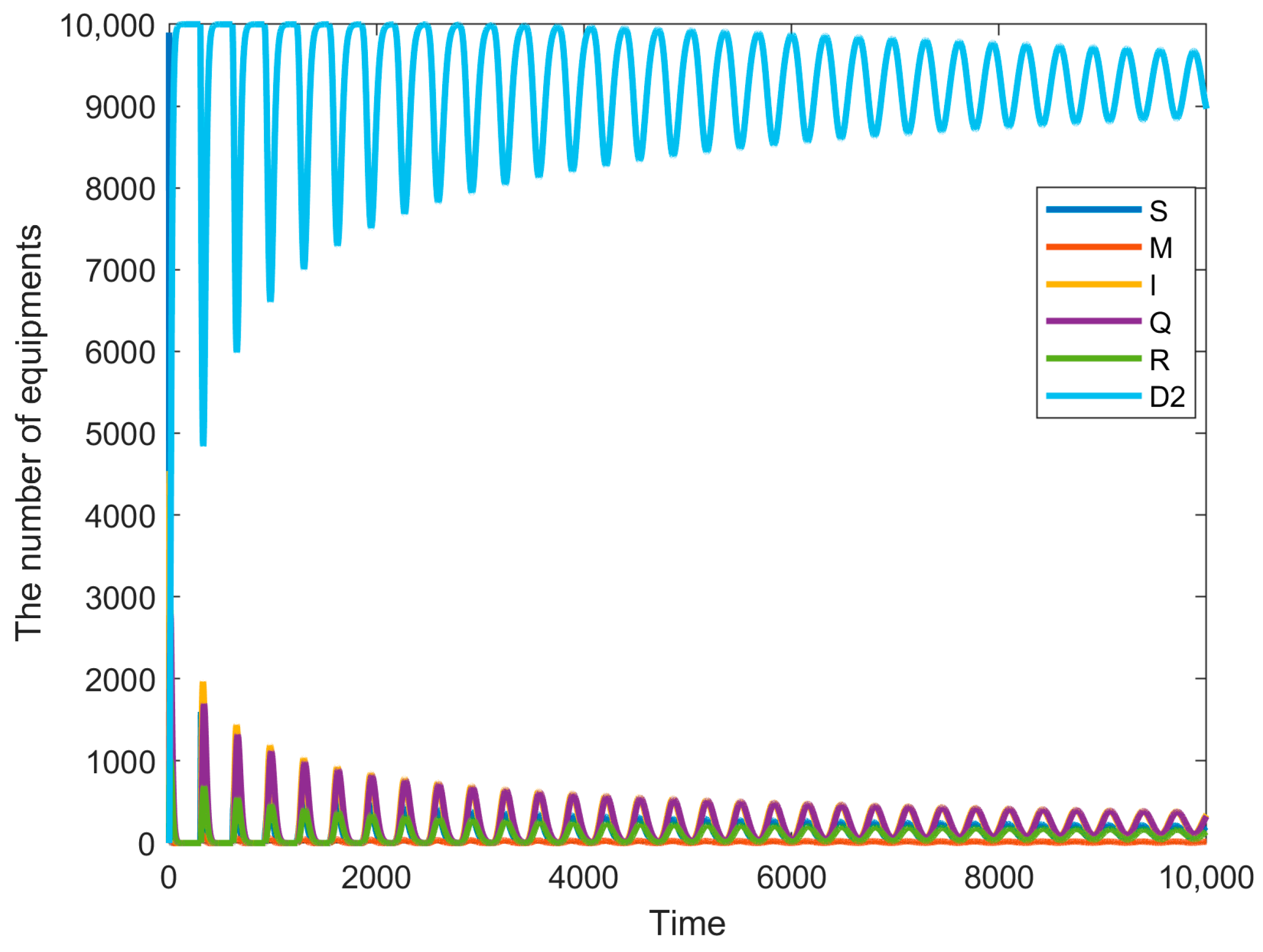
4.2.3. The Case of > 0,
4.2.4. The Case of > 0,
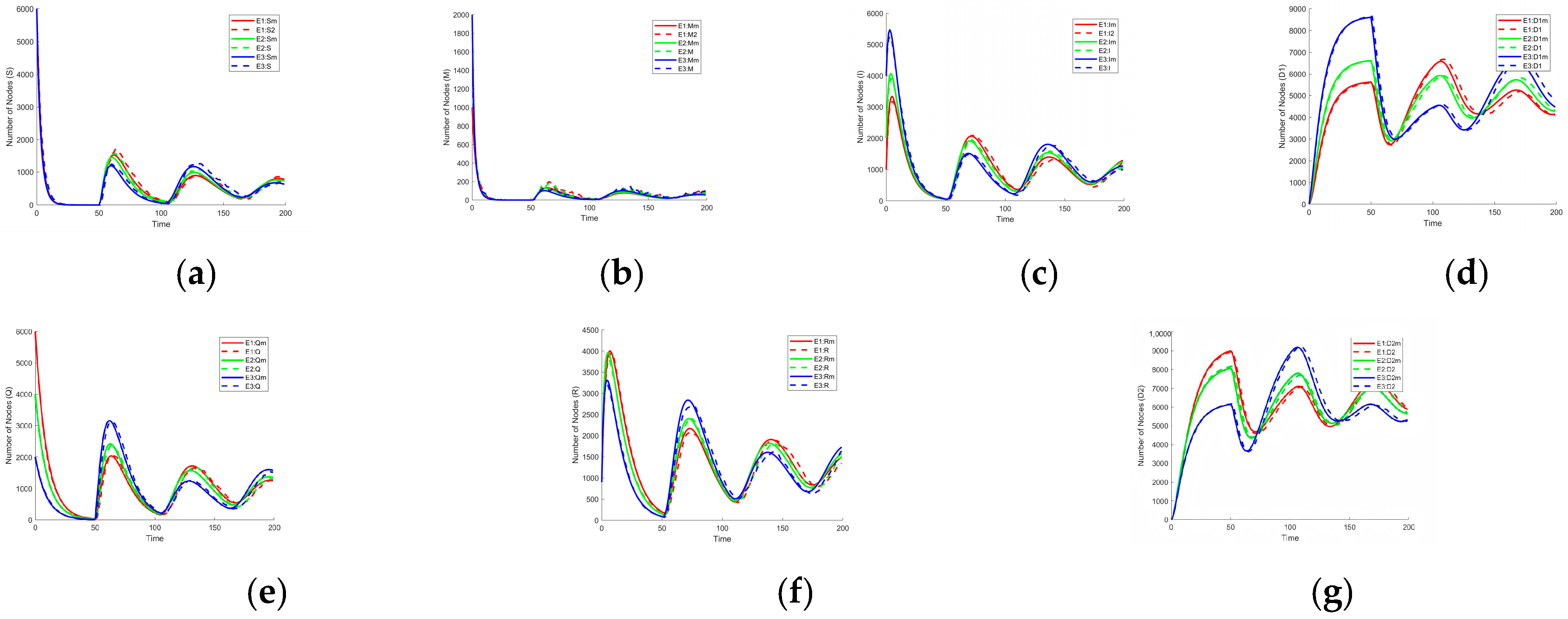
5. Experimental Analysis
- (E1) (S(0), M(0), I(0), D1(0), Q(0), R(0), D2(0)) = (6000,1000,1000,0,6000,900,0).
- (E2) (S(0), M(0), I(0), D1(0), Q(0), R(0), D2(0)) = (6000,2000,2000,0,4000,900,0).
- (E3) (S(0), M(0), I(0), D1(0), Q(0), R(0), D2(0)) = (6000,2000,4000,0,2000,900,0).
6. Model Comparison
7. Conclusions
- (1)
- This paper analyzes the structure of SCADA systems and the security threats they face and proposes a novel SCADA industrial network virus propagation model, SMIQR. The construction of this model is based on the phenomenon observed in social networks, financial markets, and urban transportation systems, where “immune” nodes reduce virus propagation through information exchange. It simulates the process by which infected nodes transmit dangerous information to uninfected nodes. The model considers the impact of information transmission between nodes and allows nodes to enhance their defensive capabilities after receiving dangerous information, thereby improving the overall antivirus capability of the group of nodes.
- (2)
- Methodologically, this paper adopts the assumptions of nonlinear infection rates and dual delay, which align more closely with the actual conditions of industrial control networks. Unlike the commonly used bilinear infection rate assumption in existing research, this paper considers the uncertainty in the behavior of susceptible devices, thereby introducing the concept of nonlinear infection rates and incorporating isolation strategies to effectively control virus propagation.
