Optimal Layout Planning of Electric Vehicle Charging Stations Considering Road–Electricity Coupling Effects


Abstract
1. Introduction
2. Electric Vehicle Charging Station Model
- (1)
- Input parameters such as the battery capacity and variance of the EV, and calculate the number N of EVs at the i-th moment of the EVCS;
- (2)
- Classify the EVs at the i-th moment in accordance with the distribution of the starting charging time.
- (3)
- Based on the distribution of the initial state of charge (SOC) of various types of EV batteries, randomly generate the initial SOC, and calculate the required charging capacity in accordance with Equation (5):where C is the battery capacity of the EV and P is the charging power of the EV.
- (4)
- Return to the second step and repeat the aforementioned steps to acquire the charging load of various types of EVs within a day.
- (5)
- Superimpose the EV charging load curves to obtain the total charging load curve of the EVCS.
3. Research Scheme of Multi-Objective Optimization for Electric Vehicle Charging Stations Based on Regulatory Benefits
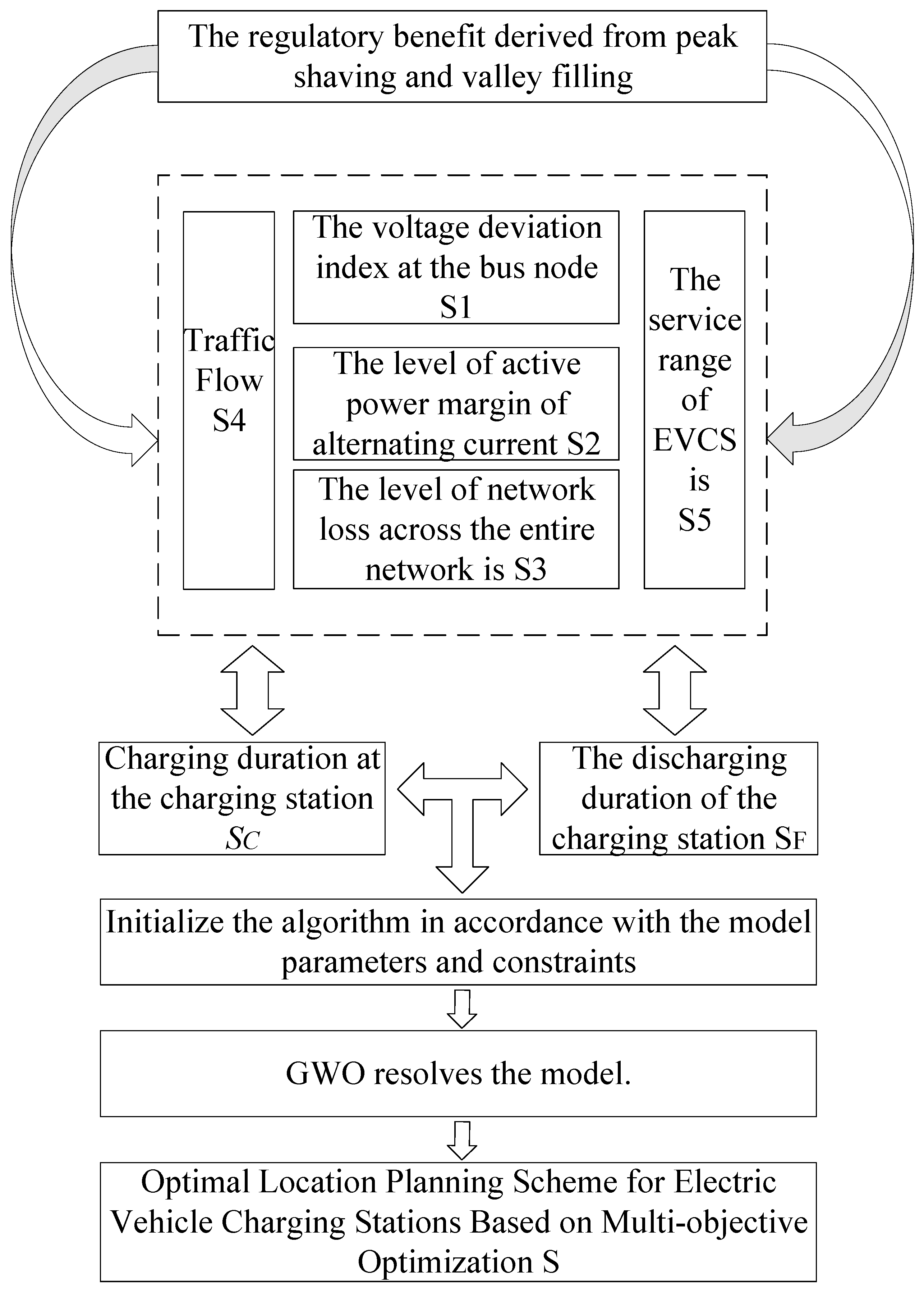
3.1. EVCS Multi-Objective Optimization Scheme
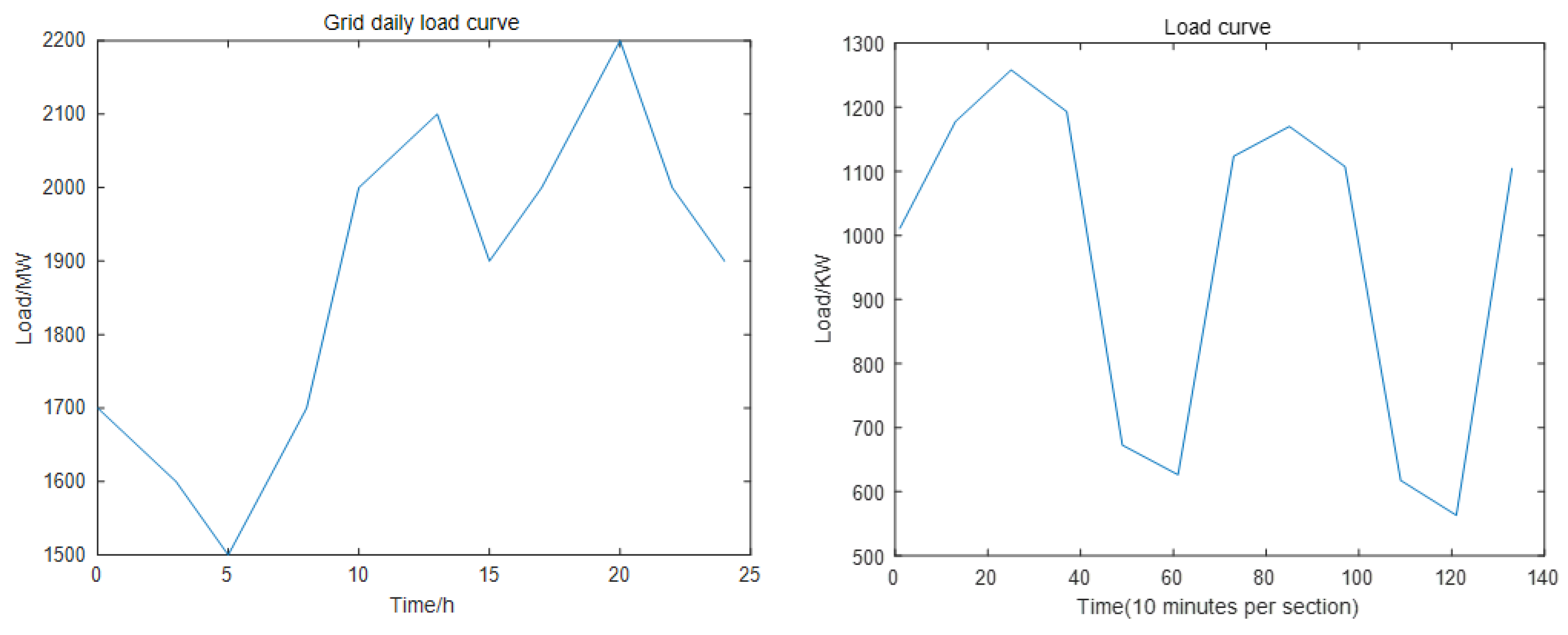
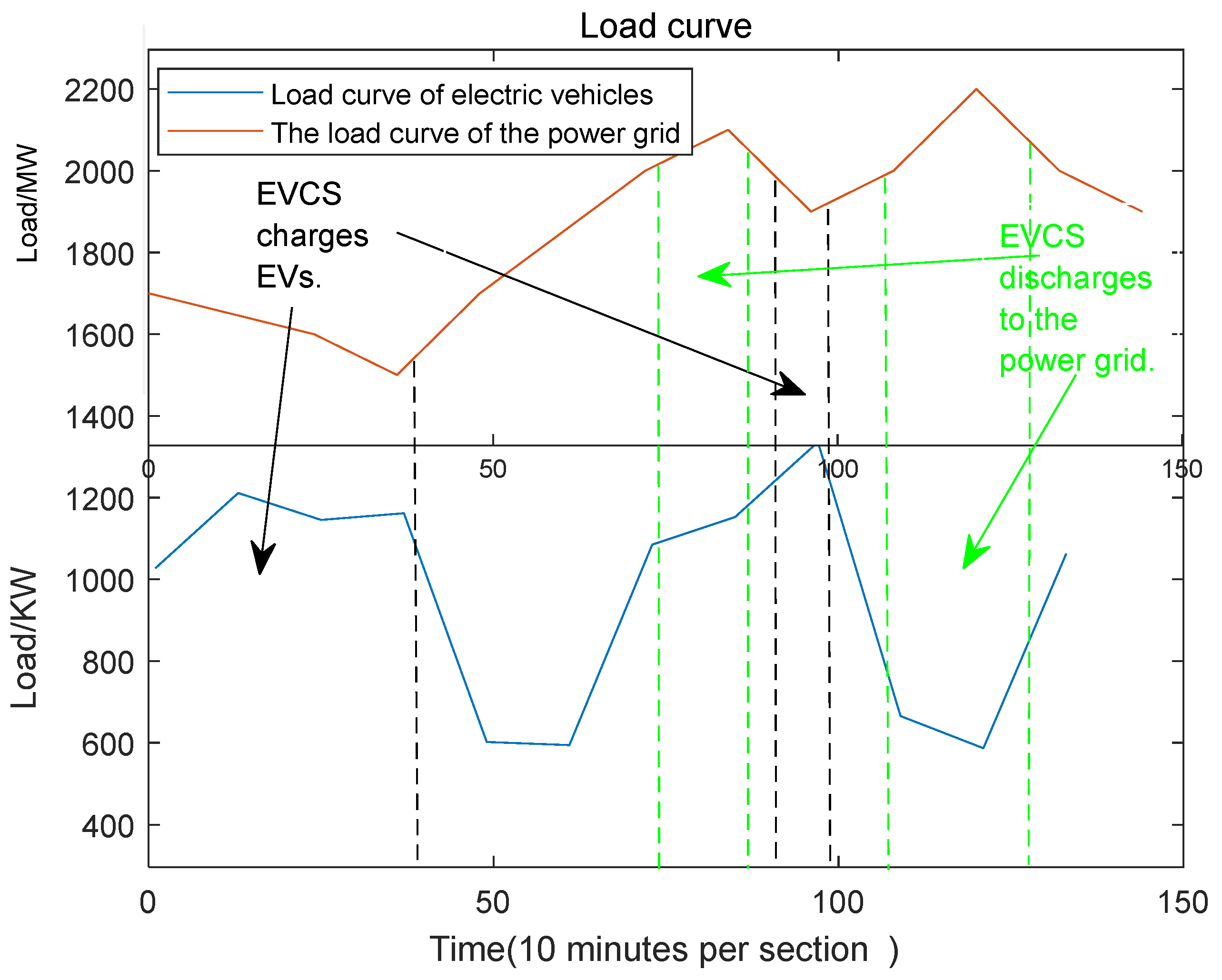
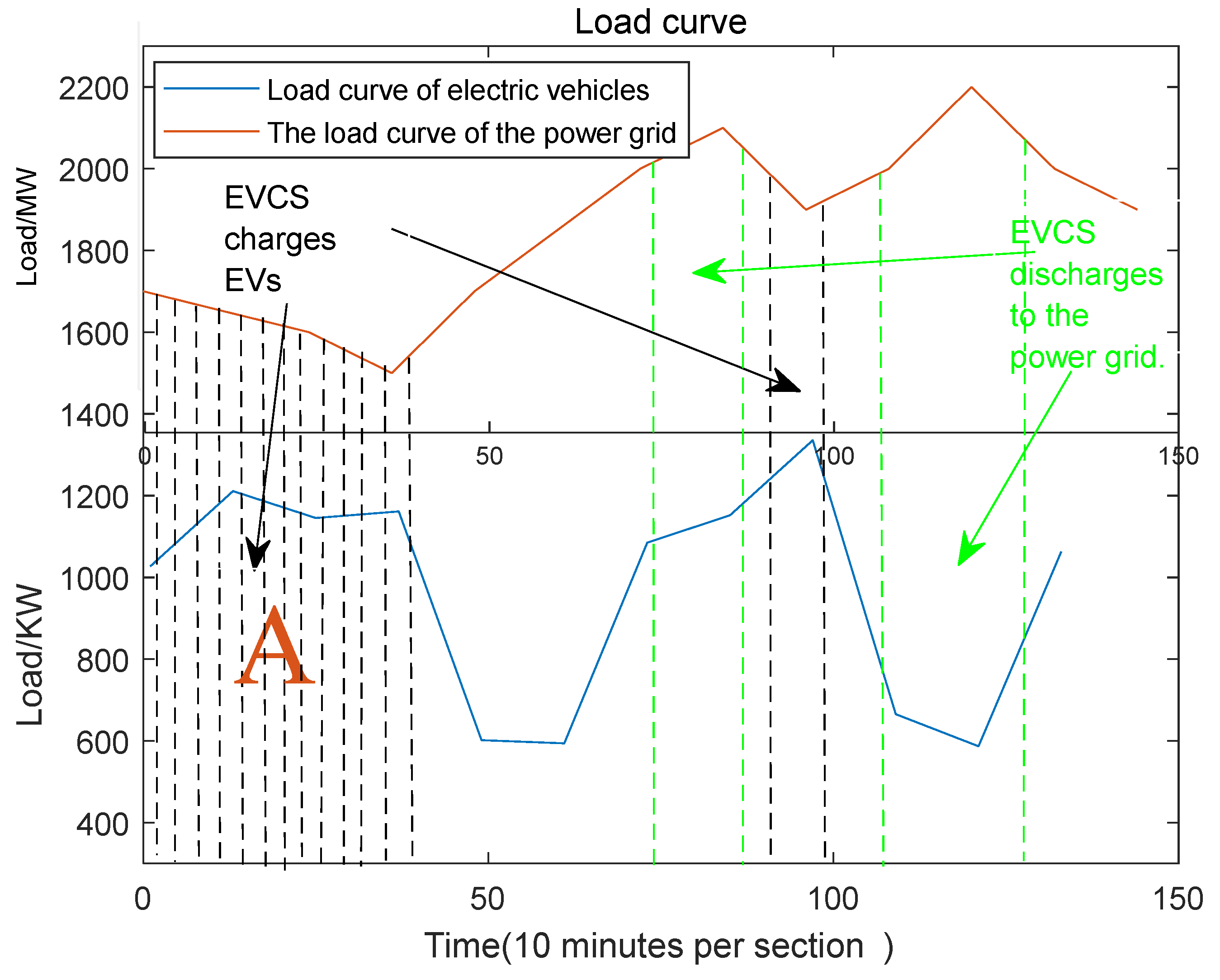
3.2. The Regulatory Benefit Derived from Peak Shaving and Valley Filling