- (3)
- Based on the characteristics of industrial viruses and the model, this paper designs an algorithm using a real dataset and validates the model’s effectiveness through this dataset.
- (4)
- Building on this foundation, the paper investigates the propagation of malware in industrial control networks, the stability of dynamic systems, and the Hopf bifurcation phenomenon. The study finds that in a dual delay system, the dual delays interact and cannot be simply separated into two single-delay systems for individual discussion. During the research process, it is essential to clarify the impact of different delays on system stability, and one cannot merely require one delay to be as small as possible. This is because, in a dual delay system, a small value of the other delay may still lead to bifurcation even if one delay is fixed. Therefore, it is necessary to specifically analyze the combined impact of the dual delays on the dynamic system and precisely control them to ensure system stability, thereby suppressing the spread of malware.
- (5)
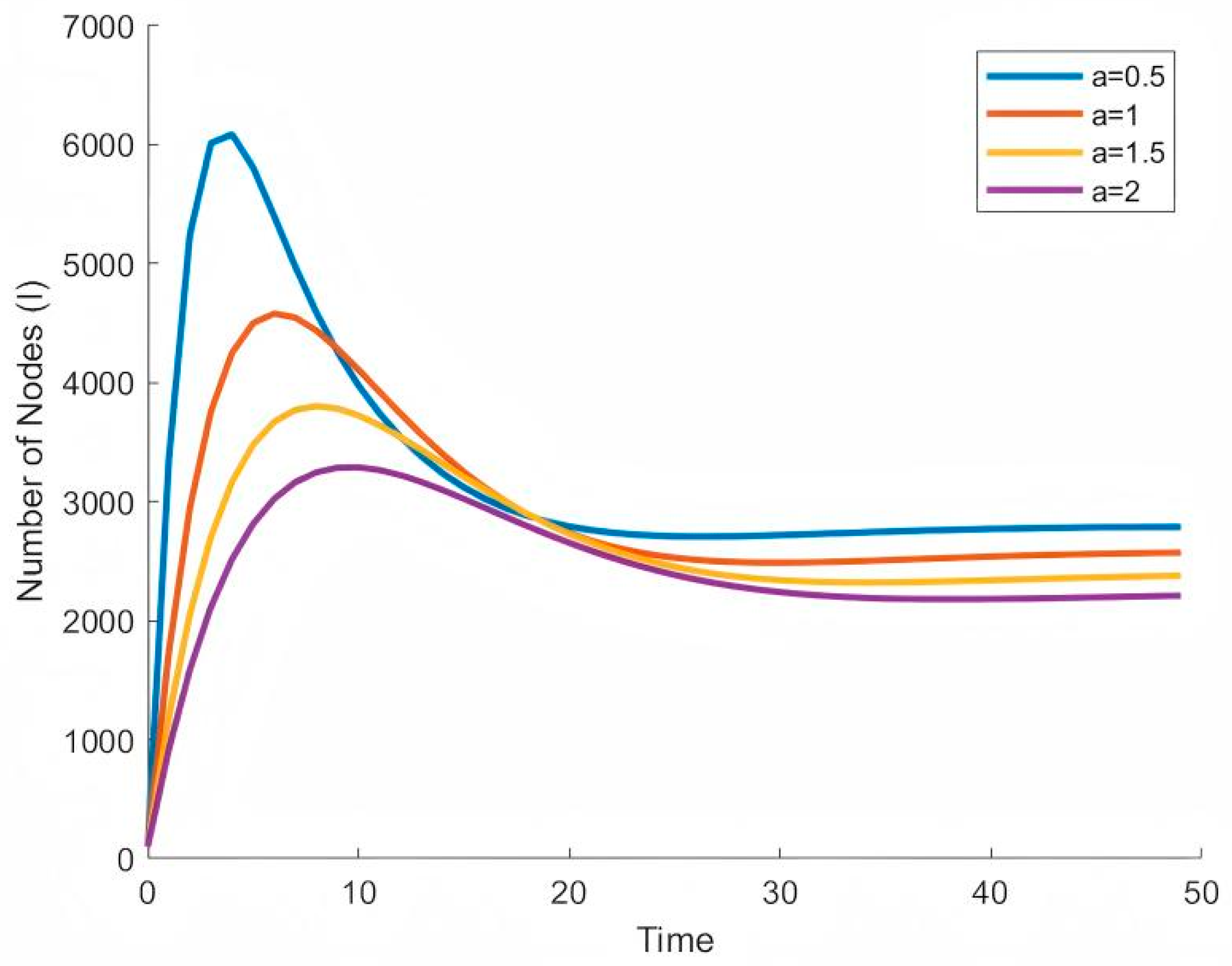
- Furthermore, through the analysis of the infection suppression factor, it is found that when implementing isolation measures, priority should be given to isolating devices with high connection density and more connected nodes to slow down the virus propagation rate. The value of the infection suppression factor *a* is a comprehensive result of multiple factors. By comprehensively analyzing the characteristics of the SCADA system, the saturation effect value suitable for this industrial network can be determined, enabling the formulation of corresponding strategies to reduce the infection suppression factor and achieve a system equilibrium with fewer infected nodes.