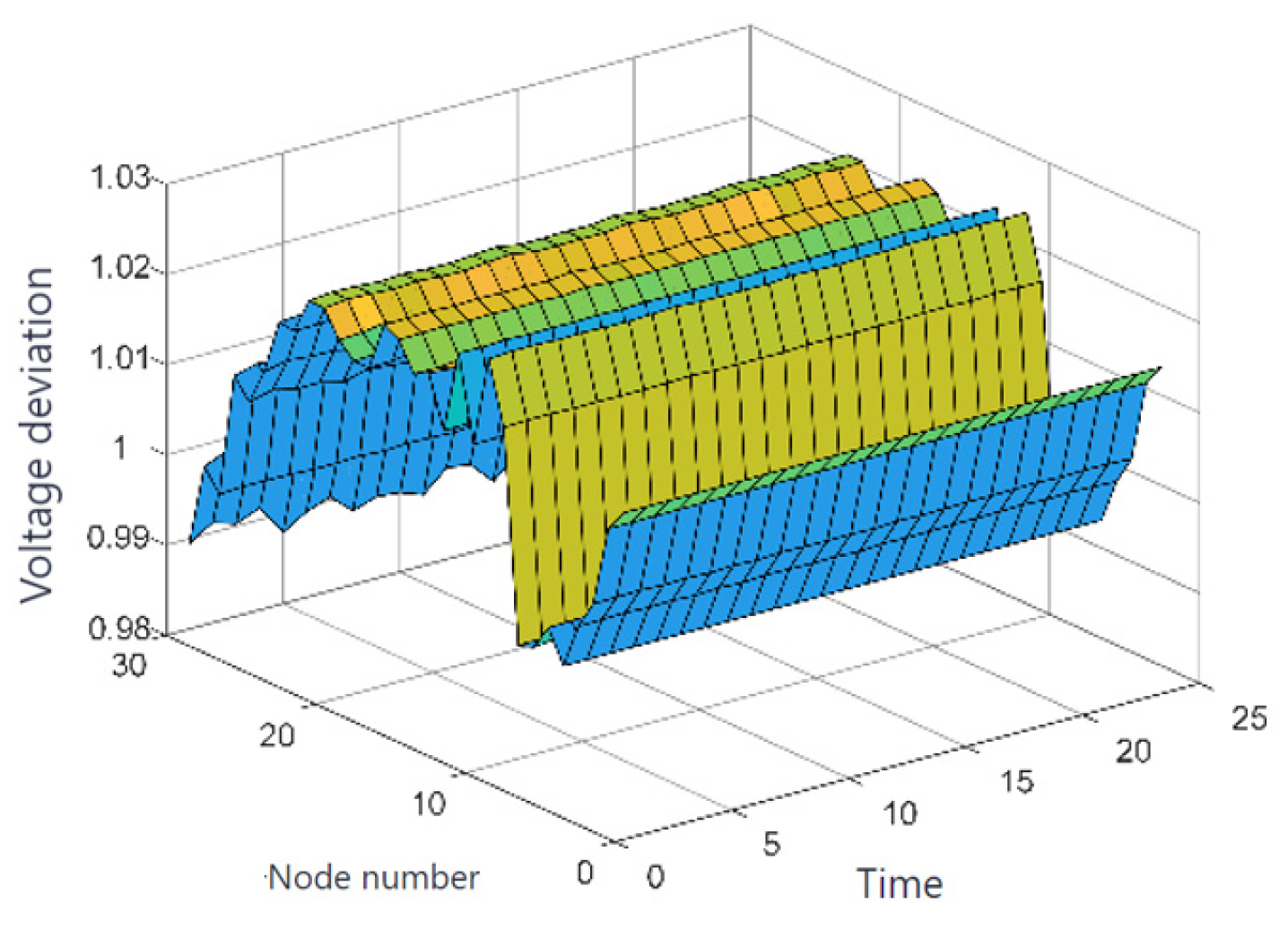
3.3. Index of Voltage Deviation at the Bus Node
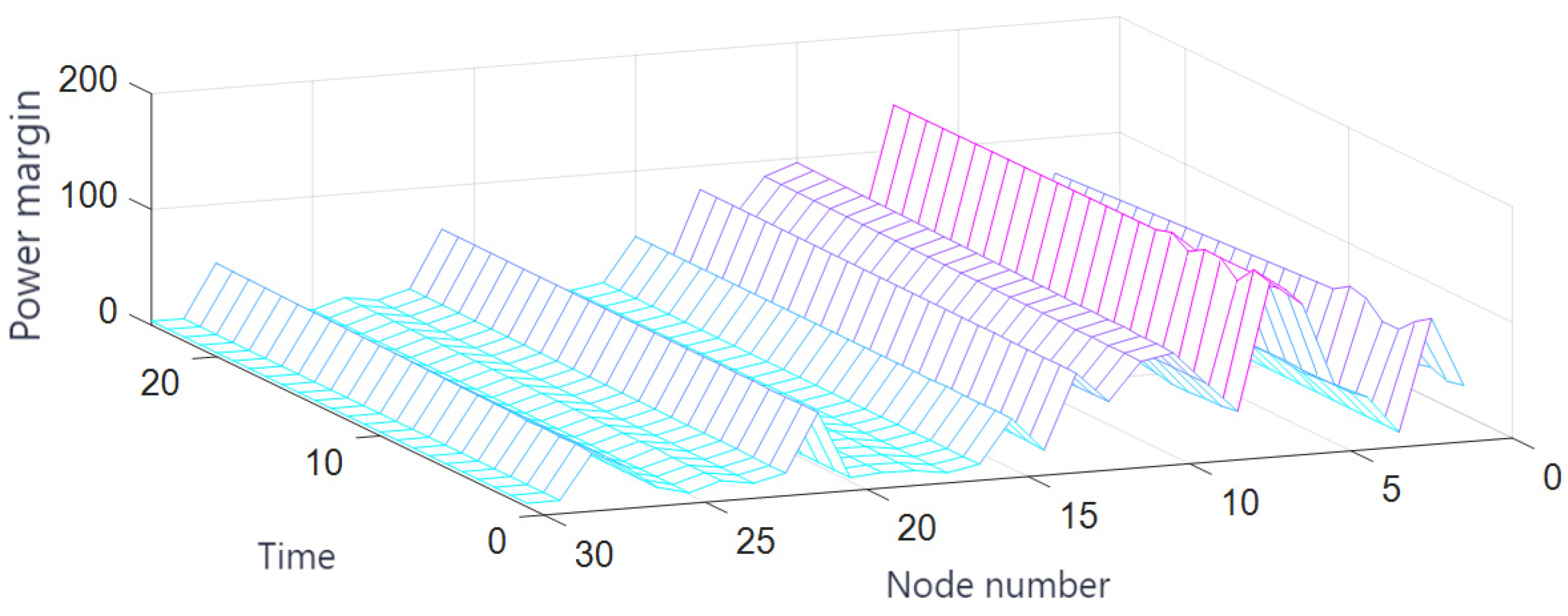
3.4. Active Power Margin Level of AC Power
3.5. The Extent of Power Loss Across the Entire Network
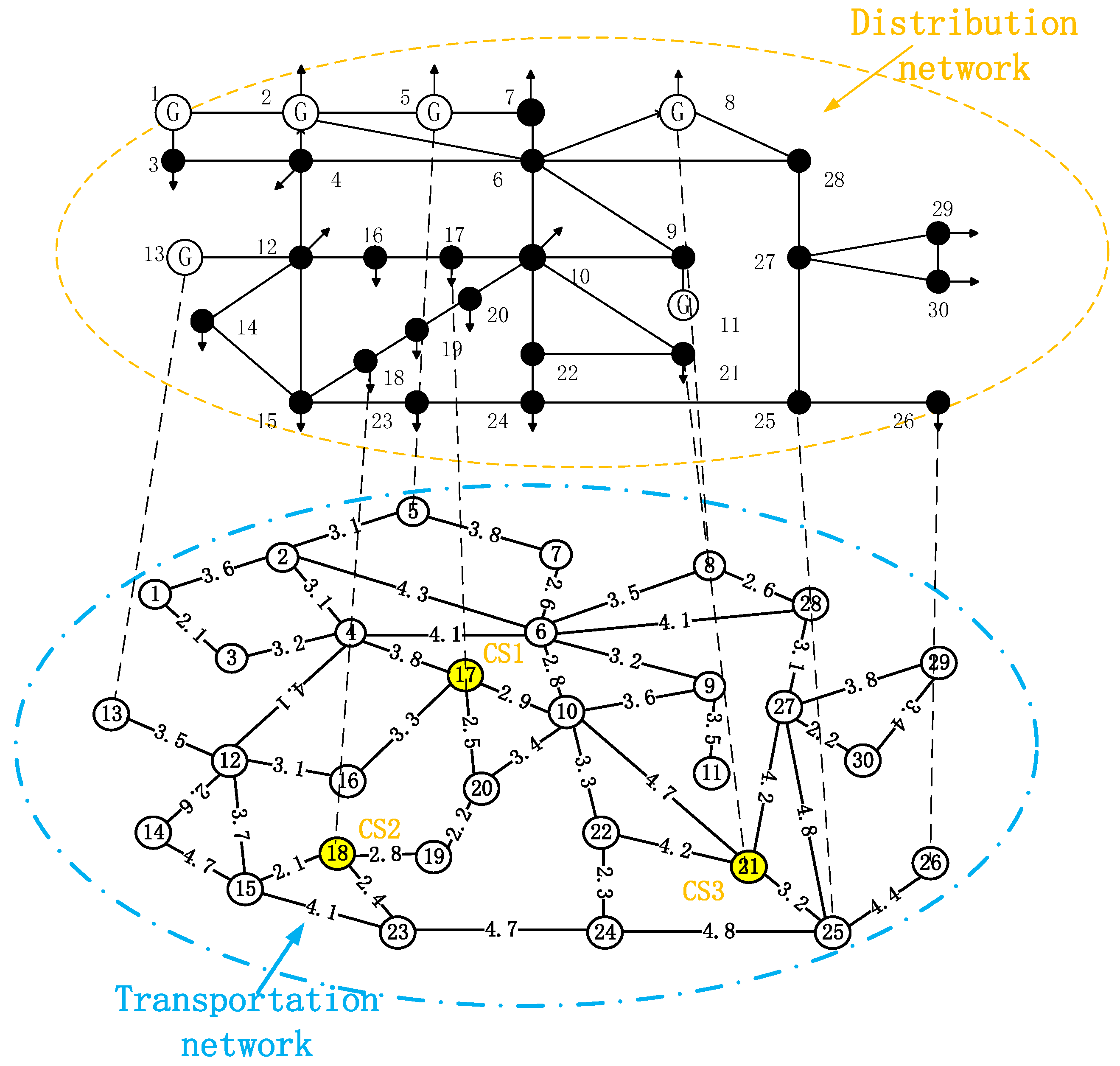
3.6. Traffic Flux
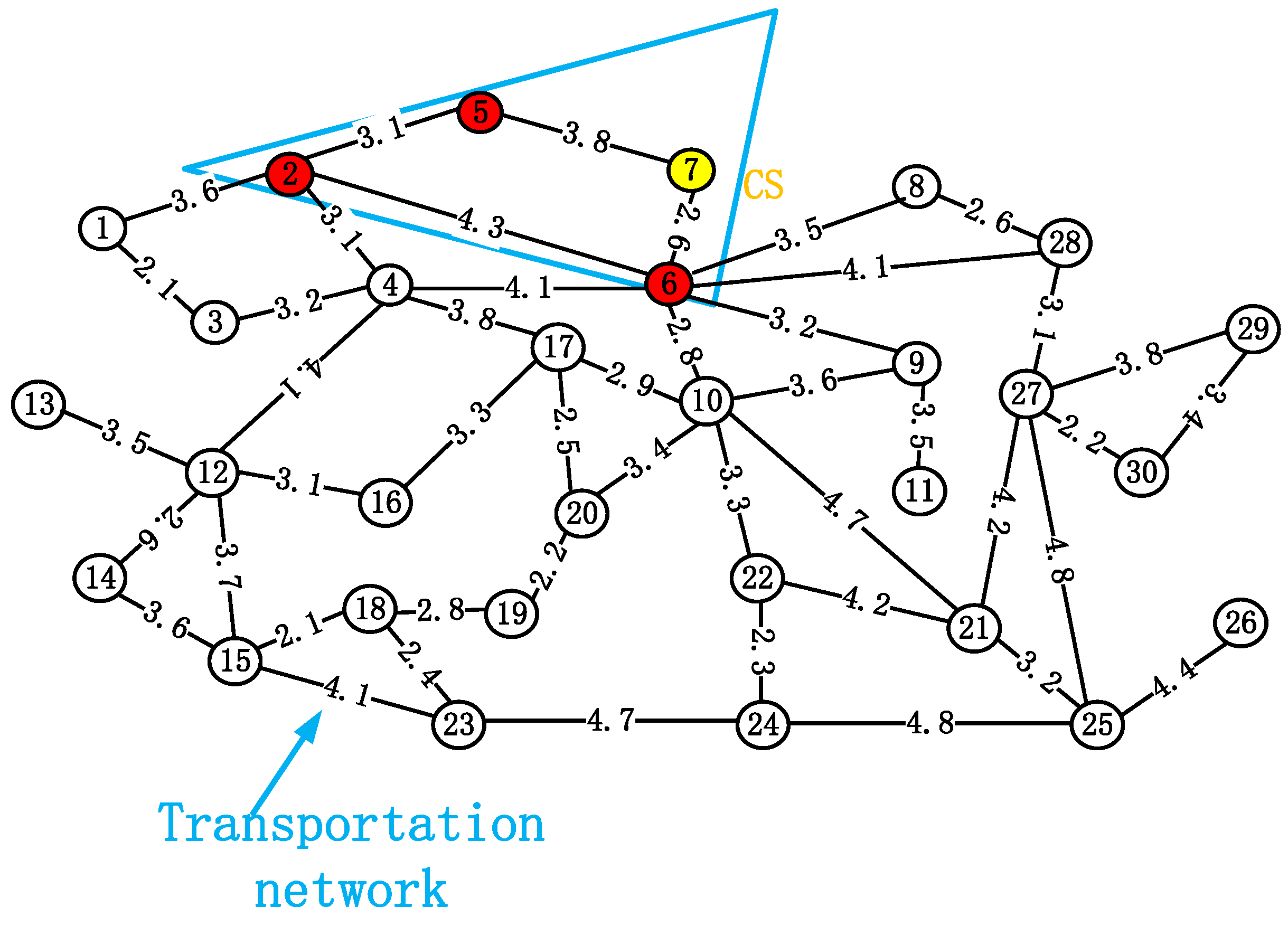
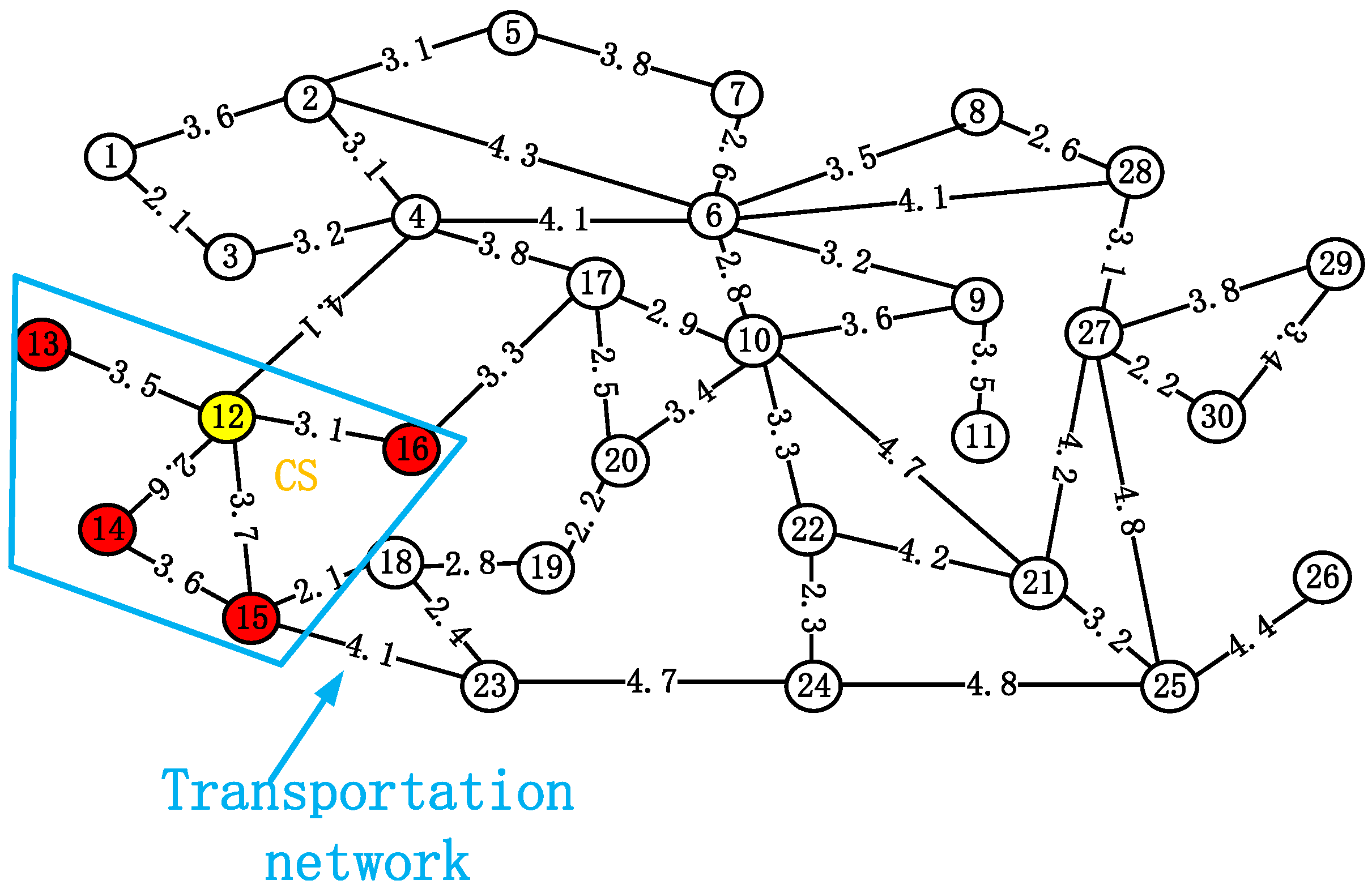
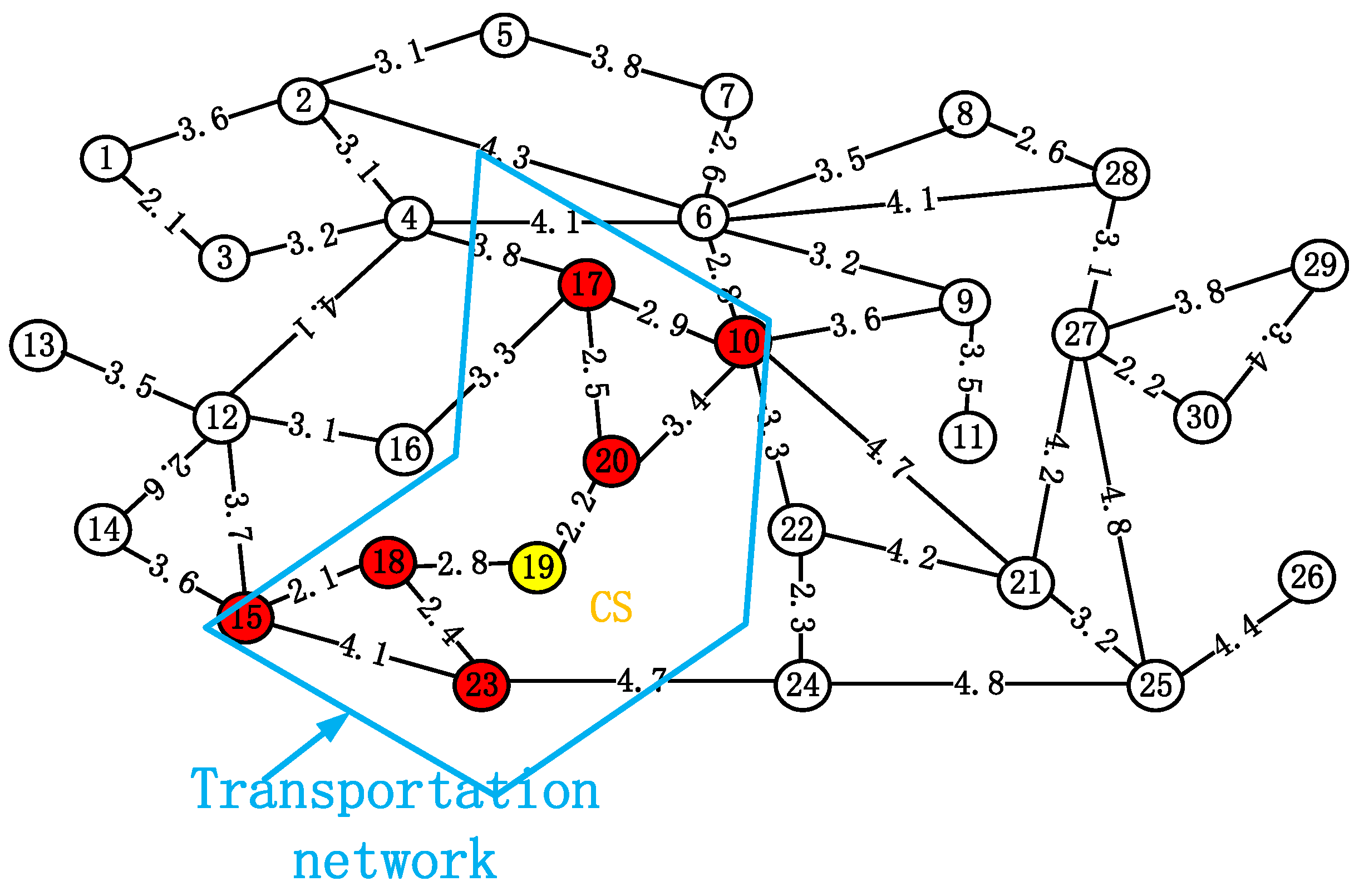
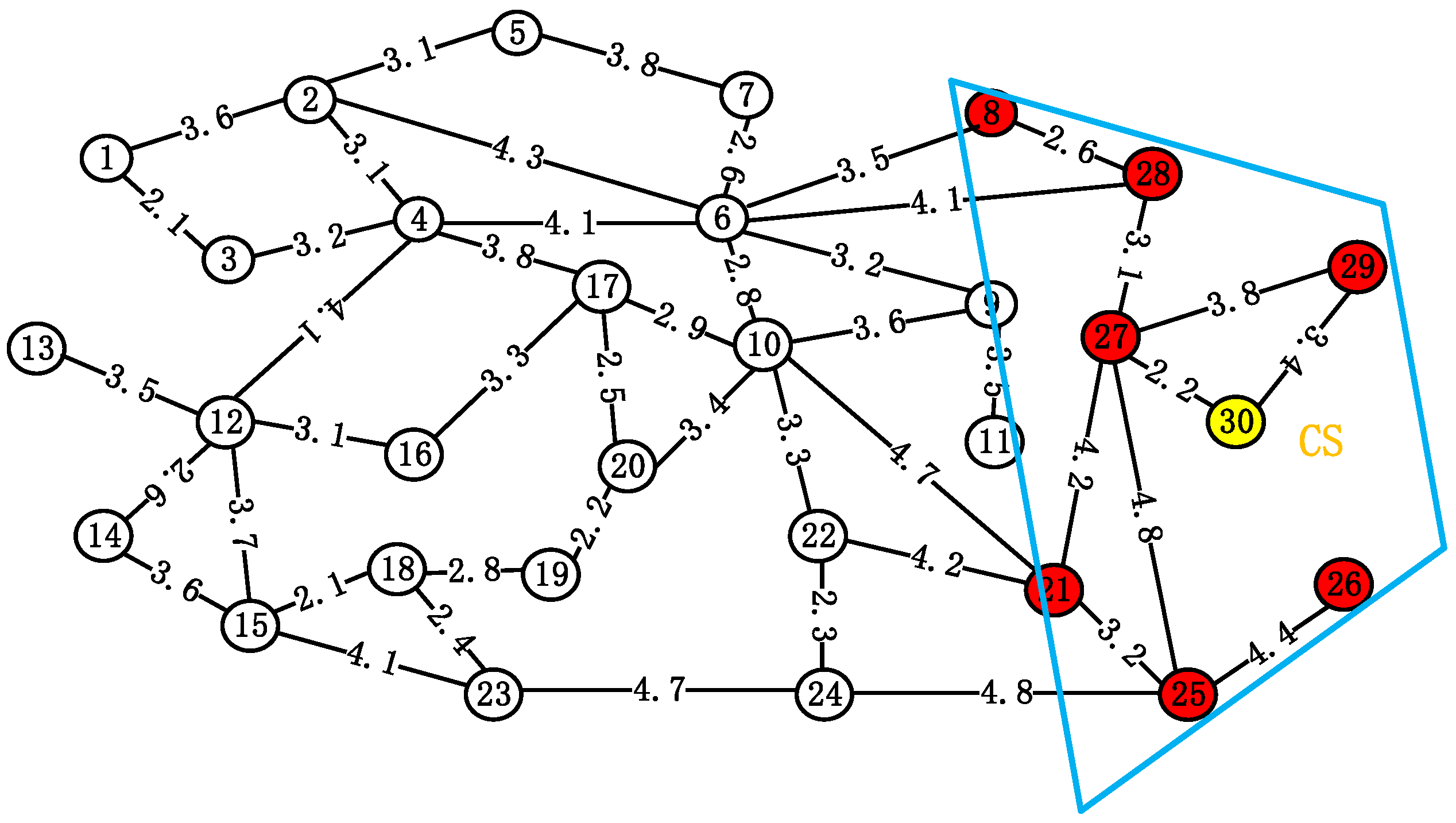
3.7. The Scope of Services Provided by the Charging Station
3.8. Constraint Conditions
- (1)
- Voltage constraints at nodes:where Ui,tmax and Ui,tmin represent the maximum and minimum values of the voltage at node i at time t.