- Degree-dependent parameters to quantify propagation capability differences between hub nodes and edge nodes.
- Enhanced cross-layer propagation terms characterizing viral penetration through gateway devices.
- Dynamic threshold adaptation based on real-time topological features.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gaushell, D.J.; Darlington, H.T. Supervisory control and data acquisition. Proc. IEEE 1987, 75, 1645–1658. [Google Scholar] [CrossRef]
- Gelmini, A. 5G Scada Based Control System. Ph.D. Thesis, University of South Wales, Cardiff, UK, 2024. [Google Scholar]
- Wang, J.; Si, C.; Wang, Z.; Fu, Q. A New Industrial Intrusion Detection Method Based on CNN-BiLSTM. Comput. Mater. Contin. 2024, 79, 4297. [Google Scholar] [CrossRef]
- Hudedmani, M.G.; Umayal, R.M.; Kabberalli, S.K.; Hittalamani, R. Programmable logic controller (PLC) in automation. Adv. J. Grad. Res. 2017, 2, 37–45. [Google Scholar] [CrossRef]
- Zhang, H.; Tan, J.; Liu, X.; Huang, S.; Hu, H.; Zhang, Y. Cybersecurity threat assessment integrating qualitative differential and evolutionary games. IEEE Trans. Netw. Serv. Manag. 2022, 19, 3425–3437. [Google Scholar] [CrossRef]
- Kephart, J.O.; White, S.R. Directed-graph epidemiological models of computer viruses. In Computation: The Micro and the Macro View; World Scientific: Singapore, 1992; pp. 71–102. [Google Scholar]
- Kephart, J.O.; White, S.R.; Chess, D.M. Computers and epidemiology. IEEE Spectr. 1993, 30, 20–26. [Google Scholar] [CrossRef]
- Kephart, J.O.; White, S.R. Measuring and modeling computer virus prevalence. In Proceedings of the 1993 IEEE Computer Society Symposium on Research in Security and Privacy, Oakland, CA, USA, 24–26 May 1993; IEEE: Piscataway, NJ, USA, 1993; pp. 2–15. [Google Scholar]
- Wo, K. A contribution to the mathematical theory of epidemics. Proc. R. Soc. A 1927, 115, 700–721. [Google Scholar]
- Serazzi, G.; Zanero, S. Computer virus propagation models. In International Workshop on Modeling, Analysis, and Simulation of Computer and Telecommunication Systems; Springer: Berlin/Heidelberg, Germany, 2003; pp. 26–50. [Google Scholar]
- Wu, J.; Zhang, X.; Zhu, X.; Xu, X. A variant sirs virus spreading model. In Proceedings of the 2017 International Conference on Computer Systems, Electronics and Control (ICCSEC), Dalian, China, 25–27 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 121–124. [Google Scholar]
- Dodds, P.S.; Watts, D.J. A generalized model of social and biological contagion. J. Theor. Biol. 2005, 232, 587–604. [Google Scholar] [CrossRef]
- Zhao, T.; Zhang, Z.; Upadhyay, R.K. Delay-induced Hopf bifurcation of an SVEIR computer virus model with nonlinear incidence rate. Adv. Differ. Equ. 2018, 2018, 256. [Google Scholar] [CrossRef]
- Safar, J.L.; Tummala, M.; McEachen, J.C.; Bollmann, C. Modeling worm propagation and insider threat in air-gapped network using modified SEIQV model. In Proceedings of the 2019 13th International Conference on Signal Processing and Communication Systems (ICSPCS), Gold Coast, QLD, Australia, 16–18 December 2019; pp. 1–6. [Google Scholar]
- Sulaiman, M.; Khan, A.; Ali, A.N.; Laouini, G.; Alshammari, F.S. Quantitative analysis of worm transmission and insider risks in air-gapped networking using a novel machine learning approach. IEEE Access 2023, 11, 111034–111052. [Google Scholar] [CrossRef]