- (2)
- Constraints on branch capacity:where Pij and Qij represent the active and reactive powers on the branch, and Sijmax is the maximum capacity permitted for the branch.
- (3)
- Constraints on the quantity of EV charging and total demand:where NEV_m represents the charging quantity of EVs in the m-th EVCS, NEVCS_m indicates the number of permitted charging stations in the m-th EVCS, V stands for the quantity of charging piles in the EVCS, SCDZ denotes the capacity of the charging piles, and SEV represents the capacity of the EVs.
- (4)
- Constraint of the power balance equation:where Pi and Qi represent the active and reactive power input at node i; PLi and QLi denote the active and reactive power of the load at node i; Gij and Bij signify the conductance and susceptance of the branch; Ui and Uj stand for the node voltages at nodes i and j; PDGi and QDGi indicate the active and reactive power injected by the DG to node i; and θij represents the phase angle difference of the voltage.
- (5)
- Constraints regarding the number of charging stations:where ni_EVCS represents the number of EVCSs at node i. During the planning process, only one EVCS can be constructed at each road network node.
- (6)
- Constraints on the service scope of electric vehicle charging stations:where NEVCS_m represents the number of nodes encompassed within the influence range of the m-th EVCS.
- (7)
- Constraints on the degree of coincidence of EVCSs:where NEVCS_m and NEVCS_s represent the quantities of nodes encompassed within the influence range of the m-th and s-th EVCSs, respectively, that is, the service range of EVCSs, and ξ indicates the number of identical nodes within the service ranges of the two EVCS, namely, the degree of overlap. In the planning scheme of this paper, the degree of overlap of each EVCS should not be overly high.
- (8)
- Constraint regarding the investment capacity of the energy storage system:where and represent, respectively, the lower limit and upper limit of the investment capacity Eb of the energy storage system.
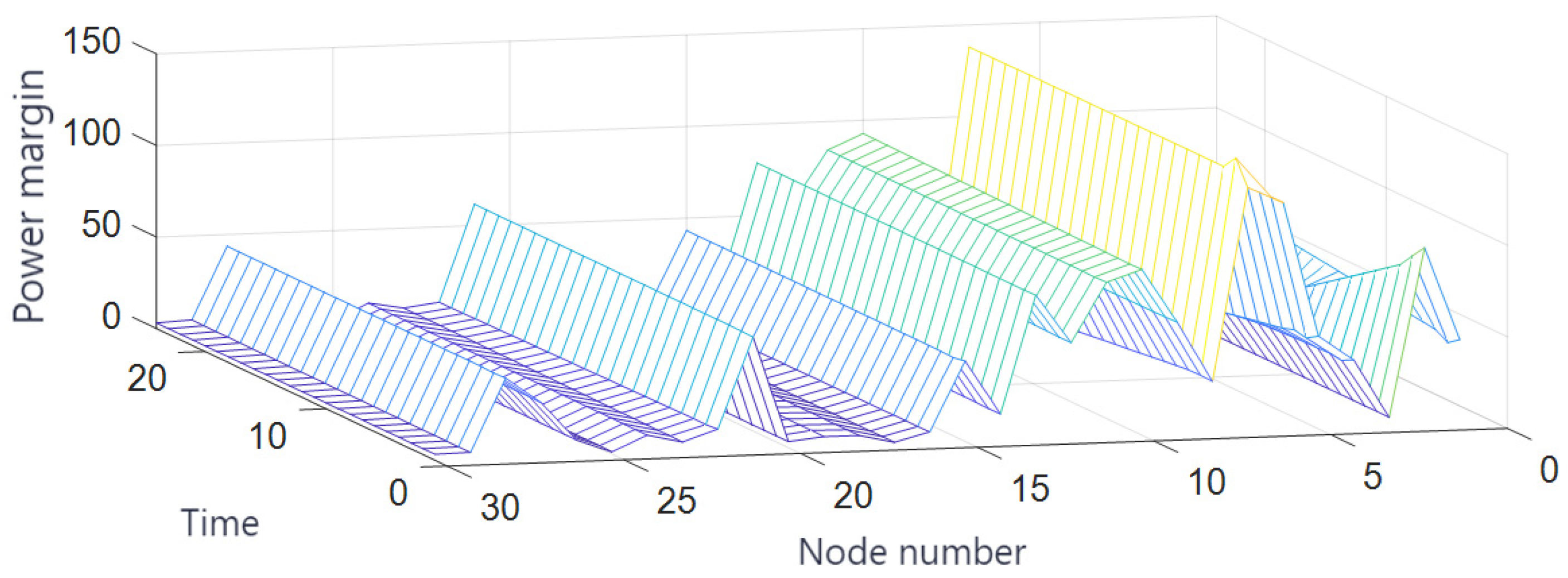
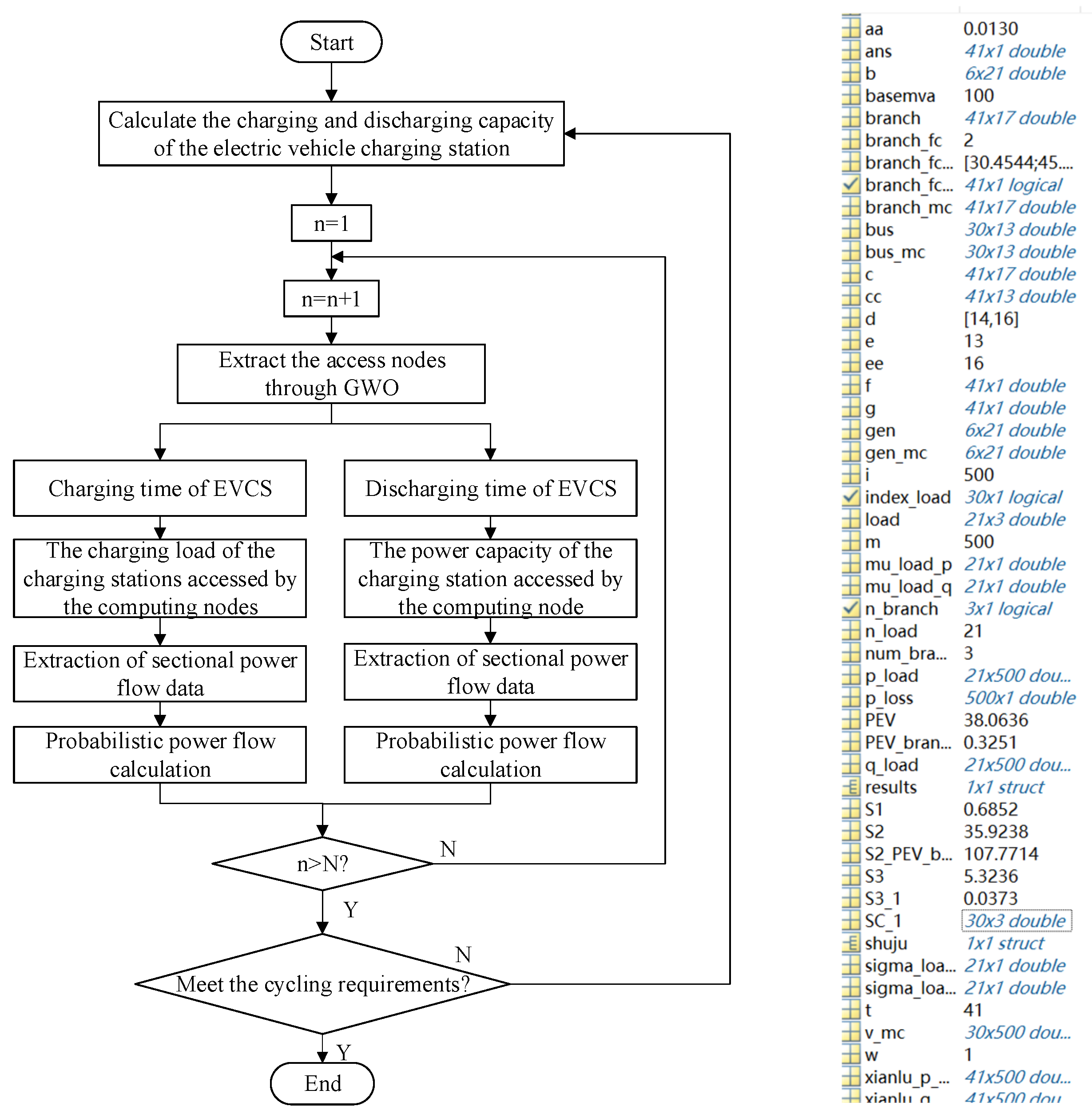
4. Dynamic Data Extraction of the Distribution Network Based on Time-Segmented Power Flow
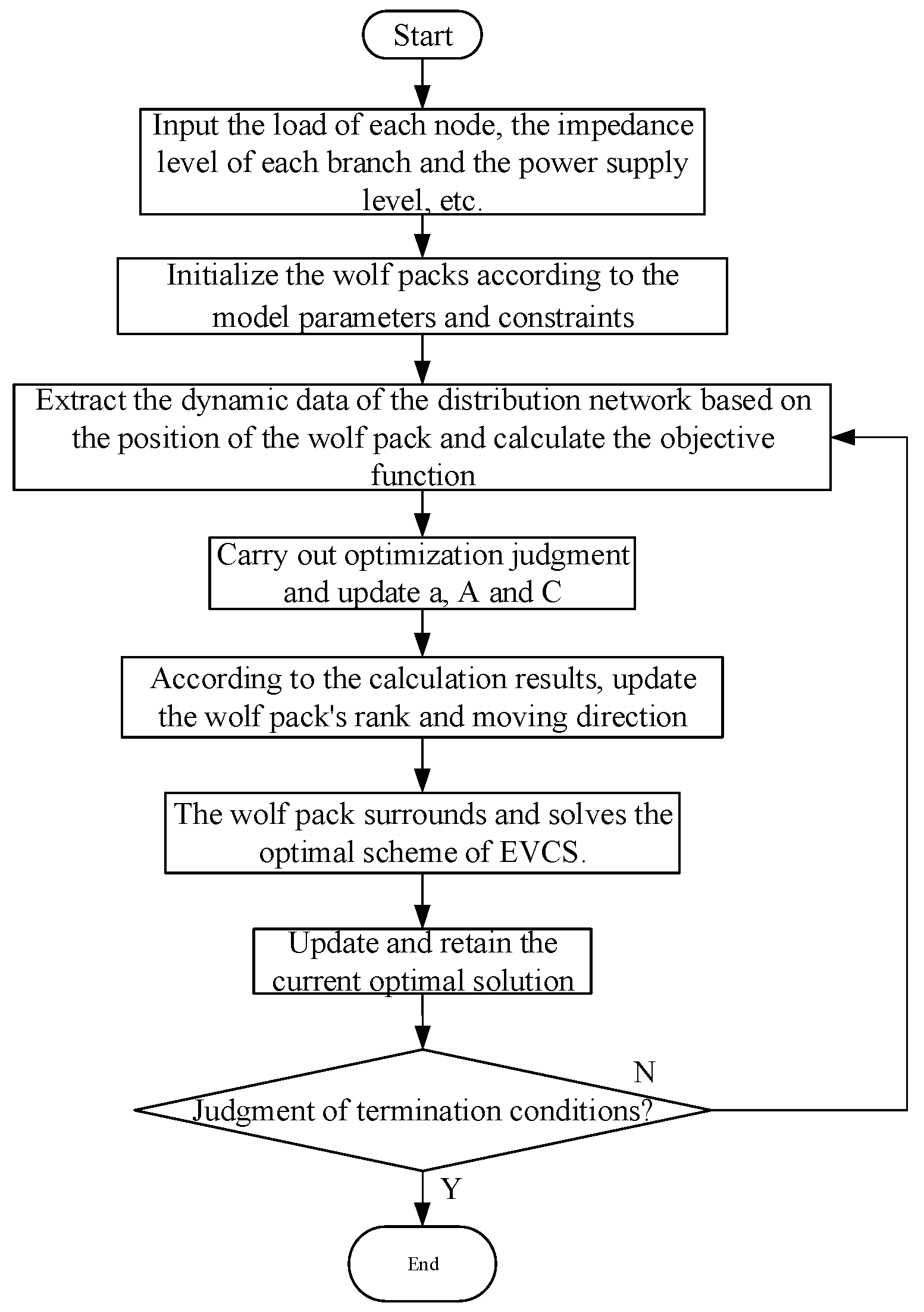
5. Solution to Optimization Scheme of Electric Vehicle Charging Stations Based on Gray Wolf Algorithm
5.1. The Classification of Wolves Within a Group
5.2. Surrounding the Quarry
5.3. Aggressive Behavior
5.4. Solution of the Optimization Scheme for Electric Vehicle Charging Stations Based on the Gray Wolf Algorithm
6. Simulation Analysis
- (1)
- The number of EVs has attained a certain scale, and the EVCS can perpetually remain in normal operation.