- Tang, W.; Liu, Y.J.; Chen, Y.L.; Yang, Y.X.; Niu, X.X. SLBRS: Network virus propagation model based on safety entropy. Appl. Soft Comput. 2020, 97, 106784. [Google Scholar] [CrossRef]
- Zhang, X.; Gan, C. Global attractivity and optimal dynamic countermeasure of a virus propagation model in complex networks. Phys. A Stat. Mech. Its Appl. 2018, 490, 1004–1018. [Google Scholar] [CrossRef]
- Jun, W.; Haoyang, G. Virtual force field coverage algorithms for wireless sensor networks in water environments. Int. J. Sens. Netw. 2020, 32, 174–181. [Google Scholar] [CrossRef]
- Shen, S.; Li, H.; Han, R.; Vasilakos, A.V.; Wang, Y.; Cao, Q. Differential game-based strategies for preventing malware propagation in wireless sensor networks. IEEE Trans. Inf. Forensics Secur. 2014, 9, 1962–1973. [Google Scholar] [CrossRef]
- Matta, V.; Di Mauro, M.; Longo, M.; Farina, A. Cyber-threat mitigation exploiting the birth–death–immigration model. IEEE Trans. Inf. Forensics Secur. 2018, 13, 3137–3152. [Google Scholar] [CrossRef]
- Carcano, A.; Coletta, A.; Guglielmi, M.; Masera, M.; Fovino, I.N.; Trombetta, A. A multidimensional critical state analysis for detecting intrusions in SCADA systems. IEEE Trans. Ind. Inform. 2011, 7, 179–186. [Google Scholar] [CrossRef]
- Sheng, C.; Yao, Y.; Fu, Q.; Yang, W.; Liu, Y. Study on the intelligent honeynet model for containing the spread of industrial viruses. Comput. Secur. 2021, 111, 102460. [Google Scholar] [CrossRef]
- Wang, Y.; Gu, D.; Peng, D.; Chen, S.; Yang, H. Stuxnet vulnerabilities analysis of scada systems. In Proceedings of the International Conference on Network Computing and Information Security, Shanghai, China, 7–9 December 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 640–646. [Google Scholar]
- Valentine, S.E. PLC Code Vulnerabilities Through SCADA Systems; University of South Carolina: Columbia, SC, USA, 2013. [Google Scholar]
- Stanković, A.M.; Tomsovic, K.L.; De Caro, F.; Braun, M.; Chow, J.H.; Čukalevski, N.; Dobson, I.; Eto, J.; Fink, B.; Hachmann, C.; et al. Methods for analysis and quantification of power system resilience. IEEE Trans. Power Syst. 2022, 38, 4774–4787. [Google Scholar] [CrossRef]
- He, J.; Li, Y.; Tang, J.; Wang, H.; Yang, G.; Li, T.; Lan, X. An Immune Knowledge-Driven SCADA-Based Industrial Virus Propagation Model. IEEE Internet Things J. 2024, 11, 29956–29970. [Google Scholar] [CrossRef]
- Zhang, R.; Cao, Z.; Yang, S.; Si, L.; Sun, H.; Xu, L.; Sun, F. Cognition-driven structural prior for instance-dependent label transition matrix estimation. IEEE Trans. Neural Netw. Learn. Syst. 2024, 36, 3730–3743. [Google Scholar] [CrossRef]
- Zhang, R.; Tan, J.; Cao, Z.; Xu, L.; Liu, Y.; Si, L.; Sun, F. Part-aware correlation networks for few-shot learning. IEEE Trans. Multimed. 2024, 26, 9527–9538. [Google Scholar] [CrossRef]
- Wu, Y.; Ru, Y.; Lin, Z.; Liu, C.; Xue, T.; Zhao, X.; Chen, J. Research on cyber attacks and defensive measures of power communication network. IEEE Internet Things J. 2022, 10, 7613–7635. [Google Scholar] [CrossRef]
- Nankya, M.; Chataut, R.; Akl, R. Securing industrial control systems: Components, cyber threats, and machine learning-driven defense strategies. Sensors 2023, 23, 8840. [Google Scholar] [CrossRef]
- Zhu, Q.; Zhang, G.; Luo, X.; Gan, C. An industrial virus propagation model based on SCADA system. Inf. Sci. 2023, 630, 546–566. [Google Scholar] [CrossRef]