- (2)
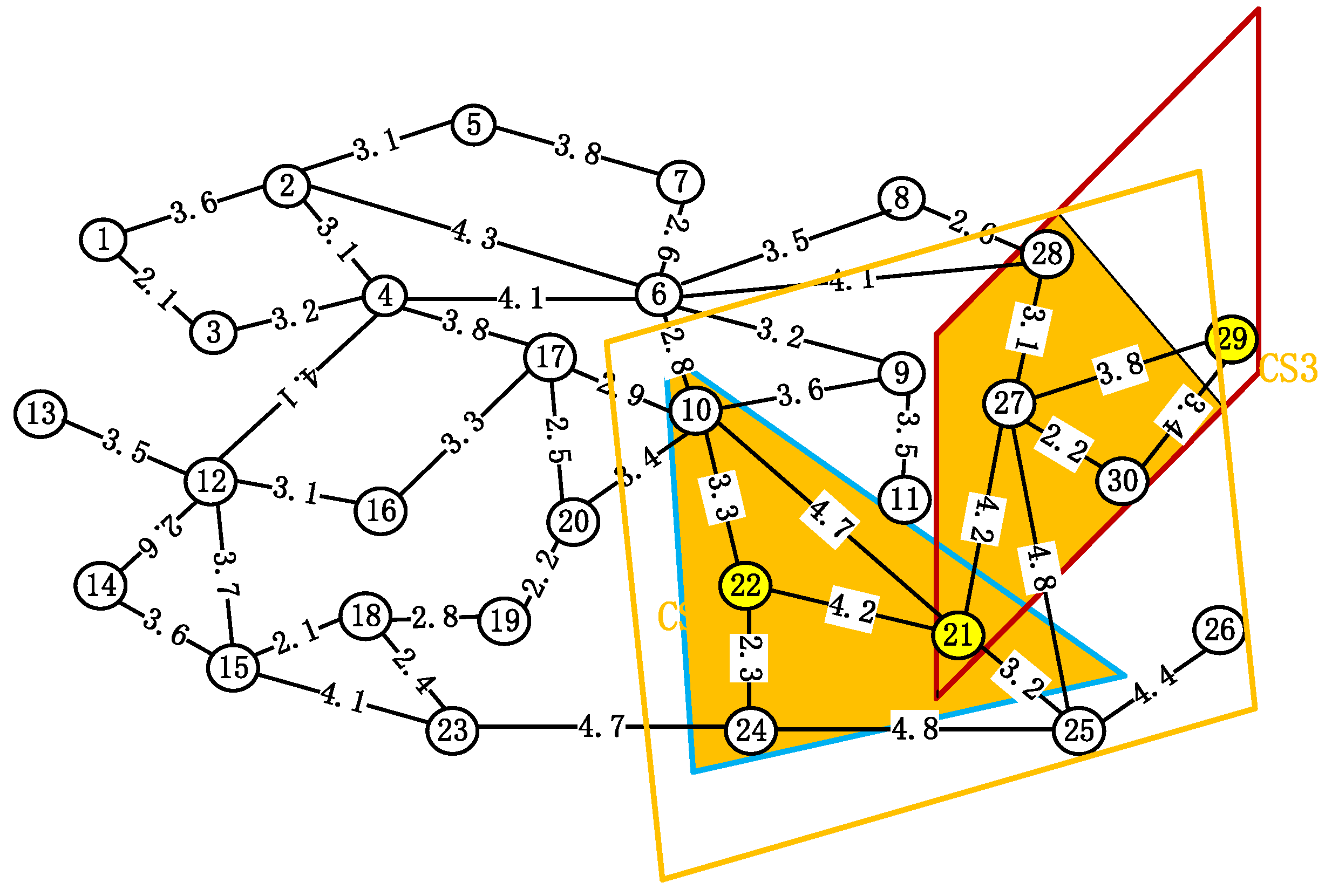
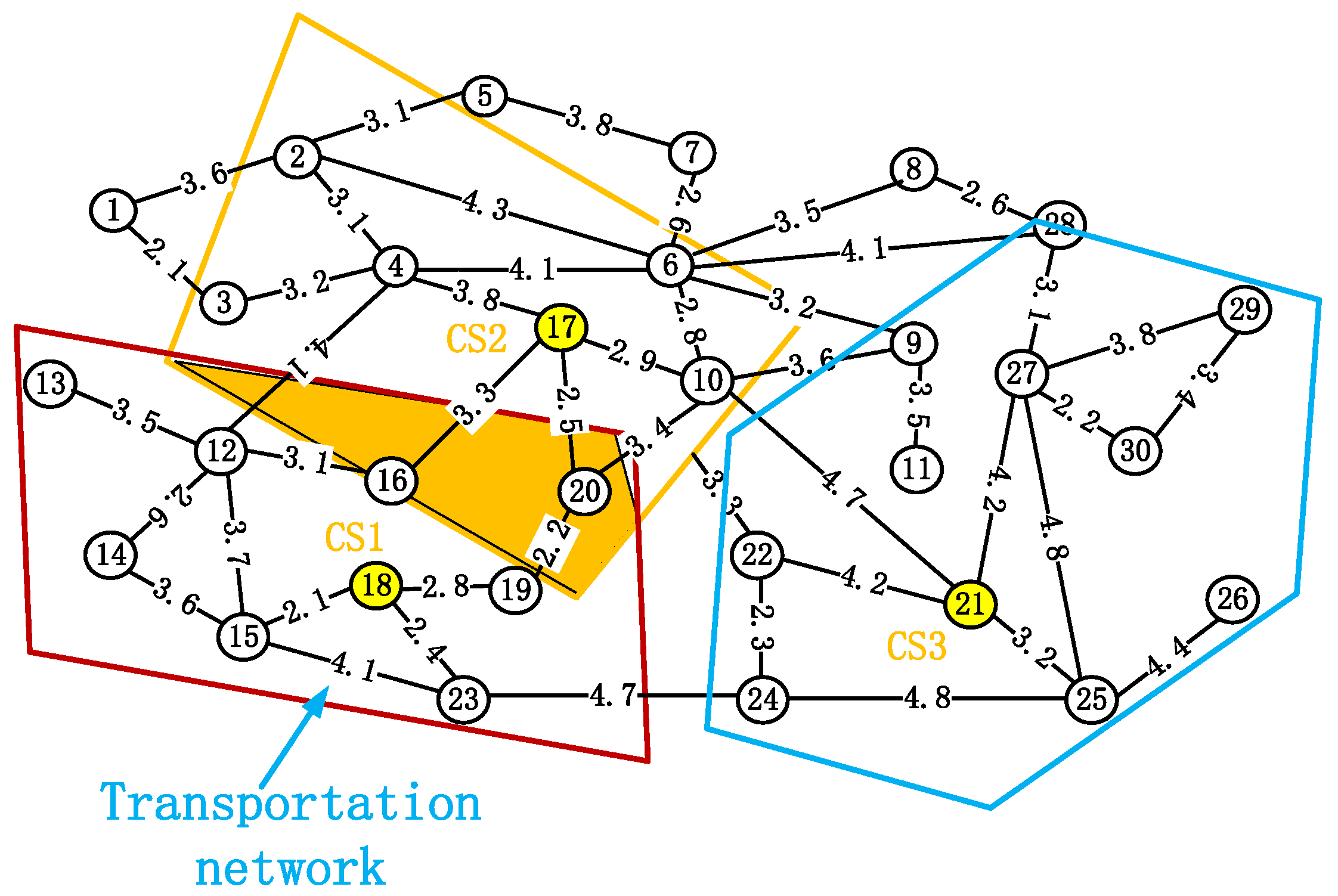
- The IEEE-30 node standard example is adopted herein, and the data are in accordance with the example.
- (3)
- Based on the simulation results of the EV daily load curve, the capacity of the EVCS is 1.3 MW; the backup energy storage power supply is 1.3 MW; for the charging time and the discharging time, the output is 1.3 MW; the expected SOC is 1; and the charging pile efficiency η is taken as 0.95.
- (4)
- The charging process in this paper is simplified to the constant power characteristic, and the conventional charging power is taken as 3 KW and the fast charging power is taken as 48 KW.
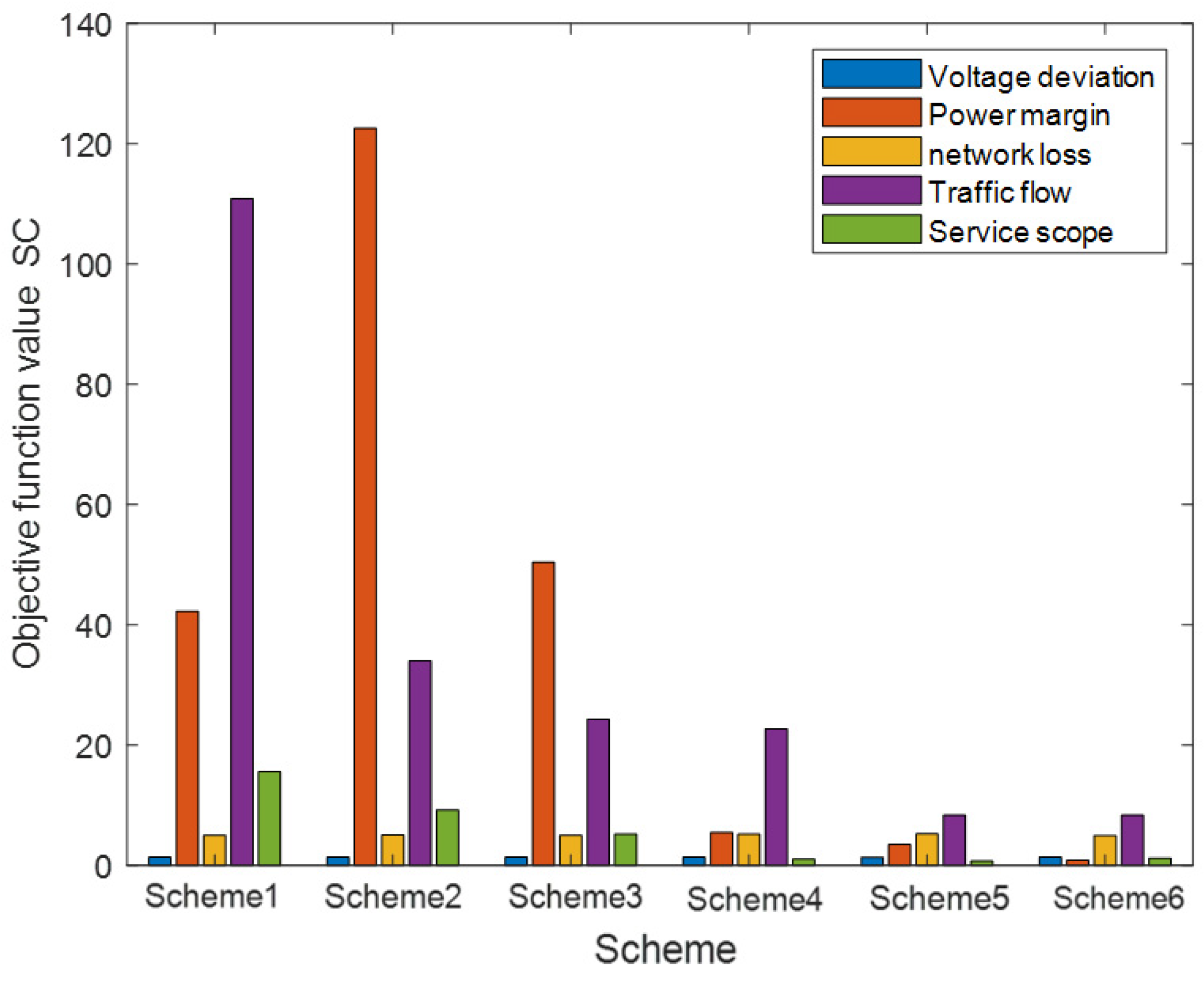
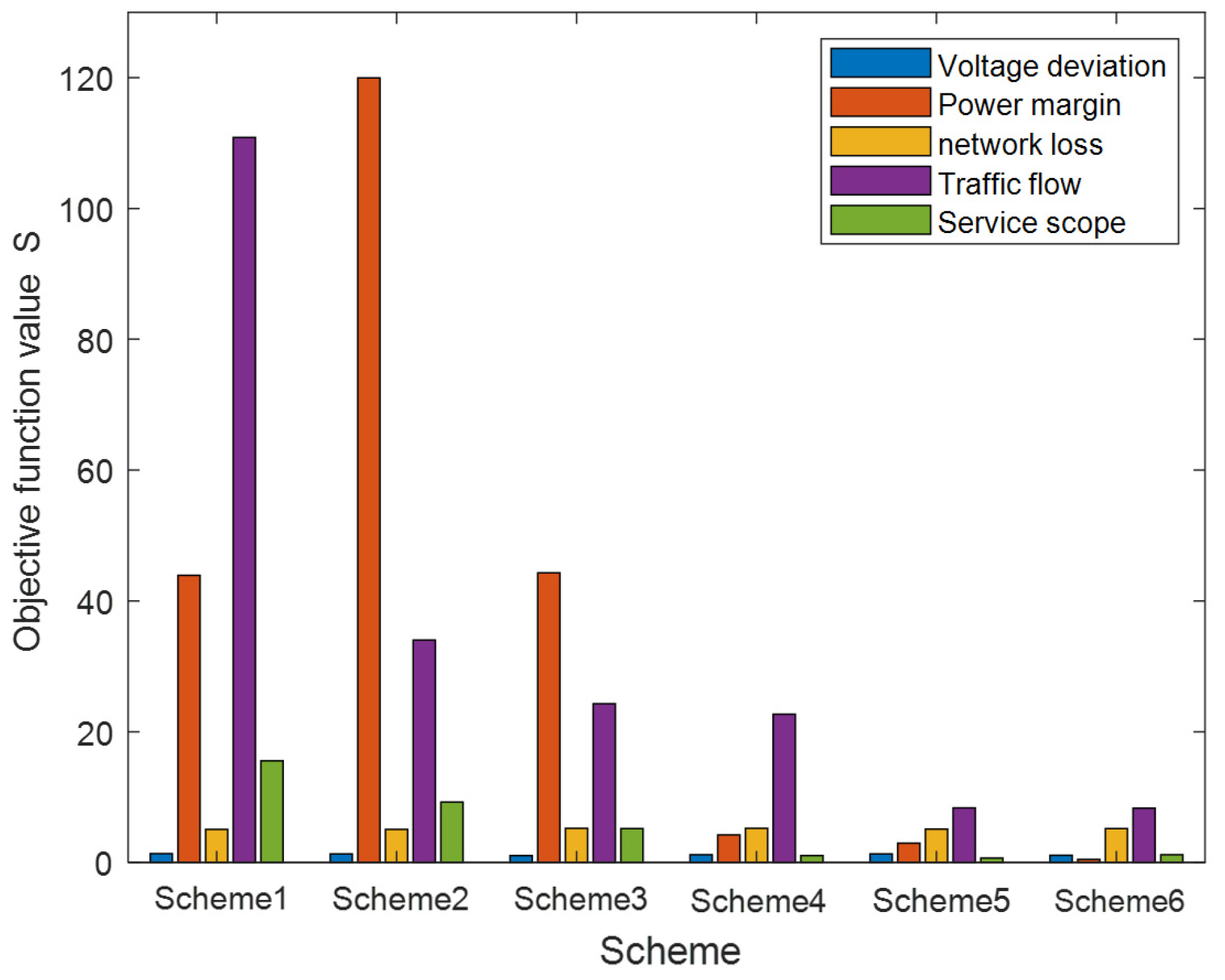
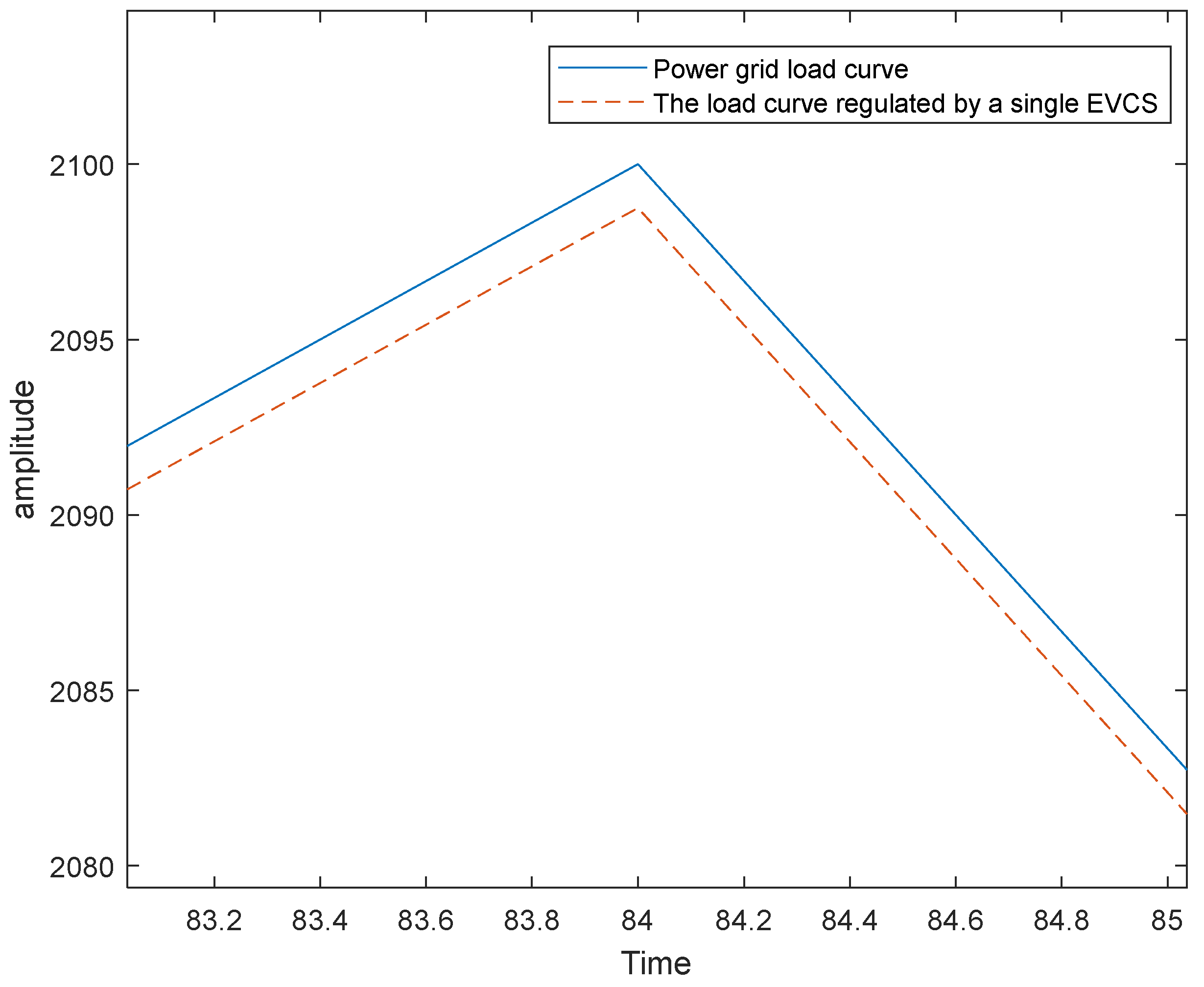
6.1. Planning Scheme for Single-Charge Station
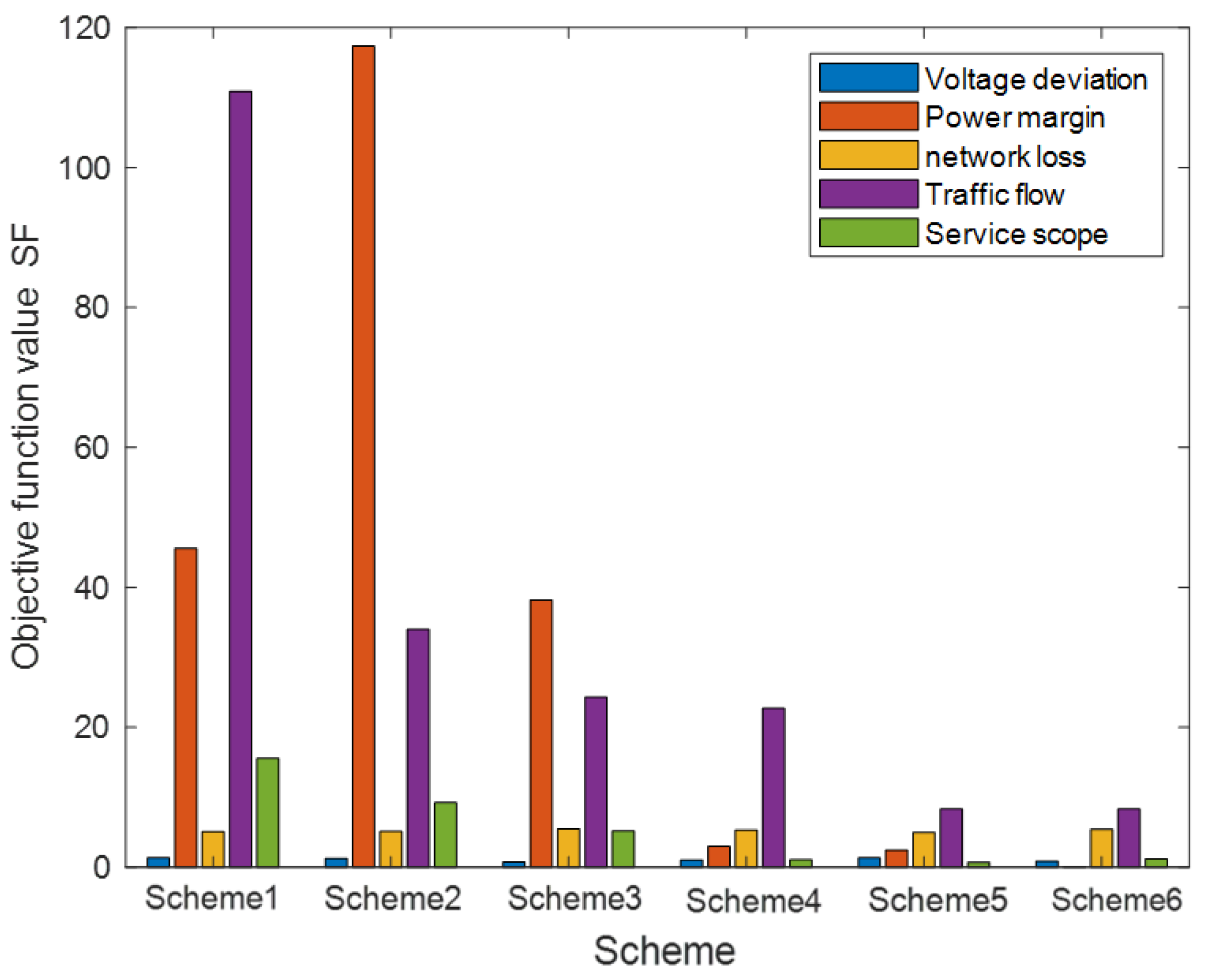
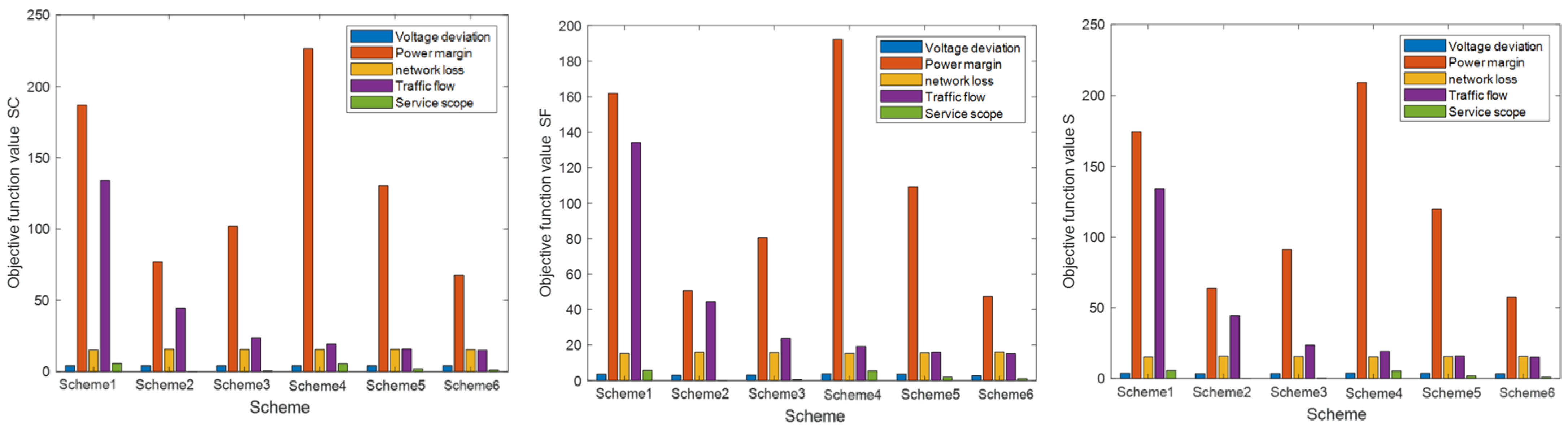
6.2. Schemes for Planning Multiple Charging Stations
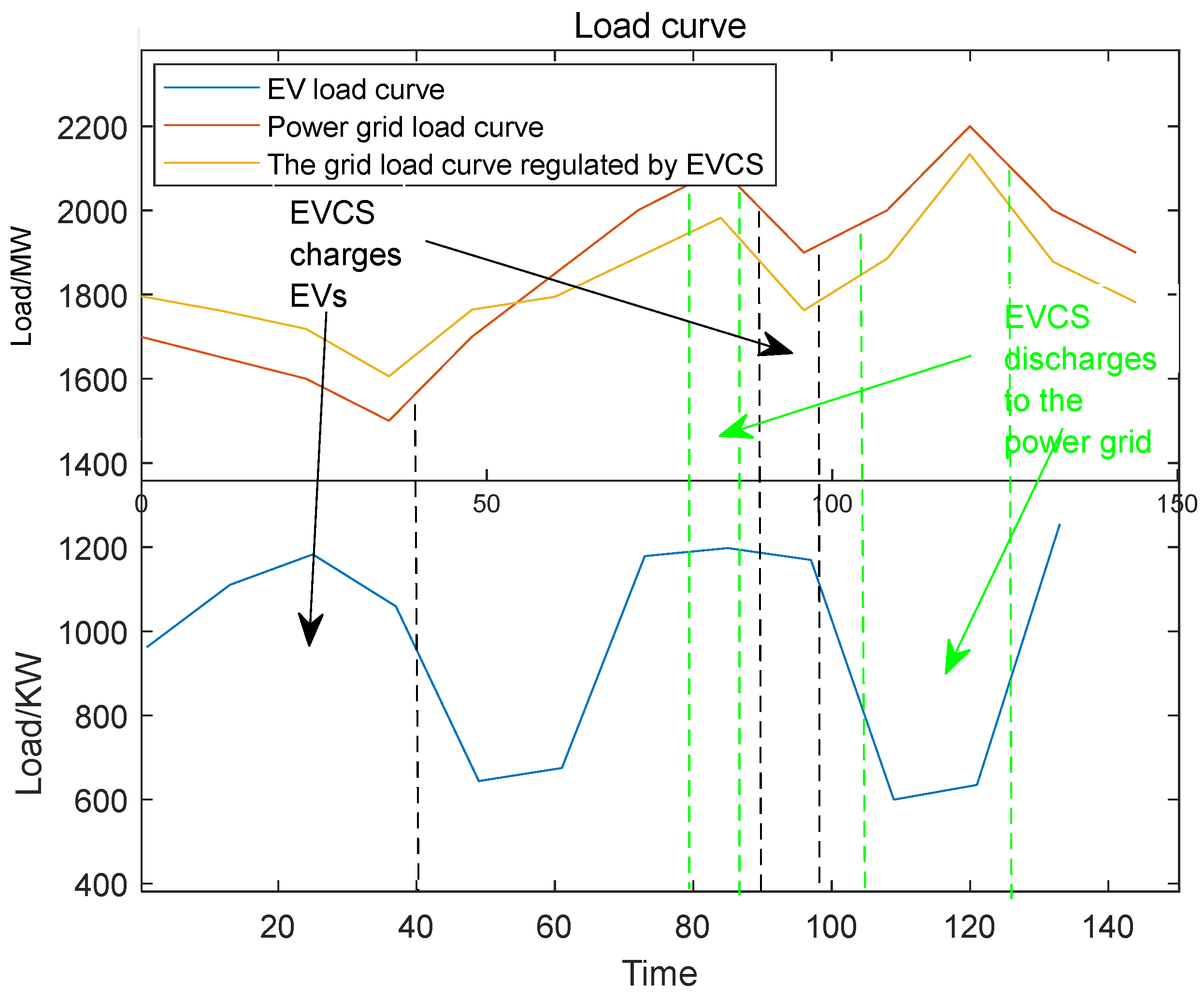
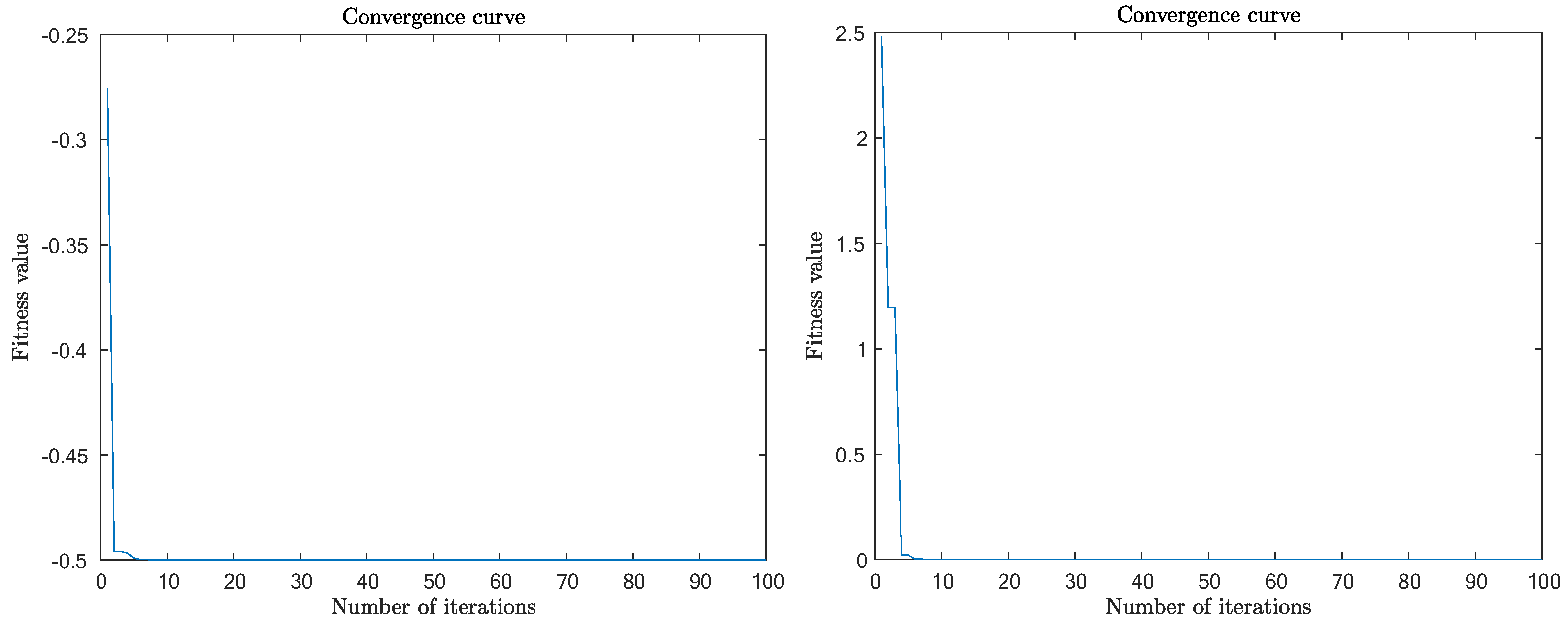
6.3. Simulation of Regulatory Benefits Based on Peak Shaving and Valley Filling
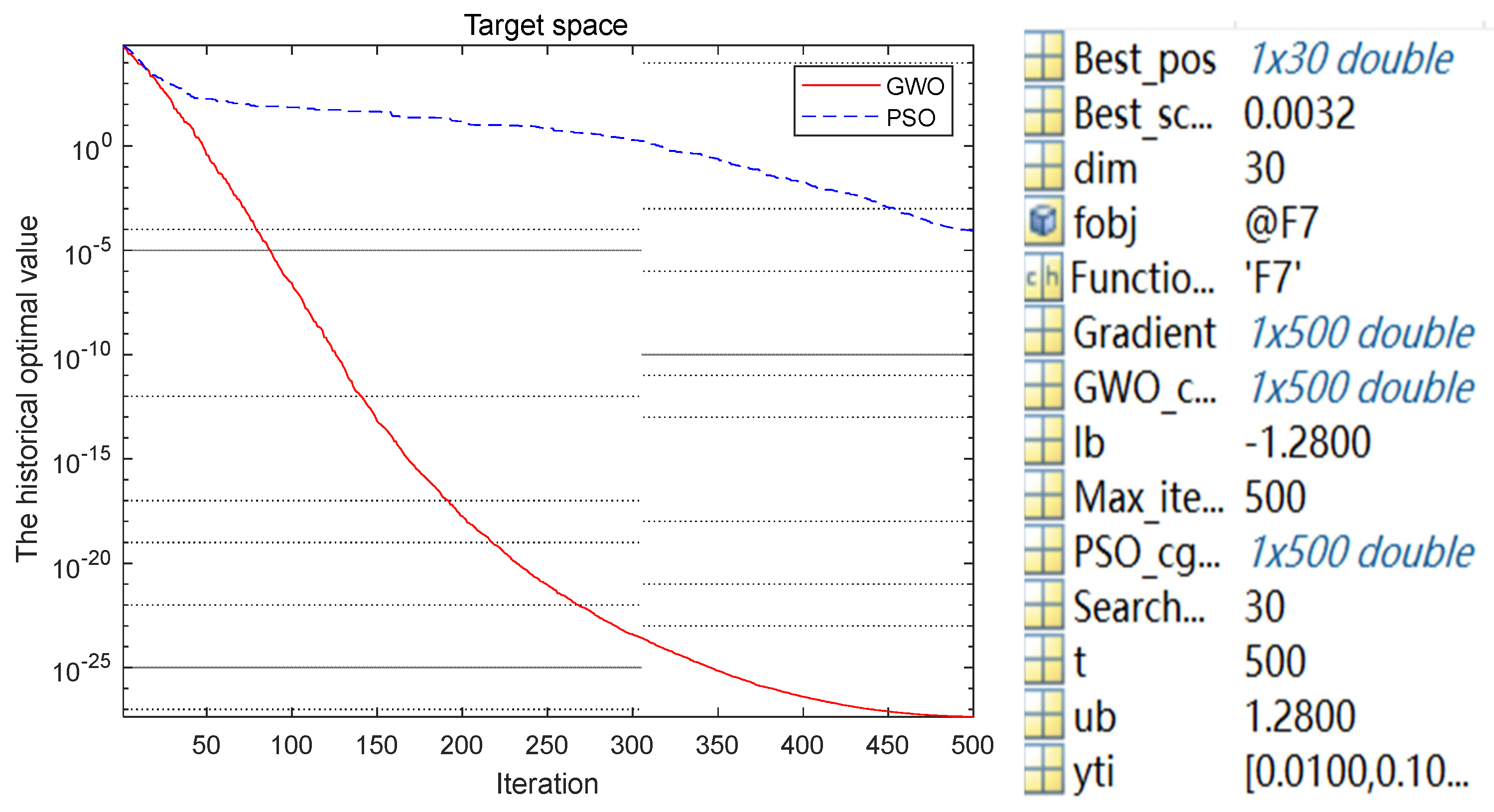
6.4. Comparison of Optimization Algorithms: A Comprehensive Study
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Valley | Peak | Valley | Peak | |
|---|---|---|---|---|
| Grid | 2:00–7:00 | 11:00–13:00 | 14:00–17:00 | 19:00–21:00 |
| Peak | Valley | Peak | Valley | |
|---|---|---|---|---|
| EVCS | 22:00–5:00 the next day | 7:00–12:00 | 13:00–16:00 | 18:00–21:00 |
| Factor i over Factor j | Quantization Value a |
|---|---|
| Equally important | 1 |
| Slightly important | 3 |
| Stronger importance | 5 |
| Strongly important | 7 |
| Extremely important | 9 |
| The middle of the above adjacency importance | 2, 4, 6, 8 |
| Matrix Order n | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| FRI | 0 | 0 | 0.58 | 0.9 | 1.12 | 1.24 | 1.32 | 1.41 | 1.45 | 1.49 |
| Nodes | Impact Factors | Nodes | Impact Factors | Nodes | Impact Factors |
|---|---|---|---|---|---|
| 1 | 1.3 | 11 | 0.8 | 21 | 0.9 |
| 2 | 1.4 | 12 | 1.0 | 22 | 0.7 |
| 3 | 1.5 | 13 | 1.2 | 23 | 1.4 |
| 4 | 1.3 | 14 | 1.3 | 24 | 1.2 |
| 5 | 0.7 | 15 | 1.3 | 25 | 1.1 |
| 6 | 0.9 | 16 | 1.1 | 26 | 1.0 |
| 7 | 0.7 | 17 | 0.9 | 27 | 0.9 |
| 8 | 0.6 | 18 | 0.7 | 28 | 0.7 |
| 9 | 1.2 | 19 | 1.2 | 29 | 0.6 |
| 10 | 1.1 | 20 | 1.2 | 30 | 0.2 |
| Network Node | Coordinates | Vehicle Flow/Vehicles | Network Node | Coordinates | Vehicle Flow/Vehicles |
|---|---|---|---|---|---|
| 1 | (77, 135) | 3164 | 16 | (77, 135) | 1458 |
| 2 | (208, 98) | 2145 | 17 | (405, 221) | 2394 |
| 3 | (156, 205) | 4265 | 18 | (268, 412) | 3179 |
| 4 | (284, 177) | 2210 | 19 | (372, 414) | 4380 |
| 5 | (349, 52) | 6154 | 20 | (420, 341) | 5250 |
| 6 | (485, 177) | 3201 | 21 | (706, 426) | 6101 |
| 7 | (501, 92) | 3155 | 22 | (551, 389) | 1122 |
| 8 | (663, 107) | 4290 | 23 | (333, 497) | 2443 |
| 9 | (664, 234) | 3371 | 24 | (551, 498) | 3158 |
| 10 | (515, 261) | 1233 | 25 | (794, 497) | 5186 |
| 11 | (668, 326) | 1387 | 26 | (901, 422) | 1281 |
| 12 | (183, 410) | 2288 | 27 | (746, 259) | 3449 |
| 13 | (29, 262) | 2295 | 28 | (775, 149) | 1273 |
| 14 | (73, 390) | 1304 | 29 | (908, 206) | 5308 |
| 15 | (171, 451) | 4486 | 30 | (828, 313) | 2578 |


Appendix B






References
- Tian, M.; Tang, B.; Yang, X.; Xia, X. Planning of electric vehicle charging station comprehensively considering the charging demand and the acceptance capacity of the distribution network. Power Syst. Technol. 2021, 45, 498–509. [Google Scholar]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2018, 25, 371–380. [Google Scholar] [CrossRef]