- Wang, J.; Wang, N.; Wang, H.; Cao, K.; El-Sherbeeny, A.M. GCP: A multi-strategy improved wireless sensor network model for environmental monitoring. Comput. Netw. 2024, 254, 110807. [Google Scholar] [CrossRef]
- Wang, J.; Luo, D.; Peng, F.; Chen, W.; Liu, J.; Zhang, H. Wireless sensor deployment optimisation based on cost, coverage, connectivity, and load balancing. Int. J. Sens. Netw. 2023, 41, 126–135. [Google Scholar] [CrossRef]
- Irmak, E.; Erkek, İ. An overview of cyber-attack vectors on SCADA systems. In Proceedings of the 2018 6th International Symposium on Digital Forensic and Security (ISDFS), Antalya, Turkey, 22–25 March 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Knapp, E.D. Industrial Network Security: Securing Critical Infrastructure Networks for Smart Grid, SCADA, and Other Industrial Control Systems; Elsevier: Amsterdam, The Netherlands, 2024. [Google Scholar]
- Fu, Q.; Wang, J.; Si, C.; Liu, J. The Effect of Key Nodes on the Malware Dynamics in the Industrial Control Network. Comput. Mater. Contin. 2024, 79, 329. [Google Scholar] [CrossRef]
- Veblen, T.T. Regeneration dynamics. Plant Succession Theory Predict. 1992, 11, 152–187. [Google Scholar]
- Diekmann, O.; Heesterbeek, J.A.P.; Roberts, M.G. The construction of next-generation matrices for compartmental epidemic models. J. R. Soc. Interface 2010, 7, 873–885. [Google Scholar] [CrossRef]
- Yuan, H.; Chen, G. Network virus-epidemic model with the point-to-group information propagation. Appl. Math. Comput. 2008, 206, 357–367. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, F.; Wang, X. A class of SIR epidemic model with saturation incidence and age of infection. In Proceedings of the Eighth ACIS International Conference on Software Engineering, Artificial Intelligence, Networking, and Parallel/Distributed Computing (SNPD 2007), Qingdao, China, 30 July 2007; IEEE: Piscataway, NJ, USA, 2007; Volume 1, pp. 146–149. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | a | b | p | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Model | ||||||||||||||||
| SLBR | 1.52 | 0.35 | — | 0.2 | 0.4 | 0.2 | 0.18 | — | — | — | — | 0.1 | — | — | ||
| SEIQP | 1.58 | 0.6 | — | — | 0.3 | — | — | 0.15 | 0.3 | — | 0.2 | 0.3 | 0.2 | 0.04 | 0.15 | |
| SMIQR | 1.51 | 0.35 | 1 | 0.2 | 0.1 | 0.2 | 0.3 | 0.1 | 0.9 | 0.7 | — | — | — | — | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Tang, J.; Li, C.; Ma, Z.; Yang, J.; Fu, Q. Modeling and Analysis in the Industrial Internet with Dual Delay and Nonlinear Infection Rate. Electronics 2025, 14, 2058. https://doi.org/10.3390/electronics14102058
Wang J, Tang J, Li C, Ma Z, Yang J, Fu Q. Modeling and Analysis in the Industrial Internet with Dual Delay and Nonlinear Infection Rate. Electronics. 2025; 14(10):2058. https://doi.org/10.3390/electronics14102058
Chicago/Turabian StyleWang, Jun, Jun Tang, Changxin Li, Zhiqiang Ma, Jie Yang, and Qiang Fu. 2025. "Modeling and Analysis in the Industrial Internet with Dual Delay and Nonlinear Infection Rate" Electronics 14, no. 10: 2058. https://doi.org/10.3390/electronics14102058
APA StyleWang, J., Tang, J., Li, C., Ma, Z., Yang, J., & Fu, Q. (2025). Modeling and Analysis in the Industrial Internet with Dual Delay and Nonlinear Infection Rate. Electronics, 14(10), 2058. https://doi.org/10.3390/electronics14102058