- Lu, S.; Ying, L.; Wang, X.; Li, W. Load forecasting and optimal dispatching of electric vehicle fast charging stations based on user travel simulation. Electr. Power Constr. 2020, 41, 38–48. [Google Scholar]
- Pal, A.; Bhattacharya, A.; Chakraborty, K. Allocation of electric vehicle charging station considering uncertainties. Sustain. Energy Grids Netw. 2021, 24, 38–48. [Google Scholar] [CrossRef]
- Cheng, S.; Chen, Z.; Xu, K.; Kang, Z.; Wei, Z. Orderly charging and discharging method of electric vehicles based on cooperative game and dynamic time-of-use electricity price. Power Syst. Prot. Control 2020, 48, 15–21. [Google Scholar]
- Ge, S.; Shen, K.; Liu, H. Urban fast charging network planning considering network transfer performance. Power Syst. Technol. 2020, 63, 1–13. [Google Scholar]
- Wu, Y.; Wang, Y.; Zhang, Y.; Xue, H.; Mi, Y. Location and capacity method of electric vehicle charging station based on improved immune clonal selection algorithm. Autom. Electr. Power Syst. 2021, 45, 1–11. [Google Scholar]
- Deb, S.; Gao, X.-Z.; Tammi, K.; Kalita, K.; Mahanta, P. A Novel Chicken Swarm and Teaching Learning based Algorithm for Electric Vehicle Charging Station Placement Problem. Energy 2020, 15, 12–18. [Google Scholar] [CrossRef]
- Yan, Q.; Liu, H.; Han, N.; Songsong, C.; Dongming, Y. An optimization method for the location and capacity of charging stations taking into account the temporal and spatial distribution of electric vehicles. Proc. Chin. Electr. Eng. 2021, 41, 1–14. [Google Scholar]
- Cheng, S.; Zhao, M.; Wei, Z. Optimal scheduling of electric vehicle charging and discharging with dynamic electricity prices. J. Electr. Power Syst. Autom. 2020, 31, 1–7. [Google Scholar]
- Zhang, J. Research on orderly charging strategy and charging facility planning of electric vehicles. Ph.D. Thesis, Taiyuan University of Technology, Taiyuan, China, 2018; pp. 8–11. [Google Scholar]
- Li, C.; Dong, Z.; Li, J.; Zhang, H.; Jin, Q.; Qian, K. Distributed energy storage cluster voltage regulation control strategy for distribution network. Autom. Electr. Power Syst. 2021, 45, 133–141. [Google Scholar]
- Cheng, S.; Zhao, M.; Wei, Z. Optimal Scheduling of Electric Vehicle Charging and Discharging Considering Dynamic Electricity Price. Proc. CSU-EPSA 2021, 33, 31–36+42. [Google Scholar]
- Cavus, M.; Allahham, A. Enhanced Microgrid Control through Genetic Predictive Control: Integrating Genetic Algorithms with Model Predictive Control for Improved Non-Linearity and Non-Convexity Handling. Energies 2024, 33, 1–20. [Google Scholar] [CrossRef]
- Shi, J.; Bao, Y.; Chen, Z.; Jiang, Z.; Zhang, W. A Robust Optimal Configuration Method for Charging Station Energy Storage Considering the Uncertainty of Charging Load. Autom. Electr. Power Syst. 2021, 10, 1–16. [Google Scholar]
- Ni, S.; Cui, C.; Yang, N.; Chen, H.; Xi, P.; Li, Z. Multi-time scale online reactive power optimization of distribution network based on deep reinforcement learning. Autom. Electr. Power Syst. 2021, 45, 77–85. [Google Scholar]
- Nezamoddini, N.; Wang, Y. Risk management and participation planning of electric vehicles in smart grids for demand re-sponse. Energy 2016, 20, 22–28. [Google Scholar]
- Wang, X. Research on Reactive Power Optimization of Multi-Scenario Distribution Network with Wind Turbines. Ph.D. Thesis, Xi’an University of Technology, Xi’an, China, 2019; pp. 28–31. [Google Scholar]
- Amin, Y.; Abbasian, J.M.; Ma, J. Electric vehicle charging station location determination with consideration of routing selection policies and driver’s risk preference. Comput. Ind. Eng. 2021, 69, 162–169. [Google Scholar]
- Lee, S.; Choi, D.H. Dynamic pricing and energy management for profit maximization in multiple smart electric vehicle charging stations: A privacy-preserving deep reinforcement learning approach. Appl. Energy 2021, 42, 304–315. [Google Scholar] [CrossRef]
- Ding, Y.; Yao, X.; Ge, X.; Bingxue, Y.; Jiawei, L.; Yu, S. Calculation and analysis of DC pole-tower gap operating impulse voltage based on Adaboost-SVR prediction. Proc. Chin. Soc. Electr. Eng. 2021, 41, 1–10. [Google Scholar]
- Pan, Z.; Zhang, X.; Yu, T.; Wang, D. Hierarchical real-time optimal scheduling of large-scale electric vehicle clusters. Autom. Electr. Power Syst. 2017, 41, 96–104. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Dai, Z.; Hou, J.X.; Huang, W.Q.; Hanju, L.; Bang, A.; Shang, C. Load balancing control of multi-source microgrid based on Gray Wolf Algorithm. Autom. Technol. Appl. 2024, 43, 84–87. [Google Scholar]
- Zhao, Y. Optimal Configuration of Energy Storage in Distribution Network Based on Improved Grey Wolf Algorithm. Acta Energiae Solaris Sin. 2023, 44, 84–87. [Google Scholar]
- Zhou, Y.; Yuan, Q.; Tang, Y.; Xin, W.; Liangcai, Z. Electric vehicle charging decision optimization method based on circuit-electric coupling network. Power Grid Technol. 2021, 45, 3563–3572. [Google Scholar]
- Zhao, H.; Xiang, Y.; Liu, J.; Shuai, H. Impact analysis of large-scale electric vehicle network access based on improved Distribution network security domain. Electr. Power Autom. Equip. 2021, 41, 66–73. [Google Scholar]


| Comparative Dimension | Regular Method | Method Proposed in This Article |
|---|---|---|
| Goals | Least economic cost | On the basis of reducing economic cost, meeting traffic flow demand and minimizing the impact on the power grid |
| Characteristics of EVCSs | Load | Negative energy storage unit |
| Grid impact considerations | Less | Multi-dimensional impact: voltage fluctuation, transmission line margin, network loss, peak cutting and valley filling regulation benefit |
| EVCS and power grid interaction | Discharge capacity is not considered; interaction is mainly analyzed through electricity price regulation | Considering the effect of charging and discharging behavior on the power grid, EVCS is regarded as a distributed power supply |
| Planning methods | 2m PEM, improved immune clone selection algorithm, CSO, TLBO, particle swarm optimization, etc. | Gray Wolf Optimization (GWO) algorithm |
| Spatiotemporal distribution prediction | Yes | Yes, considering the coupling effect between the traffic network and distribution network |
| Economic cost | Aims for minimal costs | Considers the cost, but this is not the only goal; pays more attention to the balance between grid operation and traffic flow |
| Economic losses for users | Not specifically mentioned | Considers user economic losses, with the goal of minimization |
| Electricity price regulation | Achieves orderly charging and discharging through electricity price regulation | Dynamic adjustment of electricity price to achieve orderly charging and discharging, but this is not the only means |
| Algorithm optimization | Multiple algorithms, but may not take into account power grids and transportation networks | GWO algorithm, integrated consideration of power grid and transportation network |
| Initial Charge Time | Initial SOC | |
|---|---|---|
| Electric buses | 23:00–5:30 the next day | Follow the normal distribution N (0.5, 0.12) |
| Electric taxis | 23:00–7:00 the next day 11:00–18:00 | Follow the normal distribution N (0.35, 0.12) |
| Electric official cars and special vehicles | 22:00–5:00 the next day | Follow the normal distribution N (0.6, 0.12) |
| Electric private cars | Working hours: 8:00–17:00 18:00–7:00 the next day | Follow the normal distribution N (0.7, 0.12) |
| EV Types | Capacity Size |
|---|---|
| Electric bus | 55 kWh |
| Electric taxi | 45 kWh |
| Electric official cars and special vehicles | 35 kWh |
| Electric private car | 35 kWh |
| Weights | Value | Weights | Value |
|---|---|---|---|
| K1 | 0.217 | K7 | 0.217 |
| K2 | 0.217 | K8 | 0.217 |
| K3 | 0.217 | K9 | 0.166 |
| K4 | 0.166 | K10 | 0.183 |
| K5 | 0.183 | K11 | 0.586 |
| K6 | 0.217 | K12 | 0.414 |
| Scheme | Nodes | Scheme | Nodes |
|---|---|---|---|
| Scheme 1 | 7 | Scheme 4 | 24 |
| Scheme 2 | 12 | Scheme 5 | 30 |
| Scheme 3 | 19 | Scheme 6 | 17 |
| Scheme | Node Traffic Flow | S5 objective Function Value | Scope of Service |
|---|---|---|---|
| Option 1 | 110.875 | 10.564 | 3 nodes |
| Scheme 2 | 34.001 | 8.231 | 4 nodes |
| Scheme 3 | 24.298 | 5.215 | 6 nodes |
| Scheme 4 | 22.700 | 1.061 | 10 nodes |
| Scheme 5 | 8.3467 | 4.103 | 7 nodes |
| Scheme 6 | 8.3328 | 3.213 | 9 nodes |
| Scheme | Nodes |
|---|---|
| Scheme 1 | 17, 7, 28 |
| Scheme 2 | 22, 21, 29 |
| Scheme 3 | 22, 13, 23 |
| Scheme 4 | 20, 7, 13 |
| Scheme 5 | 30, 15, 11 |
| Scheme 6 | 17, 21, 18 |
| Scheme | Node Traffic Flow | S5 Objective Function Value | Scope of Service (Number of Nodes) | ||||
|---|---|---|---|---|---|---|---|
| S5.1 | S5.2 | S5.3 | |||||
| Scheme 1 | 134.220 | 4.165 | 10.242 | 4.043 | 7 | 3 | 7 |
| Option 2 | 44.361 | 10.242 | 1.940 | 7.075 | 3 | 10 | 4 |
| Option 3 | 23.742 | 20.537 | 2.250 | 14.554 | 2 | 10 | 3 |
| Option 4 | 19.286 | 3.970 | 1.940 | 8.085 | 7 | 10 | 4 |
| Scheme 5 | 15.914 | 4.063 | 3.464 | 8.768 | 7 | 9 | 3 |
| Scheme 6 | 15.093 | 4.043 | 3.995 | 3.995 | 8 | 8 | 8 |
| Scheme | Scope Coverage | Number of Nodes with No Coverage | Coincidence Ratio | Percentage of No Overlay |
|---|---|---|---|---|
| Scheme 1 | 50.00% | 15 | 16.67% | 50.00% |
| Option 2 | 36.67% | 19 | 23.33% | 63.33% |
| Option 3 | 50.00% | 15 | 10.00% | 50.00% |
| Option 4 | 73.33% | 8 | 6.67% | 26.67% |
| Scheme 5 | 73.33% | 8 | 0% | 26.67% |
| Scheme 6 | 83.33% | 5 | 13.33% | 16.67% |
| Characteristics | GWO | PSO | Gradient Algorithm |
|---|---|---|---|
| Heuristic type | Swarm intelligence | Swarm intelligence | Gradient-based |
| Speed of convergence | Fast | Faster | Depends on function properties |
| Global search capability | Strong | Strong | Weak |
| Parameter quantity | Less | Less | Less |
| Applicability | Complex optimization problems | Extensive | Simple optimization problems |
| Sensitivity to initial solutions | Low | Low | High |
| Algorithm | Optimization Scheme (X1, X2, X3) | Composite Indicators | Grid Indicators (S1, S2, S3) | Road Network Indicators (S4, S5) | Convergence (500 Times) |
|---|---|---|---|---|---|
| GWO | (17, 21, 18) | 18.532 | (3.41, 57.48, 15.66) | (15.09, 1.05) | Yes |
| PSO | (19, 16, 23) | 26.92 | (3.53, 91.27, 15.62) | (23.74, 0.44) | No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, M.; Zhao, J.; Huang, W.; Wang, B.; Liu, X.; Ou, Z. Optimal Layout Planning of Electric Vehicle Charging Stations Considering Road–Electricity Coupling Effects. Electronics 2025, 14, 135. https://doi.org/10.3390/electronics14010135
Deng M, Zhao J, Huang W, Wang B, Liu X, Ou Z. Optimal Layout Planning of Electric Vehicle Charging Stations Considering Road–Electricity Coupling Effects. Electronics. 2025; 14(1):135. https://doi.org/10.3390/electronics14010135
Chicago/Turabian StyleDeng, Minghui, Jie Zhao, Wentao Huang, Bo Wang, Xintai Liu, and Zejun Ou. 2025. "Optimal Layout Planning of Electric Vehicle Charging Stations Considering Road–Electricity Coupling Effects" Electronics 14, no. 1: 135. https://doi.org/10.3390/electronics14010135
APA StyleDeng, M., Zhao, J., Huang, W., Wang, B., Liu, X., & Ou, Z. (2025). Optimal Layout Planning of Electric Vehicle Charging Stations Considering Road–Electricity Coupling Effects. Electronics, 14(1), 135. https://doi.org/10.3390/electronics14010135